Mech-Vision Notes de version
Notes de version de Mech-Vision 2.1.2
Ce document présente les nouvelles fonctionnalités, les améliorations et les problèmes résolus de Mech-Vision 2.1.2.
Nouvelles fonctionnalités
Ajout de la fonctionnalité « Correction automatique de la dérive de précision du système de vision »
La fonctionnalité Correction automatique de la dérive de précision du système de vision a été ajoutée à Mech-Vision 2.1.2. Le déploiement de cette fonctionnalité dans l’outil d’analyse des erreurs permet de corriger la dérive de précision du système de vision, d’améliorer sa stabilité et de réduire les coûts de maintenance ultérieurs.
Nouvelle procédure « Prétraitement du nuage de points »
La nouvelle procédure « Prétraitement du nuage de points » dans Mech-Vision 2.1.2 effectue des opérations de prétraitement telles que le filtrage de points, la fusion de nuages de points et le filtrage d’images sur le nuage de points original afin de supprimer les points parasites, accélérant ainsi le traitement des Étapes suivantes.
Ajout de la journalisation de l’historique des opérations
Mech-Vision 2.1.2 introduit la fonctionnalité de journalisation de l’historique des opérations, qui aide à restaurer les actions avant et après la survenue d’un problème, permettant une reproduction et une résolution rapides. Vous pouvez consulter l’historique des opérations sous l’onglet « Opération » dans le panneau Journal.
Améliorations
Amélioration de l’outil d’étalonnage de la caméra
La fonctionnalité « Enregistrer le résultat d’étalonnage » de l’outil d’étalonnage de la caméra a été améliorée dans Mech-Vision 2.1.2, permettant d’appliquer le groupe de paramètres d’étalonnage enregistré au projet en cours ou à tous les projets de la solution actuelle.
Amélioration de l’éditeur d’objet cible
L’Éditeur d’objet cible a été amélioré dans Mech-Vision 2.1.2. Voir ci-dessous pour plus de détails.
-
Adaptation de la fonctionnalité « Correction automatique de la dérive de précision du système de vision ».
Une étape « Collecter des données pour la correction de dérive » a été ajoutée à tous les flux de travail contenant l’étape « Enseigner le point de prise » dans l’éditeur d’objet cible. Si le point de prise d’un modèle d’objet cible a été ajouté en déplaçant le robot en mode jogging, une collecte de données supplémentaire pour la correction de dérive EIH/ETH est requise après l’activation de la fonctionnalité de correction de dérive dans la dernière version logicielle. Cette mise à jour permet une compensation de dérive efficace et une correction inverse, garantissant que les points de prise ajoutés par jogging du robot restent précis et fiables.
-
Amélioration du flux de travail « Importer un fichier STL ».
-
Le « Mode de génération de nuage de points » peut être sélectionné, permettant de générer un nuage de points à partir d’une vue spécifique ou d’une surface entière.
-
-
Amélioration du flux de travail « Jogger le robot et obtenir le nuage de points ».
-
Plusieurs points de prise peuvent être ajoutés en déplaçant le robot en mode jogging.
-
Une étape « Définir le point de prise » est ajoutée pour permettre l’ajustement des points de prise ajoutés par jogging du robot.
-
-
Amélioration du flux de travail « Importer un nuage de points traité ».
-
Lors de la création d’un objet cible, vous pouvez choisir de définir des points de prise via des Étapes de projet, une édition manuelle ou le jogging du robot. Les différentes méthodes de définition des points de prise correspondent à différents processus de configuration d’objet cible.
-
Les informations de projet importées seront enregistrées lors de l’enregistrement de l’objet cible ou de la fermeture de l’éditeur d’objet cible.
-
-
Amélioration du flux de travail « Modèle de nuage de points non requis ».
-
Le flux de travail « Reconnaître sans appariement » est renommé « Modèle de nuage de points non requis ».
-
En supprimant l’exclusion mutuelle entre ce flux de travail et les autres, vous pouvez l’utiliser pour créer plusieurs objets cibles, et les autres flux de travail de la même solution ne seront pas désactivés.
-
Si l’objet cible est un cylindre horizontal, après avoir ajusté le point de prise à la surface de l’objet cible, le point central de l’objet ne se déplacera pas.
-
Le point central de l’objet et le décalage du point de prise par rapport au point central de l’objet seront affichés dans la zone de visualisation. Le réglage de la visibilité du point de prise et du point central de l’objet dans les paramètres de visualisation n’est pas pris en charge.
-
-
Autres améliorations
-
Dans l’étape « Éditer le modèle », la génération de normales de nuage de points inversées est désormais prise en charge.
-
Dans l’étape « Définir le point de prise », l’option de traiter le résultat de vision avec des tableaux de points de prise est disponible. Cette fonctionnalité n’est pas prise en charge dans le flux de travail « Modèle de nuage de points non requis ».
-
Dans l’étape « Définir le point de prise », lors de l’aperçu de l’effet de prélèvement, l’outil affiché dans la zone de visualisation est le premier outil activé, et non le premier de la liste des outils.
-
Dans l’étape « Enseigner le point de prise », les TCP et poses de bride du robot saisis pour les points de prise seront désormais enregistrés lorsque l’objet cible est enregistré et que l’éditeur d’objet cible est fermé, et ne seront plus effacés. Notez que si plusieurs poses de bride du robot pour les points de prise sont saisies, seule la dernière sera enregistrée lors de la fermeture de l’éditeur d’objet cible.
-
Dans tous les flux de travail de configuration, le point central de l’objet et les points de prise ne s’influencent plus mutuellement — la modification de l’un ne changera plus l’autre.
-
La fonctionnalité mesure est prise en charge dans la zone de visualisation.
-
Le message d’erreur affiché lors de l’enregistrement d’un objet cible dans l’éditeur d’objet cible a été amélioré.
-
Lors de la saisie de poses dans l’éditeur d’objet cible, la convention d’angles d’Euler bascule automatiquement en fonction du modèle de robot sélectionné dans « Configuration de la communication du robot ».
-
Amélioration de l’étape « Capturer des images depuis la caméra »
Les étapes « Capturer des images depuis la caméra » ont été améliorées dans Mech-Vision 2.1.2.
-
La sélection d’un nom de service robot à partir de la liste déroulante du paramètre « Nom du service robot dans le composant de communication » est prise en charge.
-
La valeur par défaut du paramètre « Type d’image 2D » a été modifiée de « Image IR interne » à « Image couleur externe ».
-
Lorsque le « Type d’image 2D » est défini sur « Image couleur externe », le paramètre « Rectifier vers carte de profondeur » n’est pas sélectionné par défaut.
Amélioration de la fonctionnalité « Déclencher le flux de contrôle en l’absence de sortie » dans les étapes « Reconnaissance d’objet cible 3D » et « Ajuster les poses V2 »
Dans Mech-Vision 2.1.2, lorsque « Déclencher le flux de contrôle en l’absence de sortie » est sélectionné dans les étapes « Reconnaissance d’objet cible 3D » et « Ajuster les poses V2 », le flux de contrôle peut désormais être déclenché comme prévu.
Amélioration des performances d’exécution des étapes d’appariement 3D
Mech-Vision 2.1.2 a amélioré les performances d’exécution des étapes d’appariement 3D, réduisant le temps d’exécution lorsque plusieurs étapes d’appariement 3D sont exécutées simultanément.
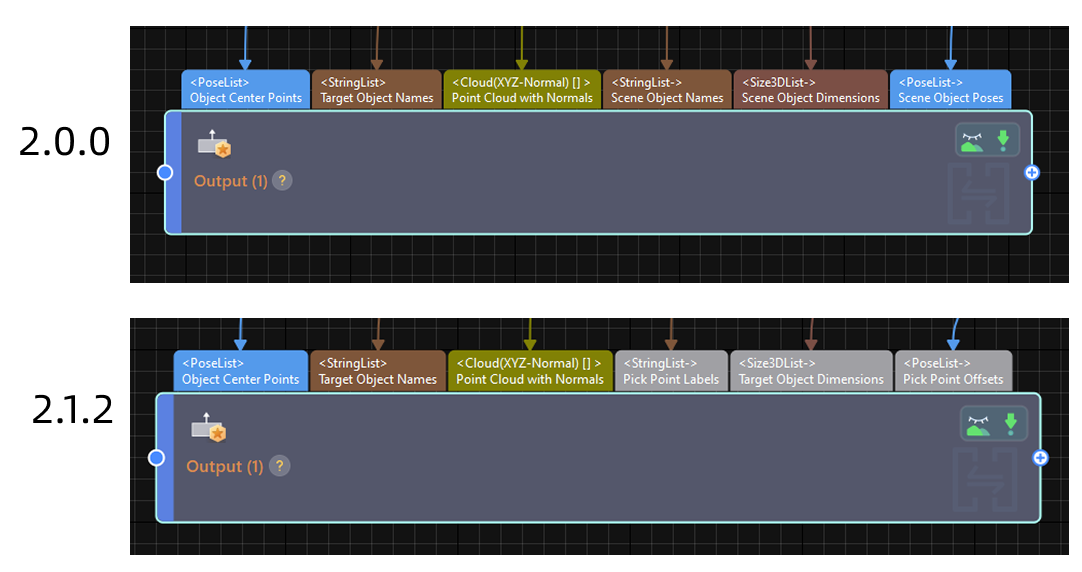
Amélioration de l’étape « Sortie »
L’étape Sortie a été améliorée dans Mech-Vision 2.1.2. Voir ci-dessous pour plus de détails.
-
Ajout du paramètre « Correction automatique de la dérive de précision du système de vision ». Une fois sélectionnées, les dernières données de correction de dérive générées seront utilisées pour corriger la dérive de précision du système de vision. Ce paramètre ne sera affiché qu’après le déploiement de la fonctionnalité Correction automatique de la dérive de précision dans le système de vision EIH/ETH.
-
Lorsque l’objet cible est enregistré en utilisant le flux de travail « Modèle de nuage de points non requis » dans l’éditeur d’objet cible, le point de prise doit être saisi directement, et l’étape restituera le même point de prise que celui saisi.
-
L’option par défaut pour « Type de port » est passée de « Prédéfini (trajet robot) » à « Prédéfini (résultat de vision) ».
-
L’option « Appariement » du paramètre « Sélectionner le scénario » a été renommée « Appariement (Chargement de machine/Positionnement/Assemblage) » afin de préciser plus clairement les scénarios d’utilisation.
-
Un nouveau paramètre « Objet cible sans modèle de nuage de points » est ajouté. Veuillez configurer ce paramètre lorsque le scénario d’utilisation est défini sur « Dépalettisation » ou « Autres ».
-
Le paramètre « Supprimer le nuage de points de l’objet cible » a été renommé « Supprimer le nuage de points de forme irrégulière ». Ce paramètre supprime les nuages de points qui se chevauchent avec le modèle de collision d’objets cibles dotés de formes 3D non standard, aidant à prévenir les interférences lors de la détection de collision.
-
Lorsque le « Type de port » est défini sur « Personnalisé », des nuages de points peuvent être envoyés à un service externe.
-
Lors de l’ouverture d’une solution créée avec une version antérieure dans Mech-Vision 2.1.2, si un port de l’étape « Sortie » était précédemment connecté et que le paramètre associé est désélectionné, le port deviendra grisé au lieu d’être masqué, et le flux de données restera connecté.
Par exemple, dans une solution créée avec une version antérieure, les ports liés à l’objet de scène de l’étape « Sortie » étaient connectés. Après l’ouverture de cette solution dans Mech-Vision 2.1.2 et la désélection du paramètre « Mettre à jour l’objet de scène », les ports liés à l’objet de scène seront grisés, mais le flux de données ne sera pas déconnecté. Dans ce cas, le flux de données connecté aux ports liés à l’objet de scène doit être supprimé manuellement.
|
Pour les autres problèmes de compatibilité concernant l’étape Sortie, veuillez vous référer à Avant la mise à niveau. |
Amélioration de l’étape « Planification de trajectoire »
L’étape Planification de trajectoire a été améliorée dans Mech-Vision 2.1.2. Voir ci-dessous pour plus de détails.
-
L’option « Appariement » du paramètre « Sélectionner le scénario » a été renommée « Appariement (Chargement de machine/Positionnement/Assemblage) » afin de préciser plus clairement les scénarios d’utilisation.
-
Un nouveau paramètre « Objet cible sans modèle de nuage de points » est ajouté. Veuillez configurer ce paramètre lorsque le scénario d’utilisation est défini sur « Dépalettisation » ou « Autres ».
-
Le paramètre « Supprimer le nuage de points de l’objet cible » a été renommé « Supprimer le nuage de points de forme irrégulière ». Ce paramètre supprime les nuages de points qui se chevauchent avec le modèle de collision d’objets cibles dotés de formes 3D non standard, aidant à prévenir les interférences lors de la détection de collision.
-
Lors de l’ouverture d’une solution créée avec une version antérieure dans Mech-Vision 2.1.2, si un port de l’étape « Planification de trajectoire » était précédemment connecté et que le paramètre associé est désélectionné, le port deviendra grisé au lieu d’être masqué, et le flux de données restera connecté.
|
Pour les autres problèmes de compatibilité concernant l’étape Planification de trajectoire, veuillez vous référer à Avant la mise à niveau. |
Amélioration de l’étape « Générer une stratégie de prélèvement pour l’objet cible »
L’étape Générer une stratégie de prélèvement pour l’objet cible a été améliorée dans Mech-Vision 2.1.2. Voir ci-dessous pour plus de détails.
-
Un paramètre « Objet cible sans modèle de nuage de points » a été ajouté. Ce paramètre peut être configuré lorsque la « Méthode de conversion des données » est définie sur « Générer une stratégie de prélèvement basée sur le point central de l’objet » ou « Générer un point de prise basé sur le point central de l’objet ».
-
Si le port d’entrée « Noms des objets cibles » est connecté et que le paramètre « Objet cible sans modèle de nuage de points » est configuré, l’étape priorisera le nom de l’objet cible fourni via le port d’entrée « Noms des objets cibles ».
-
Si le port d’entrée « Noms des objets cibles » n’est pas connecté, ou est connecté mais aucun nom d’objet cible n’est obtenu, l’étape l’obtiendra selon le paramètre « Objet cible sans modèle de nuage de points ».
-
-
Lorsque l’objet cible est enregistré en utilisant le flux de travail « Modèle de nuage de points non requis » dans l’éditeur d’objet cible, le point central de l’objet fourni en entrée à l’étape est identique au point de prise produit en sortie.
Interface de production plus conviviale.
L’interface de production a été améliorée dans Mech-Vision 2.1.2. Voir ci-dessous pour plus de détails.
-
Amélioration du configurateur d’interface de production.
-
Lors de la configuration des vues d’exécution, vous pouvez désormais ajouter plusieurs vues d’exécution et personnaliser la source du nuage de points pour la vue « Séquence de prélèvement ».
-
Dans les paramètres généraux, vous pouvez désormais définir l'« Écran de démarrage par défaut » et choisir si vous souhaitez « Basculer automatiquement d’unité de production pendant l’exécution ».
-
-
Interface de production plus conviviale.
-
La fonctionnalité Surveillance de la dérive de précision du système de vision a été introduite. Après le déploiement de la fonctionnalité Correction automatique de la dérive de précision du système de vision EIH/ETH :
-
Vous pouvez surveiller la compensation de dérive en temps réel dans la zone de statut de l’interface de production.
-
Dans la zone d’opération de l’interface de production, cliquer sur « Maintenance » permet d’accéder à l’onglet « Correction de dérive (EIH/ETH) », où vous pouvez surveiller la dérive de précision et l’état de la correction de dérive dans le système de vision.
-
-
Les recettes de production peuvent être éditées dans le panneau Informations sur l’objet cible et la recette.
-
L’affichage de l’éditeur le plus récent est désormais pris en charge dans la fenêtre de recette de production.
-
Amélioration de la fonctionnalité « Contrôle d’accès à la solution »
La fonctionnalité Contrôle d’accès à la solution a été améliorée dans Mech-Vision 2.1.2.
-
Lors de l’ajout d’un compte, vous pouvez désormais définir un nom d’utilisateur, et le nom d’utilisateur comme le mot de passe doivent être uniques.
-
Vous pouvez désormais activer la déconnexion automatique après inactivité pour chaque rôle et personnaliser le délai d’inactivité.
-
Les paramètres de méthode de connexion s’appliquent globalement.
|
Amélioration de la bibliothèque d’étapes
La bibliothèque d’étapes a été améliorée dans Mech-Vision 2.1.2. Certaines étapes ont été supprimées. Voir ci-dessous pour plus de détails.
| N° | Étape supprimée | Étape alternative |
|---|---|---|
1 |
Mapper vers plusieurs points de prise |
|
2 |
Prédire les poses d’objet (Sim2Pick) |
N/A |
Amélioration de l’éditeur de recettes de paramètres
L’Éditeur de recettes de paramètres a été amélioré dans Mech-Vision 2.1.2. Voir ci-dessous pour plus de détails.
-
La copie des recettes de paramètres disponibles est prise en charge.
-
Les noms des paramètres dans la recette de paramètres peuvent être personnalisés.
Amélioration de la méthode d’enregistrement des journaux liés au résultat de sortie
La méthode d’enregistrement des journaux liés aux résultats de sortie a été améliorée dans Mech-Vision 2.1.2, comme détaillé ci-dessous.
-
Les résultats de sortie sont imprimés dans le panneau du journal uniquement lorsque la fonctionnalité « Sortie de débogage » est activée.
-
Lorsque Mech-Vision est déclenché par un dispositif externe, les résultats de sortie ne seront pas imprimés dans le panneau du journal ni enregistrés dans le journal. Si la fonctionnalité « Stockage des données » est activée, les résultats de sortie seront enregistrés dans le chemin désigné spécifié par la fonctionnalité « Stockage des données ».
Problèmes résolus
Les problèmes suivants ont été résolus dans Mech-Vision 2.1.2 :
-
L’ouverture d’un trop grand nombre de projets Mech-Vision pouvait provoquer le plantage du logiciel.
-
Dans l’étape « Capturer des images depuis la caméra », si le « Nom du service robot dans le composant de communication » n’était pas défini et que la « Pose de bride pendant la capture » était saisie manuellement, la convention des angles d’Euler revenait par défaut à « X → Y → Z » et ne pouvait pas être modifiée. Cela empêchait la saisie correcte de la pose de capture et affectait les résultats du projet.
-
L’étalonnage main-œil utilisant des robots 4 axes ou 5 axes pouvait produire des paramètres extrinsèques incorrects.
-
Le programme d’exemple de robot FANUC généré par la fonctionnalité « Correction automatique de la dérive de précision dans le système de vision ETH » contenait des erreurs.
-
Si un objet cible ne possédait qu’un modèle de nuage de points d’arête, et que le modèle était aligné avec le modèle de collision dans l’éditeur d’objet cible, l’alignement était perdu lors de la réouverture de l’éditeur d’objet cible.
-
Après avoir activé la « Symétrie rotationnelle de l’objet cible tenu » pour un objet cible spécifique dans l’éditeur d’objet cible, le réglage était incorrectement appliqué à tous les objets cibles.
-
Lors de la création d’un objet cible à l’aide de formes 3D telles que « Surface supérieure de parallélépipède » ou « Surface supérieure de cylindre » dans l’éditeur d’objet cible, le point de prise généré sur la base du point central de l’objet pendant l’exécution du projet était imprécis.
-
Dans certains cas, après avoir enseigné un point de prise manuellement et inversé la pose de bride du robot correspondante de 180°, enseigner de nouveau le robot avec la pose inversée produisait toujours le même point de prise qu’auparavant.
-
Lorsque l’option « Recharger le fichier » était activée dans l’étape « Reconnaissance d’objet cible 3D », le déclenchement du projet Mech-Vision via des commandes d’Interface Standard provoquait occasionnellement une erreur : « Projet non enregistré dans la solution ».
-
L’exécution de l’étape « Reconnaissance d’objet cible 3D » avec des données spécifiques pouvait entraîner le plantage de l’étape.
Si la solution a été créée avec des versions logicielles antérieures, le problème peut encore se produire. Veuillez recréer la solution avec la version 2.1.2 ou contacter le support technique.
-
Le mouvement linéaire défini dans l’étape « Planification de trajectoire » pouvait ne pas prendre effet, amenant le robot à effectuer à la place un mouvement articulé.
-
Dans de rares cas, l’exécution du calcul de nuage de points avec certaines données causait des erreurs d’exécution du projet.
-
Des points manquants apparaissaient le long des arêtes de l’objet cible dans le nuage de points produit par l’étape « De carte de profondeur à nuage de points ».
-
L’exécution de l’étape « Valider les masques d’objet boîte » avec des données d’image collectées à l’aide de versions logicielles antérieures à 2.0.0 provoquait le plantage du logiciel.
-
Lors du déclenchement d’un projet utilisant une caméra virtuelle via la communication Interface Standard, un code d’erreur incorrect était renvoyé.
-
La vérification de la mémoire vidéo ne fonctionnait pas comme prévu, ce qui pouvait provoquer des plantages du logiciel dus à un dépassement de mémoire lors de l’utilisation de fonctionnalités gourmandes en mémoire, telles que l’affichage des sorties visuelles ou l’interface de production.