Repère de référence
Ce sujet présente les concepts de base et les types courants de repères de référence utilisés dans la planification de trajectoire des robots, le guidage par vision et la localisation de l’objet cible.
Un repère de référence est un système de coordonnées utilisé pour décrire la position et l’orientation d’un objet dans l’espace 3D. Il est généralement représenté par un système de coordonnées cartésiennes 3D avec trois axes mutuellement perpendiculaires (X, Y, Z). Tout point dans l’espace peut être exprimé par ses coordonnées (x, y, z).
Repère monde
Le repère monde sert de repère de base pour toute la zone de simulation. Dans Mech-Viz, ce repère est centré à l’origine de la zone de simulation 3D et est utilisé pour décrire de manière uniforme les poses de tous les objets de la scène.
Repère de référence du robot
Le repère du robot est le repère de base du robot défini par le fabricant du robot, et il peut être utilisé pour décrire la position de la bride du robot ou de l’outil. Ce repère est généralement le repère par défaut dans le boîtier d’enseignement du robot et sert de base au déploiement du système de vision et à la planification de trajectoire.
| La pose de l’outil est définie sur la base de ce repère dans Mech-Viz. Lorsque le robot est dans son état immobile par défaut, il coïncide avec le repère monde. |
La position du repère de référence du robot est définie par chaque fabricant et peut varier selon les marques. Voici des exemples courants :
-
ABB : Situé sous la base.
-
FANUC : Situé dans le plan de rotation du deuxième axe.
-
KAWASAKI série R : Situé dans le plan de rotation du deuxième axe ; autres modèles sous la base.
-
KUKA : Situé sous la base.
-
YASKAWA : Situé dans le plan de rotation du deuxième axe.
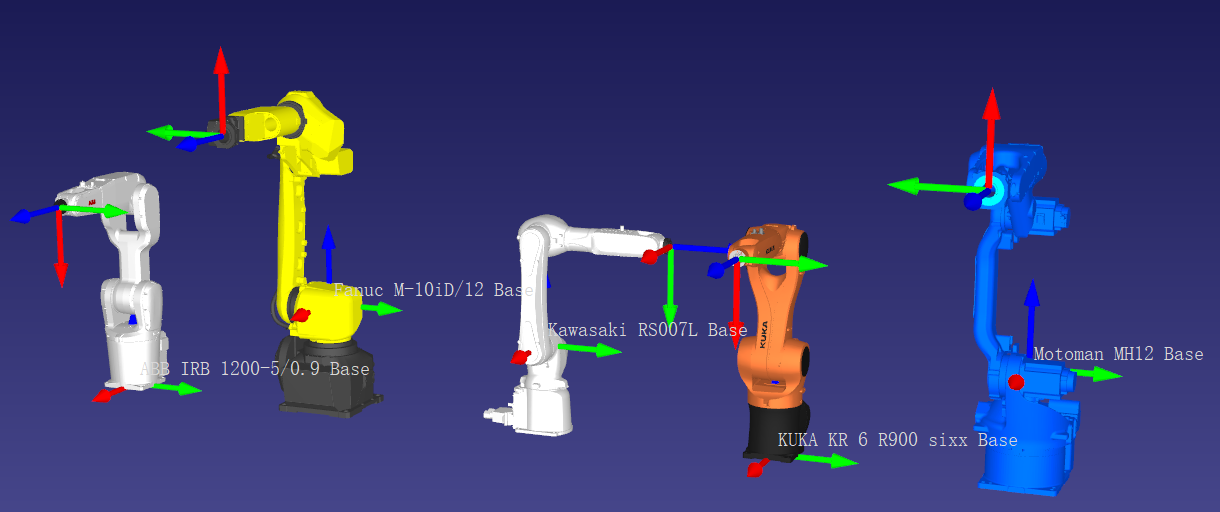
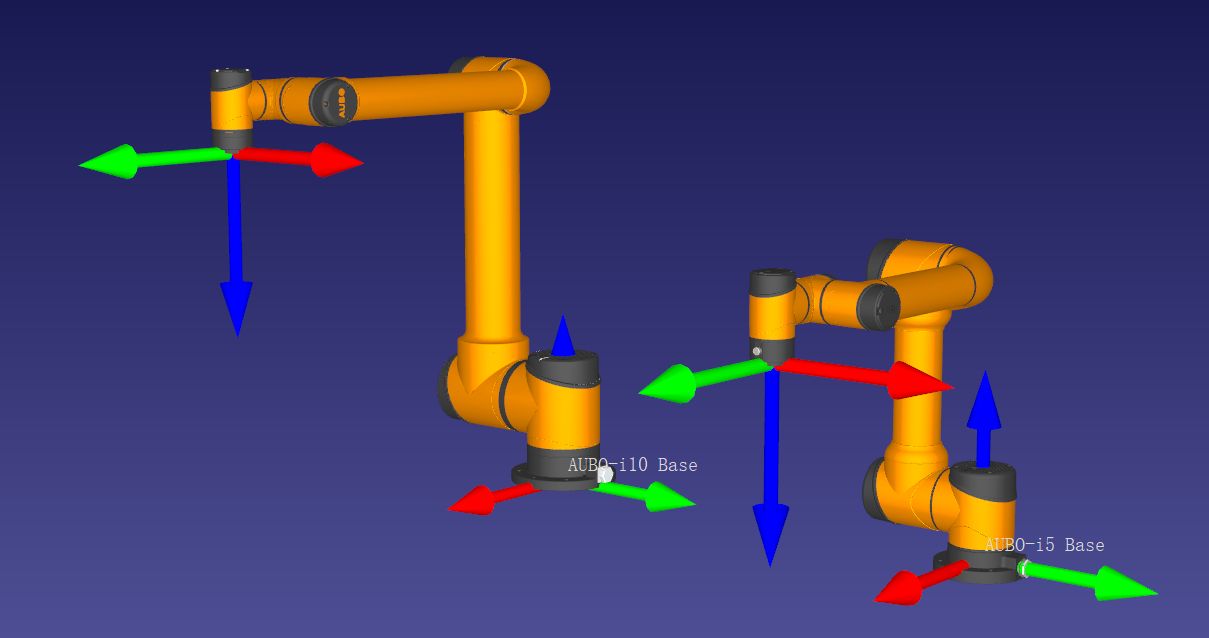
Pour certains modèles, tels que l’AUBO i5 ou certains robots d’autres fabricants, le repère peut être situé légèrement au-dessus de la base (environ 2 mm à 1 cm).
L'orientation des axes du repère diffère également selon les fabricants :
-
ABB, FANUC, KUKA, YASKAWA : L’axe X (flèche rouge sur la figure) pointe vers l’avant du robot.
-
KAWASAKI : L’axe Y (flèche verte sur la figure) pointe vers l’avant du robot.
| Lors du déploiement d’un système de vision, il est recommandé de vérifier d’abord si le repère utilisé dans le contrôleur du robot est le repère du robot par défaut ou un repère défini par l’utilisateur avant de configurer le système de vision. Comme les fabricants définissent différemment le repère du robot, les valeurs de pose de l’outil affichées sur le boîtier d’enseignement du robot peuvent ne pas correspondre aux valeurs affichées dans Mech-Viz. Au démarrage du projet, il est conseillé de comparer le TCP entre le robot et Mech-Viz. En cas d’écarts, vous pouvez ajuster les paramètres concernés en cliquant avec le bouton droit sur le nom du robot dans l'arbre des ressources du projet de Mech-Viz, en sélectionnant Ouvrir le répertoire des fichiers du robot, puis en modifiant le [robot]_algo.json fichier. |
Repère de référence de la caméra
Le repère de référence de la caméra est défini par le fabricant de la caméra et décrit la position et l’orientation des objets dans le champ de vision de la caméra. Il est couramment utilisé pour la calibration des paramètres extrinsèques afin d’établir la relation spatiale entre la caméra et le repère du robot, ce qui permet des tâches guidées par la vision et la planification de trajectoire.
L'origine du repère de la caméra 3D industrielle Mech-Mind est généralement située au centre optique de la caméra 2D principale. Les axes du repère de référence sont définis comme suit : l’axe Z coïncide avec l’axe optique de la caméra, perpendiculaire au plan d’imagerie, et pointe dans la direction d’imagerie ; les axes X et Y sont parallèles au plan d’imagerie, leurs directions suivant la règle de la main droite.

Repère de référence de l’objet cible
Le repère de référence de l’objet cible sert de repère fondamental de l’objet cible, décrivant sa position et son orientation dans l’espace. Contrairement au repère du robot et au repère de la caméra, le repère de l’objet cible est généralement défini par l’utilisateur en fonction de la géométrie de l’objet cible et des exigences de la tâche. Cela permet une adaptation pour la préhension, la dépose et la symétrie de rotation.
| Dans les versions Mech-Viz 1.8.0 et antérieures, le repère de l’objet cible était défini au point central de l’objet (centre géométrique). |
- Point de prise de l’objet cible
-
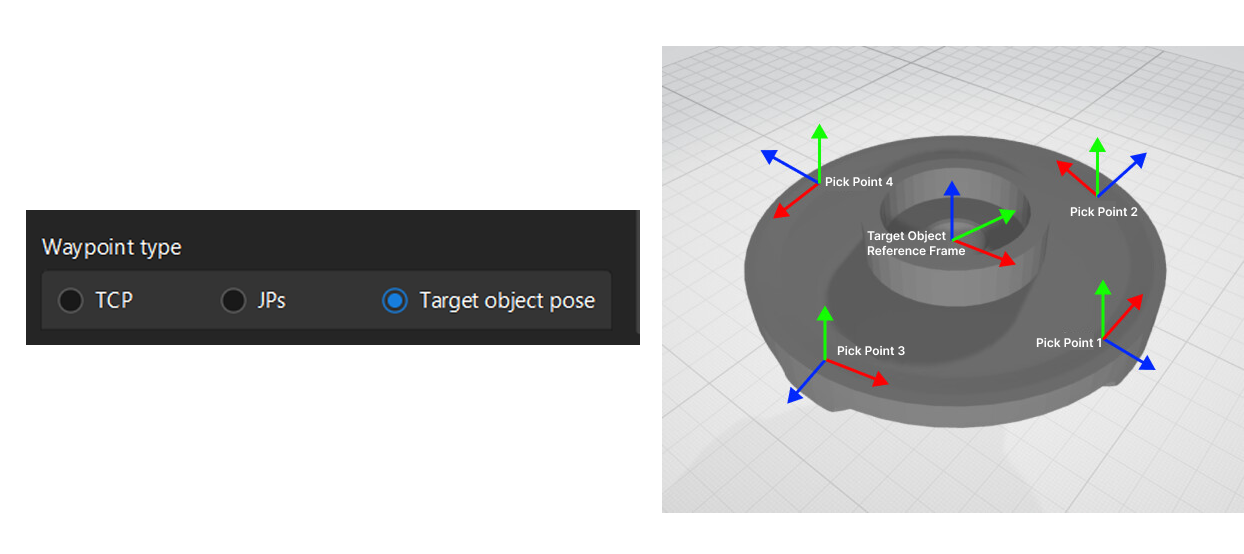
Un ou plusieurs points de prise peuvent être définis dans le repère de l’objet cible. Ces points de prise seront générés par Mech-Vision. Lors de la prise d’un objet cible, le robot déplace son TCP vers le point de prise de sorte que leurs origines et axes X sont alignés, tandis que leurs axes Y et Z sont orientés en sens opposés.
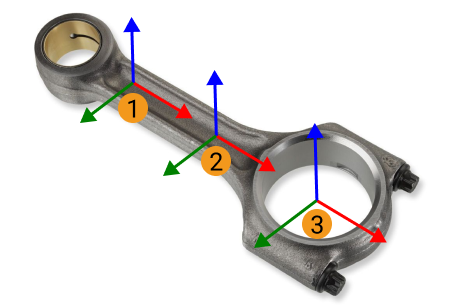
Parmi eux, ① et ② sont les points de prise d’arbres, tandis que ③ est le point de prise du centre de l’anneau.
- Placement de la pose de l’objet cible
-
Lors de la dépose d’un objet cible selon sa pose dans Mech-Viz, le robot aligne le repère de l’objet cible avec la pose cible définie dans l’espace. En d’autres termes, le repère de l’objet cible sert de point de référence lors de la dépose de l’objet sur la base de sa pose.
- Symétrie de rotation de l’objet cible
-
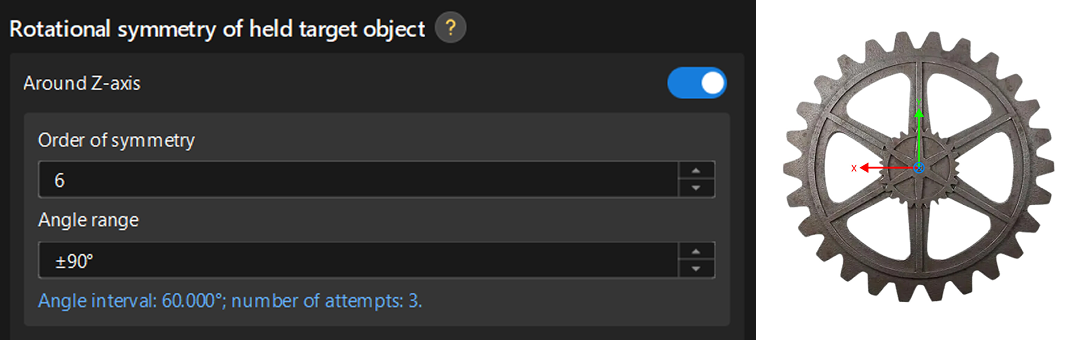
Lorsque l’objet cible présente une symétrie de rotation, le centre de rotation est généralement défini à l’origine du repère de l’objet cible. Vous pouvez spécifier l’axe de coordonnée du repère comme axe de rotation. Par exemple, un engrenage présente une symétrie de rotation de 60°, et son axe de rotation est l’axe Z du repère de l’objet cible. Cette configuration peut être utilisée pour générer automatiquement des points de prise symétriques en rotation.
Repère de référence de l’outil
Le repère de référence de l’outil est le système de coordonnées défini sur l’outil du robot. Son origine est généralement située au point central de l’outil (TCP).
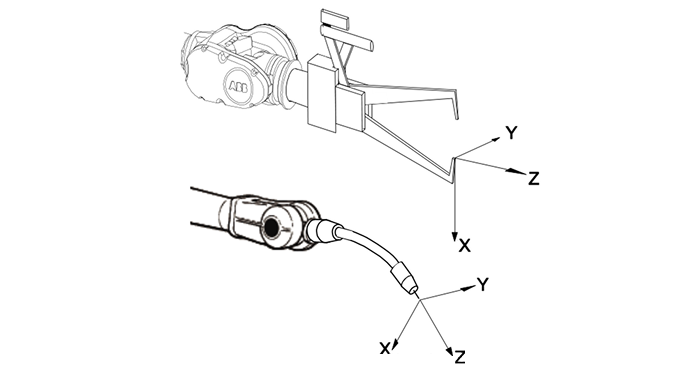
Grâce à ce repère, vous pouvez définir le TCP, qui est la pose du repère de l’outil dans le repère du robot, ainsi que la pose de l’objet cible tenu, qui est la pose du repère de l’objet cible par rapport au repère de l’outil lorsque l’objet est tenu. Ces définitions sont utilisées pour la planification de prise et les tâches guidées par la vision.