Transformer les nuages de points
Fonction
Cette Étape peut transformer des nuages de points d’un référentiel à un autre, ou effectuer une transformation dans son propre référentiel en fonction de la pose de référence.
Scénario d’utilisation
Cette Étape est généralement utilisée pour transformer des nuages de points entre le référentiel de la caméra et le référentiel du robot.
Si vous utilisez un robot portique, veuillez utiliser l’Étape Transformer les nuages de points pour portique.
Paramètres
Paramètres de transformation
- Type de transformation
-
Description du paramètre : Ce paramètre est utilisé pour sélectionner le type de transformation du nuage de points.
Paramètre par défaut : CameraToRobot.
Options : CameraToRobot, RobotToCamera, AllWithFirst, FirstWithAll, UseCorrespondenceInput, and AffineTransform.
Instructions :
-
CameraToRobot : Transformer les nuages de points du référentiel de la caméra vers le référentiel du robot. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
Robot vers caméra : Transformer les nuages de points du référentiel du robot vers le référentiel de la caméra. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
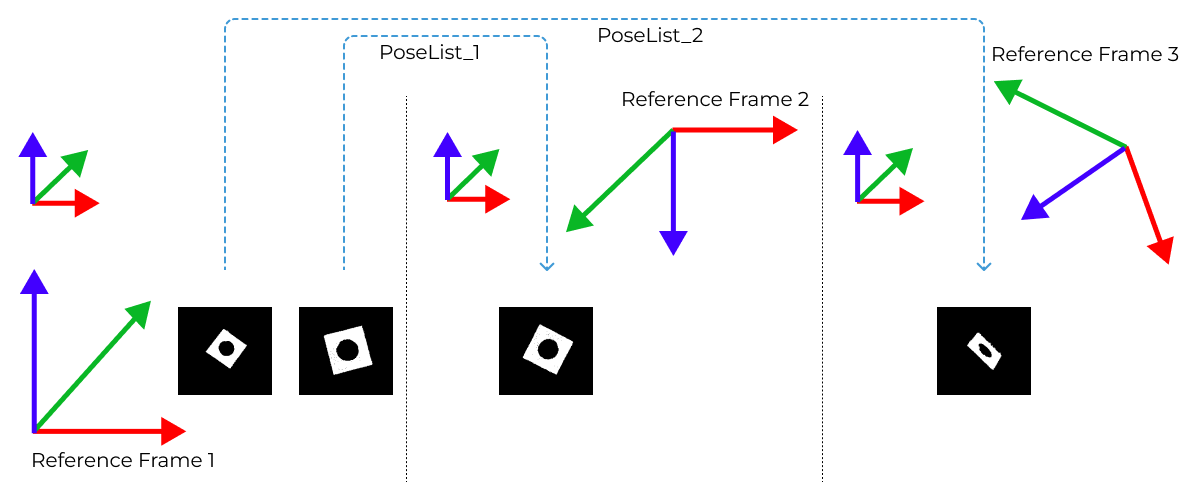
Tous vers le premier : Transformer le nuage de points original vers le référentiel de la première pose de référence en entrée. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
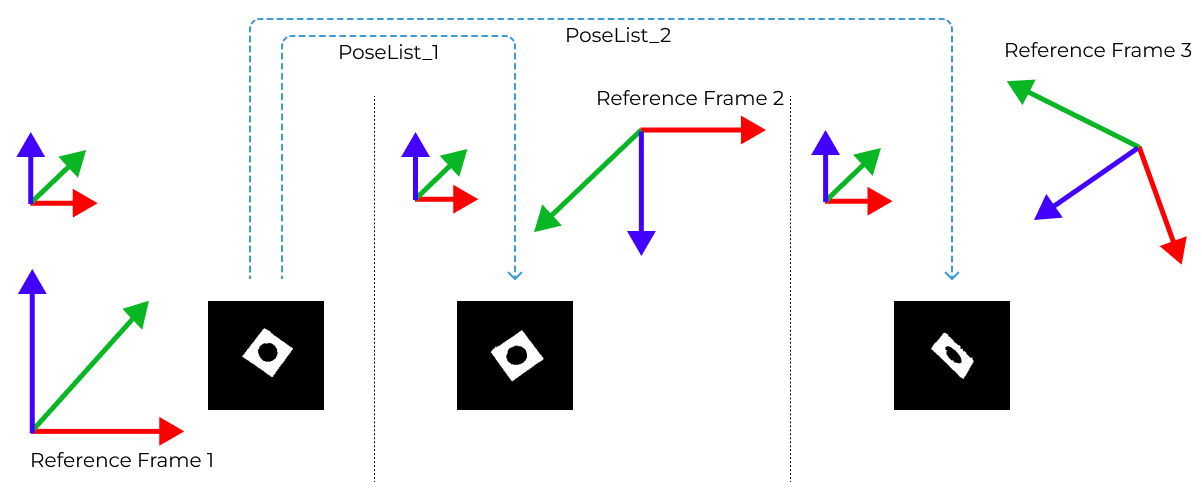
Premier vers tous : Transformer le premier nuage de points original vers le référentiel de chaque pose de référence dans la liste des poses en entrée, respectivement. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
UseCorrespondenceInput : Transformer les nuages de points originaux vers un autre référentiel selon les poses de référence correspondantes, respectivement. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
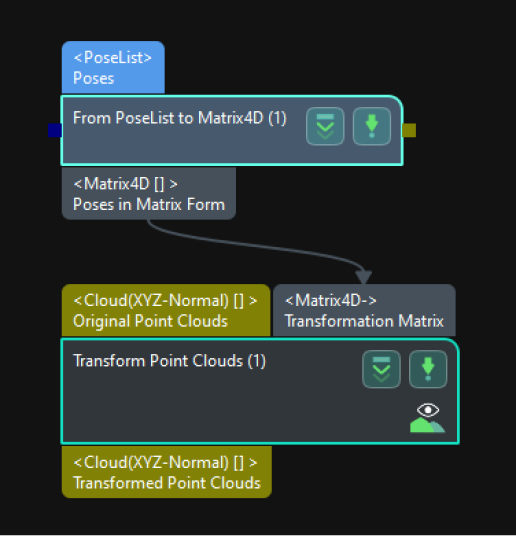
AffineTransform : Transformer les nuages de points avec une matrice affine. La liste de poses doit d’abord être convertie au format matrix4D avec l’Étape Step From PoseList to Matrix4D, puis être utilisée en entrée. Veuillez consulter exemple de réglage pour le résultat correspondant.
-
Exemples
CameraToRobot
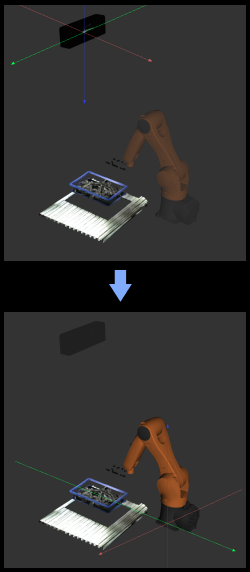
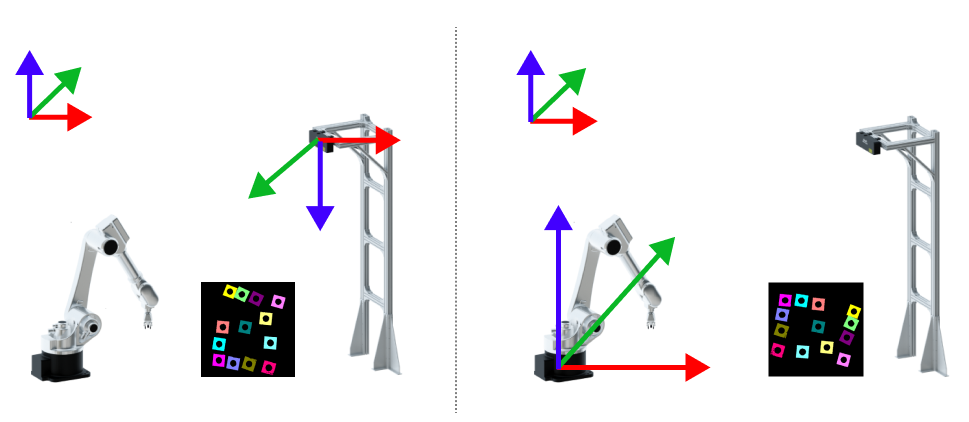
La figure suivante montre les résultats avant (à gauche) et après (à droite) la transformation du nuage de points de CameraToRobot.
RobotToCamera
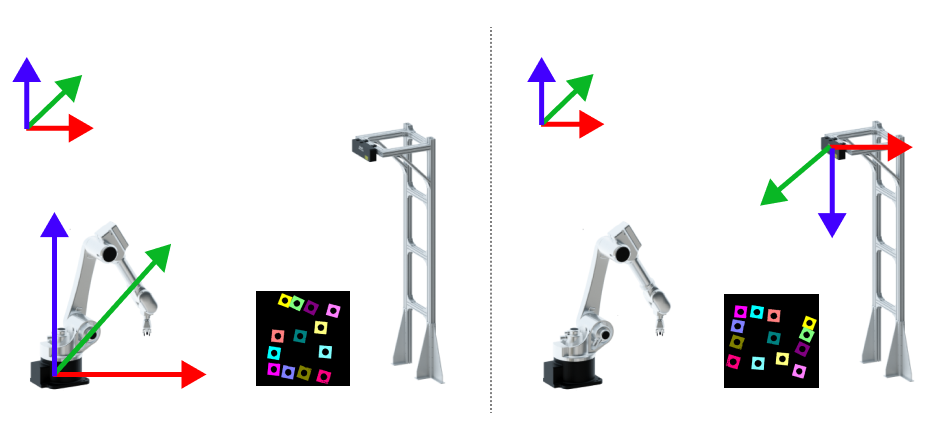
La figure suivante montre les résultats avant (à gauche) et après (à droite) la transformation du nuage de points de RobotToCamera.
AllWithFirst
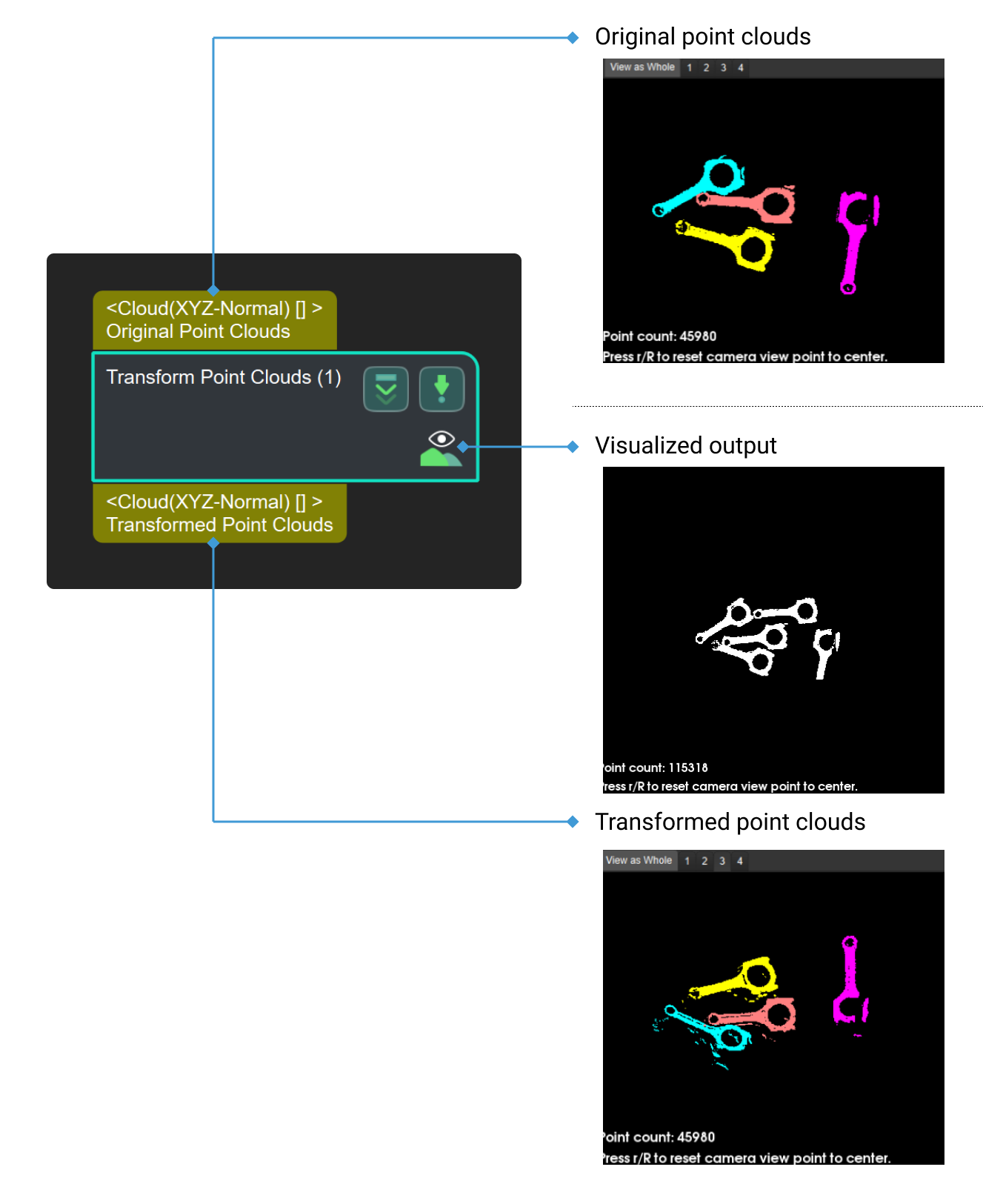
La figure suivante montre les résultats avant (à gauche) et après (à droite) la transformation du nuage de points de AllWithFirst.
FirstWithAll
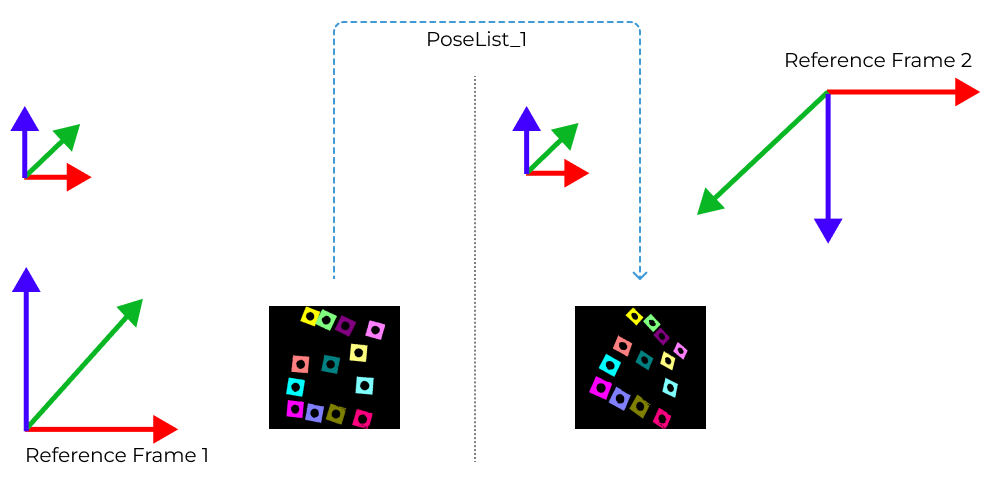
La figure suivante montre le résultat de la transformation du nuage de points de FirstWithAll.