Translater des poses le long d’une direction donnée
Scénario d’utilisation
Cette étape effectue une translation des poses selon la direction et la distance définies par l’utilisateur.
Description des paramètres
Paramètres d’affichage
- Afficher le nuage de points dans le cadre sélectionné
-
Paramètre par défaut: repère du robot
Liste de valeurs: repère du robot, repère de la caméra
Instruction: Veuillez vous référer à Afficher le nuage de points dans le cadre sélectionné pour des instructions détaillées.
- Type de pose à visualiser
-
Paramètre par défaut: Après.
Options: Avant, Après et Tous.
Instruction: Veuillez vous référer à Afficher le nuage de points dans le cadre sélectionné pour des instructions détaillées.
Paramètres de la direction de translation
- Distance de translation
-
Valeur par défaut: 0
Instruction: Définissez le paramètre selon la situation réelle.
- Source de la direction de translation
-
Paramètre par défaut: CustomizedDirection (translation le long de la direction personnalisée).
Liste de valeurs: CustomizedDirection, ObjectAxis
-
CustomizedDirection: Translation le long de la direction personnalisée (valeurs X/Y/Z), où la direction de référence se trouve dans le repère de la pose à déplacer.
-
ObjectAxis: Translater l’objet le long d’un axe spécifié. Veuillez sélectionner un axe spécifié selon la situation réelle.
Instruction: Définissez le paramètre selon la situation réelle.
-
Exemples
-
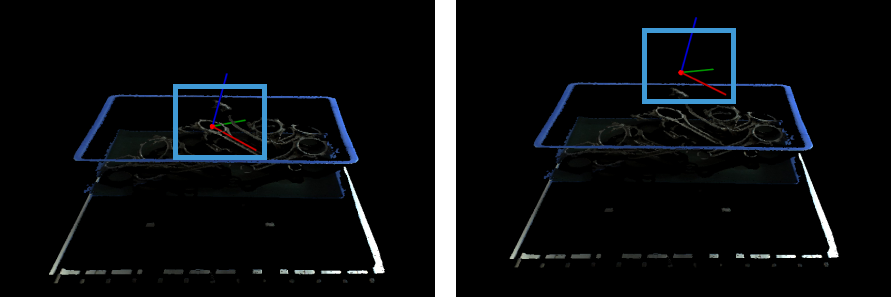
La figure ci-dessous montre la pose avant et après avoir été translatée de 0.03 mm le long de l’axe X du repère de l’objet. Dans cet exemple, ObjectAxis est sélectionné comme source de la direction de translation ; l’axe spécifié est l’axe X ; et la distance de translation est définie à 0.03 mm.

-
La figure ci-dessous montre la pose avant et après avoir été translatée de 0.03 mm le long de l’axe Y du repère de l’objet. Dans cet exemple, ObjectAxis est sélectionné comme source de la direction de translation ; l’axe spécifié est l’axe Y ; et la distance de translation est définie à 0.03 mm.

-
La figure ci-dessous montre la pose avant et après avoir été translatée de 0.08 mm le long de l’axe Z du repère de l’objet. Dans cet exemple, ObjectAxis est sélectionné comme source de la direction de translation ; l’axe spécifié est l’axe Z ; et la distance de translation est définie à 0.08 mm.
-
Lorsque CustomizedDirection est sélectionné comme source de la direction de translation, vous devrez définir les valeurs de X, Y et Z dans CustomizedDirection. Comme illustré dans la figure ci-dessous, le chemin de l’origine O vers A (X, Y, Z) constitue la direction de la translation de la pose.
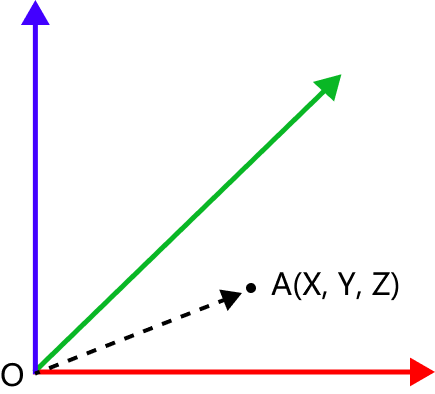
Comme montré ci-dessous, dans cet exemple, les valeurs de X, Y et Z sont toutes définies à 5, et la distance de translation est définie à 0.08 mm. La figure montre la pose avant (à gauche) et après (à droite) une translation de 0.08 mm le long de la direction personnalisée.
