Générer une stratégie de préhension pour l’objet cible
Fonction
Cette Étape génère la stratégie de préhension pour l’objet cible sur la base des points de préhension,points centraux de l’objet, et autres données produites par les Étapes précédentes.
Scénario d’utilisation
Cette Étape est généralement utilisée pour générer une stratégie de préhension pour l’objet cible. Cette Étape suit généralement l’Étape Ajuster les poses V2 et est suivie de l’Étape Sortie.
Entrée et sortie
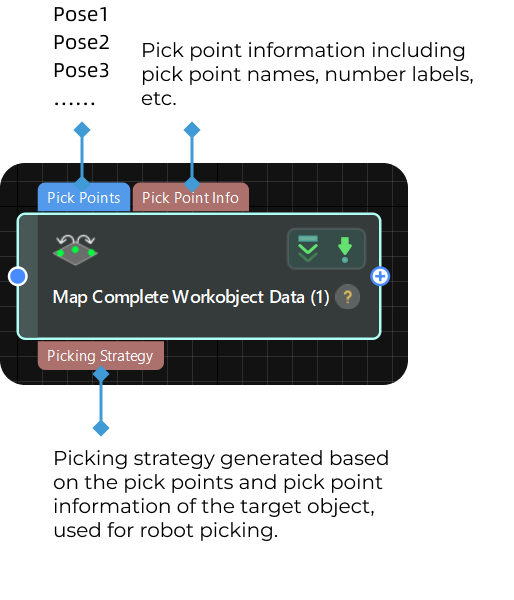
|
Lorsque l’objet cible est enregistré à l’aide du workflow « Aucun modèle de nuage de points requis » dans l’éditeur d’objet cible, le point de préhension doit être saisi directement, et l’Étape produira le même point de préhension que celui saisi. |
Description des paramètres
- Méthode de conversion des données
-
Description: Sélectionnez une méthode pour convertir le résultat de reconnaissance vers le type de données requis pour la préhension.
Liste de valeurs: Générer une stratégie de préhension basée sur des points de préhension, Générer une stratégie de préhension basée sur le point central de l’objet, Générer un point de préhension basé sur le point central de l’objet
-
Générer une stratégie de préhension basée sur des points de préhension: L’Étape génère une stratégie de préhension basée sur les points de préhension saisis et les informations du point de préhension. Si les dimensions des objets cibles à prélever peuvent changer, sélectionnez le paramètre Saisir dynamiquement les dimensions de l’objet cible.
-
Générer une stratégie de préhension basée sur le point central de l’objet: L’Étape génère une stratégie de préhension basée sur le point central de l’objet saisi et le nom de l’objet cible. Si les dimensions des objets cibles à prélever peuvent changer, sélectionnez le paramètre Saisir dynamiquement les dimensions de l’objet cible.
-
Générer un point de préhension basé sur le point central de l’objet: L’Étape génère le point de préhension et les informations du point de préhension sur la base du point central de l’objet saisi et du nom de l’objet cible. Si vous devez produire des données supplémentaires, sélectionnez Informations du point de préhension ou Étiquette numérique du point de préhension dans le menu déroulant de Données supplémentaires à produire.
Valeur par défaut: Générer une stratégie de préhension basée sur des points de préhension
-
- Données supplémentaires à produire
-
Description: Sélectionnez les données supplémentaires à produire par cette Étape.
Liste de valeurs: Informations du point de préhension, Étiquette numérique du point de préhension
Valeur par défaut: Informations du point de préhension
- Objet cible sans modèle de nuage de points
-
Description: Sélectionnez un objet cible ne nécessitant pas de modèle de nuage de points, et cette Étape peut produire des informations de point de préhension pour l’objet cible. Si le port d’entrée « Noms d’objet cible » de l’Étape n’est pas connecté, ou est connecté mais aucun nom d’objet cible n’est obtenu, l’Étape l’obtiendra selon le paramètre « Objet cible sans modèle de nuage de points ».