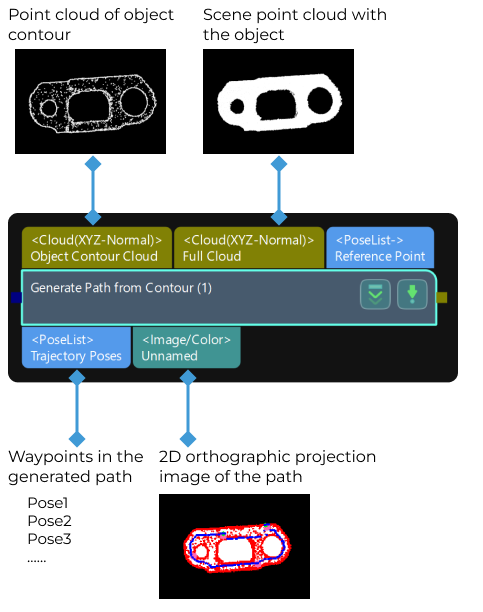
Générer une trajectoire à partir du contour
|
Si vous devez utiliser cette étape, cliquez sur Aide dans la barre de menus, sélectionnez À propos des plugins, et activez le plugin « step_trajectory » dans la fenêtre. |
Scénario d’utilisation
Cette étape est généralement utilisée dans des applications de collage sur les bords pour des objets tels que des trappes/vitres rectangulaires.
Dans le processus d’application réel, en raison de facteurs tels que l’angle de montage de la caméra et l’éclairage, les nuages de points peuvent manquer de parties nécessaires ou présenter un bruit excessif. Cela peut entraîner des changements ou des écarts du point de départ de la trajectoire générée, il est donc recommandé d’utiliser cette étape uniquement comme aide à la génération de trajectoire.
Pour des objets du même type, vous pouvez obtenir une trajectoire stable en suivant les étapes ci-dessous.
-
Utilisez le nuage de points de l’objet conjointement avec cette étape pour générer une trajectoire initiale, et ajustez les points de passage de la trajectoire.
-
Prenez le nuage de points de l’objet comme modèle de nuage de points, utilisez les points de passage ajustés comme plusieurs points de préhension pour le modèle de nuage de points, et définissez le point central de l’objet dans le modèle de nuage de points.
-
Effectuez une correspondance 3D sur l’objet en utilisant le modèle de nuage de points et le point central de l’objet, obtenez les points de préhension de l’objet, puis utilisez l’étape «Mapper vers plusieurs points de préhension» pour obtenir plusieurs points de préhension pour l’objet, qui constituent ensemble une trajectoire stable.
Description des paramètres
Cette étape comprend quatre groupes de paramètres, et leurs descriptions sont les suivantes :
-
Paramètres généraux: Ce groupe de paramètres est utilisé pour les réglages généraux. Veuillez ajuster les paramètres en fonction des besoins réels.
-
Lissage des points: Lorsque le nuage de points du bord de l’objet est irrégulier, vous pouvez avoir besoin d’ajuster ce groupe de paramètres pour rendre le nuage de points du bord plus lisse.
-
Érosion latérale spéciale: Ce groupe de paramètres est conçu pour des applications spéciales et n’a généralement pas besoin d’être ajusté.
-
Détection des coins: Lorsque des coins évidents sont présents sur le nuage de points du bord, vous devrez ajuster ce groupe de paramètres.
Paramètres généraux
- Taille du noyau de fermeture du masque
-
Description: Ce paramètre est utilisé pour définir la taille du noyau lorsqu’une opération de fermeture est appliquée au masque d’image. L’unité est le pixel.
Valeur par défaut: 5 px
- Taille d’échantillonnage des points
-
Description: Ce paramètre est utilisé pour spécifier l’intervalle entre les points de passage dans la trajectoire générée. L’unité est le pixel. Plus la valeur est grande, plus l’intervalle entre les points de passage est important. Veuillez vous référer à l’exemple de réglage pour le résultat d’application.
Valeur par défaut: 10 px
- Edge Zoom Type
-
Description: Ce paramètre est utilisé pour sélectionner la méthode permettant de générer une trajectoire à partir du nuage de points du bord.
Value list: ByErode, ByVertical
-
ByErode: Génère une trajectoire par opération d’érosion.
-
ByVertical: Génère une trajectoire en calculant les lignes verticales des lignes tangentes des points sur le nuage de points du bord.
Valeur par défaut: ByErode.
Recommandation de réglage: Il est recommandé de sélectionner ByErode.
-
- Erode Kernel Size
-
Description: Lorsque le Type de zoom du bord est défini sur ByErode, ce paramètre est utilisé pour déterminer la distance entre la trajectoire et le bord de l’objet, et pour savoir si la trajectoire est à l’intérieur ou à l’extérieur du bord de l’objet. L’unité est le pixel. Lorsque la valeur du paramètre est positive, la trajectoire générée sera à l’intérieur du bord de l’objet. Lorsque la valeur du paramètre est négative, la trajectoire générée sera à l’extérieur du bord de l’objet. Veuillez vous référer à l’exemple de réglage pour le résultat correspondant.
Valeur par défaut: 15 px
- Vertical Move Real Dis
-
Description: Lorsque le Type de zoom du bord est défini sur ByVertical, ce paramètre est utilisé pour déterminer la distance entre la trajectoire et le bord de l’objet, et pour savoir si la trajectoire est à l’intérieur ou à l’extérieur du bord de l’objet. L’unité est le millimètre. Lorsque la valeur du paramètre est positive, la trajectoire générée sera à l’intérieur du bord de l’objet. Lorsque la valeur du paramètre est négative, la trajectoire générée sera à l’extérieur du bord de l’objet. Veuillez vous référer à l’exemple de réglage pour le résultat correspondant.
Valeur par défaut: 8.000 mm
Lissage des points
- Utiliser le filtre gaussien
-
Description: Lorsque le nuage de points du bord est irrégulier, ce paramètre est utilisé pour déterminer s’il faut utiliser le filtre gaussien afin de rendre le nuage de points du bord plus lisse.
Default Value: Non sélectionné.
Recommandation de réglage: Veuillez sélectionner cette option en fonction du besoin réel.
- Rayon du filtre gaussien
-
Description: Ce paramètre est utilisé pour spécifier le rayon du filtre gaussien. L’unité est le pixel.
Valeur par défaut: 20 px
Recommandation de réglage: Il est recommandé d’utiliser la valeur par défaut.
- Sigma du filtre gaussien
-
Description: Ce paramètre est utilisé pour spécifier la valeur sigma du filtre gaussien.
Valeur par défaut: 5.0000
Recommandation de réglage: Il est recommandé d’utiliser la valeur par défaut.
Érosion latérale spéciale
Ce groupe de paramètres est conçu pour des applications spéciales et n’a généralement pas besoin d’être ajusté.
Détection des coins
- Taille d’échantillon pour les coins
-
Description: Ce paramètre est utilisé pour définir le coefficient du sous-échantillonnage sur le nuage de points du bord. L’unité est le pixel. Le sous-échantillonnage facilite la détection des points d’angle dans le nuage de points du bord.
Valeur par défaut: 3
- Niveau de qualité
-
Description: Ce paramètre est utilisé pour détecter les points d’angle du nuage de points du bord. Il garantit que les points de passage se trouvent dans les coins, quelle que soit la taille de l’intervalle entre les points de passage.
Valeur par défaut: 0.0100
Recommandation de réglage: Il est recommandé d’utiliser la valeur par défaut.
- Distance minimale
-
Description: Ce paramètre est utilisé pour spécifier la distance minimale (en pixels) entre les coins lors de la détection des points d’angle.
Valeur par défaut: 50.0000
- Nombre maximal de coins
-
Description: Ce paramètre est utilisé pour spécifier le nombre maximal de coins de l’objet.
Valeur par défaut: 4
- Taille du bloc
-
Description: Ce paramètre est utilisé pour spécifier la taille de la zone de détection. Lorsque les points d’angle ne sont pas suffisamment évidents ou que le nuage de points du bord est trop lisse, vous pouvez augmenter la valeur.
Valeur par défaut: 10
- Utiliser le détecteur de Harris
-
Description: Ce paramètre est utilisé pour déterminer s’il faut utiliser le détecteur de coins de Harris. Une fois cette option sélectionnée, vous devrez définir la valeur K.
Default Value: Non sélectionné.
Recommandation de réglage: En général, cette option n’a pas besoin d’être utilisée.
Exemples de réglage
Taille d’échantillonnage des points
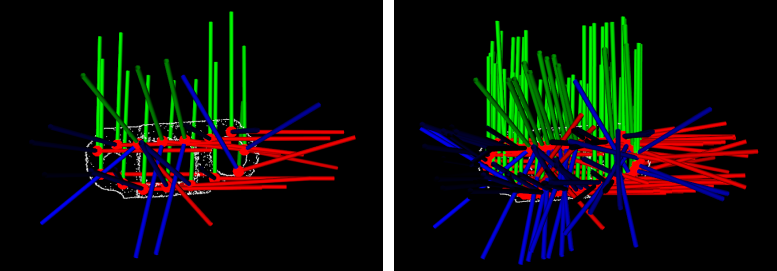
Lorsque Taille d’échantillonnage des points est définie à 20 et 5, respectivement, les points de passage de la trajectoire générée sont présentés ci-dessous.
Pour la figure de gauche, Taille d’échantillonnage des points est définie à 20, et les points de passage sont relativement clairsemés; pour la figure de droite, Taille d’échantillonnage des points est définie à 5, et les points de passage sont relativement denses.
Taille du noyau d’érosion
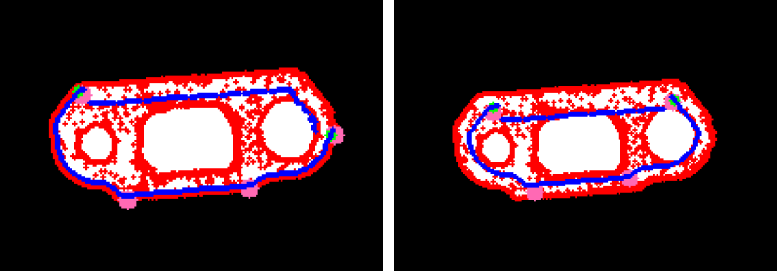
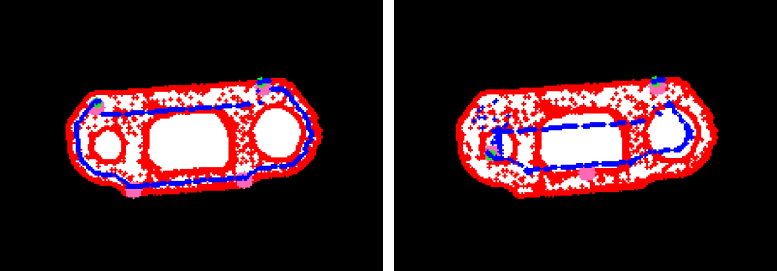
Lorsque Taille du noyau d’érosion est définie à 5 et 15, respectivement, les trajectoires générées sont présentées ci-dessous.
Pour la figure de gauche, Taille du noyau d’érosion est définie à 5; pour la figure de droite, Taille du noyau d’érosion est définie à 15. À mesure que la valeur positive augmente, la trajectoire générée se rétracte vers l’intérieur du bord de l’objet.
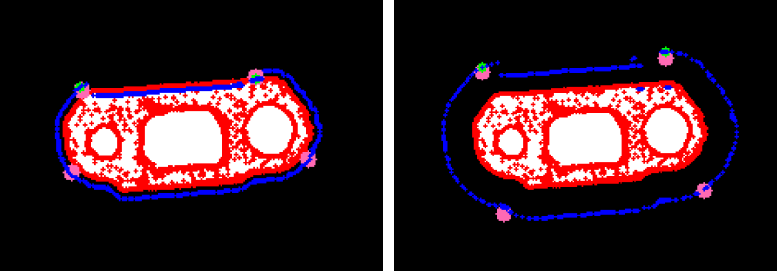
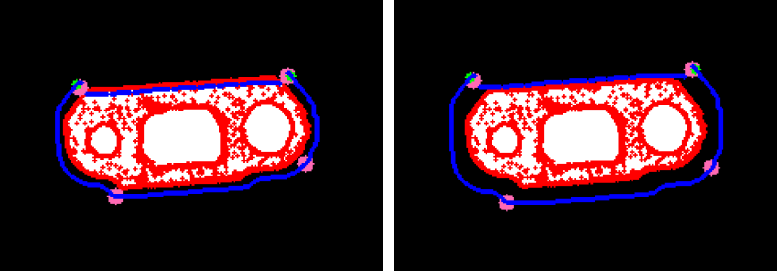
Lorsque Taille du noyau d’érosion est définie à −5 et −20, respectivement, les trajectoires générées sont présentées ci-dessous.
Pour la figure de gauche, Taille du noyau d’érosion est définie à −5; pour la figure de droite, Taille du noyau d’érosion est définie à −20. À mesure que la valeur négative diminue, la trajectoire générée s’étend vers l’extérieur du bord de l’objet.
Distance réelle de déplacement vertical
Lorsque Distance réelle de déplacement vertical est définie à 5 et 15, respectivement, les trajectoires générées sont présentées ci-dessous.
Pour la figure de gauche, Distance réelle de déplacement vertical est définie à 5; pour la figure de droite, Distance réelle de déplacement vertical est définie à 15. À mesure que la valeur du nombre positif augmente, la trajectoire générée se rétracte vers l’intérieur du bord de l’objet.
Lorsque Distance réelle de déplacement vertical est définie à −5 et −20, respectivement, les trajectoires générées sont présentées ci-dessous.
Pour la figure de gauche, Distance réelle de déplacement vertical est définie à −5; pour la figure de droite, Distance réelle de déplacement vertical est définie à −20. À mesure que la valeur négative diminue, la trajectoire générée s’étend vers l’extérieur du bord de l’objet.