Détection des collisions
Dans ce panneau fonctionnel, vous pouvez configurer la détection des collisions. Lors de la planification de trajectoire du robot, Mech-Viz met en évidence les zones où des collisions pourraient se produire dans la zone de simulation 3D et interrompt le projet afin d’éviter des collisions réelles.
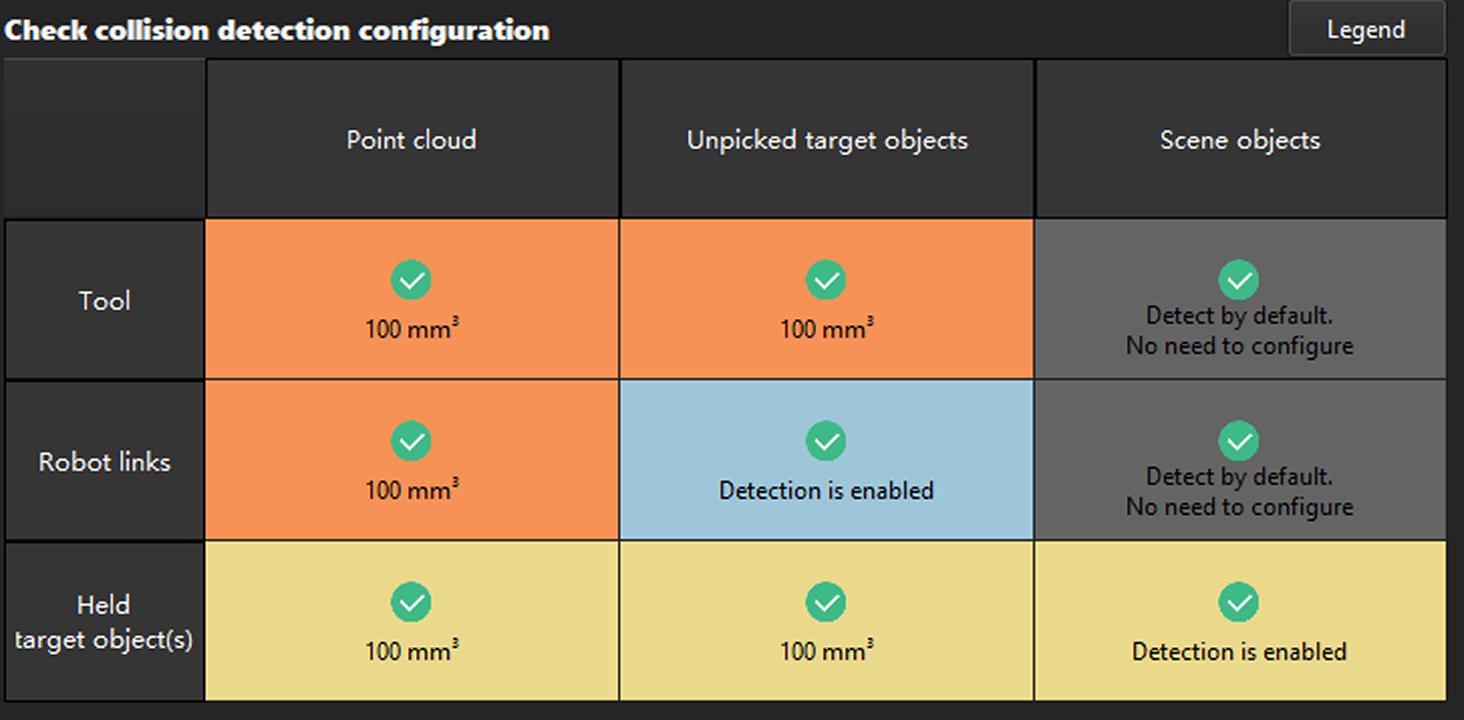
Ce tableau affiche dynamiquement la configuration de tous les types de détection de collisions. Cliquez sur Légende pour voir ce que représentent les différentes couleurs dans le tableau. Placez le curseur de la souris sur la cellule concernée pour savoir comment activer la détection de collision correspondante.
Pour plus d’instructions opérationnelles, veuillez consulter Configurer la détection des collisions.