Présentation de l’interface
Cette section présente l’interface utilisateur de l’outil de planification de trajectoire, y compris la barre de menus, la barre d’outils, l’arborescence des ressources du projet, la zone de simulation 3D et les panneaux fonctionnels.
Barre de menus
Barre d’outils
Option |
Description |
Simuler |
Exécuter le robot simulé |
Arrêter |
Arrêter l’exécution du robot simulé |
Pose initiale pour la planification |
Définir la pose initiale du robot pour la simulation |
Configuration des collisions |
Configurer les paramètres de détection de collision |
Éditeur de modèle |
Ouvrir l’éditeur de modèle |
Vitesse de simulation |
Définir la vitesse d’exécution du robot simulé |
Arborescence des ressources du projet
Le panneau Ressources fournit les interfaces pour le robot, les outils, les objets cibles (c’est-à-dire les objets à saisir ou à traiter), les objets de la scène, etc.
Robot
Cette entrée affiche le modèle de robot utilisé dans le projet en cours.
Cliquez sur le bouton ![]() à droite de Robot dans l’arborescence des ressources du projet pour ouvrir la bibliothèque de modèles de robots et changer de modèle de robot.
à droite de Robot dans l’arborescence des ressources du projet pour ouvrir la bibliothèque de modèles de robots et changer de modèle de robot.
Cliquez avec le bouton droit sur le nom du robot, et l’option suivante apparaîtra.
| Option | Description |
|---|---|
Ouvrir le dossier du modèle de robot |
Ouvrir le dossier où le fichier du modèle de robot est stocké. |
Recharger le robot |
Généralement utilisé après la modification du fichier de paramètres du modèle de robot local. Cliquez sur cette option pour mettre à jour le modèle de robot et ses paramètres dans le logiciel. |
Cliquez sur ![]() pour rendre le robot affiché semi‑transparent, et cliquez sur
pour rendre le robot affiché semi‑transparent, et cliquez sur ![]() pour revenir au réglage d’affichage original.
pour revenir au réglage d’affichage original.
Repères de référence
Cette entrée fournit l’interface pour afficher tous les repères de référence dans la zone de simulation 3D.
Cliquez sur ![]() pour afficher le repère de référence correspondant, et cliquez sur
pour afficher le repère de référence correspondant, et cliquez sur ![]() pour masquer le repère de référence.
Cliquez sur
pour masquer le repère de référence.
Cliquez sur ![]() pour activer ou désactiver la « translation » ou la « rotation » du manipulateur.
pour activer ou désactiver la « translation » ou la « rotation » du manipulateur.
Outils
Cette entrée fournit l’interface pour configurer les outils du projet. Veuillez consulter Outils pour savoir comment configurer les outils.
Cliquez sur + pour ouvrir la fenêtre de configuration des outils, où vous pouvez ajouter des outils.
L’outil par défaut est utilisé pour éviter des erreurs dues à des outils d’extrémité non configurés.
Cliquez avec le bouton droit sur le nom d’un outil configuré ; les options suivantes apparaîtront.
| Option | Description | Raccourci |
|---|---|---|
Copier |
Copier l’outil actuel. |
Ctrl + C |
Coller |
Coller l’outil actuel. |
Ctrl + V |
Supprimer |
Supprimer l’outil actuel. |
Suppr |
Renommer |
Renommer l’outil actuel. |
Aucun |
Configuration de l’outil |
Ouvrir la fenêtre de configuration de l’outil pour l’outil actuel. |
Aucun |
Définir comme outil actif |
Définir l’outil actuel comme outil actif. |
Aucun |
Cliquez sur ![]() pour rendre le modèle de l’outil semi‑transparent, et cliquez sur
pour rendre le modèle de l’outil semi‑transparent, et cliquez sur ![]() pour revenir au réglage d’affichage original.
pour revenir au réglage d’affichage original.
Objets cibles
Cette entrée fournit l’interface pour configurer les objets cibles du projet. Veuillez consulter Objet cible pour savoir comment configurer les objets cibles.
Cliquez sur ![]() à droite de objet cible dans l’arborescence des ressources du projet pour ouvrir l’éditeur d’objet cible pour la configuration.
à droite de objet cible dans l’arborescence des ressources du projet pour ouvrir l’éditeur d’objet cible pour la configuration.
Double-cliquez sur le bouton ![]() à gauche de objet cible, et vous pouvez afficher les points de préhension d’un objet cible. Double-cliquez sur le nom de l’objet cible pour entrer directement dans la fenêtre de l’éditeur d’objet cible afin de modifier et ajuster l’objet cible ; double-cliquez sur le nom du point de préhension, et vous pouvez afficher et ajuster les points de préhension.
à gauche de objet cible, et vous pouvez afficher les points de préhension d’un objet cible. Double-cliquez sur le nom de l’objet cible pour entrer directement dans la fenêtre de l’éditeur d’objet cible afin de modifier et ajuster l’objet cible ; double-cliquez sur le nom du point de préhension, et vous pouvez afficher et ajuster les points de préhension.
Sol
Cette entrée fournit l’interface pour modifier la hauteur du sol et le réglage d’affichage du sol.
Cliquez avec le bouton droit sur le sol et vous pouvez en modifier la hauteur dans la fenêtre contextuelle.
Cliquez sur ![]() pour masquer le sol et cliquez sur
pour masquer le sol et cliquez sur ![]() pour restaurer.
pour restaurer.
Objets de scène
Cette entrée fournit l’interface pour configurer les objets de scène du projet. Veuillez consulter Objets de scène pour savoir comment configurer les objets de scène.
Cliquez sur + pour ouvrir une fenêtre de configuration des objets de scène, où vous pouvez ajouter des objets de scène.
Cliquez avec le bouton droit sur le nom d’un objet de scène configuré ; les options suivantes apparaîtront.
| Option | Description | Raccourci |
|---|---|---|
Copier |
Copier l’objet de scène actuel. |
Ctrl + C |
Coller |
Coller l’objet de scène. |
Ctrl + V |
Couper |
Couper l’objet de scène actuel. |
Ctrl + X |
Supprimer |
Supprimer l’objet de scène actuel. |
Suppr |
Renommer |
Renommer l’objet de scène actuel. |
Aucun |
Configuration de l’objet de scène |
Ouvrir la fenêtre de configuration de l’objet de scène pour l’objet cible actuel. |
Aucun |
Cliquez sur ![]() pour rendre l’objet de scène semi‑transparent ; cliquez sur
pour rendre l’objet de scène semi‑transparent ; cliquez sur ![]() pour rendre l’objet de scène transparent ; et
pour rendre l’objet de scène transparent ; et ![]() pour revenir au réglage d’affichage original.
pour revenir au réglage d’affichage original.
Vous pouvez également faire glisser et déposer le nom de l’objet de scène dans le panneau Ressources pour faire du modèle d’objet de scène un modèle enfant ou un modèle individuel.
Bibliothèque de modèles
Cette entrée fournit l’interface pour importer des modèles personnalisés dans le projet. Tous les modèles personnalisés importés seront affichés dans la bibliothèque de modèles, et les modèles seront catégorisés selon leurs formats.
Cliquez sur + pour ouvrir la fenêtre de sélection de fichier afin d’importer un modèle personnalisé.
Cliquez avec le bouton droit sur le modèle personnalisé importé ; les options suivantes apparaîtront.
| Option | Description | Raccourci |
|---|---|---|
Copier |
Copier le modèle actuel. |
Ctrl + C |
Coller |
Coller le modèle copié. |
Ctrl + V |
Supprimer |
Supprimer le modèle actuel. |
Suppr |
Configuration du modèle |
Ouvrir la fenêtre de configuration du modèle pour le modèle actuel. |
Aucun |
Éditeur de modèle |
Ouvrir l’éditeur de modèle et le modèle actuel sera utilisé comme modèle de référence. |
Aucun |
Ouvrir le dossier |
Ouvrir le dossier où le fichier du modèle est stocké. |
Aucun |
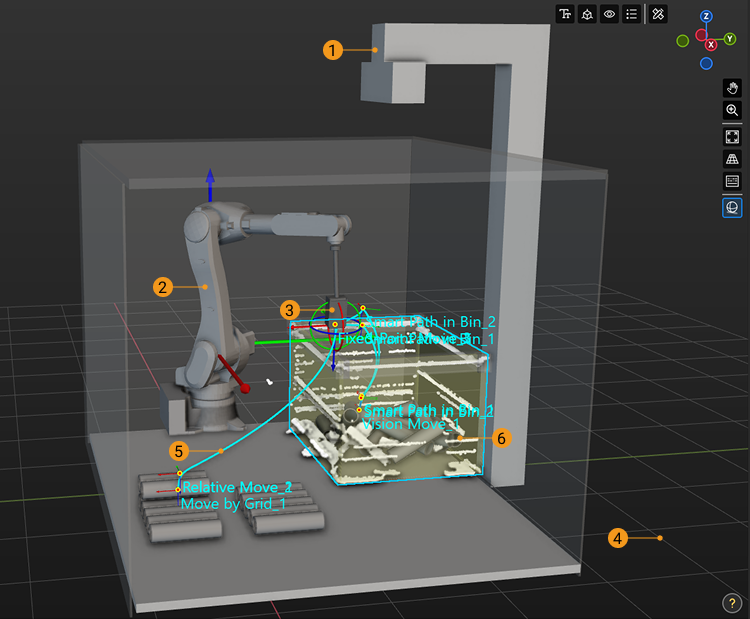
Zone de simulation 3D
Le robot, les objets de scène, les outils, les modèles des objets cibles, la trajectoire de mouvement du robot, les points de préhension et les collisions seront affichés dans la zone de simulation 3D. Vous pouvez également faire glisser pour déplacer les modèles des objets de scène dans cette zone.
N° |
Description |
1 |
Objets de scène |
2 |
Robot |
3 |
Outils |
4 |
Sol |
5 |
Trajectoire planifiée |
La zone de simulation 3D peut afficher la trajectoire de mouvement à la fois du robot réel en application et du robot simulé dans la simulation de projet.
|
|
6 |
Résultat de vision |
Le résultat de vision renvoyé par le service de vision sera affiché dans la zone de simulation 3D.
|
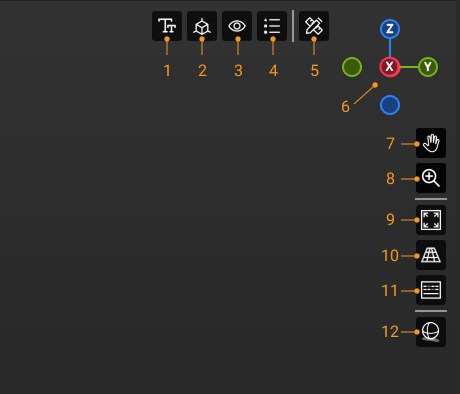
Présentation des composants
N° |
Description |
1 |
Cliquez sur cette icône pour afficher le menu montrant la taille de police et la taille des axes. |
2 |
Cliquez sur cette icône pour afficher le menu montrant la visibilité des repères de référence. |
3 |
Cliquez sur cette icône pour afficher le menu montrant la visibilité des composants dans les résultats de vision. |
4 |
Cliquez sur cette icône pour afficher le menu montrant la légende des couleurs des poses de vision. Pour des informations sur l’état des poses correspondant aux différentes légendes de couleurs, veuillez vous reporter à Détails sur l’état des poses. |
5 |
Cliquez sur cette icône pour activer la fonction de mesure. Pour les instructions d’utilisation, reportez-vous à Mode de mesure. |
6 |
Le gizmo de navigation affiche la vue actuelle dans l’espace de travail. |
Cliquez sur l’icône de chaque axe (X, Y, Z, -X, -Y, -Z) pour aligner la vue sur l’axe. Maintenez le bouton gauche de la souris enfoncé et faites glisser le gizmo de navigation pour faire pivoter la vue. |
|
7 |
Panoramique de la vue |
Maintenez cette icône enfoncée (ou Maj + Molette de la souris), puis faites glisser l’icône pour déplacer la vue. |
|
8 |
Zoom avant/arrière |
Maintenez cette icône enfoncée, puis faites-la glisser vers le haut (ou faites défiler la molette de la souris vers l’avant) pour effectuer un zoom avant, ou faites-la glisser vers le bas (ou faites défiler la molette de la souris vers l’arrière) pour effectuer un zoom arrière. |
|
9 |
Adapter la vue |
10 |
Cliquez sur cette icône pour basculer vers la vue en perspective/orthographique. |
11 |
Afficher les touches du clavier et les boutons de la souris enfoncés |
Une fois cette icône sélectionnée (mise en évidence en bleu), les touches de clavier et les boutons de souris que vous avez enfoncés seront affichés dans le coin inférieur droit de la zone de simulation 3D. |
|
12 |
Cliquez sur cette icône pour afficher l’occlusion ambiante du modèle 3D, afin d’améliorer l’effet 3D de la simulation. |
Panneaux fonctionnels
Les panneaux fonctionnels comprennent Flux de travail, Robot, Historique de planification et Journal.
Flux de travail
Vous pouvez configurer le flux de travail dans ce panneau.
-
Cliquez sur Ajouter pour créer un nouveau flux de travail.
-
Cliquez sur Supprimer pour supprimer le flux de travail.
-
Cliquez sur Renommer pour modifier le nom du flux de travail actuel.
-
Cliquez sur
 pour changer de flux de travail.
pour changer de flux de travail. -
Sélectionnez une étape, et ses paramètres seront affichés dans le panneau de droite.
-
Déplacez le curseur de la souris sur la ligne reliant les étapes, puis cliquez sur
 pour insérer une étape.
pour insérer une étape. -
Double-cliquez sur le nom de l’étape pour le modifier. (Le nom de Global Configuration ne peut pas être modifié.)
Robot
Vous pouvez définir les positions articulaires, le TCP et la position d’origine du robot dans ce panneau.
Historique de planification
Dans ce panneau, vous pouvez consulter en détail l’historique des plans de Mech-Viz. Vous pouvez également utiliser l’historique des plans pour diagnostiquer des problèmes et améliorer la logique du projet. Pour plus de détails, veuillez vous référer à Historique des plans.
Ce panneau fonctionnel affiche des paramètres liés à l’historique des plans.
Option |
Description |
Durée totale d’exécution |
Le temps écoulé depuis le démarrage de l’exécution/simulation du projet jusqu’à son arrêt. |
Durée totale de planification |
Le temps total écoulé consacré à la planification de trajectoire. |
Cliquer pour afficher les détails de l’objet cible/du point de préhension |
Une fois activée, si des résultats de vision correspondants existent, la sélection d’un objet cible ou d’un point de préhension pour interroger l’historique des plans, ou le clic sur une entrée de l’historique des plans, ouvrira une fenêtre contextuelle affichant les détails du point de préhension ou de l’objet cible. |
Cliquer pour zoomer sur les détails de collision |
Une fois activée, le clic sur une entrée de l’historique des plans ayant échoué en raison d’une collision ajustera automatiquement la vue dans la zone de simulation 3D, en centrant la vue sur les deux objets en collision. |
Durée minimale de l’animation |
Lors de la sélection d’une entrée de l’historique des plans, l’animation correspondante de la trajectoire complète sera lue, et ce paramètre spécifie la durée minimale de lecture de l’animation par la suite. |
Effacer l’historique des plans |
Efface tout l’historique des plans actuellement affiché dans le panneau. |
Importer |
Charger des fichiers d’historique des plans depuis le répertoire spécifié. |
Exporter |
Exporter tout l’historique des plans actuel vers un répertoire spécifié. |
Ouvrir le dossier d’historique des plans |
Ouvrir le dossier par défaut qui stocke l’historique des plans. |
En cliquant avec le bouton droit sur une entrée de l’historique des plans, vous pouvez voir les options suivantes :
Option |
Description |
Raccourci |
Copier |
Copier le contenu sélectionné. |
Ctrl + C |
Tout réduire |
Réduit tous les sous-nœuds dans le panneau et n’affiche que les nœuds parents. |
N/A |
Supprimer l’entrée d’historique des plans sélectionnée |
Supprimer l’élément d’historique des plans sélectionné. |
N/A |
Journal
Dans le panneau du journal, vous pouvez consulter en détail le journal du logiciel et gérer les paramètres du journal en bas du panneau.
En cas de problème lors de l’utilisation du logiciel, vous pouvez consulter les journaux. Vous pouvez également exporter le journal et l’envoyer au Support technique pour faciliter le processus de dépannage.
|
Cliquez sur une entrée du journal et appuyez sur Ctrl+C, et l’entrée sera copiée dans votre presse-papiers. |
Option |
Description |
D: Débogage |
Filtrer les journaux à afficher en fonction de leur niveau. Les journaux des niveaux sélectionnés seront affichés. Vous pouvez sélectionner plusieurs niveaux. |
i: Info |
|
W: Avertissement |
|
E: Erreur |
|
Effacer |
Effacer tous les messages du journal sur la page. |
Exporter |
Exporter les messages du journal vers un fichier HTML. Les fichiers exportés se trouvent dans le dossier logs du répertoire d’installation de Mech-Viz. |
Ouvrir le dossier |
Cliquez pour ouvrir le dossier logs dans le répertoire d’installation de Mech-Viz. Le dossier logs contient des fichiers journaux enregistrés par date. |