Exécuter l’action d’outil
Description de la fonction
Exécute l’action d’outil sélectionnée en fonction de l’outil utilisé dans cette étape.
Scénario d’utilisation
Il est généralement utilisé avec l’étape Changer d’outil dont le Mode de fonctionnement est défini sur Bascule automatique vers l’outil approprié pour exécuter l’action d’outil correspondante.

Description des paramètres
Paramétrage de la communication
Sélectionnez l’objet de transmission des données. Si la solution utilise le mode de communication Master-Control, sélectionnez Envoyer au robot. Si la solution utilise le mode de communication Adapter, sélectionnez Envoyer à l’adaptateur.
Configurer l’action d’outil
Cliquez sur le bouton Configurer l’action d’outil dans le panneau inférieur des paramètres pour ouvrir le configurateur d’actions d’outil.
-
Sélectionnez l’outil que vous souhaitez configurer dans la liste Outils standard à gauche, puis cliquez sur le bouton Ajouter en haut à droite.
-
Saisissez le Nom de l’action d’outil dans la fenêtre contextuelle et cliquez sur OK pour ajouter une nouvelle action d’outil.
-
Cliquez sur le bouton + dans le bloc d’action d’outil correspondant pour configurer un DO pour l’action d’outil. Pour supprimer un DO, sélectionnez la ligne correspondante et cliquez sur le bouton - dans le bloc d’action d’outil.
-
Pour supprimer une action spécifique, cliquez sur le bouton
 dans le bloc d’action d’outil correspondant.
dans le bloc d’action d’outil correspondant. -
Pour renommer une action d’outil, cliquez sur le bouton
 dans le bloc d’action d’outil correspondant, puis saisissez le nouveau nom de l’action d’outil dans la fenêtre contextuelle.
dans le bloc d’action d’outil correspondant, puis saisissez le nouveau nom de l’action d’outil dans la fenêtre contextuelle.
|
Lors de l’exécution d’une action d’outil, les DO seront envoyés dans l’ordre de la liste des ports. 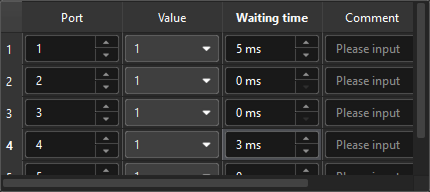
Lors de l’utilisation de la communication Master-Control, si le temps d’attente pour un certain port n’est pas nul, le logiciel attendra la durée spécifiée après l’envoi du DO du port actuel avant d’envoyer le DO du port suivant. Par exemple, dans l’image ci-dessus, après l’envoi de la valeur DO du port 1, le logiciel attend 5 ms, puis envoie séquentiellement les valeurs DO des ports 2 et 3. Après l’envoi de la valeur DO du port 4, le logiciel attend 3 ms puis envoie la valeur DO du port 5. Lors de l’utilisation de la communication Standard Interface, si le temps d’attente est nul, le DO de ce port sera d’abord placé dans la file d’attente et il sera envoyé avec les DO suivants lorsque le temps d’attente du port suivant n’est pas nul. Par exemple, dans l’image ci-dessus, après l’envoi de la valeur DO du port 1, le logiciel attend 5 ms. Ensuite, les valeurs DO des ports 2, 3 et 4 seront envoyées ensemble. Après l’envoi de toutes les valeurs DO accumulées, le logiciel attend 3 ms. |
Exemple d’application
Une fois la configuration terminée, vous pouvez sélectionner les actions à exécuter pour chaque outil dans le panneau inférieur des paramètres.
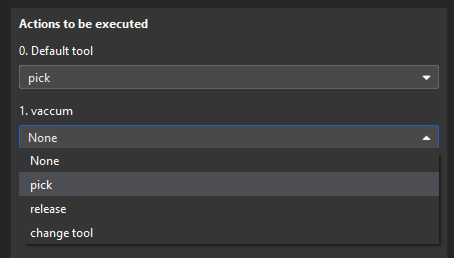
Vous pouvez consulter le projet d’exemple Commutation automatique d’outil pour plus d’informations.