Ajuster les poses avec les options d’ajustement de pose (mode personnalisé)
Cette section présente comment ajuster des poses à l’aide des options d’ajustement de pose en mode personnalisé.
|
Une seule option d’ajustement de pose peut être ajoutée à la fois. Cependant, vous pouvez ajouter des options d’ajustement de pose en double. |
Retourner la pose et minimiser l’angle entre l’axe d’inversion et la direction cible
Fonction
Cette option tente de faire pivoter la pose de 180° autour de l’axe fixé et calcule les angles entre l’axe d’inversion et la direction cible. Le résultat dont l’angle est minimal sera sélectionné. Cette option est généralement utilisée pour traiter des résultats d’appariement.
Instructions d’utilisation
Axe à fixer
Lors de l’inversion de la pose, ce paramètre est utilisé pour définir l’axe devant être fixé. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Axe à inverser
Lors de l’inversion de la pose, ce paramètre est utilisé pour définir l’axe devant être inversé. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Définir la direction cible
Il existe trois méthodes pour définir la direction cible, à savoir, Utiliser le repère du robot, Déplacer avec le manipulateur de pose et Entrée depuis une Étape externe, comme expliqué dans le tableau ci-dessous.
N° |
Méthode |
Description |
Instructions |
Illustration |
1 |
Utiliser le repère du robot |
Spécifiez la direction d’un axe dans le repère du robot comme direction cible. |
|
|
2 |
Déplacer avec le manipulateur de pose |
Ajustez la position et l’orientation du manipulateur pour définir la direction cible. |
|
|
3 |
Entrée depuis une Étape externe |
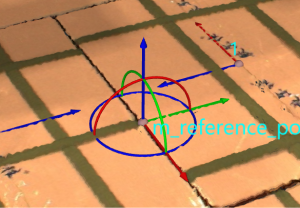
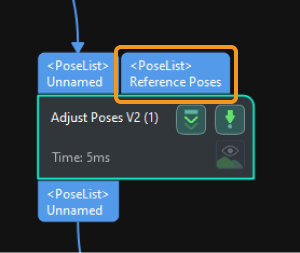
Saisissez une pose de référence depuis d’autres Étapes. |
|
|
Faire pivoter la pose et minimiser l’angle entre l’axe de rotation et la direction cible
Fonction
Selon la symétrie de rotation définie, cette option tente de faire pivoter la pose autour de l’axe fixé et calcule les angles entre l’axe de rotation et la direction cible. Le résultat dont l’angle est minimal sera sélectionné.
Instructions d’utilisation
Axe à fixer
Lors de la rotation de la pose, ce paramètre est utilisé pour définir l’axe devant être fixé. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Axe à faire pivoter
Lors de la rotation de la pose, ce paramètre est utilisé pour définir l’axe devant être pivoté. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Incrément d’angle de rotation
Ce paramètre est utilisé pour spécifier l’incrément d’angle lors de la rotation des poses. Le logiciel tentera de faire pivoter les poses par Incrément d’angle de rotations.
Définir la direction cible
Il existe trois méthodes pour définir la direction cible, à savoir, Utiliser le repère du robot, Déplacer avec le manipulateur de pose et Entrée depuis une Étape externe, comme expliqué dans le tableau ci-dessous.
N° |
Méthode |
Description |
Instructions |
Illustration |
1 |
Utiliser le repère du robot |
Spécifiez la direction d’un axe dans le repère du robot comme direction cible. |
|
|
2 |
Déplacer avec le manipulateur de pose |
Ajustez la position et l’orientation du manipulateur pour définir la direction cible. |
|
|
3 |
Entrée depuis une Étape externe |
Saisissez une pose de référence depuis d’autres Étapes. |
|
|
Faire pivoter l’axe de la pose vers la direction cible
Fonction
En l’absence de contrainte de symétrie, cette option oriente l’axe de rotation de la pose vers la direction cible. Cette option est généralement utilisée pour faire coïncider l’axe Z de la pose avec l’axe Z du repère du robot.
Instructions d’utilisation
Axe à fixer
Lors de la rotation de la pose, ce paramètre est utilisé pour définir l’axe devant être fixé. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Axe à faire pivoter
Lors de la rotation de la pose, ce paramètre est utilisé pour définir l’axe devant être pivoté. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Définir la direction cible
Il existe trois méthodes pour définir la direction cible, à savoir, Utiliser le repère du robot, Déplacer avec le manipulateur de pose et Entrée depuis une Étape externe, comme expliqué dans le tableau ci-dessous.
N° |
Méthode |
Description |
Instructions |
Illustration |
1 |
Utiliser le repère du robot |
Spécifiez la direction d’un axe dans le repère du robot comme direction cible. |
|
|
2 |
Déplacer avec le manipulateur de pose |
Ajustez la position et l’orientation du manipulateur pour définir la direction cible. |
|
|
3 |
Entrée depuis une Étape externe |
Saisissez une pose de référence depuis d’autres Étapes. |
|
|
Orienter l’axe de la pose vers la pose de référence
Fonction
Une fois l’axe fixe et l’axe d’orientation spécifiés, l’axe d’orientation de la pose actuelle peut pointer vers la pose de référence. Si l’axe fixe est défini sur « None », l’axe d’orientation peut pointer n’importe où.
Instructions d’utilisation
Définir la pose de référence
Il existe deux méthodes pour définir la pose de référence, à savoir, Déplacer avec le manipulateur de pose et Entrée depuis une Étape externe, comme expliqué dans le tableau ci-dessous.
N° |
Méthode |
Description |
Instructions |
Illustration |
1 |
Déplacer avec le manipulateur de pose |
Ajustez la position et l’orientation du manipulateur pour définir la pose de référence. |
|
|
2 |
Entrée depuis une Étape externe |
Saisissez une pose de référence depuis d’autres Étapes. |
|
|
Axe d’orientation
Ce paramètre est utilisé pour spécifier l’axe devant pointer vers la pose de référence. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Aligner l’orientation de la pose sur l’orientation de la pose cible
Fonction
Cette option remplace l’orientation de la pose actuelle par l’orientation de la pose cible.
Instructions d’utilisation
Définir la pose cible
Il existe deux méthodes pour définir la pose cible, à savoir, Déplacer avec le manipulateur de pose et Entrée depuis une Étape externe, comme expliqué dans le tableau ci-dessous.
N° |
Méthode |
Description |
Instructions |
Illustration |
1 |
Déplacer avec le manipulateur de pose |
Ajustez la position et l’orientation du manipulateur pour définir la pose de référence. |
|
|
2 |
Entrée depuis une Étape externe |
Saisissez une pose de référence depuis d’autres Étapes. |
|
|
Faire pivoter la pose autour d’un axe spécifié
Instructions d’utilisation
Spécifier l’axe de rotation
Ce paramètre est utilisé pour spécifier l’axe de rotation. Vous pouvez choisir entre Axe X, Axe Y et Axe Z selon les besoins réels.
Angle de rotation
Ce paramètre est utilisé pour sélectionner la méthode de saisie de l’angle de rotation de la pose, comme expliqué dans le tableau suivant.
N° |
Méthode |
Description |
Instructions |
1 |
Saisir manuellement |
Saisir manuellement l’angle de rotation de la pose. |
Saisissez l’angle de rotation de la pose selon les besoins réels. |
2 |
Entrée depuis une Étape externe |
Saisir l’angle de rotation depuis d’autres Étapes. |
|
Translater la pose selon une direction spécifiée
Instructions d’utilisation
Translater la pose dans/suivant
N° |
Repère de référence |
Axe |
1 |
Repère du robot |
Direction X positive, Direction X négative, Direction Y positive, Direction Y négative, Direction Z positive, Direction Z négative |
2 |
Repère de l’objet cible |
Axe X, Axe Y, Axe Z |
Distance de translation
Ce paramètre est utilisé pour sélectionner la méthode de saisie de la distance de translation de la pose, comme expliqué dans le tableau suivant.
N° |
Méthode |
Description |
Instructions |
1 |
Saisir manuellement |
Saisir manuellement la distance de translation de la pose. |
Saisissez la distance de translation de la pose selon les besoins réels. |
2 |
Entrée depuis une Étape externe |
Saisir la distance de translation depuis d’autres Étapes. |
|