Outil Caliper
Fonction
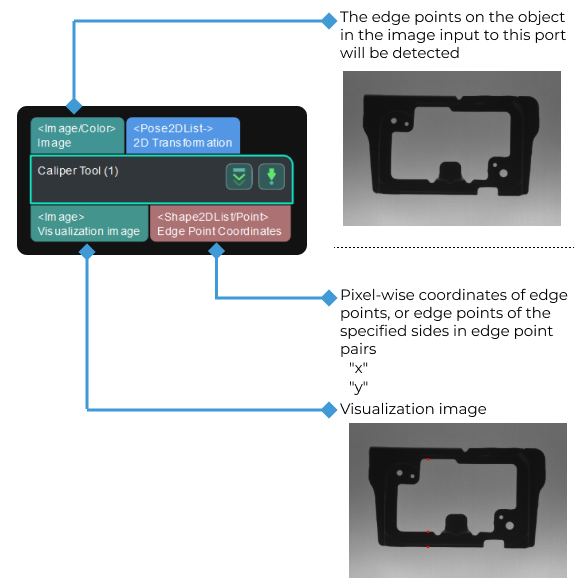
Cette Étape sert à détecter des points de bord ou des paires de points de bord le long de la direction verticale d’un ROI généralement allongé et à produire les coordonnées en pixels des points de bord ainsi que les distances des paires de points de bord (en cas de détection de paires).
Scénario d’utilisation
Cette Étape permet de mesurer les largeurs de parties d’objet spécifiées ou de localiser des points de bord le long d’une ligne sur un objet. Cette Étape est généralement suivie de l’Étape Convertir des longueurs en pixels en valeurs physiques pour obtenir les valeurs de largeur physiques.
Description des paramètres
- ROI
-
Description : Ce paramètre spécifie un ROI qui inclut les points de bord ou les paires de points de bord, et un cadre allongé pour la détection de bords sera généré.
Recommandation de réglage : Vous devez sélectionner un ROI en mode de mesure, veuillez vous référer à Mesurer des cercles pour des instructions détaillées. Lorsque la qualité d’image est bonne, vous pouvez régler la Largeur du ROI à 1 et ajuster la Hauteur pour couvrir la zone à détecter.
- Position and Orientation Correction
-
Description : Ce paramètre est utilisé pour ajuster le ROI à une position appropriée.
Remarques : Une fois ce paramètre sélectionné, l’Étape ajustera le ROI défini précédemment à une position appropriée selon les entrées « poses 2D ».
- Seuil inférieur de variation de niveau de gris
-
Description : Cette Étape sert à spécifier le seuil inférieur de la variation du niveau de gris du point dans la zone de détection. Si la variation de niveau de gris du point est supérieure à ce seuil, le point sera considéré comme un point de bord.
Valeur par défaut : 20
- Sigma du filtre gaussien
-
Description : Le filtre gaussien est utilisé pour supprimer le bruit de l’image. Ce paramètre permet de définir le coefficient du filtre le long de la direction verticale dans la zone de détection de bords.
Valeur par défaut : 1.0
Valeur recommandée : 1.0
Recommandation de réglage : Si la qualité d’image est bonne, vous pouvez conserver la valeur par défaut 1. Si la qualité d’image est faible, vous pouvez utiliser une valeur plus grande.
- Nombre maximal de résultats
-
Description : Ce paramètre spécifie le nombre maximal de points de bord ou de paires de points de bord produits par cette Étape.
Pour les points de bord, le point présentant une variation de niveau de gris plus importante sera prioritaire dans la sortie.
Pour les paires de points de bord, la paire dont la distance entre les deux points est la plus proche de la Distance attendue de la paire de points de bord sera prioritaire dans la sortie.
Valeur par défaut : 1
Recommandation de réglage : : Veuillez ajuster la valeur selon le besoin réel.
- Ordre de sortie
-
Description : Ce paramètre spécifie la façon dont les résultats de détection seront triés et produits.
Liste de valeurs : De haut en bas, De bas en haut, et Du centre vers les extrémités.
De haut en bas : Les points de bord plus proches du haut du ROI seront mieux classés dans la liste de sortie.
De bas en haut : Les points de bord plus proches du bas du ROI seront mieux classés dans la liste de sortie.
Du centre vers les extrémités : Les points de bord plus proches du centre du ROI seront mieux classés dans la liste de sortie.
Valeur par défaut : De haut en bas
- Mode de bord
-
Description : Ce paramètre spécifie le mode du bord à détecter.
Liste de valeurs : Bord unique et Paire de bords.
Bord unique : Détecte un seul bord et produit une liste de points de bord individuels.
Paire de bords : Détecte les bords des deux côtés et produit deux listes de points de bord respectives, qui représentent des paires de points de bord.
Valeur par défaut : Bord unique.
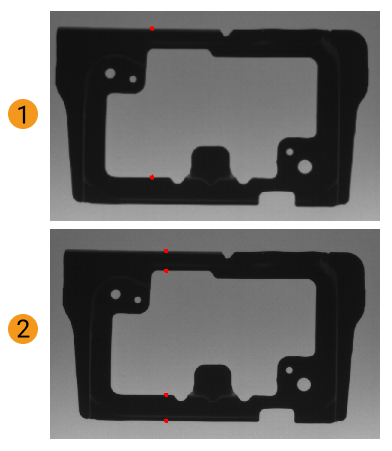
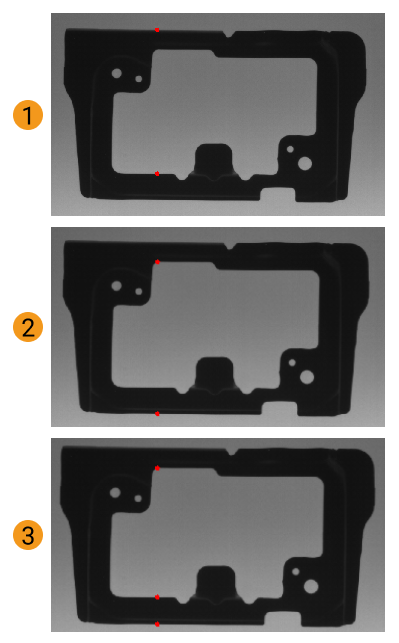
Remarques : Veuillez vous référer à exemples de réglage pour la sortie visualisée.
Lorsque le mode de bord est Paire de bords, vous devez définir tous les paramètres Type de transition de bord 0, Type de transition de bord 1 et Distance attendue de la paire de points de bord.
- Type de transition de bord 0
-
Description : Le type de transition de bord sert à spécifier quel type de bord, selon la variation de niveau de gris, sera considéré comme le bord de l’objet. Ce paramètre est utilisé pour détecter des points de bord uniques ou les points de bord d’un côté dans les paires.
Liste de valeurs : Blanc vers noir, Noir vers blanc, et Les deux.
Blanc vers noir : La position dans le ROI où le niveau de gris passe du blanc au noir sera considérée comme le point de bord de l’objet.
Noir vers blanc : La position dans le ROI où le niveau de gris passe du noir au blanc sera considérée comme le point de bord de l’objet.
Les deux : La position dans le ROI où le niveau de gris passe du noir au blanc ou du blanc au noir sera considérée comme le point de bord de l’objet.
La variation de niveau de gris désigne le changement de niveau de gris du haut vers le bas dans le ROI.
Valeur par défaut : Blanc vers noir
Remarques : Veuillez vous référer à exemples de réglage pour la sortie visualisée.
- Type de transition de bord 1
-
Description : Le type de transition de bord sert à spécifier quel type de bord, selon la variation de niveau de gris, sera considéré comme le bord de l’objet. Ce paramètre est utilisé pour détecter les points de bord de l’autre côté dans les paires. Vous devez définir ce paramètre lorsque le mode de bord est Paire de bords.
Liste de valeurs : Ce paramètre est identique à celui du Type de transition de bord 0.
- Distance attendue de la paire de points de bord
-
Description : Ce paramètre sert à spécifier la distance attendue, en pixels, entre deux points de bord d’une paire.
Valeur par défaut : 10
Remarques : La paire dont la distance entre deux points de bord est la plus proche de cette valeur sera prioritaire dans la sortie.
Une fois un Nombre maximal de résultats défini, les paires de points de bord de moindre priorité peuvent être ignorées.