Outil d’ajustement de pose
Fonction
L’outil d’ajustement de pose est utilisé pour améliorer l’ergonomie de l’ajustement des poses, permettre la visualisation des poses pendant l’ajustement et réduire le coût d’apprentissage de l’ajustement des poses. Les trois étapes Ajustement de pose, Règles de traitement et Paramètres généraux fournissent des paramètres liés à l’ajustement des poses, au tri des poses, au filtrage des poses, etc.

-
Ajustement de pose : pour translater des poses et ajuster l’orientation des poses.
-
Règles de traitement : trier les poses selon le besoin réel et filtrer les poses non admissibles.
-
Paramètres généraux : fournit des paramètres autres que ceux du traitement des poses. Actuellement, cette étape ne prend en charge que le tri d’autres données conjointement avec les poses correspondantes.
|
Après avoir effectué des opérations pertinentes dans l’outil d’ajustement de pose, n’effectuez pas d’opérations « Annuler/Rétablir » dans l’espace de travail de programmation graphique. |
Procédure d’utilisation
La procédure d’utilisation de cet outil est la suivante.
Ajustement de pose
Cette étape est utilisée pour translater des poses et ajuster l’orientation des poses. Voir ci-dessous pour plus de détails.
Sélectionner une stratégie de traitement des poses
Avant d’ajuster l’orientation et la position de la pose, veuillez d’abord sélectionner une stratégie de traitement des poses. Cliquez sur le bouton + à droite pour ajouter une stratégie de traitement des poses.
Une fois que vous avez terminé toutes les configurations ou souhaitez quitter l’outil, cliquez sur Enregistrer dans la fenêtre « Paramètres généraux » pour enregistrer toutes les configurations dans la stratégie de traitement des poses sélectionnée.
|
Lorsque plusieurs étapes « Ajuster les poses V2 » existent dans le projet et que la même « Stratégie de traitement des poses » est utilisée, si la « Stratégie de traitement des poses » utilisée par une étape est modifiée, celle utilisée par les autres étapes ne change pas. |
Paramètres du repère de référence
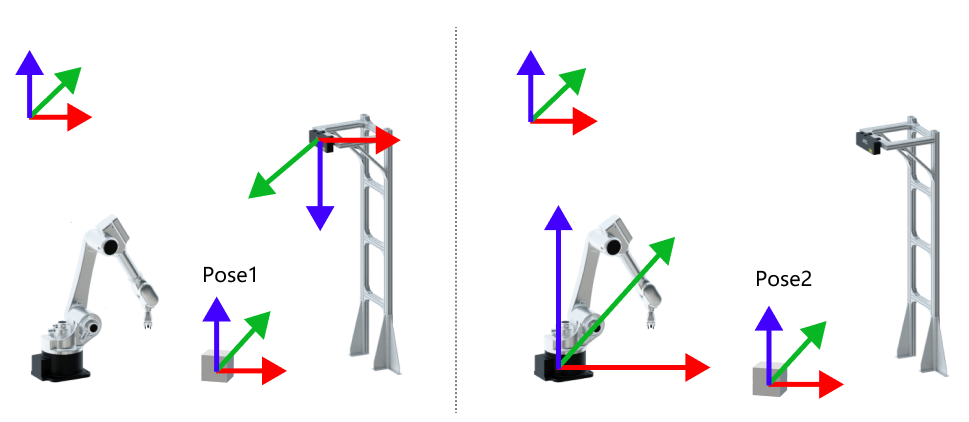
Ce paramètre est utilisé pour transformer les poses du repère de la caméra vers le repère du robot. Une fois Transformer la pose vers le repère du robot activé, des poses dans le repère du robot peuvent être produites.
Comme illustré ci-dessous, la figure de gauche montre la pose dans le repère de la caméra et la figure de droite montre la pose dans le repère du robot.
Ajustement de pose
Vous pouvez ajuster l’orientation et la position des poses dans cette section. Deux modes, Mode personnalisé et Mode prédéfini, sont disponibles. Si le mode personnalisé n’est pas activé, l’outil reste en mode prédéfini.
-
Si vous souhaitez ajuster l’orientation ou la position des poses avec les options prédéfinies, vous pouvez rester dans le mode prédéfini par défaut.
-
Si vous souhaitez effectuer des ajustements plus complexes de l’orientation ou de la position des poses, vous pouvez activer le mode personnalisé.
Mode prédéfini
En mode prédéfini, les options prédéfinies peuvent être utilisées pour effectuer de simples ajustements de la position et de l’orientation des poses.
-
Orientation
Sélectionnez l’option d’ajustement de l’orientation en fonction du besoin réel, y compris Alignement automatique, Orienter vers la pose de référence, Orienter vers/à l’opposé du centre de la palette (dépalettisation). Reportez-vous à Ajuster l’orientation de la pose (mode prédéfini) pour des instructions détaillées.
-
Translation de la pose
Cliquez sur le bouton + à droite pour ajouter une option de translation. Une seule option de translation, « Translater la pose le long d’une direction spécifiée », est disponible en mode prédéfini. Reportez-vous à Translater des poses (mode prédéfini) pour des instructions détaillées.
Mode personnalisé
Une fois le mode personnalisé activé, vous pouvez cliquer sur le bouton + à droite pour ajouter les options d’ajustement de pose suivantes. Veuillez cliquer sur les liens ci-dessous pour consulter les instructions détaillées.
Règles de traitement
Trier les poses selon le besoin réel et filtrer les poses non admissibles.
Filtrer les poses
Deux options de filtrage des poses, Filtrer par angle et Exclure les poses en dehors du ROI, sont proposées. Veuillez vous référer à Filtrer les poses via des options prédéfinies pour des instructions détaillées.
Paramètres généraux
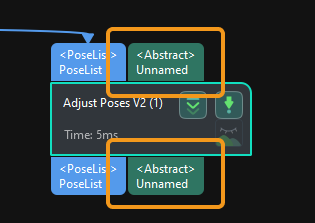
Une fois le nombre de nouveaux ports spécifié, des ports d’entrée compatibles avec tous les types de données seront ajoutés à l’étape « Ajuster les poses V2 ». Vous pouvez ensuite connecter le port qui émet les données à trier au nouveau port d’entrée ajouté.
|
Jusqu’à 5 nouveaux ports peuvent être ajoutés. |
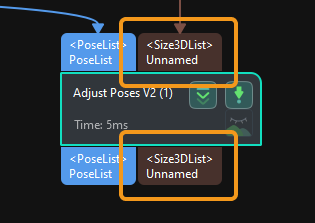
Par exemple, lorsque Définir le nombre de nouveaux ports est 1, un nouveau port compatible avec tous les types de données est ajouté, comme illustré ci-dessous.
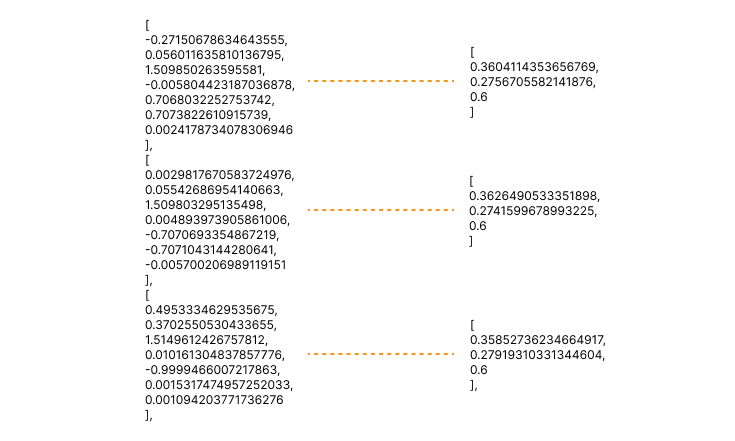
Si vous souhaitez trier les dimensions d’objet, connectez le port de sortie de l’étape qui émet les dimensions d’objet à ce nouveau port d’entrée.
Cliquez ensuite sur Obtenir les données pour trier les dimensions d’objet selon le résultat de tri des poses. Comme illustré ci-dessous, les dimensions et leurs poses correspondantes correspondent après le tri.