Branchement par message
Fonction
Cette Étape sert à attendre des commandes externes et à exécuter différents flux de branchement selon ces commandes.
| Le cache de l’Étape « Branchement par message » forme une file d’attente. Par exemple, après que l’Étape « Branchement par message » a reçu la commande 0 et ne l’a pas encore exécutée, elle reçoit ensuite la commande 1. Lors de l’exécution de l’Étape, la commande 0 sera exécutée en premier, et la 1 lors de l’exécution suivante. De plus, toutes les commandes mises en cache seront effacées à la fin de l’exécution. |
Scénario d’utilisation
-
Exécuter différents flux de branchement selon les commandes externes.
-
Mettre en pause l’exécution du projet et la reprendre lorsqu’une commande externe est reçue.
Description des paramètres
Comportement pendant la simulation
Ce paramètre est utilisé pour sélectionner le comportement de l’étape pendant la simulation du projet.
-
Vérifier l’entrée externe
Lorsque le projet de simulation arrive à cette étape, celle-ci vérifie l’entrée externe et sélectionne le port de sortie correspondant en fonction de la DI.
-
Exécuter via un port de sortie spécifique
Indiquez un port de sortie spécifique et le projet de simulation exécutera la branche après ce port de sortie.
-
Sélectionner le port de sortie manuellement
Lorsque le projet de simulation arrive à cette étape, une fenêtre s’ouvre pour choisir manuellement un port de sortie. Une fois sélectionné, l’exécution du projet continue.
Un exemple est montré dans la figure suivante.
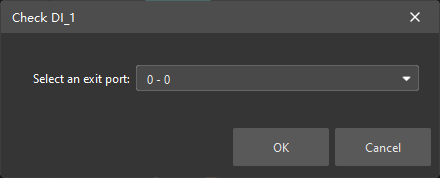
Sélectionnez un port de sortie dans le menu déroulant de « Sélectionner le port de sortie manuellement », puis cliquez sur OK. Le projet continuera à exécuter les étapes.
Cliquez sur Annuler ou X pour arrêter la simulation.
Nombre de ports de sortie
Ce paramètre sert à préciser le nombre de ports de sortie pour cette Étape.
-
Pour mettre en pause l’exécution du projet et la reprendre à la réception d’une commande externe, définissez le nombre de ports de sortie sur 1. De cette manière, le flux suivant continue à s’exécuter après que « Branchement par message » a reçu une commande externe.
-
Pour exécuter les flux de branchement correspondants selon différentes commandes externes, définissez le nombre de ports de sortie sur une valeur supérieure à 1. Veuillez définir le nombre de ports de sortie en fonction du nombre de branches réellement nécessaires.
L’affichage des paramètres varie selon le nombre de ports de sortie. Veuillez consulter la section correspondante selon vos besoins.
Nombre de ports de sortie=1
Les paramètres suivants peuvent être définis lorsque Nombre de ports de sortie vaut 1.
Il est généralement utilisé pour interrompre l’exécution du projet. Le flux suivant continue à s’exécuter après que « Branchement par message » a reçu une commande externe.
Affecter le mouvement suivant (interrompra la planification)
Cette Étape interrompt la planification par défaut, c’est‑à‑dire que la planification s’arrête à cette Étape et celle basée sur le flux de travail suivant reprend après la réception d’une commande externe.
| Planification : Le processus par lequel le logiciel tente de trouver une trajectoire sans collision que le robot peut suivre pour atteindre la position cible. |
Délai d’attente
Si sélectionné, un port de sortie de dépassement de délai est ajouté, et vous pouvez définir le paramètre Délai d’attente.
Lorsque le temps d’attente de la commande externe dépasse la valeur Délai d’attente définie, le port de sortie de dépassement de délai sera emprunté.
Exemples d’application
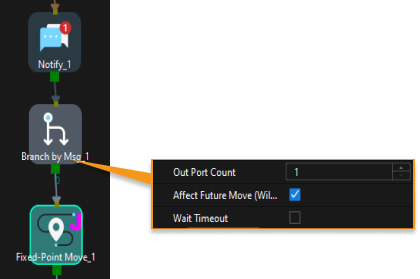
« Notify_1 » envoie des messages à Adapter, qui collecte les informations nécessaires et calcule le résultat. Adapter transmet ensuite le résultat à l’Étape correspondante et informe « Branch by Msg_1 » de continuer à s’exécuter.
Le moment de la collecte des informations sous‑jacentes utilisées pour les calculs est incertain. Il est donc nécessaire de garantir que toutes les informations sont à jour. De plus, l’Étape qui reçoit le résultat du calcul d’Adapter implique un changement d’état. Il faut donc s’assurer que l’Étape reçoit le résultat avant de procéder à la planification. Par conséquent, « Branchement par message » est nécessaire pour interrompre la planification.
Nombre de ports de sortie>1
Les paramètres suivants peuvent être définis lorsque Nombre de ports de sortie est supérieur à 1.
Il est généralement utilisé pour exécuter les flux de branchement correspondants en fonction des commandes externes.
| Lorsqu’il y a plus de 5 ports de sortie, les ports sont regroupés pour l’affichage. Appuyez sur la touche Ctrl et double‑cliquez sur le bloc d’Étape pour afficher tous les ports de sortie. Les numéros de ports de sortie et les Étapes connectées seront affichés dans le tableau sous le panneau des paramètres de l’Étape. |
Port de sortie pour la pré‑planification
Pour garantir la continuité de la planification, il est nécessaire de spécifier le port de sortie de pré‑planification. On spécifie généralement la branche la plus probable afin de réduire la probabilité de re‑planification et de diminuer le temps d’attente du robot.
Lorsque ce paramètre est défini comme non‑port de sortie, avec une valeur par défaut de -1, cela signifie que le port de sortie de pré‑planification n’est pas spécifié.
Délai d’attente
Si sélectionné, un port de sortie de dépassement de délai est ajouté, et vous pouvez définir le paramètre Délai d’attente.
Lorsque le temps d’attente de la commande externe dépasse la valeur Délai d’attente, le port de sortie de dépassement de délai sera emprunté.
Exemples d’application
Dans la communication de l’Interface standard, utilisez Branchement par message pour appeler différents projets de vision.
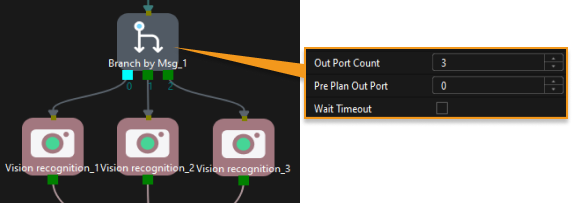
Prenons une commande TCP/IP à titre d’exemple : si l’ID de l’Étape « Branchement par message » est 1, alors le flux de branchement derrière le port de sortie 0 sera exécuté lorsque la commande 203,1,1 est envoyée ; le flux de branchement derrière le port de sortie 1 sera exécuté lorsque la commande 203,1,2 est envoyée ; et ainsi de suite.
| Pour des informations détaillées sur les commandes de l’Interface standard, veuillez vous référer à Commande 203 — Définir le port de sortie pour Branchement par message dans Mech-Viz. |