Ajuster les poses V2
Fonction
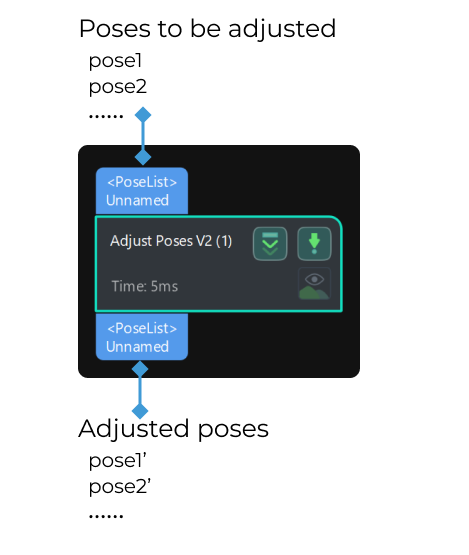
Cette Étape permet de manipuler des poses, notamment de les transformer dans le repère du robot, ainsi que d’effectuer des opérations de translation, de rotation et de tri.
Scénario d’utilisation
Cette Étape peut être largement utilisée dans des scénarios d’ajustement de poses.
|
L’Étape « Ajuster les poses V2 » ne peut pas être utilisée comme entrée ou sortie d’une Procédure. Sinon, le flux de données de l’Étape « Ajuster les poses V2 » sera interrompu lors de l’exécution du projet ou à l’ouverture de l’assistant de configuration. |
Description des paramètres
- Assistant de configuration
-
Description: Ce paramètre constitue le point d’entrée de l’outil d’ajustement des poses.
Instruction: Cliquez sur le bouton Assistant de configuration pour ouvrir l’outil d’ajustement des poses. Consultez Présentation de l’interface utilisateur pour la présentation de l’interface utilisateur et des fonctionnalités. Consultez Outil d’ajustement des poses pour des instructions détaillées.
|
Vous pouvez également cliquer sur le bouton Assistant de configuration sur le bloc Étape pour ouvrir l’outil d’ajustement des poses. |
- Sélectionner la stratégie de traitement des poses
-
Description: Ce paramètre spécifie la stratégie de traitement des poses.
Note: Si vous devez changer la stratégie de traitement des poses lorsque l’outil d’ajustement des poses est ouvert, effectuez le changement dans l’outil, ou fermez l’outil et réessayez.