Faire pivoter l’axe pour minimiser l’angle compris par rapport à la direction de référence
Fonction
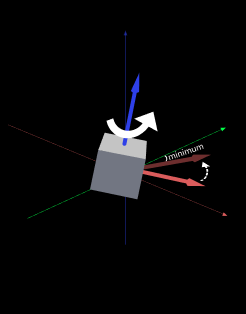
Ajuster les axes des poses vers la direction qui minimise l’angle par rapport aux directions de référence, en pivotant autour des axes de pose sélectionnés, sous contraintes de symétrie.
Scénario d’utilisation
Pour divers scénarios où l’orientation des poses doit être ajustée.
Cette étape appartient à une version antérieure. Veuillez plutôt utiliser la nouvelle étape Faire pivoter librement des poses vers des directions, qui offre un éventail de fonctions plus large. Utilisez-la avec Créer facilement des Vector3D.
Description des paramètres
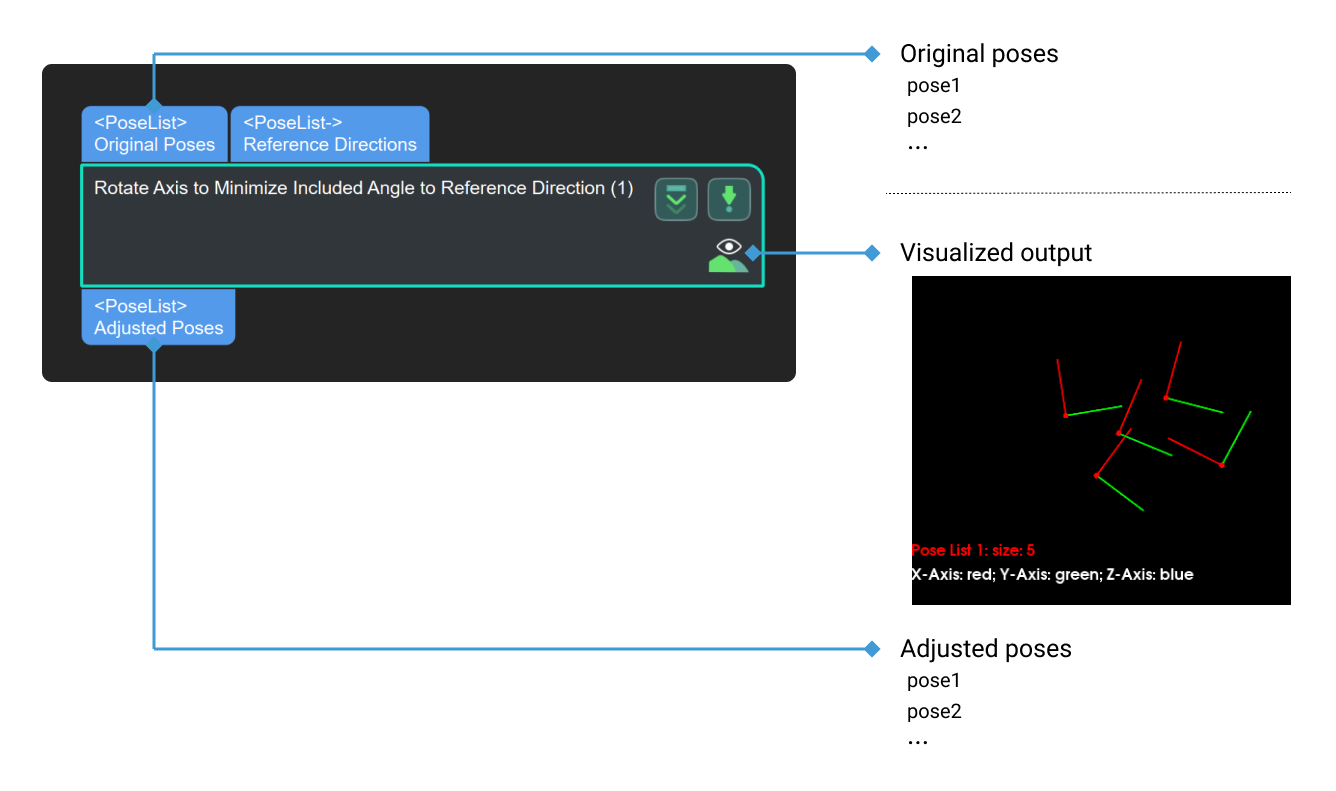
Paramètres de visualisation
- Type de pose à visualiser
-
Instruction : Ce paramètre détermine le type de pose à visualiser.
Options :
-
Avant (pose avant traitement)
-
Après (pose après traitement)
-
Toutes (toutes les poses avant et après traitement)
Paramètre par défaut : Après.
-
Utiliser le point de référence
Description : Ce paramètre permet de choisir si le point de base est utilisé pour calculer la direction de référence. Lorsque l’option est sélectionnée, vous devez définir les paramètres dans Paramètres du point de référence.
Paramètre par défaut : non sélectionné.
Instruction : Sélectionnez l’option uniquement lorsque vous utilisez le point de base pour calculer la direction de référence. La direction construite part de la pose d’entrée et pointe vers le point de référence.
Paramètres du point de référence
- Utiliser Z relatif
-
Description : Ce paramètre détermine s’il faut remplacer la valeur Z du point de référence. Valeur Z du point de référence = valeur Z de la pose d’origine + valeur relative.
Paramètre par défaut : non sélectionné.
- X
-
Description : la valeur de la coordonnée X du point de référence.
Valeur par défaut : 0.0000
- Y
-
Description : la valeur de la coordonnée Y du point de référence.
Valeur par défaut : 0.0000
- Z
-
Description : la valeur de la coordonnée Z du point de référence.
Valeur par défaut : 0.0000
- Z relatif
-
Description : la valeur de translation relative dans la direction Z. Lorsque Utiliser Z relatif est sélectionné, vous devez définir ce paramètre.
Valeur par défaut : 0.0000
Paramètres d’axe
- Axe fixe
-
Description : Ce paramètre spécifie l’axe qui reste invariant pendant la rotation de la pose.
Options : X, Y, Z.
Paramètre par défaut : Y
- Axe à pivoter
-
Description : Ce paramètre sert à sélectionner l’axe qui est orienté vers une direction spécifiée.
Options : X, Y, Z.
Paramètre par défaut : Z
Paramètres de la direction de référence
- X
-
Description : le vecteur de direction de l’axe de référence X.
Valeur par défaut : 0.0000
- Y
-
Description : le vecteur de direction de l’axe de référence Y.
Valeur par défaut : 0.0000
- Z
-
Description : le vecteur de direction de l’axe de référence Z.
Valeur par défaut : 1.0000