Sortie
Fonction
Cette Étape envoie le résultat de vision du projet en cours vers Mech-Viz ou le composant de communication pour le prélèvement ultérieur.
|
Il n’est possible d’ajouter qu’une seule Étape « Sortie » dans un projet de vision, ce qui signifie que chaque projet de vision contient exactement une Étape « Sortie ». |
Scénario d’utilisation
Cette Étape est généralement utilisée pour envoyer divers résultats de vision du projet en cours vers d’autres services.
Entrée et sortie
Puisque cette Étape envoie des résultats vers des services externes, elle n’a pas de ports de sortie connectés aux Étapes suivantes et ne possède que des ports d’entrée, qui existent en trois types de ports : Personnalisé, Prédéfini (résultat de vision) et Prédéfini (trajectoire du robot). Chacun correspond à un type d’entrée de données différent.
|
Tous les ports par défaut doivent être connectés à des données d’entrée valides ; sinon, une erreur se produira lors de l’exécution de l’Étape « Sortie ». |
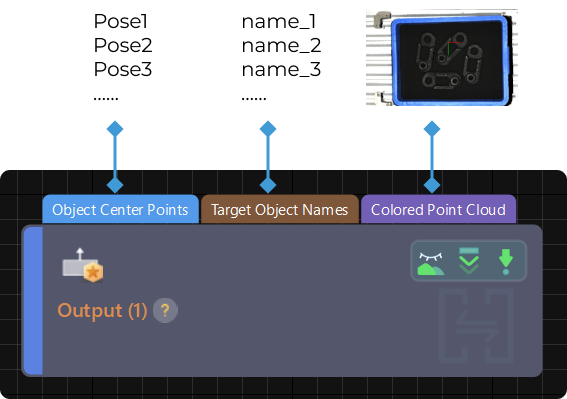
Prenons le type de port « Prédéfini (résultat de vision) » comme exemple ; l’entrée de cette Étape est illustrée dans la figure ci-dessous.
|
Lorsque l’objet cible est enregistré à l’aide du flux de travail « Aucun modèle de nuage de points requis » dans l’éditeur d’objets cibles, le point de préhension doit être saisi directement, et l’Étape émettra le même point de préhension que celui en entrée. |
Description des paramètres
Paramètres du type de port
- Type de port
-
Description: Ce paramètre permet de sélectionner le type de port de l’Étape.
Liste de valeurs: Prédéfini (résultat de vision), Prédéfini (trajectoire du robot), Personnalisé
-
Prédéfini (résultat de vision): Sélectionnez ce type de port lorsque Mech-Vision est uniquement utilisé pour le traitement de vision, puis le résultat de vision est envoyé à Mech-Viz ou à un service externe.
-
Prédéfini (trajectoire du robot): Sélectionnez ce type de port lorsque Mech-Vision est utilisé à la fois pour le traitement de vision et la planification de trajectoire.
-
Personnalisé: Sélectionnez ce type de port si vous devez personnaliser les données envoyées à Mech-Viz.
Valeur par défaut: Prédéfini (résultat de vision)
Instruction: Sélectionnez le type de port en fonction des besoins réels.
-
Prédéfini (résultat de vision)
Ce type de port convient aux communications Master-Control, Standard Interface ou Adapter.
Mech-Viz peut recevoir les résultats de vision émis par ce type de port sous différents modes de communication, seule la logique de communication différant :
-
Lorsque le mode de communication Master-Control est utilisé, le système de vision envoie le résultat de vision au robot.
-
Lorsque le mode de communication Standard Interface ou Adapter est utilisé, le dispositif externe (robot, API ou ordinateur hôte) envoie des commandes au système de vision, et le système de vision renvoie le résultat de vision au dispositif externe.
Scénario d’utilisation
- Sélectionner le scénario
-
Description: Sélectionnez le scénario d’utilisation de la solution actuelle.
Liste de valeurs: Appariement (Alimentation machine/Positionnement/Assemblage), Dépalettisation, Autres
Scénario Description Guide rapide de reconnaissance de l’objet cible Appariement (Alimentation machine/Positionnement/Assemblage)
Adapté aux scénarios où des objets cibles sont créés dans l’éditeur d’objets cibles et où les poses des objets cibles sont obtenues par appariement avec le modèle de nuage de points. Par exemple, les applications d’alimentation de machine, de positionnement et d’assemblage.
Reconnaissance d’objet cible dans des scénarios d’alimentation de machine
Dépalettisation
Adapté aux scénarios de dépalettisation. Les poses des objets cibles peuvent être obtenues par apprentissage profond ou d’autres méthodes, sans appariement avec le modèle de nuage de points.
Reconnaissance d’objet cible dans des scénarios de dépalettisation
Autres
Adapté à la préhension dans d’autres scénarios, tels que la prise d’objets polyvalents en supermarché et la prise en caisse.
Valeur par défaut: Appariement (Alimentation machine/Positionnement/Assemblage)
- Méthode de conversion des données
-
Description: En sélectionnant la méthode de conversion du résultat, cette Étape convertit le résultat de reconnaissance en type de données nécessaire à la préhension.
Liste de valeurs: Générer une stratégie de préhension basée sur le point central de l’objet, Générer une stratégie de préhension basée sur des points de préhension
-
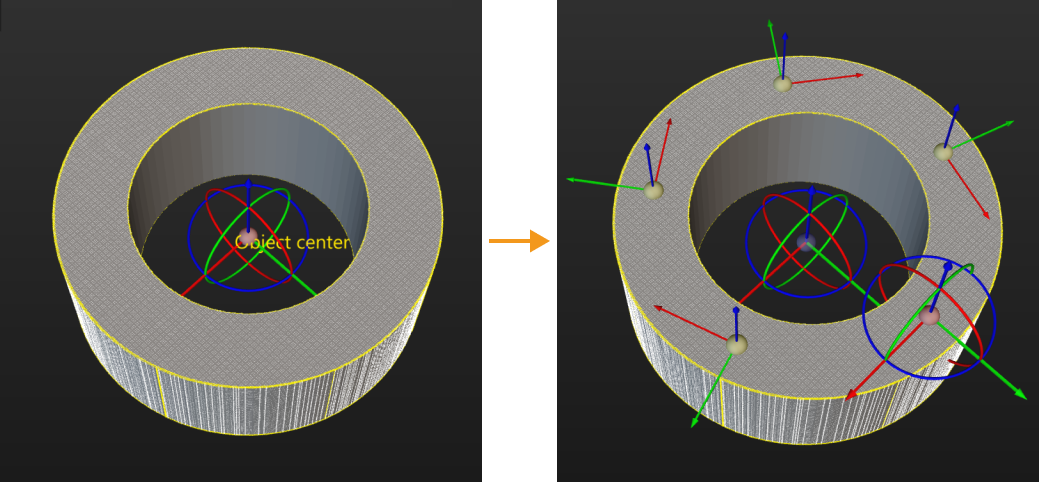
Générer une stratégie de préhension basée sur le point central de l’objet: Convient aux objets cibles symétriques, nécessitant un ajustement d’orientation du point central de l’objet. Une fois cette option sélectionnée, vous devez fournir le point central de l’objet à l’Étape « Sortie », qui convertira automatiquement le point central de l’objet en point de préhension correspondant.
-
Générer une stratégie de préhension basée sur des points de préhension: Convient aux objets cibles disposant de plusieurs points de préhension devant être filtrés. Une fois cette option sélectionnée, vous devez fournir le point de préhension et les informations du point de préhension à l’Étape « Sortie ».
Valeur par défaut: Générer une stratégie de préhension basée sur le point central de l’objet
-
- Objet cible sans modèle de nuage de points
-
Description: Sélectionnez un objet cible qui ne nécessite pas de modèle de nuage de points, et cette Étape peut émettre les informations de point de préhension de l’objet cible. Veuillez régler ce paramètre lorsque le scénario d’utilisation est « Dépalettisation » ou « Autres ».
Paramètres de détection de collision
- Envoyer le nuage de points au service externe
-
Description: Ce paramètre est utilisé pour envoyer le nuage de points à Mech-Viz. Il est généralement utilisé pour le débogage ou la vérification du résultat d’exécution du projet.
Paramètre par défaut: Sélectionné
- Type de nuage de points
-
Description: Ce paramètre permet de sélectionner le type de nuage de points à envoyer à Mech-Viz.
Liste de valeurs: CloudXYZRGB (nuage de points coloré), CloudXYZ (nuage de points), et CloudXYZNormal (nuage de points avec normales)
Paramètre par défaut: CloudXYZRGB
- Nuage de points dans le repère de la caméra
-
Description: Veuillez sélectionner ce paramètre lorsque le nuage de points est dans le repère de la caméra. Une fois cette option sélectionnée, le nuage de points sera converti dans le repère du robot et envoyé à Mech-Viz. Si cette option n’est pas sélectionnée, le nuage de points sera envoyé à Mech-Viz directement.
Paramètre par défaut: Sélectionné
- Supprimer le nuage de points de forme irrégulière
-
Description: Une fois cette option activée, tout nuage de points chevauchant le modèle de collision de l’objet cible ayant une forme 3D non standard sera supprimé par Mech-Vision afin d’éviter les interférences dans la détection de collision. Veuillez régler ce paramètre lorsque le scénario d’utilisation est « Appariement (Alimentation machine/Positionnement/Assemblage) ».
Paramètre par défaut: Non sélectionné
Instruction: Si vous devez détecter les collisions sur les objets cibles tout au long du processus, de la prise à la dépose, veuillez sélectionner ce paramètre et vous assurer que le modèle de collision est configuré pour l’objet cible. Veuillez noter que ce paramètre est invalide pour les objets cibles générés avec des formes 3D courantes dans l’éditeur d’objets cibles.
- Rayon de recherche du nuage de points de l’objet cible
-
Description: En prenant n’importe quel point du nuage de points de l’objet cible comme centre, le nuage de points à l’intérieur du rayon de recherche sera supprimé. Veuillez régler ce paramètre lorsque Supprimer le nuage de points de forme irrégulière est sélectionné.
Valeur par défaut: 3 mm
Autres paramètres d’entrée
- Autres entrées
-
Description: Une fois cette option sélectionnée, de nouveaux ports d’entrée « Étiquettes des points de préhension », « Dimensions de l’objet cible » et « Décalages du point de préhension » seront ajoutés à l’Étape.
Paramètre par défaut: Non sélectionné
Instruction: Une fois ce paramètre sélectionné, veuillez vous assurer que les nouveaux ports d’entrée ajoutés reçoivent des données. Sinon, l’Étape « Sortie » échouera.
Paramètres de mise à jour d’objet de scène
- Mettre à jour l’objet de scène
-
Description: Ce paramètre est généralement utilisé dans des scénarios où la pose du bac doit être mise à jour dynamiquement. Une fois cette option sélectionnée, des ports « Noms des objets de scène », « Dimensions des objets de scène » et « Poses des objets de scène » seront ajoutés à l’Étape.
Paramètre par défaut: Non sélectionné
Correction de dérive de précision
- Correction automatique de la dérive de précision du système de vision
-
Description: Une fois ce paramètre sélectionné, la dérive de précision du système de vision sera corrigée automatiquement. Ce paramètre ne s’affichera qu’après le déploiement de la fonctionnalité Correction automatique de la dérive de précision dans le système de vision EIH/ETH dans l’outil d’analyse des erreurs.
Paramètre par défaut: Sélectionné
Instruction: Une fois la fonctionnalité Correction automatique de la dérive de précision dans le système de vision EIH/ETH déployée, vous pouvez sélectionner ce paramètre pour activer la correction automatique.
Prédéfini (trajectoire du robot)
Convient au mode de communication Standard Interface ou Adapter. Le dispositif externe (robot, API ou ordinateur hôte) envoie des commandes au système de vision, et le système de vision renvoie les points de passage planifiés au dispositif externe.
Une fois ce type de port sélectionné, seule l’Étape « Planification de trajectoire » peut être utilisée pour recevoir le résultat de vision correspondant à ce type de port. La réception de résultats de vision via Mech-Viz n’est pas prise en charge.
Personnalisé
Convient au mode de communication Standard Interface ou Adapter. Le dispositif externe (robot, API ou ordinateur hôte) envoie des commandes au système de vision, et le système de vision renvoie les points de passage planifiés au dispositif externe.
Une fois ce type de port sélectionné, des clés prédéfinies et des clés personnalisées peuvent être utilisées. En général, il est recommandé d’utiliser des clés prédéfinies. Si une clé prédéfinie ne répond pas aux exigences d’une commande de communication personnalisée, vous pouvez utiliser une clé personnalisée.
- Nom des ports personnalisés
-
Description: Ce paramètre est utilisé pour personnaliser le port d’entrée.
Instruction: Cliquez sur Ouvrir l’éditeur, puis sélectionnez le port d’entrée que vous souhaitez ajouter dans la fenêtre Assistant de configuration de Sortie.
Ports d’entrée Description Remarque poses
Poses d’objets. Format tableau.
Obligatoire
labels
Étiquettes d’objets. Format tableau de même longueur que poses.
Facultatif
sizes
Dimensions 3D des objets de même longueur que poses ou de longueur 0.
Facultatif
offsets
Décalage du point de préhension par rapport au point central de l’objet. Format tableau de même longueur que poses ou de longueur 0.
Facultatif
objectIndexes
Indice de l’objet. Format tableau de même longueur que poses ou de longueur 0.
Facultatif
scene_object_names
Liste des noms des objets de scène à mettre à jour.
Facultatif
scene_object_sizes
Liste des dimensions des objets de scène à mettre à jour.
Facultatif
scene_object_poses
Liste des poses des objets de scène à mettre à jour.
Facultatif
workobject_data
Stratégie de préhension de l’objet cible à fournir à Mech-Viz. Une fois ce port sélectionné, connectez-le au port de sortie « Picking Strategy » de l’Étape Générer une stratégie de préhension. Le port de sortie « Picking Strategy » apparaît lorsque la « Méthode de conversion des données » est réglée sur « Générer une stratégie de préhension basée sur des points de préhension » ou « Générer une stratégie de préhension basée sur le point central de l’objet ».
Obligatoire lors de l’utilisation de Mech-Viz
|