Exigences de montage de la caméra
Il existe deux modes de montage courants pour la caméra : Eye to hand (ETH) et Eye in hand (EIH). Vous pouvez déterminer le mode en fonction de la position relative de la caméra par rapport au robot et des exigences du temps de cycle global. Les caractéristiques et avantages de ces deux modes sont présentés dans le tableau ci-dessous.
Mode de montage |
Vision hors poignet (ETH) |
Vision au poignet (EIH) |
|---|---|---|
Caractéristiques |
La caméra est montée sur un cadre de montage indépendant du robot. |
La caméra est montée sur le dernier axe du robot et se déplace avec le robot. |
Illustration |
|
|
Avantages |
|
|


Par ailleurs, les exigences relatives au montage du cadre de montage de la caméra et au câblage varient selon le mode de montage, comme détaillé ci-dessous.
Exigences de montage de la caméra (ETH)
Lorsque la caméra est montée sur un cadre de montage (support) indépendant du robot, vous devez tenir compte de sa stabilité, de sa fiabilité et du câblage pour garantir la précision de la capture d’image. Remarques spécifiques :
-
Fixer le cadre de montage de la caméra
Vous pouvez utiliser des boulons chimiques ou des boulons d’expansion pour fixer le cadre de montage de la caméra au sol, au mur, etc., ce qui offre un support stable et fiable afin d’éviter que la caméra ne vibre.
Le nombre et le type de boulons de fondation dépendent de la hauteur et de la structure du cadre de montage de la caméra. Lorsque la caméra n’est pas fixée au sol, il peut être nécessaire de renforcer le cadre de montage au moyen de murs latéraux, du plancher ou du plafond, comme illustré ci-dessous.

-
Câblage
Installez les câbles de la caméra dans des chemins de câbles disposés sur la surface des poteaux afin d’assurer un routage propre et organisé. Cela assure non seulement la sécurité et l’esthétique des câbles, mais facilite également la maintenance.
-
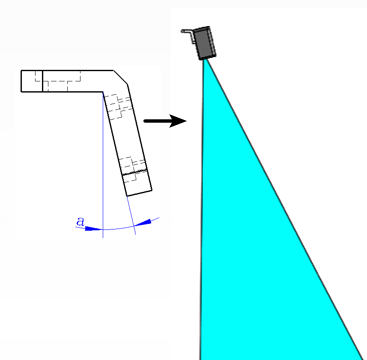
Ajuster l’angle de montage de la caméra
Normalement, la caméra est montée verticalement vers le bas. Toutefois, pour les sites de projet avec une hauteur de plafond limitée, vous pouvez incliner la caméra pour ajuster l’angle de montage. Il est recommandé, aux premières étapes de la conception de votre projet, d’effectuer des tests d’émulation et de simulation afin de vérifier que l’angle répond aux exigences réelles.
-
Vérifier le champ de vision (FOV) de la caméra
-
FOV d’imagerie effectif
Le FOV d’imagerie effectif est la zone physique dans laquelle la caméra peut acquérir un nuage de points complet. Assurez-vous que :
-
Le porte-matériaux entrant (p. ex., bac ou palette) et tous les objets cibles qu’il contient sont entièrement inclus dans ce FOV.
-
La zone doit rester exempte de toute structure, telle que des clôtures de sécurité, des tuyaux, le corps du robot ou des pinces, afin d’éviter des occlusions ou une perte du nuage de points.
Éléments clés à vérifier :
-
Les dimensions maximales des matériaux entrants, y compris la hauteur d’empilage, doivent se situer dans le FOV d’imagerie effectif de la caméra.
-
Une marge suffisante (recommandé ≥150–200 mm de chaque côté) doit être prévue autour du porte-matériaux afin de compenser les écarts de position.
-
La hauteur de montage de la caméra doit correspondre à la distance de travail spécifiée afin d’éviter un FOV insuffisant dû à une distance excessive.
-
-
FOV de balayage de sécurité de la caméra
Bien que le FOV de balayage de sécurité de la caméra ne soit pas utilisé pour l’imagerie, les points suivants doivent être garantis dans certaines applications :
-
Le cadre de montage de la caméra ne doit pas obstruer la trajectoire de mouvement du robot ni gêner la pose de prise.
-
-
|
Étant donné que la position de la caméra ne peut pas être ajustée après l’installation, assurez-vous que le FOV couvre entièrement toute la zone de travail avant de monter la caméra sur le cadre de montage. |
|
Il est recommandé d’utiliser l’outil Sélecteur de caméra 3D et Mech-Viz fourni par Mech-Mind pour effectuer une validation par simulation en amont afin d’identifier d’éventuels problèmes d’occlusion du FOV. |
Exigences de montage de la caméra (EIH)
Respectez les remarques suivantes lorsque vous montez la caméra sur le dernier axe du robot :
-
Installer le cadre de montage de la caméra
Lors de l’installation du cadre de montage (support) de la caméra, vous devez prendre des mesures pour éviter qu’il ne se desserre, telles que l’application de frein filet sur les boulons de fixation, l’utilisation de rondelles anti-desserrage, etc.
-
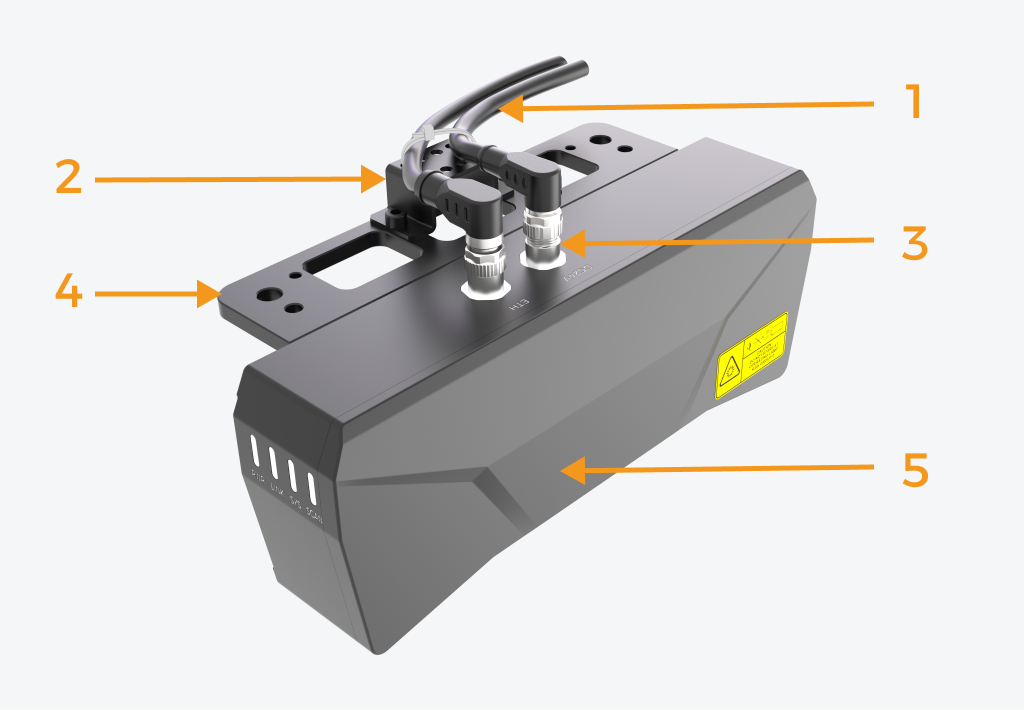
Sécuriser les câbles
Il est nécessaire de fixer les câbles près du connecteur de la caméra pour éviter toute contrainte sur celui-ci. Lors du faisceau de câbles, il est important de tenir compte de la tolérance de rotation de la bride terminale du robot afin d’éviter un jeu de câble insuffisant, ce qui pourrait entraîner une traction sur les câbles de la caméra, voire causer des dommages irréversibles au connecteur du câble de la caméra. La méthode de fixation des câbles est illustrée ci-dessous : 1-câble de la caméra, 2-support d’attache-câble, 3-connecteur de câble, 4-support de caméra, 5-caméra.
-
Câblage
Le cheminement des câbles doit être correctement organisé afin d’éviter que les câbles dans le dresspack soient trop longs ou trop courts. La figure suivante montre un exemple incorrect de câbles excessivement longs.

-
Protection des câbles
Utilisez le dresspack pour protéger les câbles et tenez compte des remarques suivantes :
-
Le dresspack ne doit pas utiliser de conduits de câbles auto-enroulants ni de gaines textiles.
-
Choisissez des ensembles complets standard d’accessoires pour tuyaux annelés pour le dresspack (y compris, sans s’y limiter : colliers de serrage, demi-coques, manchons de protection, etc.).
-
Le dresspack et les câbles doivent être correctement fixés et assemblés afin d’éviter l’application de couples supplémentaires sur les câbles lors des mouvements du robot.

-
-
Vérifier le champ de vision (FOV) de la caméra
-
FOV d’imagerie effectif
Le FOV d’imagerie effectif est la zone physique dans laquelle la caméra peut acquérir un nuage de points complet. Assurez-vous que :
-
Le porte-matériaux entrant (p. ex., bac ou palette) et tous les objets cibles qu’il contient sont entièrement inclus dans ce FOV.
-
Aucune structure environnante, telle que des clôtures de sécurité, des tuyaux, le corps du robot ou des pinces, ne doit pénétrer dans cette zone, car cela pourrait provoquer des occlusions ou une perte du nuage de points.
Éléments clés à vérifier :
-
Les dimensions maximales des matériaux entrants, y compris la hauteur d’empilage, doivent se situer dans le FOV d’imagerie effectif de la caméra.
-
Une marge suffisante (recommandé ≥150–200 mm de chaque côté) doit être prévue autour du porte-matériaux afin de compenser les écarts de position.
-
La hauteur de montage de la caméra doit correspondre à la distance de travail spécifiée afin d’éviter un FOV insuffisant dû à une distance excessive.
-
-
FOV de balayage de sécurité de la caméra
Bien que le FOV de balayage de sécurité de la caméra ne soit pas utilisé pour l’imagerie, les points suivants doivent être garantis dans certaines applications :
-
La caméra ne doit pas entrer en collision avec les équipements environnants ni les objets cibles pendant les mouvements du robot.
-
Lors de l’ouverture ou de la fermeture de la pince, celle-ci ne doit pas obstruer la vue de la caméra ni présenter des risques de collision.
-
-
|
Comme la caméra se déplace avec le robot, tous les points de capture d’image doivent rester dégagés. |
|
Il est recommandé d’utiliser l’outil Sélecteur de caméra 3D et Mech-Viz fourni par Mech-Mind pour effectuer une validation par simulation en amont afin d’identifier d’éventuels problèmes d’occlusion du FOV. |