Description du fichier [robot]_profile.json
[robot]_profile.json enregistre des informations de base sur le robot, notamment le nom du robot, la charge utile, la portée, le nombre d’axes, la position d’origine et la vitesse maximale.
Le fragment de code ci-dessous est extrait du fichier [robot]_profile.json à titre d’exemple.
{
#information in the library
"robot_display_names": ["name1","name2","name3"],
"payload": [40,40,60],
"reach": 2.55,
"axes": 6,
#robot home gesture
"home_jps":[0,90,0,0,90,0],
#singularity detection
"max_tcp_vel": 7,
"max_tcp_acc": 2,
"max_joint_vel": 500,
"max_joint_acc": 100
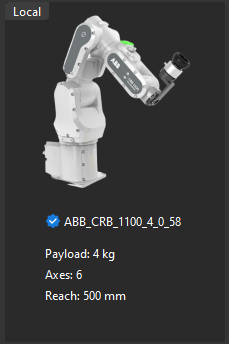
}Informations affichées sur la fiche du modèle de robot
Parameter |
robot_display_names |
Example |
"robot_display_names":ABB_CRB_1100_4_0_475 |
Description |
Nom du modèle de robot. |
Parameter |
"payload": [payload] |
Example |
"payload": [4] |
Description |
Charge nominale (kg). |
Parameter |
reach |
Example |
"reach":0.475 |
Description |
Rayon d’action (m). |
Parameter |
axes |
Example |
"axes":6 |
Description |
Nombre d’axes mobiles. |
Pose initiale du robot
Parameter |
home_jps |
Example |
"home_jps":[0,90,0,0,90,0] |
Description |
Pose par défaut (unité : °) du modèle de robot dans le logiciel. |
Détection de singularités
Les paramètres suivants sont utilisés pour la détection des singularités.
Parameter |
max_tcp_vel |
Example |
"max_tcp_vel": 7 |
Description |
Vitesse maximale du TCP (m/s). |
Parameter |
max_tcp_acc |
Example |
"max_tcp_acc": 2 |
Description |
Accélération maximale du TCP (m/s²). |
Parameter |
max_joint_vel |
Example |
"max_joint_vel": 500 |
Description |
Vitesse maximale des articulations (°/s). |
Parameter |
max_joint_acc |
Example |
"max_joint_acc": 100 |
Description |
Accélération maximale des articulations (°/s²). |