Déployer la fonctionnalité de correction de dérive dans la solution
Cette section fournit des instructions sur le déploiement de la fonctionnalité de correction de dérive dans la solution d’un système de vision ETH.
Vue d’ensemble du processus de déploiement
Le processus de déploiement de cette fonctionnalité est présenté ci‑dessous.

-
Se familiariser avec les prérequis de déploiement : Se familiariser avec les prérequis pour le déploiement de « Auto‑correction de la dérive de précision dans le système de vision ETH » dans la solution.
-
Effectuer les préparatifs : Préparer tous les matériels nécessaires.
-
Collecter les données du poste de travail : Saisir les données du poste de travail pour calculer le nombre et la distribution des points de capture d’image pour la sphère d’étalonnage.
-
Valider les points de capture d’image : Calculer la répétabilité des poses de la sphère d’étalonnage à partir de chaque point de capture d’image afin de garantir des données précises et fiables pour la correction de la dérive de précision.
-
Générer un programme d’exemple : Générer un programme d’exemple pour le robot, basé sur les points de capture d’image, pour la correction ultérieure de la dérive de précision dans le système de vision.
-
Activer l’auto‑correction : Activer la fonctionnalité d’auto‑correction dans le projet de prélèvement. Ensuite, ajuster et charger le programme d’auto‑correction du robot pour corriger la dérive de précision du système de vision pendant la production.
-
Vérifier le résultat du déploiement : Vérifier le résultat du déploiement de la fonctionnalité « Auto‑correction de la dérive de précision dans le système de vision ETH » dans la solution.
Prérequis de déploiement
Les prérequis suivants doivent être remplis avant de procéder au déploiement :
-
Assurez‑vous que la solution de vision pour le prélèvement a été déployée pour le poste de travail.
-
Assurez‑vous que les contrôles de précision de la caméra, du robot et des paramètres extrinsèques ont été effectués, et que le robot est en mesure de prélever avec succès les objets cibles. Veuillez consulter Outil d’analyse des erreurs pour des instructions spécifiques.
-
Assurez‑vous qu’il y a suffisamment d’espace à l’extrémité du robot pour fixer la sphère d’étalonnage.
Préparatifs
Si tous les prérequis sont satisfaits, vous pouvez commencer à préparer les matériels et à monter la sphère d’étalonnage.
-
Vérifier les matériels. Ouvrez la boîte d’emballage du Kit ETH et assurez‑vous qu’elle contient une sphère d’étalonnage, une poire soufflante à embout souple et d’autres composants.
-
Monter la sphère d’étalonnage selon les exigences.
-
Préchauffer la caméra à l’avance. Si la nouvelle caméra est en état de démarrage à froid, la précision des paramètres intrinsèques peut changer en raison de l’augmentation de la température pendant l’acquisition d’images. Par conséquent, la caméra doit être préchauffée à l’avance. Veuillez consulter Outil de préchauffage pour des instructions détaillées.
Démarrer le déploiement
Après avoir terminé les déploiements ci‑dessus, vous pouvez aller à la barre de menu et sélectionner pour entrer dans l’outil. Ensuite, cliquez sur le bouton Démarrer le déploiement en bas à droite pour démarrer le déploiement.
|
Ici, nous utilisons une sphère d’étalonnage de 60 mm de diamètre comme exemple pour illustrer le processus de déploiement de la solution « Auto‑correction de la dérive de précision dans le système de vision ETH ». |
Collecter les données du poste de travail
Cette étape calcule le nombre et la distribution des points de capture d’image en fonction des données du poste de travail saisies.
Se connecter à une caméra
-
Cliquez sur le bouton Sélectionner la caméra pour sélectionner la caméra utilisée dans le projet de prélèvement.
-
Sélectionnez le projet de prélèvement pour lequel la dérive de précision doit être corrigée, ainsi que le groupe de paramètres d’étalonnage et le groupe de paramètres de configuration correspondants.
Définir les dimensions de la sphère d’étalonnage
Veuillez définir le diamètre de la sphère d’étalonnage selon la situation réelle.
Sélectionner le scénario
-
Sélectionnez l’agencement de l’objet cible.
Définissez l’agencement de l’objet cible selon la situation réelle.
-
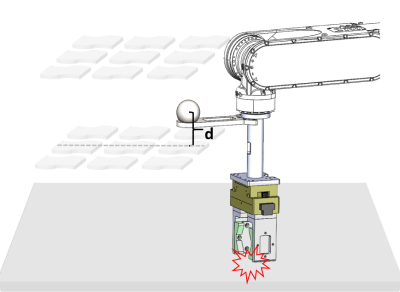
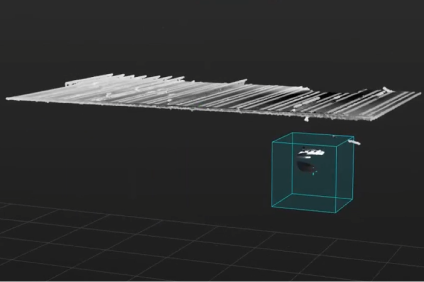
Définissez la distance entre la sphère la plus basse et l’objet cible le plus bas.
Cette distance correspond à celle entre l’objet cible de la couche inférieure et le centre de la sphère d’étalonnage lorsque le robot déplace la sphère vers une position la plus basse atteignable, comme illustré ci‑dessous.
-
Définissez les dimensions de l’espace du nuage de points cible.
Définissez la longueur, la largeur et la hauteur du nuage de points cible selon les conditions sur site.
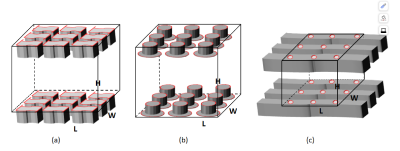
(a) Si la mise en correspondance est effectuée à l’aide du nuage de points de la surface supérieure de l’objet, la hauteur du nuage de points cible est la distance entre la surface supérieure de l’objet de la couche la plus haute et la surface supérieure de l’objet de la couche la plus basse.
(b) Si la mise en correspondance est effectuée à l’aide du nuage de points local de la surface supérieure de l’objet, la hauteur du nuage de points cible est la distance entre la surface supérieure de l’objet de la couche la plus haute et la surface supérieure de l’objet de la couche la plus basse.
(c) Si la mise en correspondance est effectuée à l’aide de plusieurs couches de nuages de points de surface, la hauteur du nuage de points cible est la distance entre la surface supérieure de l’objet de la couche la plus haute et la surface inférieure de l’objet de la couche la plus basse.
-
Pour des objets monocouche, lorsque le nuage de points de la surface supérieure de l’objet est utilisé pour la mise en correspondance, la hauteur du nuage de points cible est 0.
-
Si des cloisons existent entre les couches de l’objet cible, la hauteur du nuage de points cible doit inclure la hauteur de la cloison.
-
Après les réglages, cliquez sur Démarrer le calcul pour calculer le nombre et la distribution des points de capture d’image. Le résultat du calcul sera affiché sur la page suivante.
Après avoir saisi les données du poste de travail, cliquez sur Suivant pour valider les points de capture d’image.
Valider les points de capture d’image
Cette étape calcule la répétabilité des poses de la sphère d’étalonnage à partir de chaque point de capture d’image afin de garantir des données précises et fiables pour la correction de la dérive de précision.
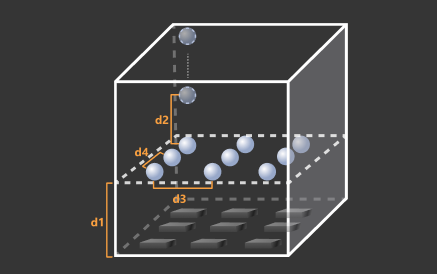
Vérifier le résultat du calcul
Après avoir cliqué sur le bouton Démarrer le calcul dans l’étape « Collecter les données du poste de travail », le résultat du calcul sera affiché ici. Vous pouvez définir les points de capture d’image et les couches en fonction du résultat et de l’illustration.
Valider les points de capture d’image
Après avoir obtenu la distribution de la sphère d’étalonnage, la répétabilité des poses de la sphère d’étalonnage à partir de chaque point de capture d’image doit être calculée afin de garantir des données précises et fiables pour la correction de la dérive de précision.
|
Il est recommandé de valider les points de capture d’image couche par couche, de bas en haut, en terminant une couche avant de passer à la suivante. |
-
Retirez le plateau ou le bac.
-
Déplacez le robot.
Déplacez le robot vers n’importe quel point de capture d’image de la première couche et saisissez la pose de la bride du robot correspondant au point de capture d’image actuel dans le champ désigné sur l’interface.
Veuillez vous assurer qu’aucune collision ne se produit pendant le déplacement du robot vers cette pose. Il est recommandé de jogger le robot vers la pose cible à basse vitesse et d’observer s’il y aura des collisions.
S’il existe un risque de collision sur le trajet du robot, la position de la sphère d’étalonnage peut être ajustée dans n’importe quelle direction, à condition que le déplacement du point de capture d’image reste dans 100 mm.
-
Définir la ROI pour la sphère d’étalonnage.
Cliquez sur le bouton Ajuster la ROI pour définir la ROI 3D pour la sphère d’étalonnage, puis cliquez sur OK.
-
La ROI doit englober entièrement la sphère d’étalonnage, en laissant une marge égale au diamètre de la sphère sur tous les côtés.
-
Vous devez uniquement définir la ROI 3D pour la sphère d’étalonnage lors de la validation du premier point de capture d’image.
-
-
Valider les points de capture d’image.
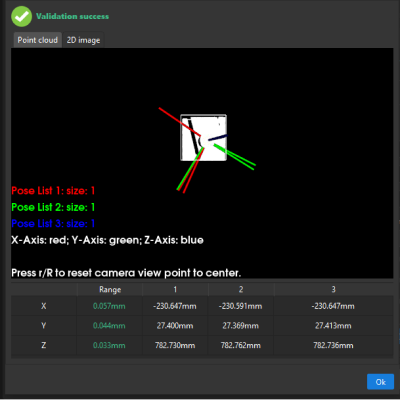
Cliquez sur le bouton Capturer l’image pour valider, et trois acquisitions d’images consécutives seront déclenchées pour calculer la répétabilité des poses de la sphère d’étalonnage. Si la validation réussit, une fenêtre de résultat de reconnaissance s’affichera avec un message indiquant « Validation réussie. »
-
Déplacez le robot vers le point de capture d’image suivant et cliquez sur Suivant. Ensuite, saisissez la pose actuelle de la bride du robot et cliquez sur Capturer l’image pour valider.
-
Répétez les étapes ci‑dessus jusqu’à ce que tous les points de capture d’image de la couche actuelle aient été validés.
-
Lorsqu’il y a plusieurs couches de points de capture d’image, répétez les étapes ci‑dessus pour terminer la validation des autres couches.
Après avoir validé tous les points de capture d’image, cliquez sur Suivant pour générer un programme d’exemple de robot pour la correction de dérive.
Générer un programme d’exemple
Vérifier la liste des points de capture d’image
Cette liste enregistre la pose de la bride du robot correspondant à chaque point de capture d’image, qui est utilisée pour générer le programme d’exemple. Le programme d’exemple contrôlera le robot pour se déplacer séquentiellement vers chaque point de capture d’image.
Générer le programme du robot
Sélectionnez la marque de robot que vous utilisez dans la liste déroulante et cliquez sur Exporter le programme d’exemple.
|
Si le programme d’auto‑correction du robot n’est pas exporté avec succès ou si le programme du robot est perdu, allez à la page Vérifier le résultat du déploiement et cliquez sur le bouton en haut à droite pour exporter le programme d’exemple. |
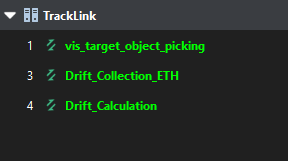
Après avoir exporté le programme d’exemple, cliquez sur le bouton Enregistrer pour enregistrer tous les déploiements. Désormais, des projets de correction de dérive seront automatiquement générés dans la solution actuelle.
-
Drift_Collection_ETH : Ce projet collecte les poses de la sphère d’étalonnage à chaque point de capture d’image.
-
Drift_Calculation : Ce projet génère les données de correction de dérive sur la base des poses de la sphère d’étalonnage collectées par le projet « Drift_Collection_ETH ».
|
Ne modifiez pas les deux projets de correction de dérive ni aucun paramètre associé. En même temps, pendant les processus de correction de dérive ultérieurs, assurez‑vous que les noms et les numéros des projets de correction de dérive restent inchangés. Lorsque les projets de correction de dérive sont générés, un modèle de nuage de points de la sphère d’étalonnage sera également automatiquement généré dans l’éditeur d’objet cible. Veuillez ne pas modifier le nom ni toute autre configuration de ce modèle de nuage de points. |
Activer l’auto‑correction
Après avoir validé les points de capture d’image, vous devez effectuer les étapes suivantes pour corriger la dérive de précision dans le processus de production réel.
-
Activez la fonctionnalité d’auto‑correction dans le projet de prélèvement.
-
Chargez le programme d’auto‑correction dans le robot pour collecter automatiquement les poses de la sphère d’étalonnage et générer les données de correction de dérive.
Activer l’auto‑correction dans le projet de prélèvement
Après le déploiement ci‑dessus, sélectionnez le paramètre « Auto‑correction de la dérive de précision dans le système de vision » de l’étape « Sortie » ou « Planification de trajectoire » dans le projet de prélèvement pour activer la fonctionnalité d’auto‑correction.
Charger les fichiers de programme dans le robot
Après avoir généré le programme d’auto‑correction du robot, chargez‑le dans le robot.
|
Selon la marque de robot utilisée dans votre projet, vous pouvez charger le programme d’auto‑correction du robot en vous référant au guide « Configurer la communication de l’interface standard » pour la marque de robot correspondante dans Communication de l’interface standard. |
Ajuster le programme du robot
Après avoir chargé le programme d’auto‑correction du robot, veuillez ajuster le programme en fonction de la situation réelle. Il suffit de jogger le robot pour définir la position Home et de définir l’adresse IP et le numéro de port de l’IPC dans les paramètres de communication pour établir la communication avec le robot. Aucune autre modification du programme n’est requise. Un robot FANUC fonctionne sur la base du segment de code suivant, qui nécessite une modification. Notez que la position Home est définie comme P[50].
J P[50] 50% FINE ;
CALL MM_INIT_SKT('8','127.0.0.1',50000,5) ;|
Si vous utilisez un robot FANUC, le programme d’exemple doit d’abord être compilé en fichier TP avant d’être chargé dans le robot. Cette étape n’est pas requise pour les autres robots. |
Si vous utilisez une marque de robot autre que FANUC, vous pouvez vous référer à la description du flux de travail du programme d’auto‑correction du robot ci‑dessous, ainsi qu’au programme d’exemple d’auto‑correction pour les robots FANUC et aux explications des instructions clés, pour ajuster ou créer un programme d’auto‑correction pour votre marque de robot spécifique.
Cliquez ici pour afficher le flux de travail de base du programme d’auto‑correction du robot.
Étape 1 : Déterminer le repère de référence du robot et le repère outil.
Étape 2 : Déplacer le robot vers la position Home.
Étape 3 : Déplacer le robot vers le point de capture d’image 1 calculé sur la couche la plus basse.
Étape 4 : Une fois que le robot atteint le point de capture d’image 1, basculer la recette de paramètres dans le projet de collecte des poses de la sphère d’étalonnage (Drift_Collection_ETH) vers celle correspondant au point de capture d’image.
Étape 5 : Une fois la recette de paramètres basculée, déclencher l’exécution du projet « Drift_Collection_ETH » et collecter les poses de la sphère d’étalonnage au point de capture d’image 1.
Étape 6 : Suivre les étapes 3 à 5 pour les autres points de capture d’image sur la couche actuelle afin de collecter les poses de la sphère d’étalonnage à chaque point.
Étape 7 : De bas en haut, répéter les étapes 3 à 6 pour les points de capture d’image restants sur les autres couches afin de collecter les poses de la sphère d’étalonnage à chaque point.
Étape 8 : Après avoir terminé la collecte des poses pour les points de capture d’image sur toutes les couches, basculer la recette de paramètres du projet Drift_Calculation pour générer les données de correction de dérive.
Étape 9 : Déclencher l’exécution du projet « Drift_Calculation » et générer les données de correction de dérive.
Étape 10 : Déplacer le robot vers la position Home.
Cliquez ici pour voir un exemple de programme d’auto‑correction pour un robot FANUC.
Le programme d’auto‑correction suivant, développé sur la base du flux de travail décrit ci‑dessus, utilise un robot FANUC. Dans ce programme d’exemple, le nombre de points de capture d’image pour la sphère d’étalonnage est de 9, l’index du projet de collecte des poses de la sphère d’étalonnage est 3, et l’index du projet de génération des données de correction de dérive est 4.
| Le programme d’auto‑correction du robot utilise plusieurs registres. Pendant l’exécution du programme, assurez‑vous que ces registres ne sont pas occupés. |
UFRAME_NUM=0 ;
UTOOL_NUM=1 ;
J P[50] 50% FINE ;
CALL MM_INIT_SKT('8','127.0.0.1',50000,5) ;
R[50:StartIndex]=1 ;
R[52:EndIndex]=9 ;
R[53:CameraIndex]=1 ;
R[54:CollectionId]=3 ;
R[55:CalculationId]=4 ;
PR[51]=P[51] ;
PR[52]=P[52] ;
PR[53]=P[53] ;
PR[54]=P[54] ;
PR[55]=P[55] ;
PR[56]=P[56] ;
PR[57]=P[57] ;
PR[58]=P[58] ;
PR[59]=P[59] ;
FOR R[51:mm_i]=R[50:StartIndex] TO R[52:EndIndex] ;
R[56]=R[51:mm_i]-R[50:StartIndex]+51 ;
L PR[R[56]] 1000mm/sec FINE ;
WAIT 3.00(sec) ;
CALL MM_SET_MOD(R[54:CollectionId],R[51:mm_i]) ;
WAIT 1.00(sec) ;
CALL MM_START_VIS(R[54:CollectionId],0,1,100) ;
WAIT 3.00(sec) ;
ENDFOR ;
CALL MM_SET_MOD(R[55:CalculationId],R[53:CameraIndex]) ;
WAIT 1.00(sec) ;
CALL MM_START_VIS(R[55:CalculationId],0,1,100) ;
WAIT 3.00(sec) ;
J P[50] 50% CNT100 ;
END ;Cliquez ici pour afficher des descriptions détaillées du flux de travail pour le programme d’auto‑correction du robot FANUC.
| Ce tableau n’explique que les instructions clés ; pour des explications détaillées de chaque instruction du programme d’auto‑correction du robot FANUC, veuillez vous référer à l’programme d’exemple pour les robots FANUC. |
| Flux de travail | ||
|---|---|---|
Code et description |
||
Définir le repère de référence |
||
Définir le repère monde comme repère de référence du robot et le repère de bride comme repère outil. |
||
Déplacer le robot vers la position Home |
||
Déplacer le robot vers la position Home où le robot est éloigné des objets cibles et des équipements environnants.
|
||
Initialiser les paramètres de communication |
||
Définir le numéro de port du robot sur 8, avec l’adresse IP de l’IPC définie sur 127.0.0.1. Le numéro de port utilisé pour la communication entre l’IPC et le robot est 50000, et le délai d’expiration est de 5 minutes. |
||
Stocker les valeurs de début et de fin de l’ID de recette de paramètres correspondant aux points de capture d’image |
||
Lors de l’export du programme du robot, l’outil calcule les valeurs de début et de fin des IDs de recette de paramètres correspondant aux points de capture d’image, stockant ces valeurs dans des registres numériques. |
||
Définir les IDs de recette de paramètres pour la caméra et les index des projets de correction de dérive |
||
Attribuer l’ID de recette de paramètres correspondant à la caméra à 1, l’index du projet « Drift_Collection_ETH » à 3, et l’index du projet « Drift_Calculation » à 4. Ces valeurs sont stockées dans des registres numériques. |
||
Stocker les points de capture d’image |
||
Stocker les neuf points de capture d’image (P[51] à P[59]) dans des registres de position (PR[51] à PR[59]) pour les déplacements ultérieurs du robot vers les positions correspondantes. |
||
Calculer, via une boucle, les numéros de registre de position pour les IDs de recette de paramètres correspondant aux points de capture d’image |
||
À l’aide d’une boucle, itérer à travers les IDs de recette de paramètres de tous les points de capture d’image (1 à 9) pour les sphères d’étalonnage. Calculer la valeur de R[56] à l’aide de cette formule, représentant le numéro de registre de position correspondant à l’ID de recette de paramètres du point de capture d’image actuel. Dans cet exemple : R[50:StartIndex] = 1 ; lorsque l’ID de recette de paramètres R[51:mm_i] = 2, R[56] = 2 − 1 + 51 = 52. À mesure de l’exécution du programme, le robot se déplace vers le point de capture d’image stocké dans le registre de position PR[52]. |
||
Déplacer le robot vers le point de capture d’image |
||
Le robot se déplace vers chaque point de capture d’image en mouvement linéaire, à une vitesse de 1000 mm/s. |
||
Basculer la recette de paramètres du projet de collecte des poses de la sphère d’étalonnage |
||
Basculer la recette de paramètres du projet « Drift_Collection_ETH » (dont l’index de projet est 3) pour la collecte des poses de la sphère d’étalonnage vers la recette de paramètres R[51:mm_i] (1~9). |
||
Déclencher le projet de collecte des poses de la sphère d’étalonnage |
||
Déclencher l’exécution du projet « Drift_Collection_ETH » (dont l’index de projet est 3) pour collecter les poses de la sphère d’étalonnage à chaque point de capture d’image. Une fois toutes les poses de la sphère d’étalonnage collectées, la boucle se termine, et les poses collectées seront utilisées pour générer les données de correction de dérive. |
||
Basculer la recette de paramètres du projet de génération des données de correction de dérive |
||
Après la collecte des poses de la sphère d’étalonnage à tous les points de capture d’image, basculer la recette de paramètres du projet « Drift_Calculation » (dont l’index de projet est 4) pour la génération des données de correction de dérive vers la recette de paramètres 1.
|
||
Déclencher l’exécution du projet de génération des données de correction de dérive |
||
Déclencher l’exécution du projet « Drift_Calculation » (dont l’index de projet est 4) pour générer les données de correction de dérive sur la base des poses de la sphère d’étalonnage collectées. |
||
Déplacer le robot vers la position Home |
||
Déplacer le robot vers la position Home où le robot est éloigné des objets cibles et des équipements environnants. |
Tester le programme du robot
Exécutez le programme d’auto‑correction du robot après l’avoir chargé dans le robot. Après l’exécution du programme, le robot se déplacera vers les points de capture d’image correspondants. Ensuite, le programme déclenchera l’exécution des projets de correction de dérive, capturera des images des sphères d’étalonnage et collectera les poses des sphères d’étalonnage. Les données de correction de dérive générées sont ensuite utilisées pour corriger la dérive de précision.
|
Selon la marque de robot utilisée dans votre projet, vous pouvez sélectionner et tester le programme d’auto‑correction du robot en vous référant au guide « Configurer la communication de l’interface standard » pour la marque de robot correspondante dans Communication de l’interface standard. |
Après avoir exécuté le programme d’auto‑correction du robot, des enregistrements de correction seront générés et pourront être consultés sur le Tableau de suivi des données.
Tester la prise des objets cibles
Exécutez le programme de prélèvement du robot. Si le robot peut prélever avec précision l’objet cible, le déploiement est considéré comme réussi.
Notez qu’après la fin du test de prélèvement, pour assurer une stabilité à long terme dans la production réelle, vous devez configurer le seuil d’alerte dans le Tableau de suivi des données. Le seuil est généralement recommandé à 10 mm. Si la compensation de dérive dépasse ce seuil, vérifiez que la caméra et l’outil du robot sont correctement fixés et assurez‑vous que la position zéro du robot est précise.
Déterminer le cycle de correction
En fonction des conditions réelles sur site, exécutez périodiquement (manuellement ou automatiquement) le programme d’auto‑correction du robot pour collecter régulièrement les poses de la sphère d’étalonnage, permettant une correction périodique de la dérive de précision du système de vision.
Vous avez maintenant terminé le déploiement de « Auto‑correction de la dérive de précision dans le système de vision ETH » dans la solution. Cliquez sur le bouton Terminer pour revenir à la page d’accueil de l’outil.
|
Après le déploiement, il est recommandé d’exporter le groupe de paramètres de configuration actuel de la caméra vers une sauvegarde locale. Cela garantit que, si la caméra est endommagée et doit être remplacée, le groupe de paramètres de configuration pourra toujours être récupéré. |
|
Après le déploiement, vous pouvez cliquer sur le bouton Afficher le déploiement en bas de la page d’accueil de l’outil pour vérifier les résultats du déploiement. Le résultat du déploiement inclut les IDs des caméras avec la fonctionnalité de correction de dérive déployée, le chemin d’enregistrement du résultat de déploiement, les informations sur les points de capture d’image et la recette du n° de caméra. 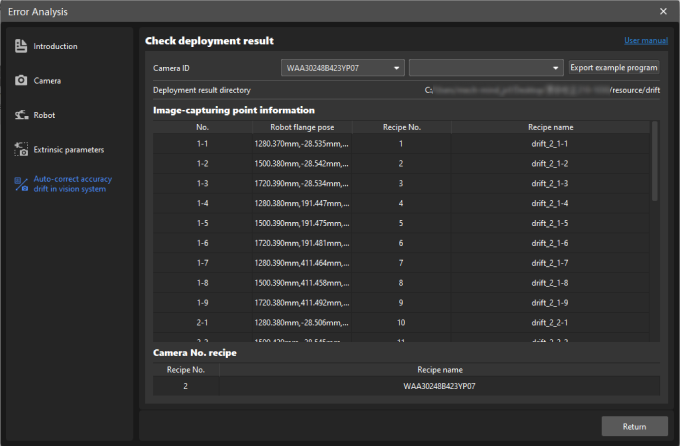
|