Communication par Interface Standard
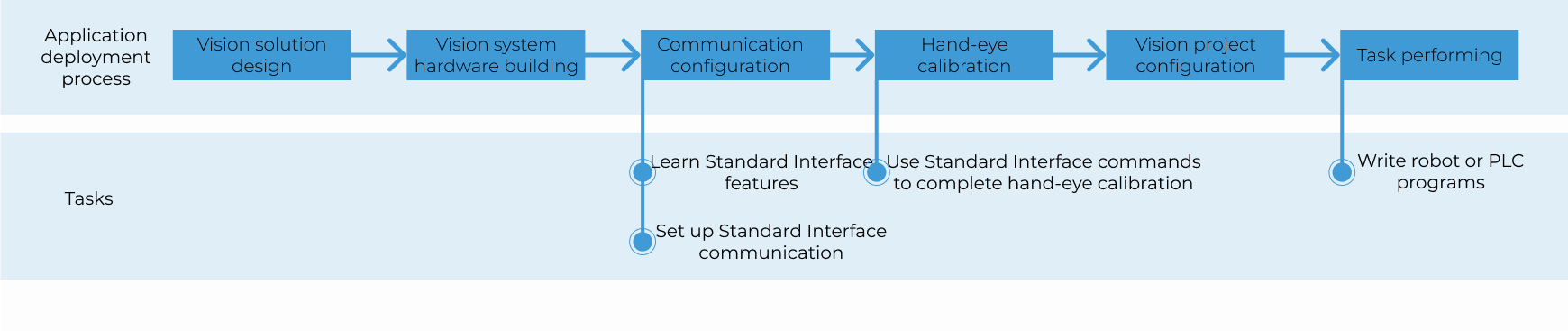
Après avoir appris les concepts de base de la communication via l’Interface Standard, réalisez les tâches de communication via l’Interface Standard dans le processus réel de déploiement d’application en fonction de vos exigences métier et de la marque de votre robot ou PLC.
| Ce manuel décrit uniquement les tâches de communication dans le processus de déploiement. Pour plus de détails sur les autres tâches du processus de déploiement, consultez Déploiement d’application documents. |
| Tâche | Description |
|---|---|
Découvrir les fonctionnalités de l’Interface Standard |
Consultez les descriptions des fonctionnalités de l’Interface Standard de votre robot ou PLC pour vous assurer que les fonctionnalités répondent à vos exigences. |
Configurer la communication via l’Interface Standard |
Assurez-vous que le robot ou le PLC peut communiquer avec le système de vision. |
Utiliser les commandes de l’Interface Standard pour effectuer l’étalonnage |
Établir la correspondance entre le système de coordonnées de la caméra et celui du robot. |
Écrire des programmes pour le robot ou le PLC |
Consultez les commandes de l’Interface Standard pour le robot ou le PLC, examinez les programmes d’exemple, puis écrivez des programmes pour le robot ou le PLC. Ces programmes obtiennent les informations sur l’objet ou la trajectoire de mouvement du robot depuis le système de vision et guident le robot pour effectuer les opérations en conséquence. |
|