Configuration de la communication et utilisation du programme d’exemple
Cette section fournit des instructions pour configurer la communication de l’Interface standard via Modbus TCP entre un PLC Inovance H5U ou série EASY (avec module Ethernet intégré) et le système de vision Mech-Mind.
Exigences matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Matériel
-
PLC Inovance H5U ou série EASY : module Ethernet intégré
Le modèle de PLC utilisé dans cet exemple est EASY320.
-
Adaptateur d’alimentation : 220 V AC vers 24 V DC
-
Un IPC et un ordinateur
-
Câble Ethernet (utilisé pour connecter l’IPC et le PLC)
Logiciel
| Logiciel | Description | Emplacement d’installation |
|---|---|---|
AutoShop V4.8.2.4 |
Logiciel PLC Inovance |
Ordinateur utilisé pour la programmation du PLC Inovance |
Mech-Vision et Mech-Viz |
Système de vision Mech-Mind |
IPC |
Outre les logiciels ci-dessus, copiez les fichiers d’exemple suivants sur l’ordinateur où AutoShop est installé. Les fichiers d’exemple sont stockés dans Communication Component/Robot_Interface/Modbus TCP/Inovance H5U&Easy dans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés.
-
Modbus_TCP_Configuration.xls : utilisé pour établir la communication via Modbus TCP/IP.
-
MM_Modbus_TCP_Interface_Program-v1.0.fe : utilisé pour implémenter les fonctions de diverses commandes d’interface.
-
MM_Modbus_TCP_Interface.csv et Camera_User.csv : utilisés pour importer les structures requises par les programmes d’exemple.
-
Variable_Table.csv : utilisé pour importer les variables requises par les programmes d’exemple.
| Le pare-feu sur l’IPC doit être désactivé. |
Configurer l’IPC et initier la communication
Définir l’adresse IP de l’IPC
-
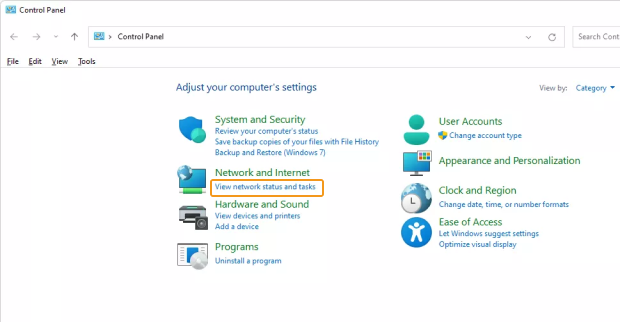
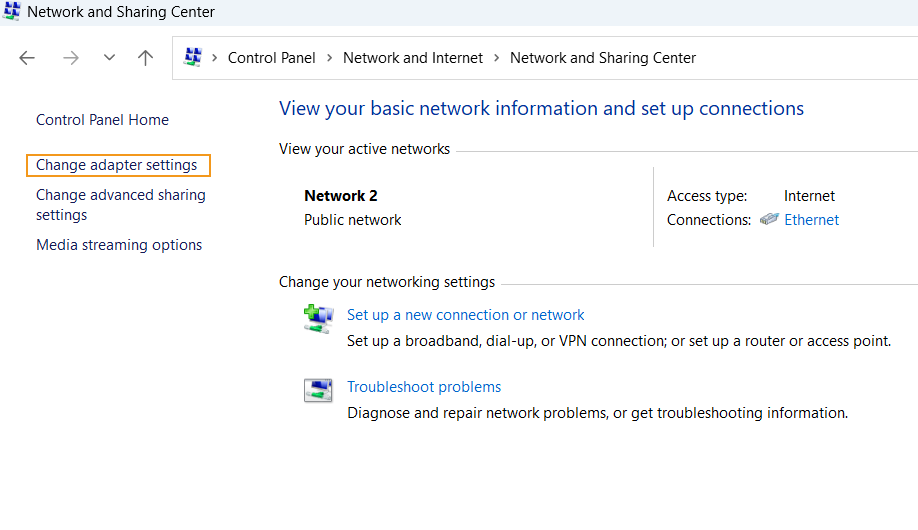
Ouvrez le Panneau de configuration, puis cliquez sur Afficher l’état et les tâches du réseau.
-
Dans la fenêtre « Centre Réseau et partage », cliquez sur Modifier les paramètres de la carte.
-
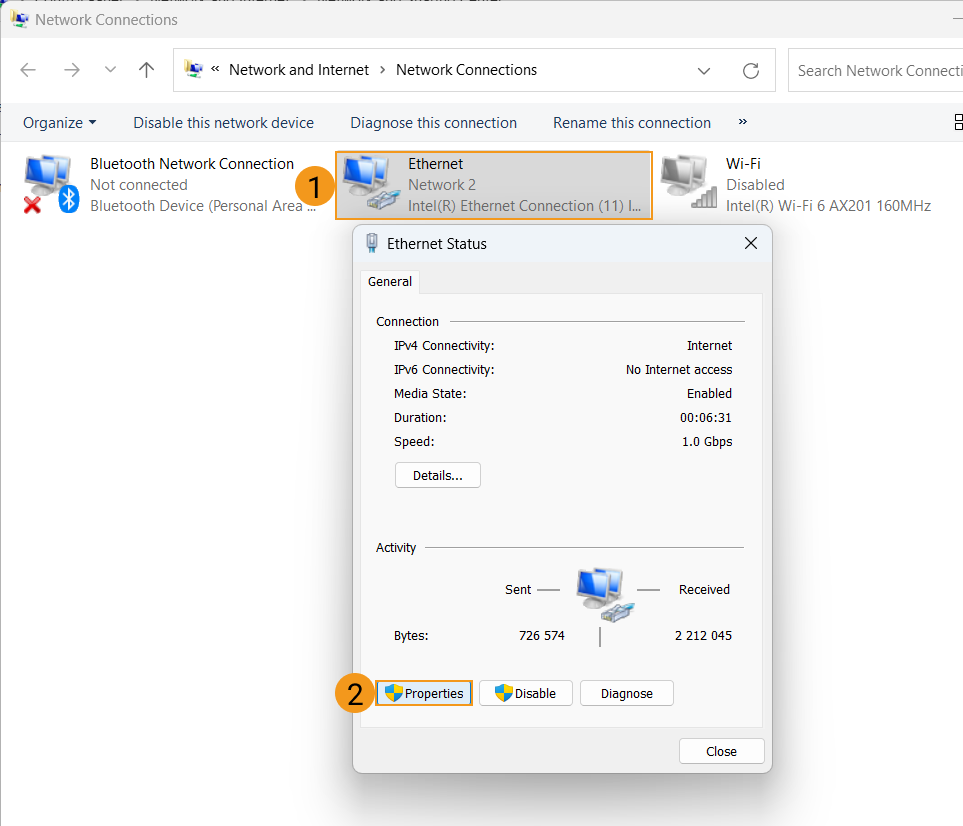
Dans la fenêtre « Connexions réseau », double-cliquez sur l’interface Ethernet connectée au PLC, puis sélectionnez Propriétés dans la fenêtre contextuelle État d’Ethernet.
-
Dans la fenêtre Propriétés Ethernet, sélectionnez Réseau dans la barre de menu, puis double-cliquez sur Internet Protocol Version 4 (TCP/IPv4).

-
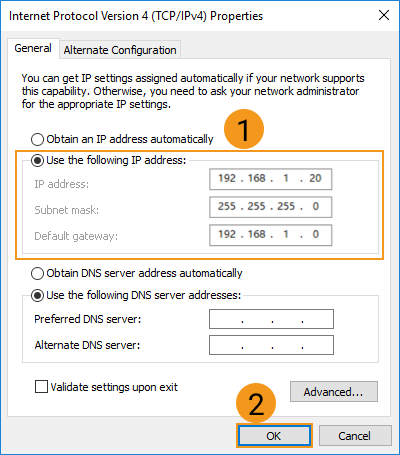
Dans la fenêtre Internet Protocol Version 4 (TCP/IPv4), sélectionnez « Utiliser l’adresse IP suivante », puis définissez l’adresse IP, le masque de sous-réseau et la passerelle par défaut (doit être dans le même sous-réseau que le PLC). Ensuite, cliquez sur « OK » pour enregistrer les modifications.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution en suivant les instructions ci-dessous.
-
Si vous êtes entré dans l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous êtes entré dans l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication robot, effectuez les configurations suivantes.
-
Cliquez sur la liste déroulante Sélectionner le robot, et choisissez soit Robot répertorié soit Robot personnalisé selon le robot utilisé dans votre projet. Cliquez ensuite sur Suivant.
-
Robot répertorié : Convient à la plupart des robots. Cliquez sur Sélectionner le modèle de robot pour choisir le modèle de robot spécifique.
-
Robot personnalisé : Convient aux robots portiques ou aux robots qui ne figurent pas dans la catégorie des robots répertoriés. Il faut sélectionner la Convention des angles d’Euler du robot et le système de coordonnées du robot.
-
-
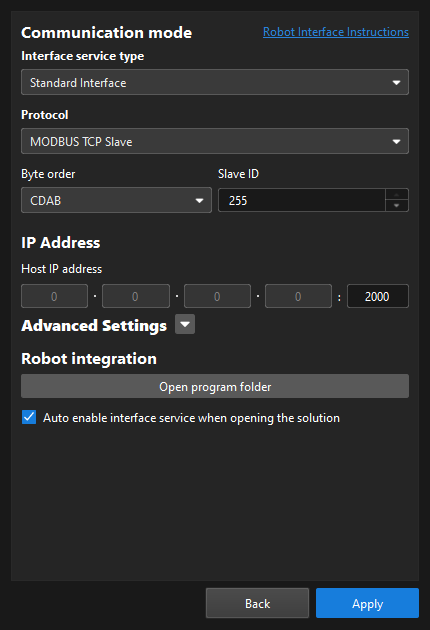
Dans la zone Mode de communication, sélectionnez Interface standard pour Type de service d’interface, MODBUS TCP Slave pour Protocole, et CDAB pour Ordre des octets. Définissez l'ID esclave sur 255.
-
Définissez le numéro de port sur 2000 pour l’adresse IP de l’hôte.
-
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que l’interrupteur Configuration de la communication robot dans la barre d’outils est basculé et devient bleu.

Créer et configurer le projet PLC
Créer un projet PLC
-
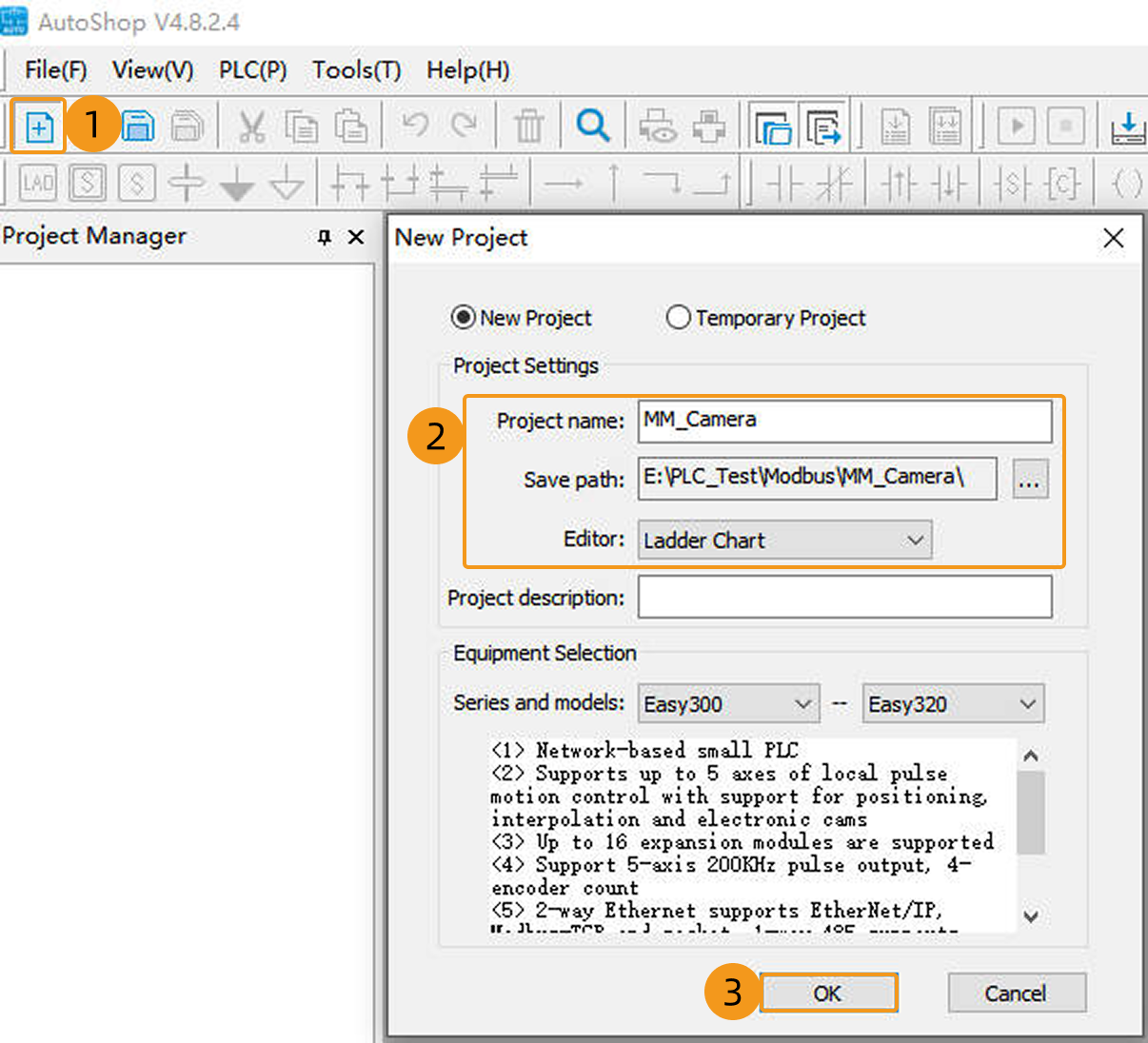
Ouvrez AutoShop et cliquez sur New Project dans la barre d’outils. Saisissez le nom du projet dans la fenêtre New Project, puis sélectionnez le chemin d’enregistrement. Sélectionnez Ladder Chart dans le menu déroulant de Editor. Cliquez sur OK.
-
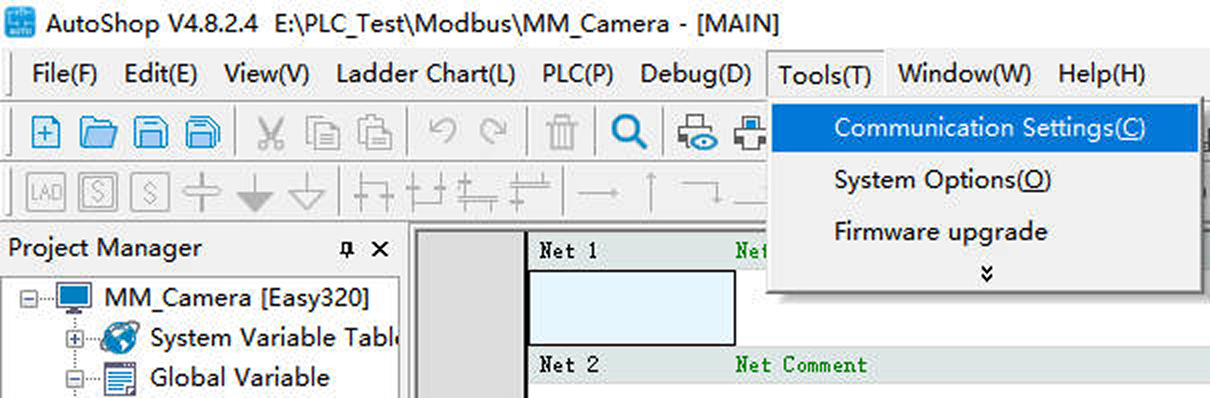
Cliquez sur dans la barre de menu.
-
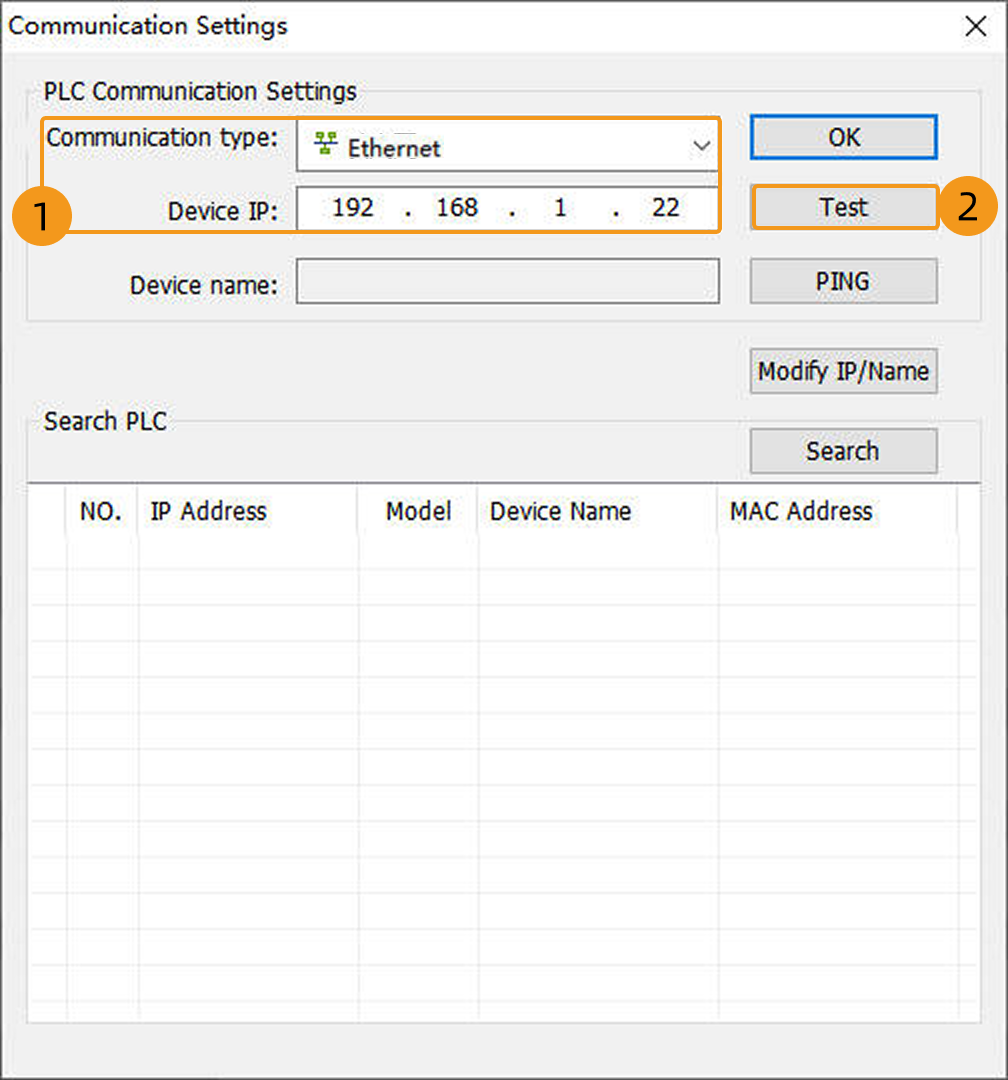
Dans la fenêtre suivante, sélectionnez Ethernet pour Communication type, puis saisissez l’adresse IP (dans cet exemple, 192.168.1.22) du PLC dans le champ Device IP. Cliquez sur Tester.
Si l’état de la connexion affiche Connected, cela indique qu’AutoShop a bien communiqué avec le PLC matériel. Cliquez ensuite sur OK pour revenir à la fenêtre logicielle AutoShop.
Configurer les paramètres de communication de Modbus TCP
-
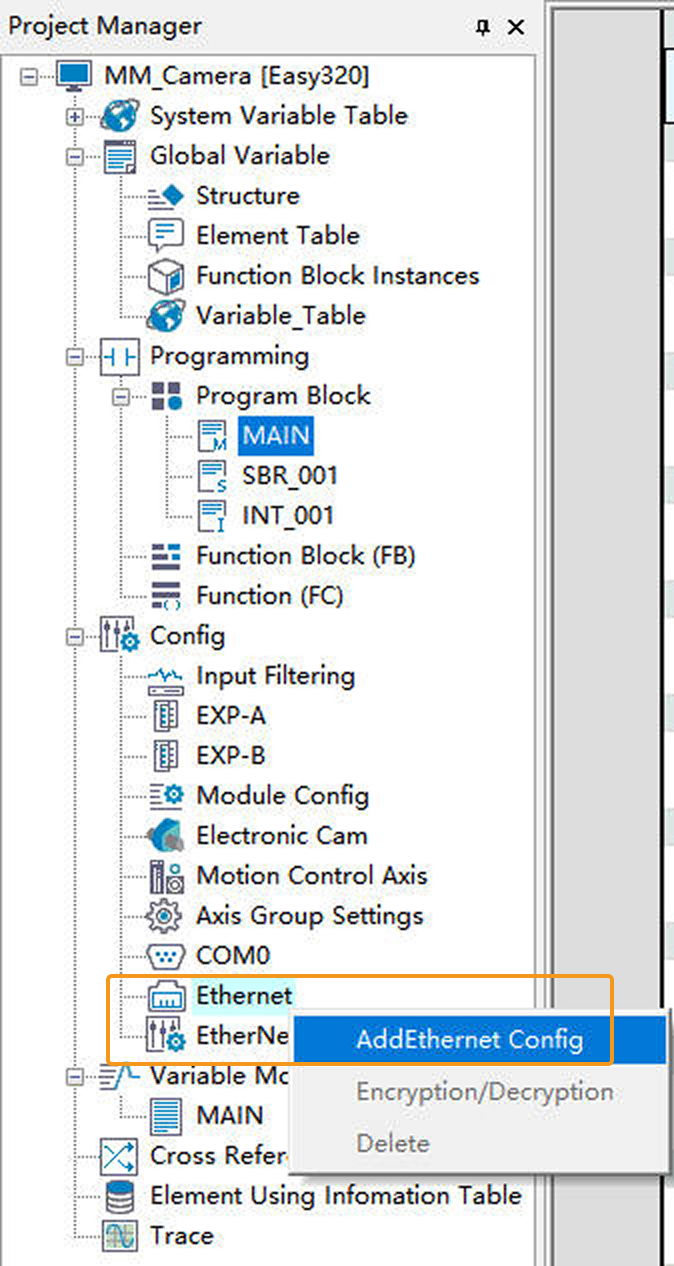
Dans le panneau Project Manager à gauche, accédez à Ethernet, cliquez avec le bouton droit sur Ethernet, puis sélectionnez Add Ethernet Config.
-
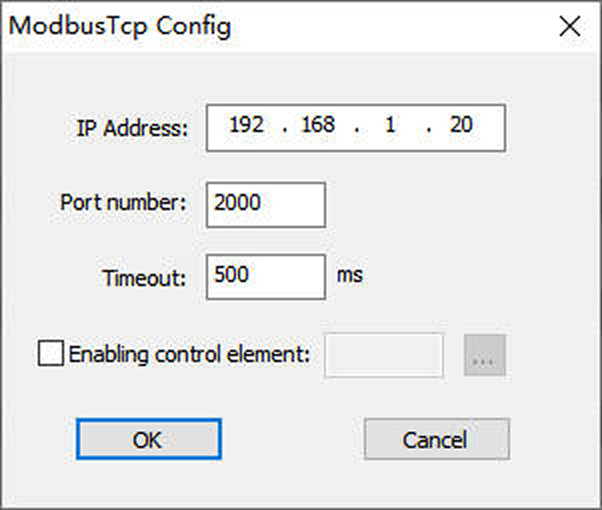
Dans la fenêtre suivante, saisissez l’adresse IP de l’IPC dans le champ IP Address (elle doit être dans le même sous-réseau que l’appareil PLC ; dans cet exemple, 192.168.1.20 est utilisée). Saisissez le numéro de port de service de l’IPC dans le champ Port Number (il doit correspondre au numéro de port hôte défini dans Mech-Vision ; dans cet exemple, 2000 est utilisé). Conservez les autres options par défaut, puis cliquez sur OK.
-
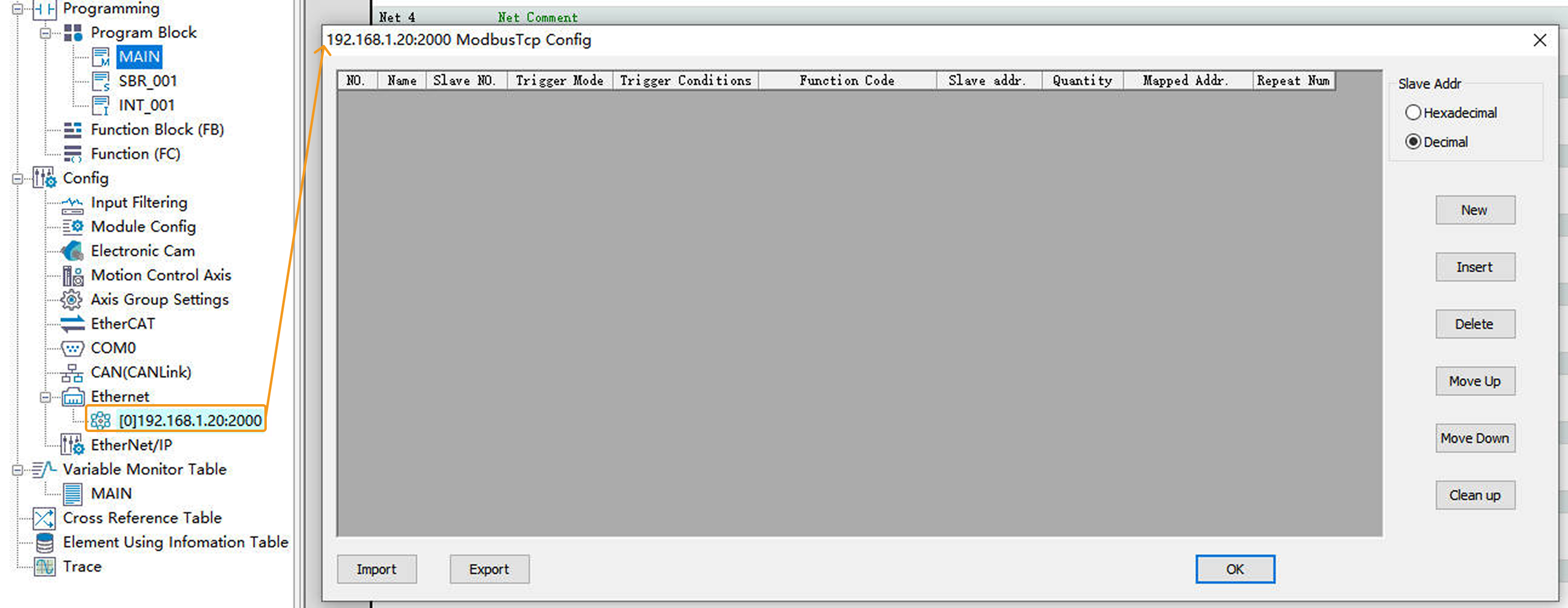
Double-cliquez sur la configuration Ethernet nouvellement ajoutée pour ouvrir la fenêtre ModbusTcp Config.
-
Dans la fenêtre suivante, cliquez sur Importer, localisez et sélectionnez le fichier Modbus_TCP_Configuration.xls, puis cliquez sur Ouvrir.
Le fichier Modbus_TCP_Configuration.xls est stocké dans Communication Component/Robot_Interface/Modbus TCP/Inovance H5U&Easydans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. L’utilisateur doit copier ce fichier de l’IPC vers l’ordinateur où AutoShop est installé au préalable.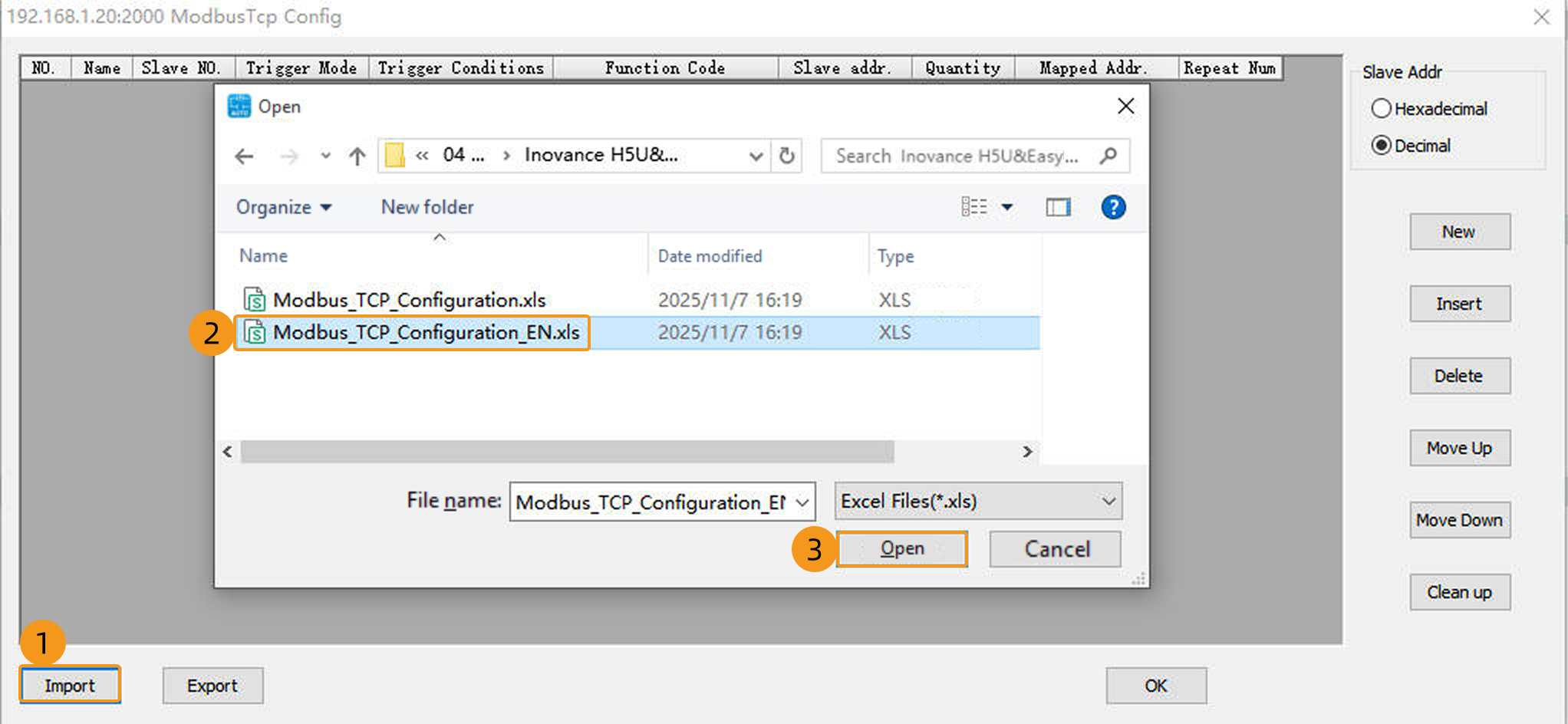
Si le fichier s’ouvre correctement, un message contextuel Import data successful! apparaîtra. Enfin, cliquez sur OK pour revenir à la fenêtre logicielle AutoShop.
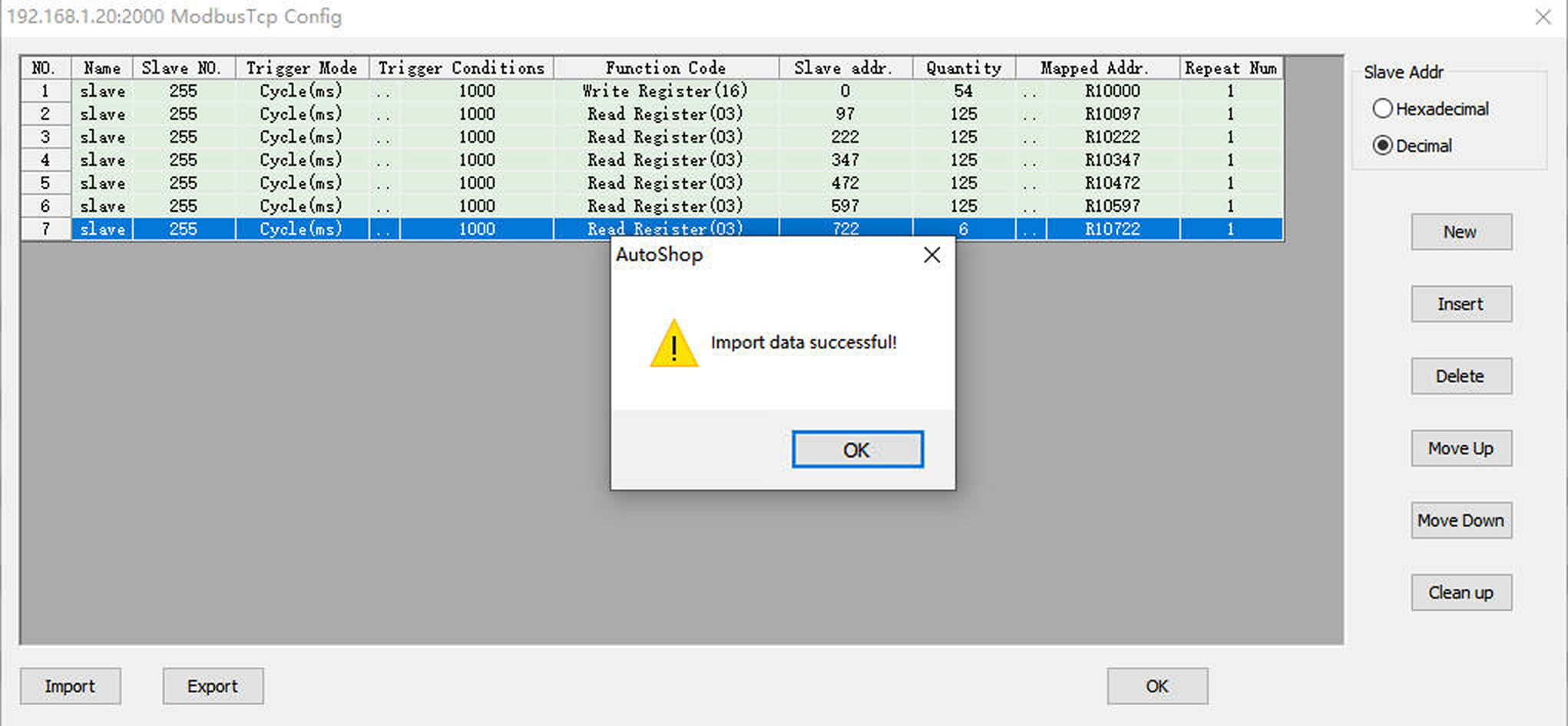
Dans la figure ci-dessus, le Slave NO. doit être cohérent avec l’adresse de l’esclave définie dans Mech-Vision. Dans cet exemple, les adresses de registre esclave (réservées) ne sont pas lues.
Importer les programmes d’exemple
| Avant d’ajouter un programme d’exemple à un projet déjà utilisé, il est recommandé de l’importer dans un nouveau projet et de le tester d’abord. |
-
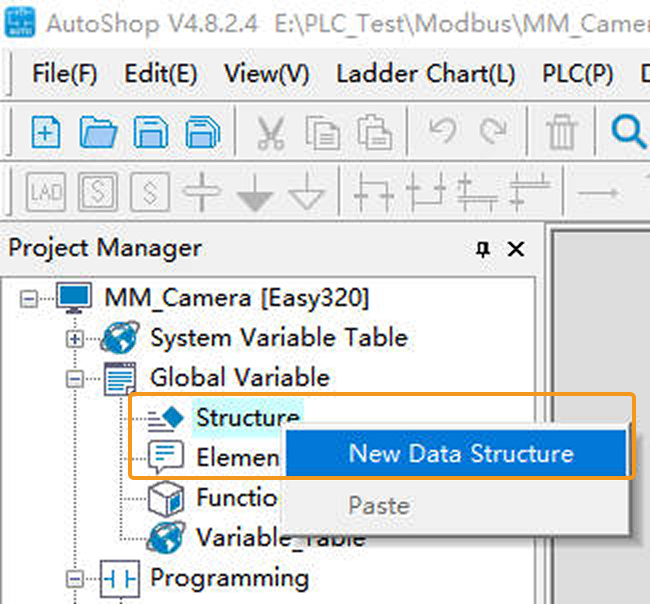
Dans le panneau Project Manager à gauche, cliquez avec le bouton droit sur Structure, puis sélectionnez New Data Structure.
Dans la fenêtre suivante, saisissez MM_Modbus_TCP_Interface dans le champ Name, puis cliquez sur OK. Le tableau de structure s’ouvrira automatiquement.
-
Dans le tableau de structure MM_Modbus_TCP_Interface, cliquez avec le bouton droit sur Import.
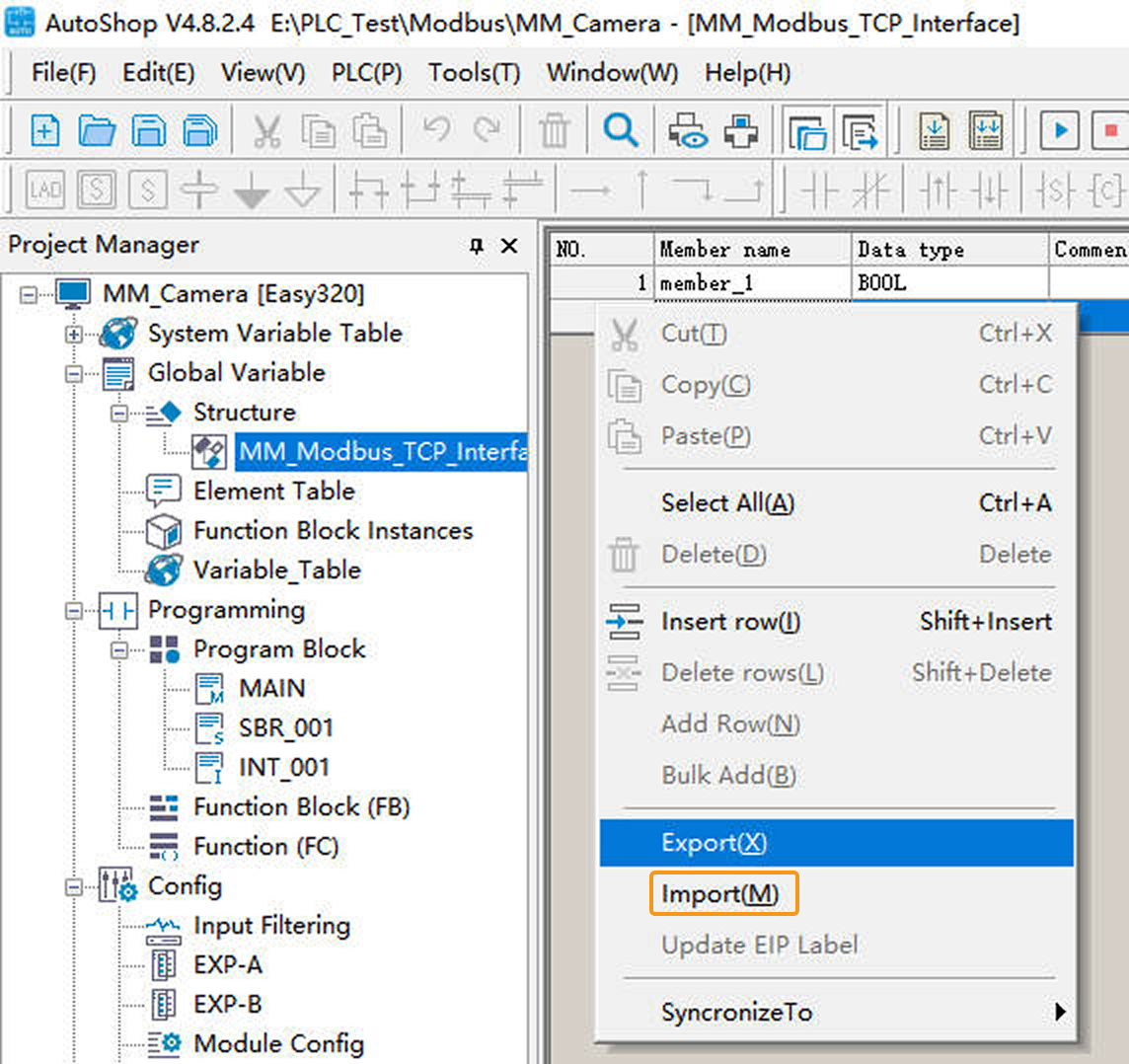
Localisez et sélectionnez le fichier MM_Modbus_TCP_Interface.csv, puis cliquez sur Ouvrir. Si le fichier s’ouvre correctement, un message contextuel Import data successful! apparaîtra. Enfin, cliquez sur OK pour revenir à la fenêtre logicielle AutoShop.
Le fichier MM_Modbus_TCP_Interface.csv est stocké dans Communication Component/Robot_Interface/Modbus TCP/Inovance H5U&Easydans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. L’utilisateur doit copier ce fichier de l’IPC vers l’ordinateur où AutoShop est installé au préalable.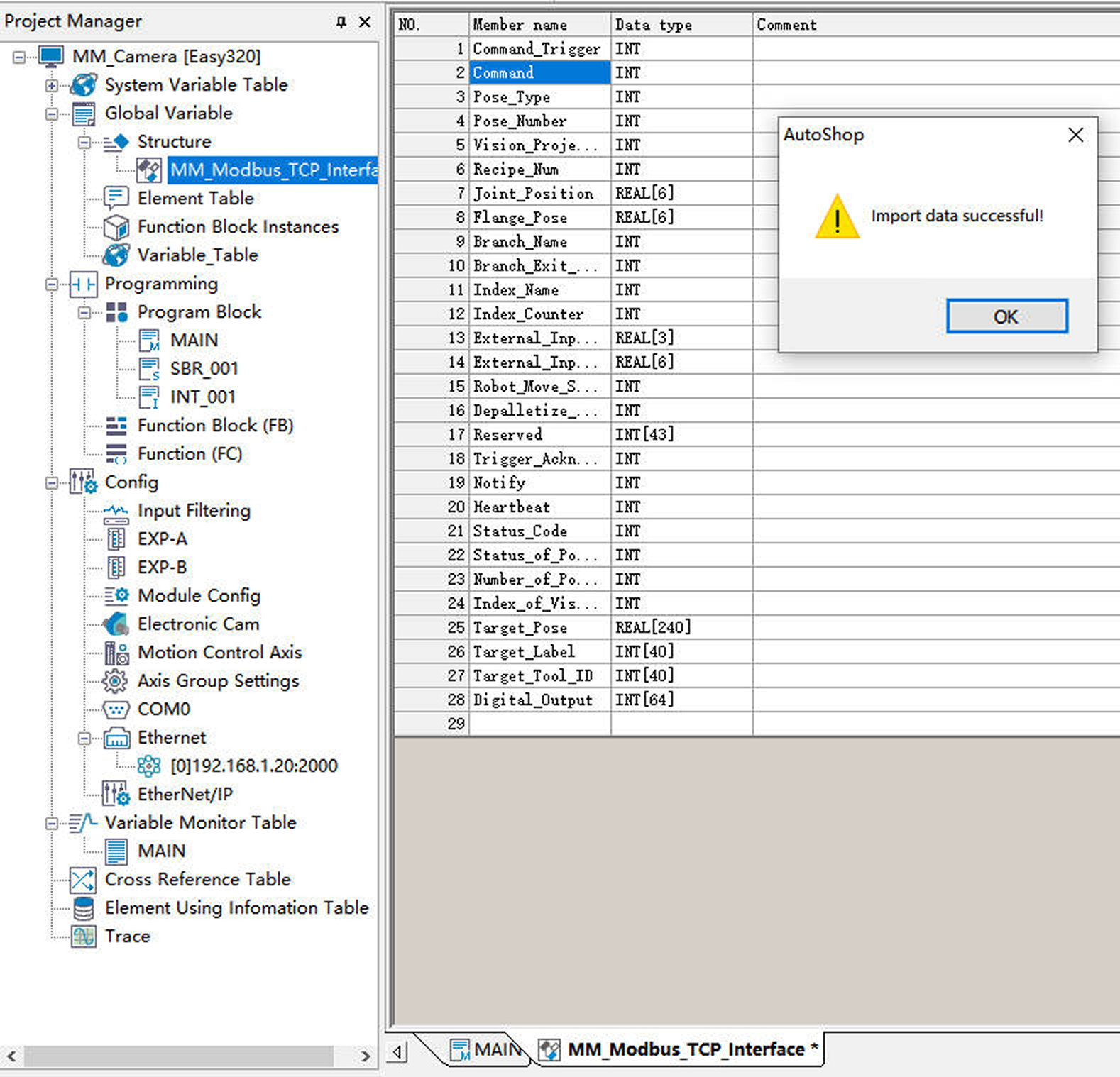
-
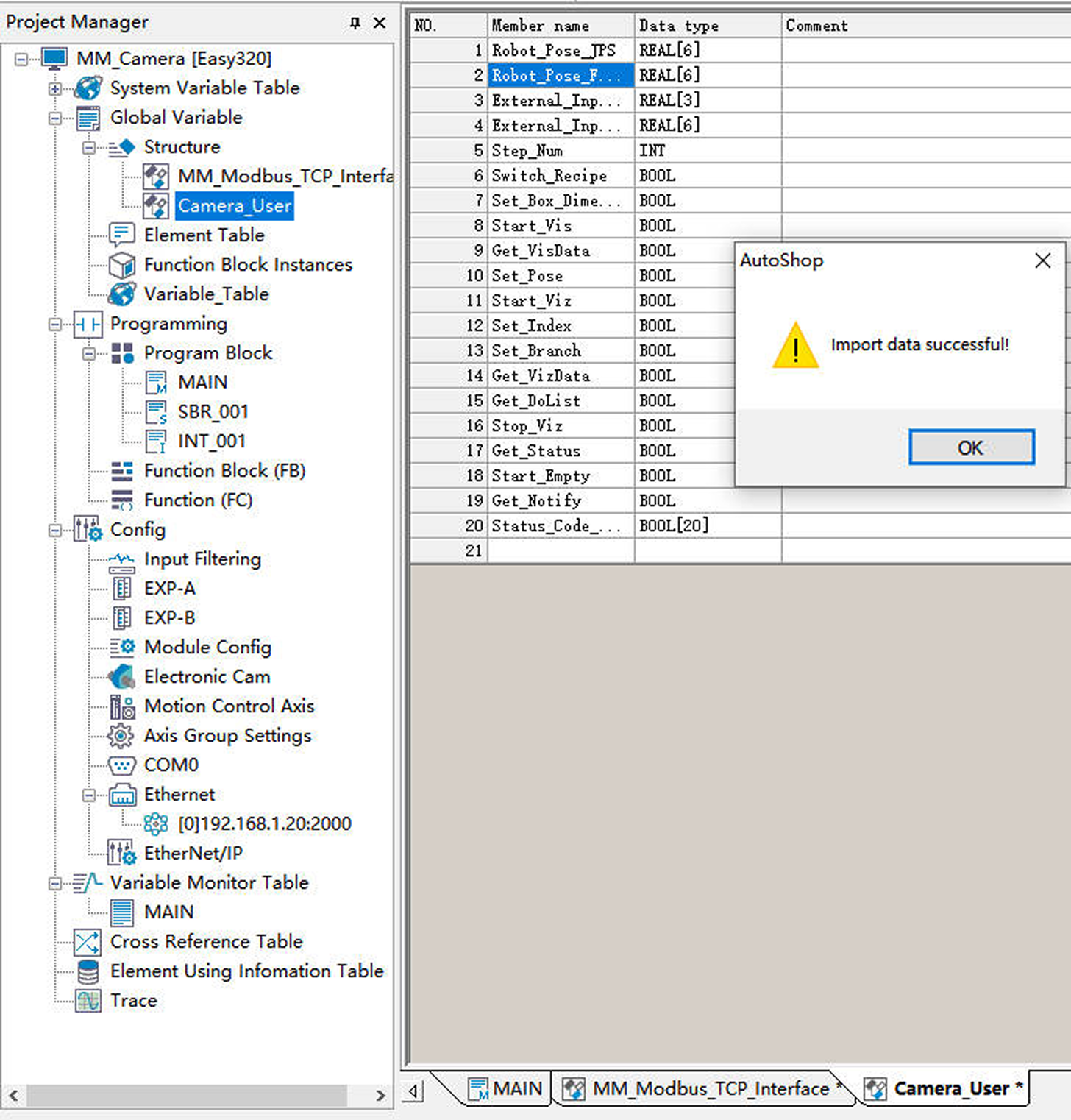
Répétez les étapes 1 et 2 ci-dessus pour créer une nouvelle structure nommée Camera_User et importer les données de ses variables membres.
-
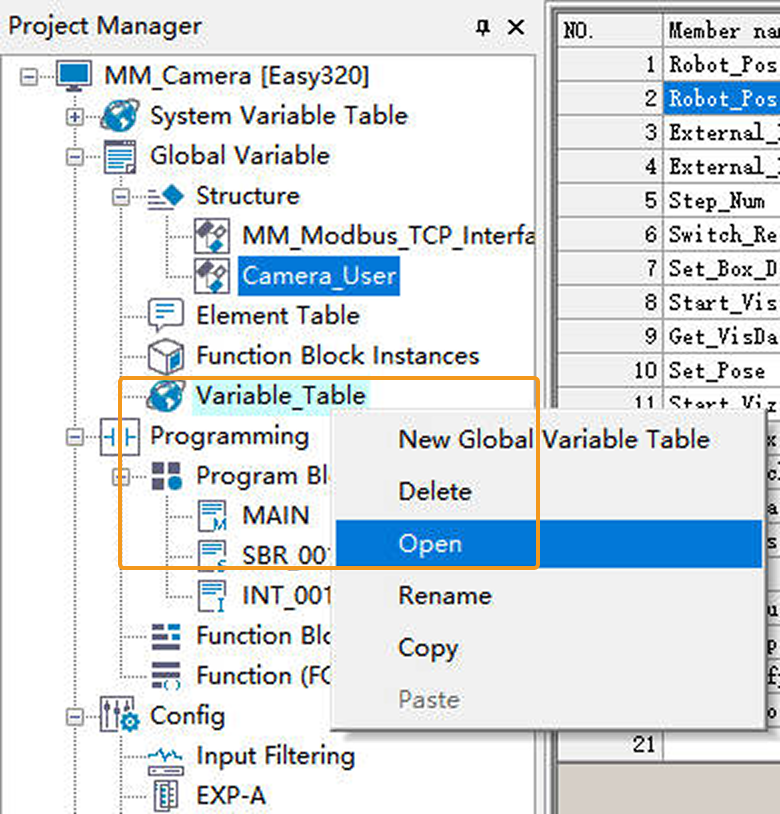
Dans le panneau Project Manager, cliquez avec le bouton droit sur Variable_Table et sélectionnez Open.
-
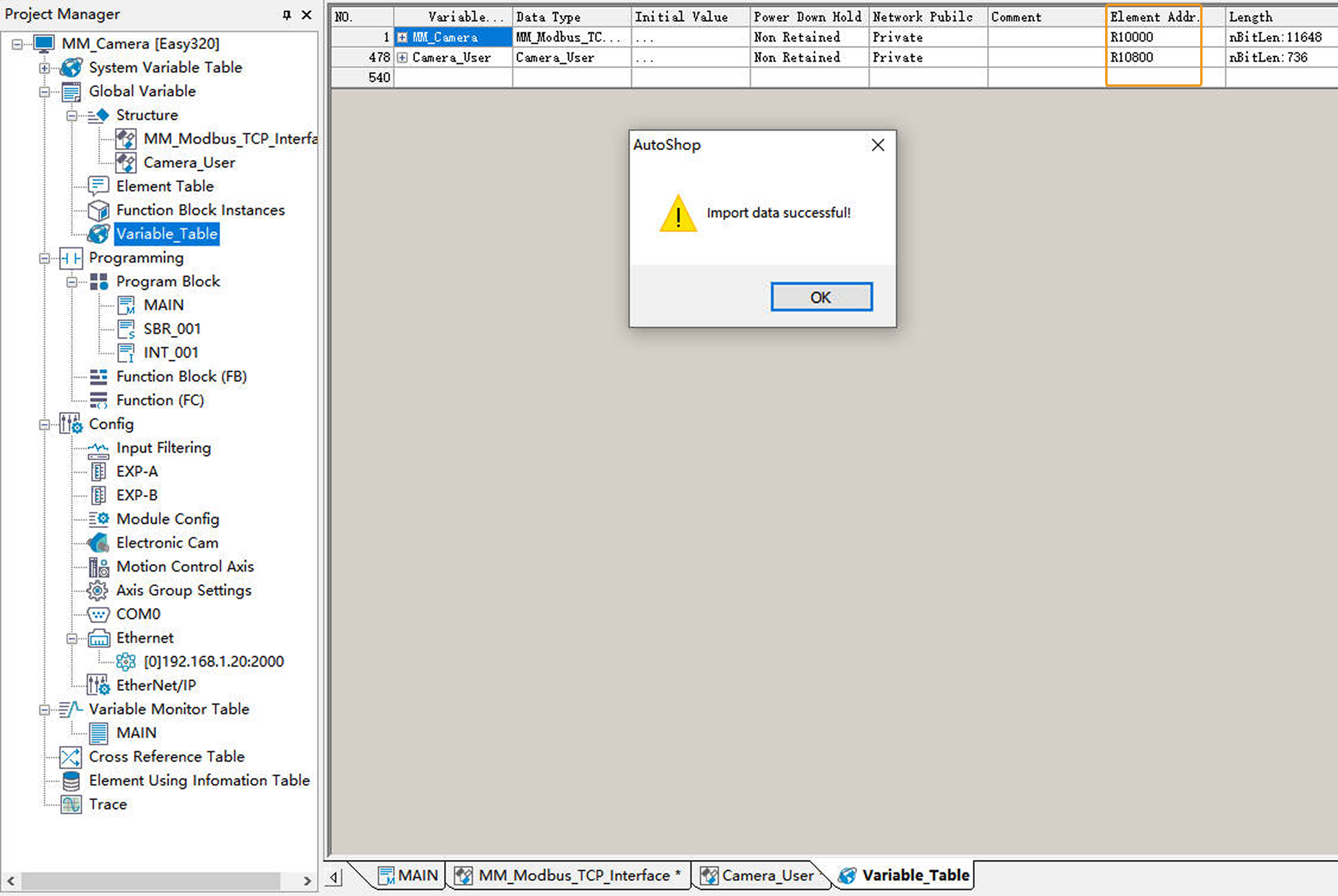
Dans le tableau des variables, cliquez avec le bouton droit sur Import.
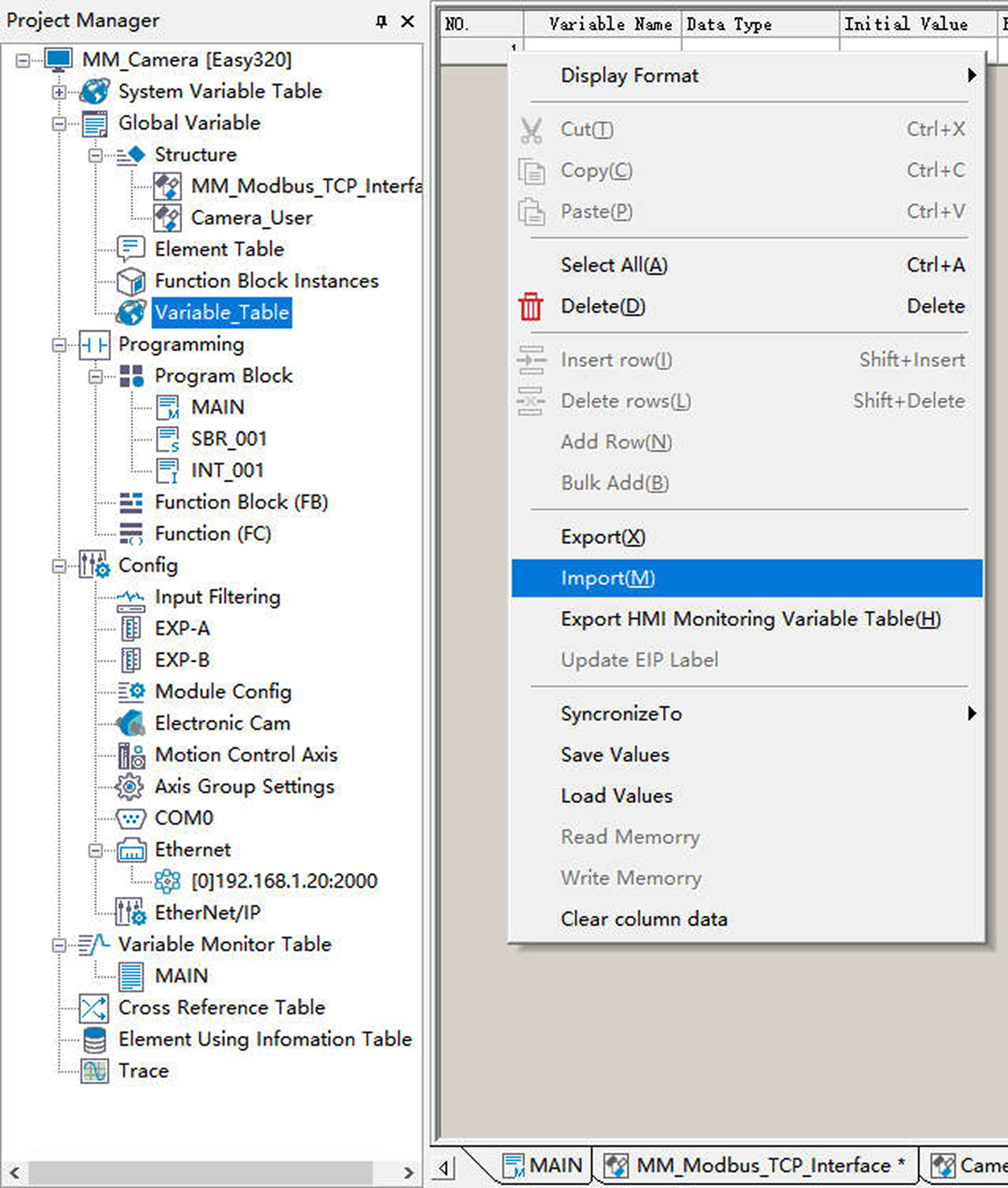
Localisez et sélectionnez le fichier Variable_Table.csv, puis cliquez sur Ouvrir.
Le fichier Variable_Table.csv est stocké dans Communication Component/Robot_Interface/Modbus TCP/Inovance H5U&Easydans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. L’utilisateur doit copier ce fichier de l’IPC vers l’ordinateur où AutoShop est installé au préalable.Si le fichier s’ouvre correctement, un message contextuel Import data successful! apparaîtra. Le Element Addr. ici doit correspondre au Mapped Addr. dans la fenêtre ModbusTcp Config de la section précédente. Enfin, cliquez sur OK pour revenir à la fenêtre logicielle AutoShop.
-
Dans le panneau Project Manager, cliquez avec le bouton droit sur Function (FC) et sélectionnez Import FC. Localisez et sélectionnez le fichier MM_Modbus_TCP_Interface_Program-v1.0.fe, puis cliquez sur Ouvrir.
Le fichier MM_Modbus_TCP_Interface_Program-v1.0.fe est stocké dans Communication Component/Robot_Interface/Modbus TCP/Inovance H5U&Easydans le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. L’utilisateur doit copier ce fichier de l’IPC vers l’ordinateur où AutoShop est installé au préalable.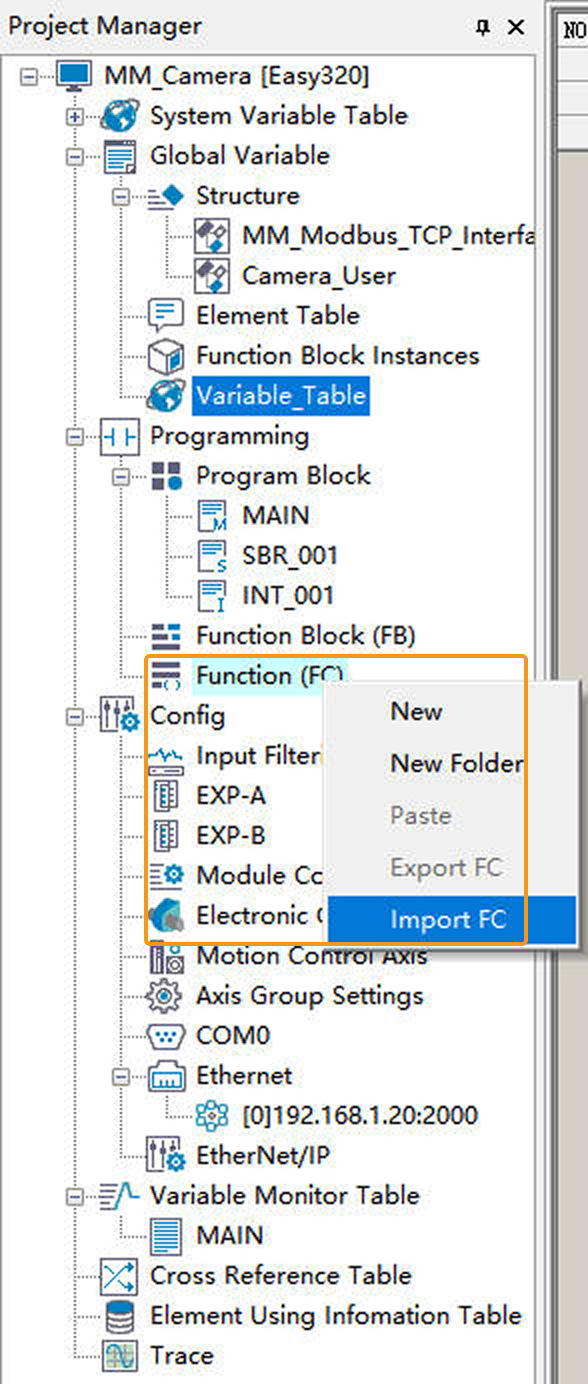
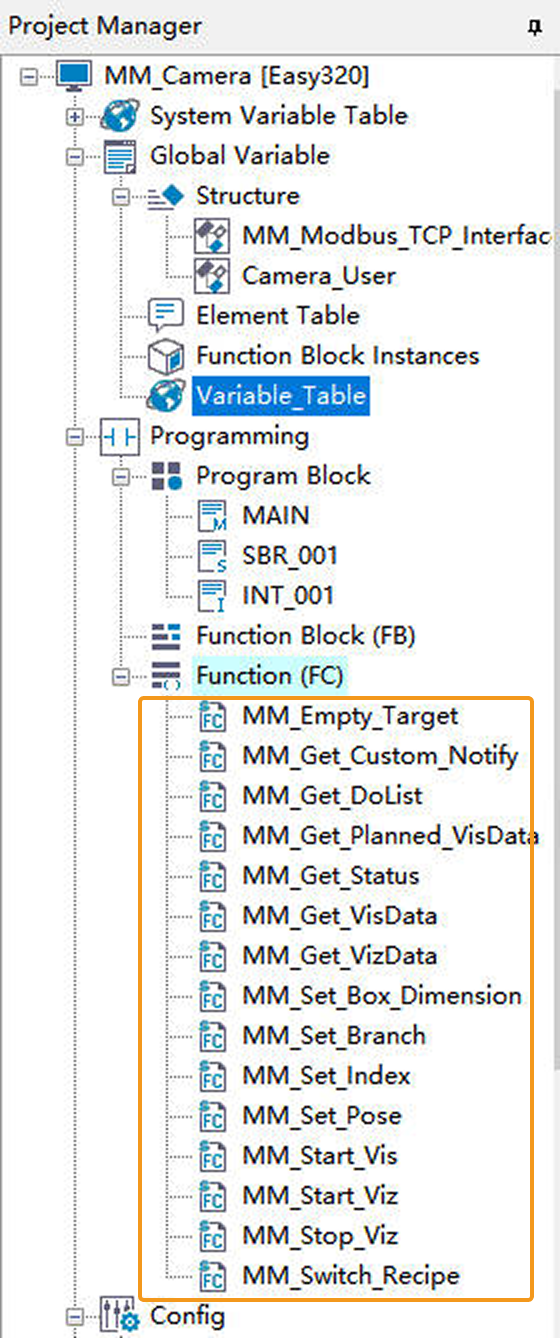
La fonction importée avec succès est illustrée dans la figure ci-dessous.
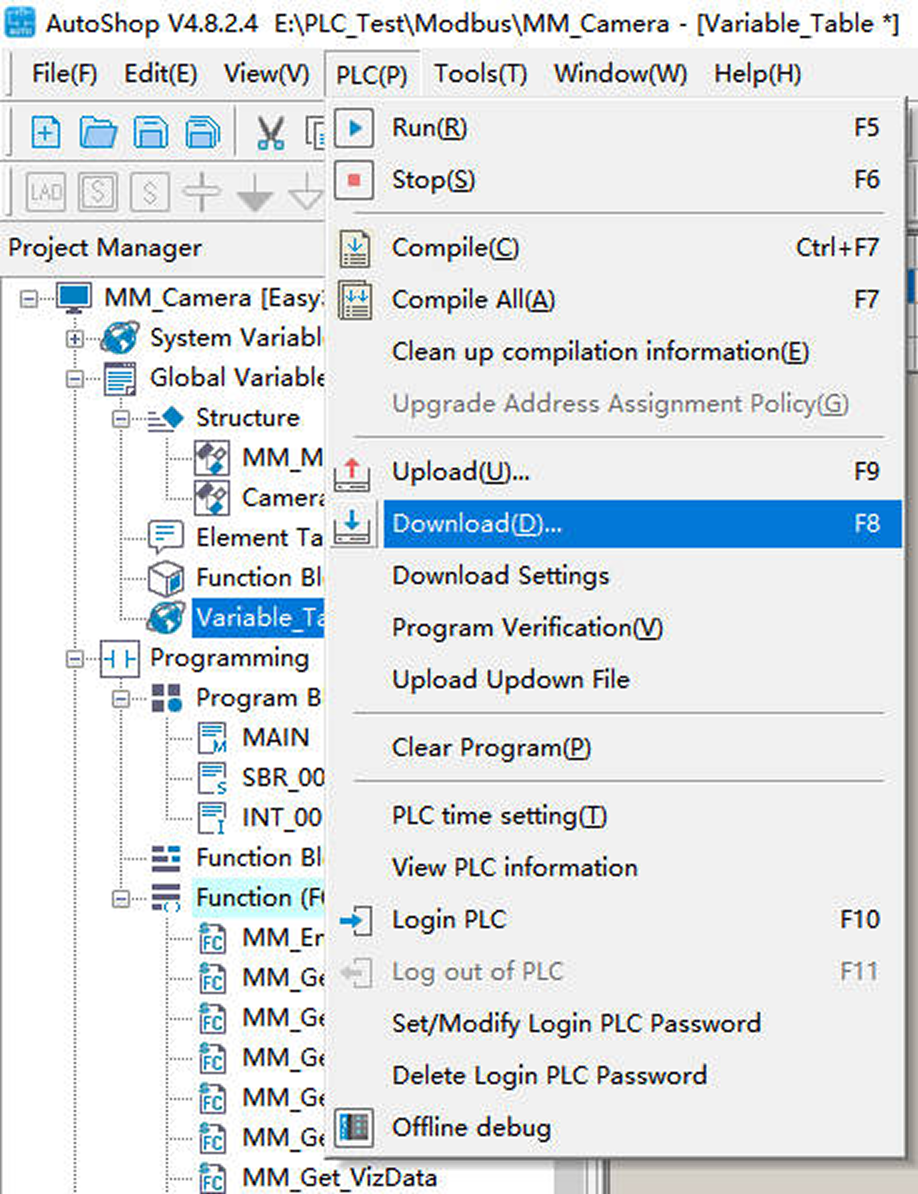
Télécharger la configuration de communication et les programmes d’exemple vers le PLC
-
Dans la barre de menu de la fenêtre logicielle AutoShop, cliquez sur .
-
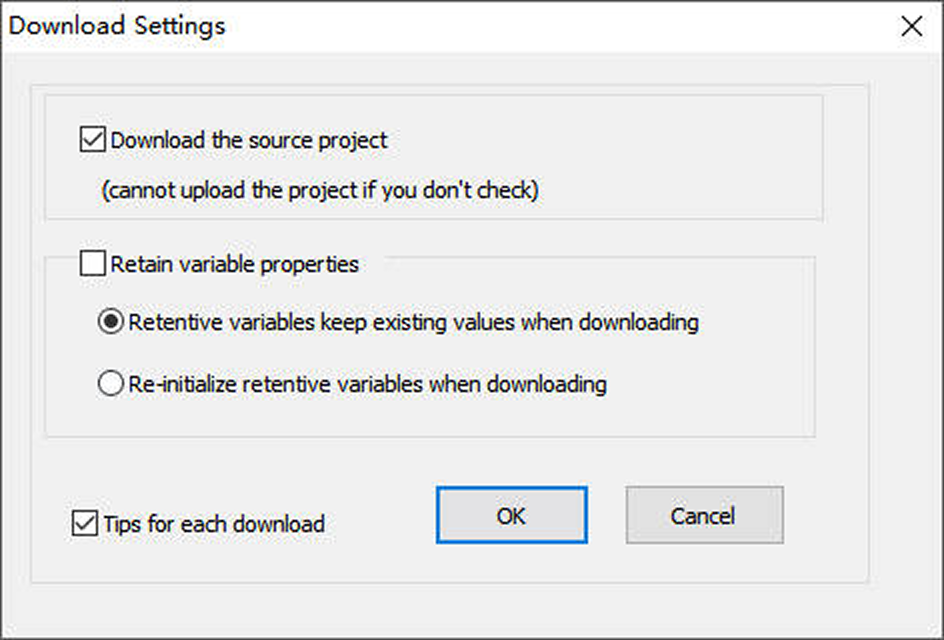
Dans la boîte de dialogue suivante, conservez les paramètres par défaut puis cliquez sur OK.
-
Dans la boîte de dialogue suivante, cliquez sur OK.
-
Une fois le projet téléchargé avec succès, la boîte de dialogue suivante apparaîtra. Après avoir vérifié la sécurité, cliquez sur OK.
Vérifier la communication
-
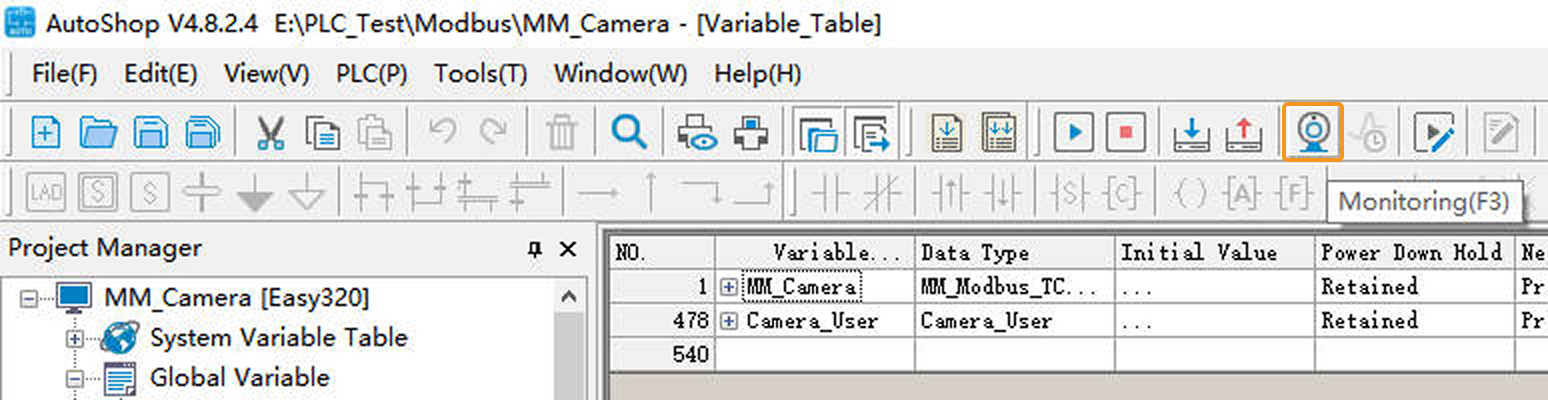
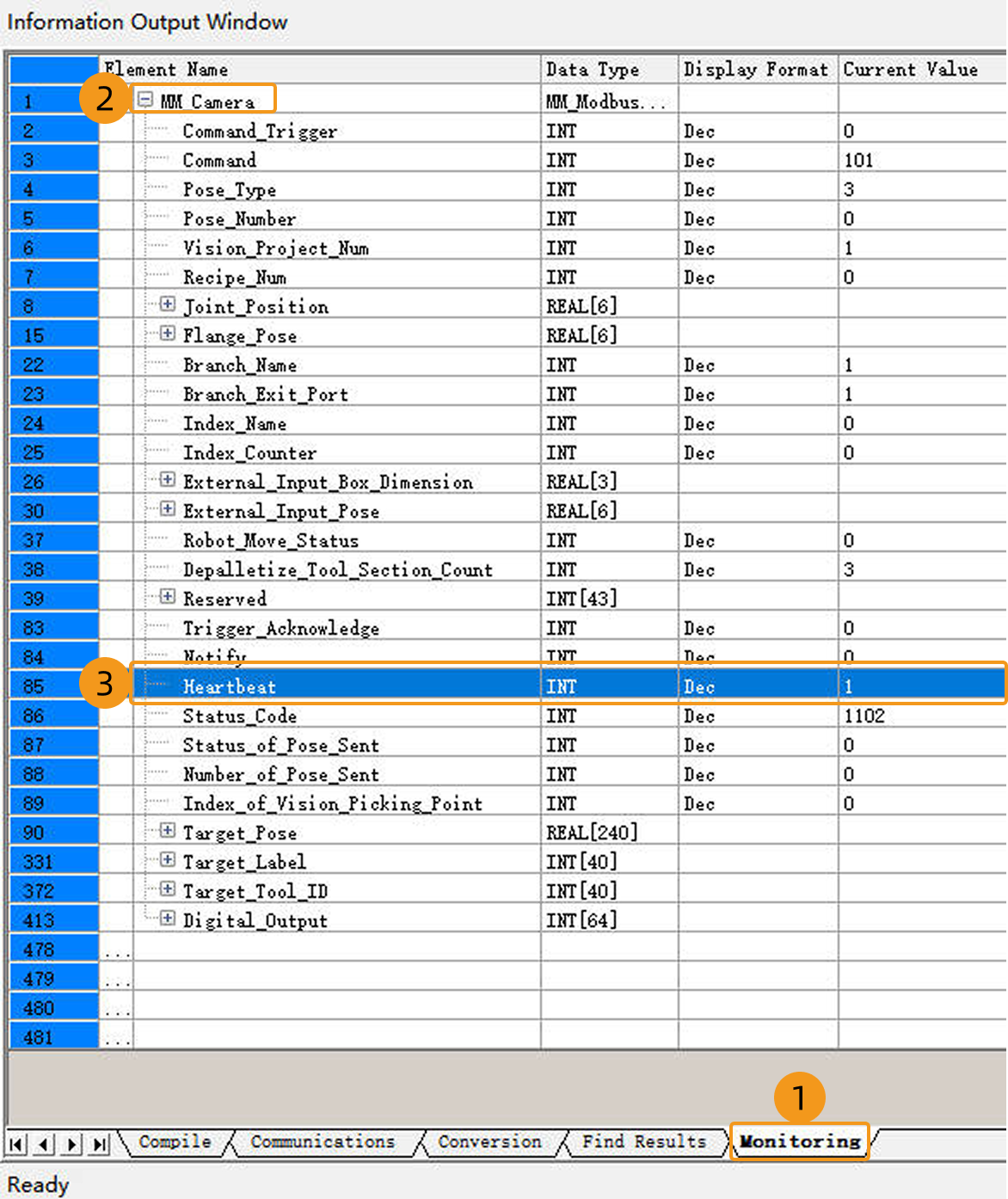
Dans la barre d’outils du logiciel AutoShop, cliquez sur l’icône Monitoring. Dans la boîte de dialogue qui s’affiche, cliquez sur Oui.
-
Dans la fenêtre suivante, cliquez sur l’onglet Monitoring et ajoutez la variable MM_Camera. Si la connexion est établie avec succès, la valeur actuelle de Heartbeat changera en continu.
-
Si la connexion réussit, un message indiquant une connexion réussie à l’esclave Modbus TCP apparaîtra dans l’onglet Console du panneau de journal de la fenêtre principale de Mech-Vision.
Si vous ne voyez pas ce message de journal, veuillez vérifier si :
-
La connexion réseau matérielle est normale.
-
L’option Robot Communication Configuration dans la barre d’outils de Mech-Vision est activée.
-
Le programme PLC est téléchargé vers le PLC.
-
Test avec un projet Mech-Vision/Mech-Viz
Cette section présente comment utiliser le FB de programme d’exemple pour déclencher l’exécution du projet Mech-Vision et obtenir le résultat de vision, ainsi que pour déclencher le projet Mech-Viz et obtenir la trajectoire planifiée.
Préparation
-
Revenez à Mech-Vision et créez un projet Mech-Vision. Dans la section Project List de Mech-Vision, cliquez avec le bouton droit sur la solution et sélectionnez Autoload Solution. Les projets de la solution sont également chargés automatiquement. Par ailleurs, l’ID de projet s’affiche devant chaque nom de projet.
-
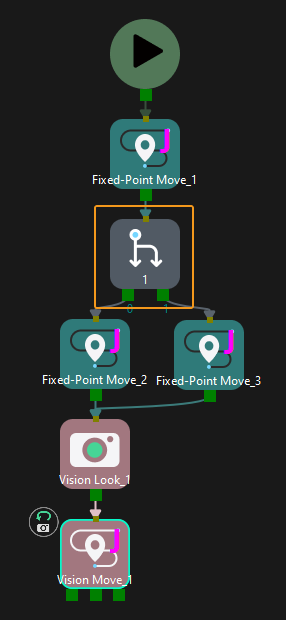
Créez un projet Mech-Viz. Cliquez avec le bouton droit sur le nom du projet dans le panneau des ressources de projet de Mech-Viz et sélectionnez Autoload Project. Le projet Mech-Viz utilisé pour les tests doit contenir une étape « Branch by Msg » qui a été renommée en 1 comme illustré ci-dessous.
Obtenir le résultat de vision depuis Mech-Vision
Paramétrage
-
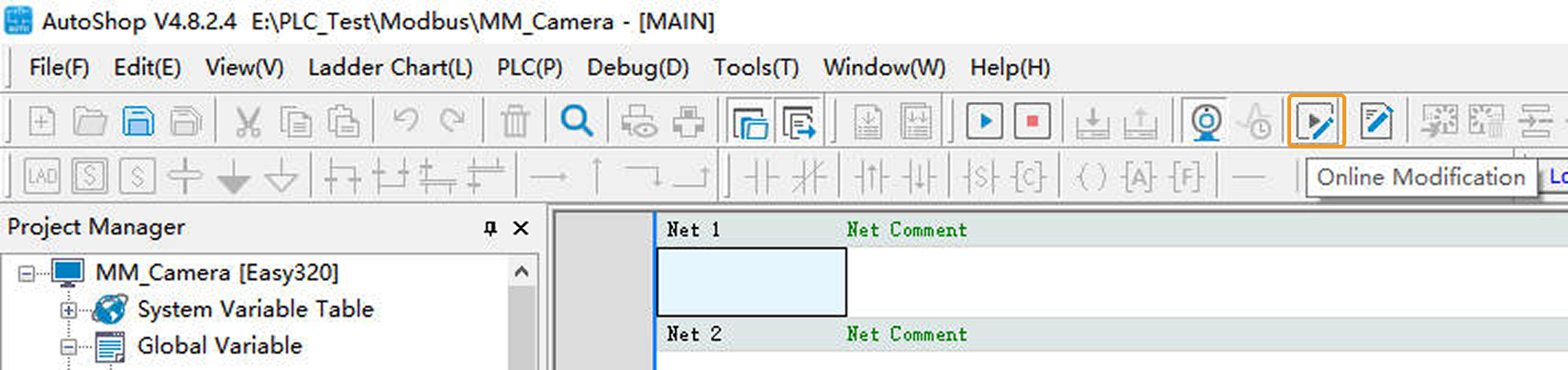
Dans la barre d’outils du logiciel AutoShop, cliquez sur l’icône Online Modification.
-
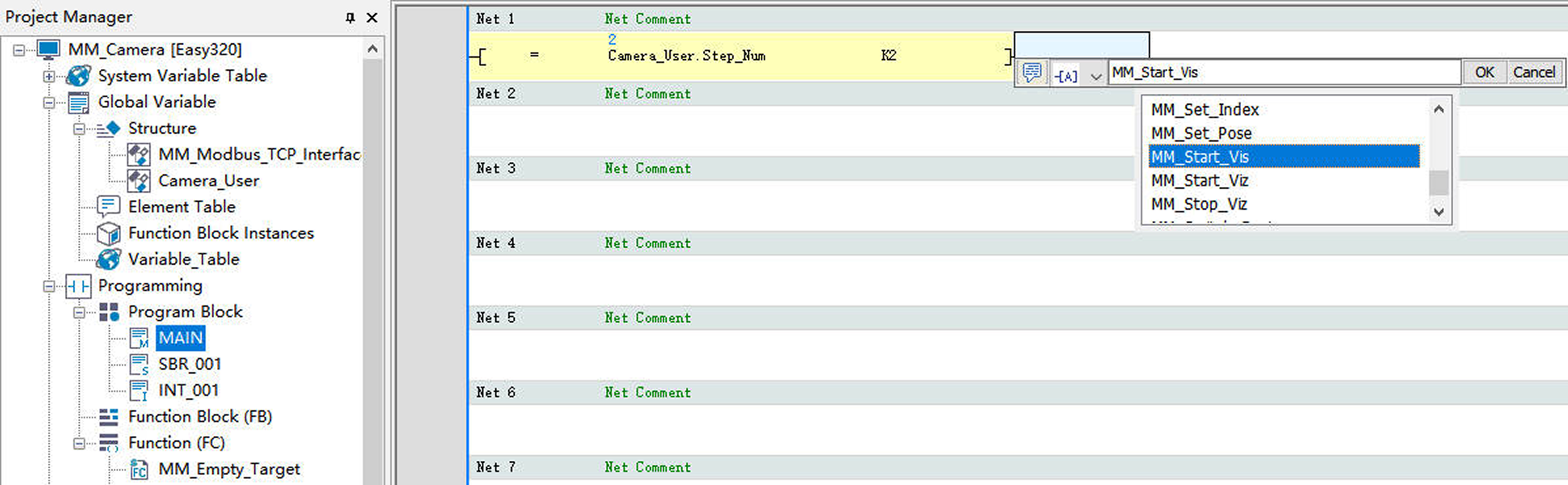
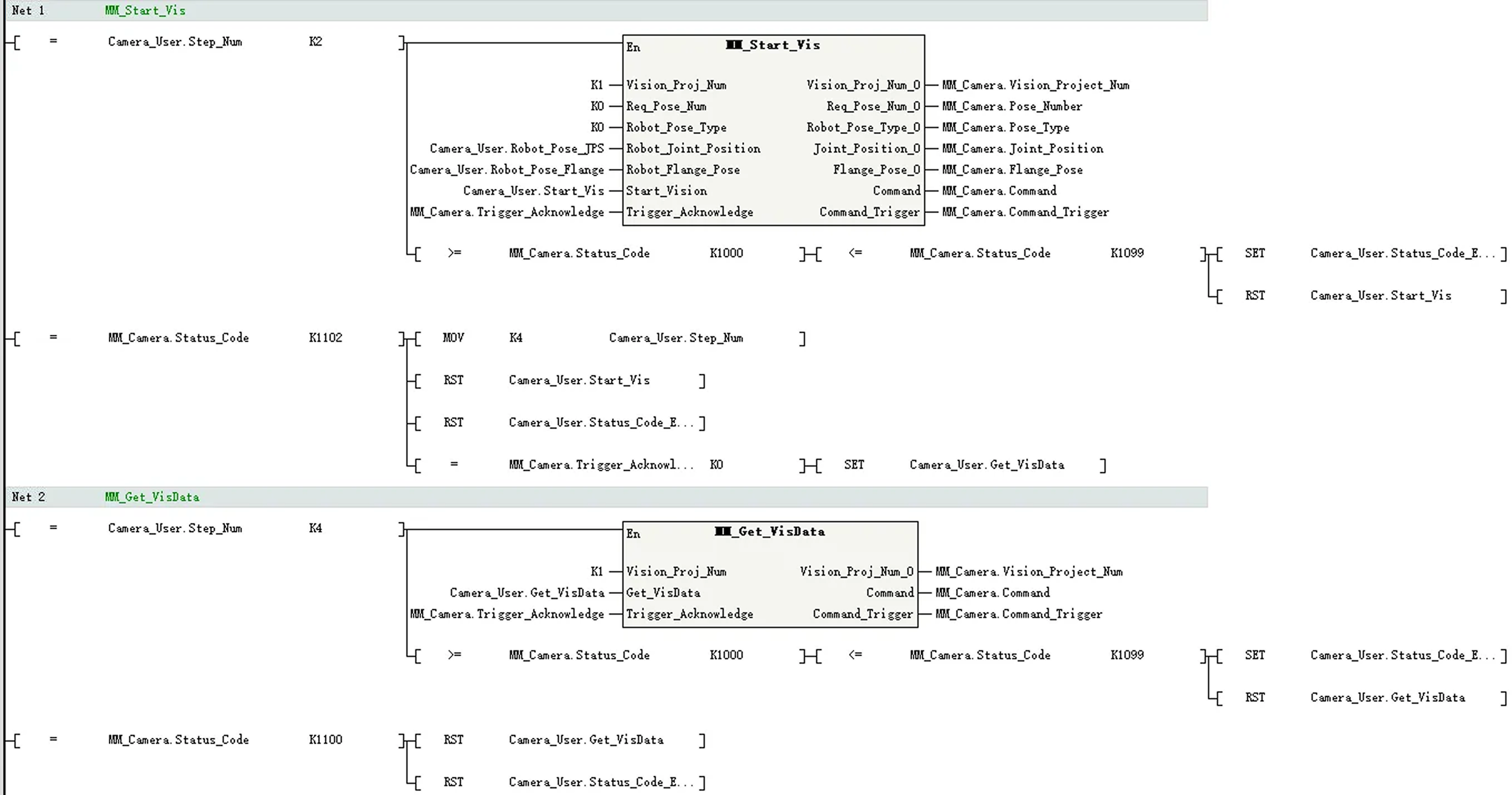
Dans le panneau Project Manager, double-cliquez sur MAIN. Dans Net 1, saisissez la commande de comparaison LD= Camera_User.Step_Num K2. Appliquez ensuite la commande MM_Start_Vis.

-
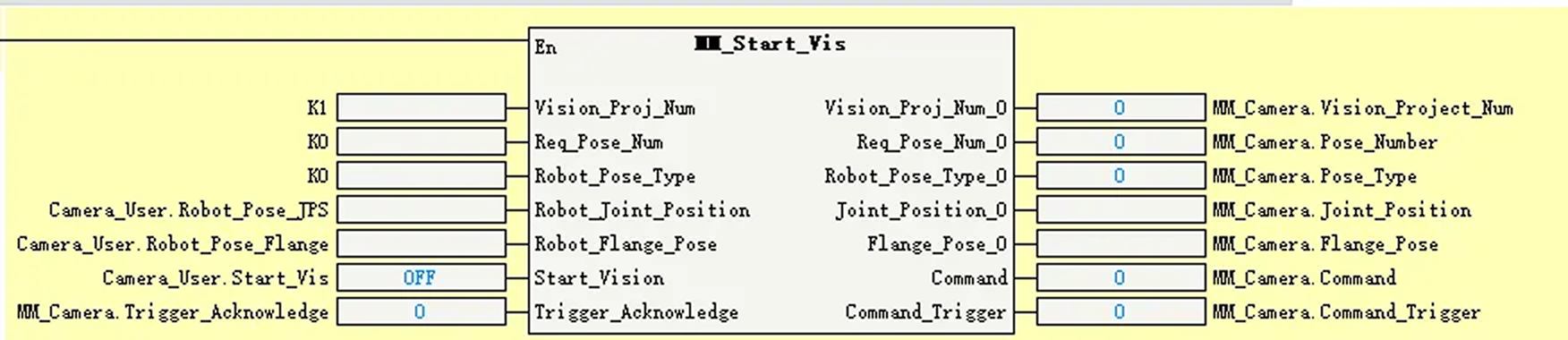
Configurez les ports d’entrée et de sortie de MM_Start_Vis comme indiqué dans la figure ci-dessous.
-
Définissez la valeur de Vision_Proj_Num sur 1. Le projet n° 1 dans Mech-Vision sera alors démarré.
-
Définissez la valeur de Req_Pose_Num sur 0. Mech-Vision renverra alors tous les points de vision.
-
Définissez la valeur de Robot_Pose_Type sur 0. La pose de prise de vue n’a alors pas besoin d’être envoyée au projet Mech-Vision. Par exemple, la pose de prise de vue n’a pas besoin d’être envoyée lorsque la caméra est montée en mode œil-vers-main.
-
Ajoutez les variables correspondantes aux ports restants comme indiqué dans la figure ci-dessous.
-
-
Dans Net 2, saisissez la commande de comparaison LD= Camera_User.Step_Num K4. Appliquez ensuite la commande MM_Get_VisData.

-
Configurez les ports d’entrée et de sortie de MM_Get_VisData comme indiqué dans la figure ci-dessous.
-
Définissez la valeur du port Vision_Proj_Num sur 1, indiquant que les résultats de vision du projet 1 de Mech-Vision seront récupérés.
-
Ajoutez les variables correspondantes aux ports restants comme indiqué dans la figure ci-dessous.

-
-
Dans la barre d’outils, cliquez sur l’icône Download.

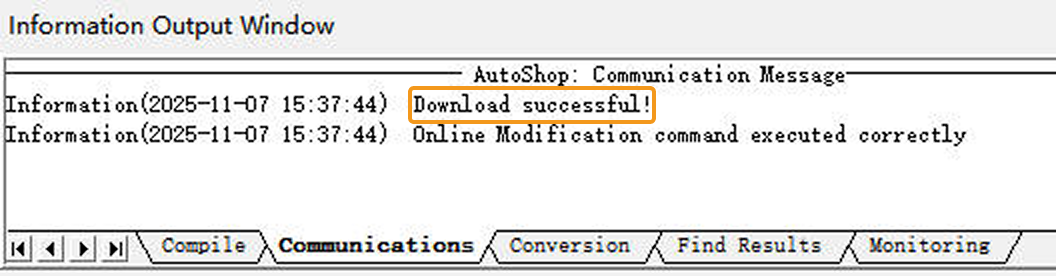
-
Dans Information Output Window, cliquez sur l’onglet Communications. Si le téléchargement réussit, un message Download successful s’affiche ici.
Exécuter le projet Mech-Vision
-
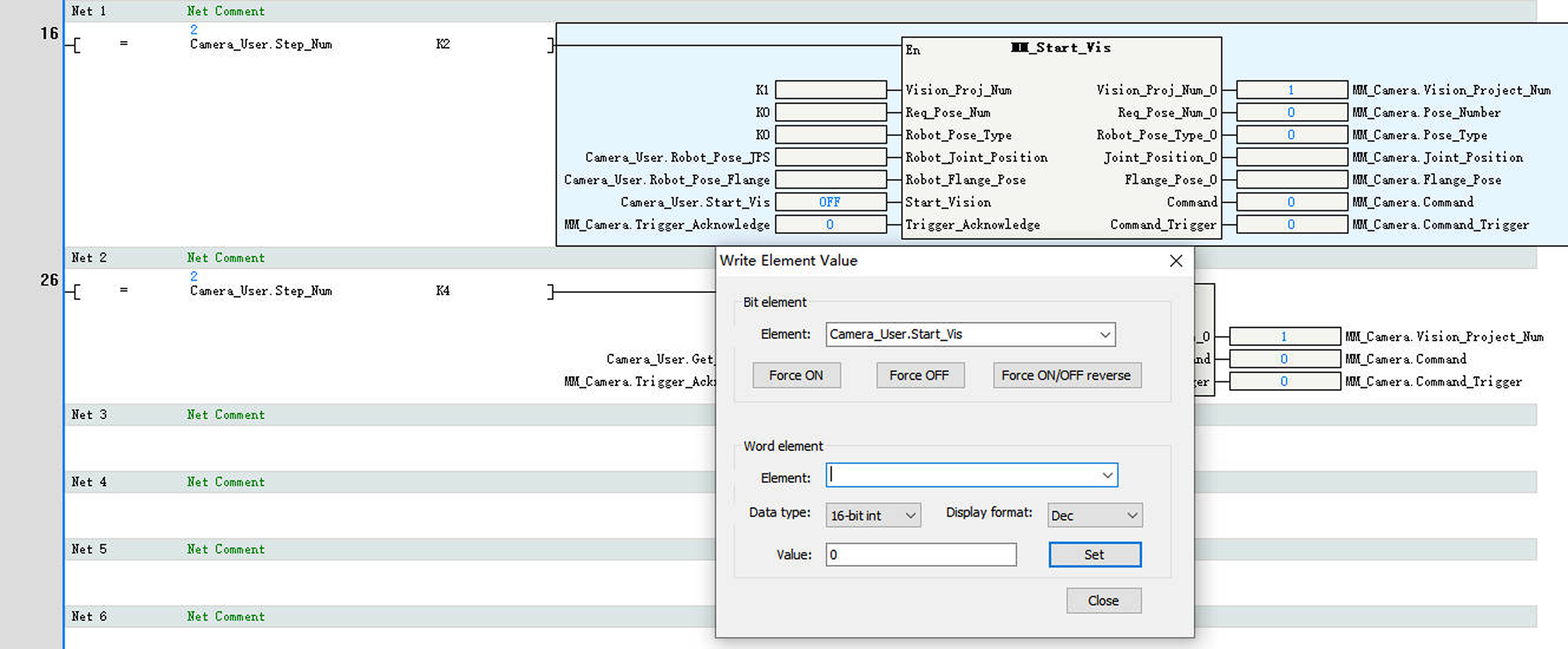
Dans la barre d’outils du logiciel AutoShop, cliquez sur l’icône Write.

-
Dans la boîte de dialogue Write Element Value, effectuez les opérations suivantes:
-
Sous Word Element, sélectionnez Camera_User.Step_Num pour Element, définissez Value sur 2, puis cliquez sur Définir pour activer la fonction MM_Start_Vis.
-
Sous Bit Element, sélectionnez Camera_User.Start_Vis pour Element, cliquez sur Forcer ON pour déclencher le projet Mech-Vision. Cliquez ensuite sur Forcer OFF pour réinitialiser Camera_User.Start_Vis.
-
-
Dans Information Output Window, cliquez sur l’onglet Monitoring. Si la valeur de Status_Code est 1102, cela indique que le projet Mech-Vision a été déclenché avec succès.
Si 10XX s’affiche pour Status_Code, reportez-vous à Codes d’état et dépannage pour le dépannage. 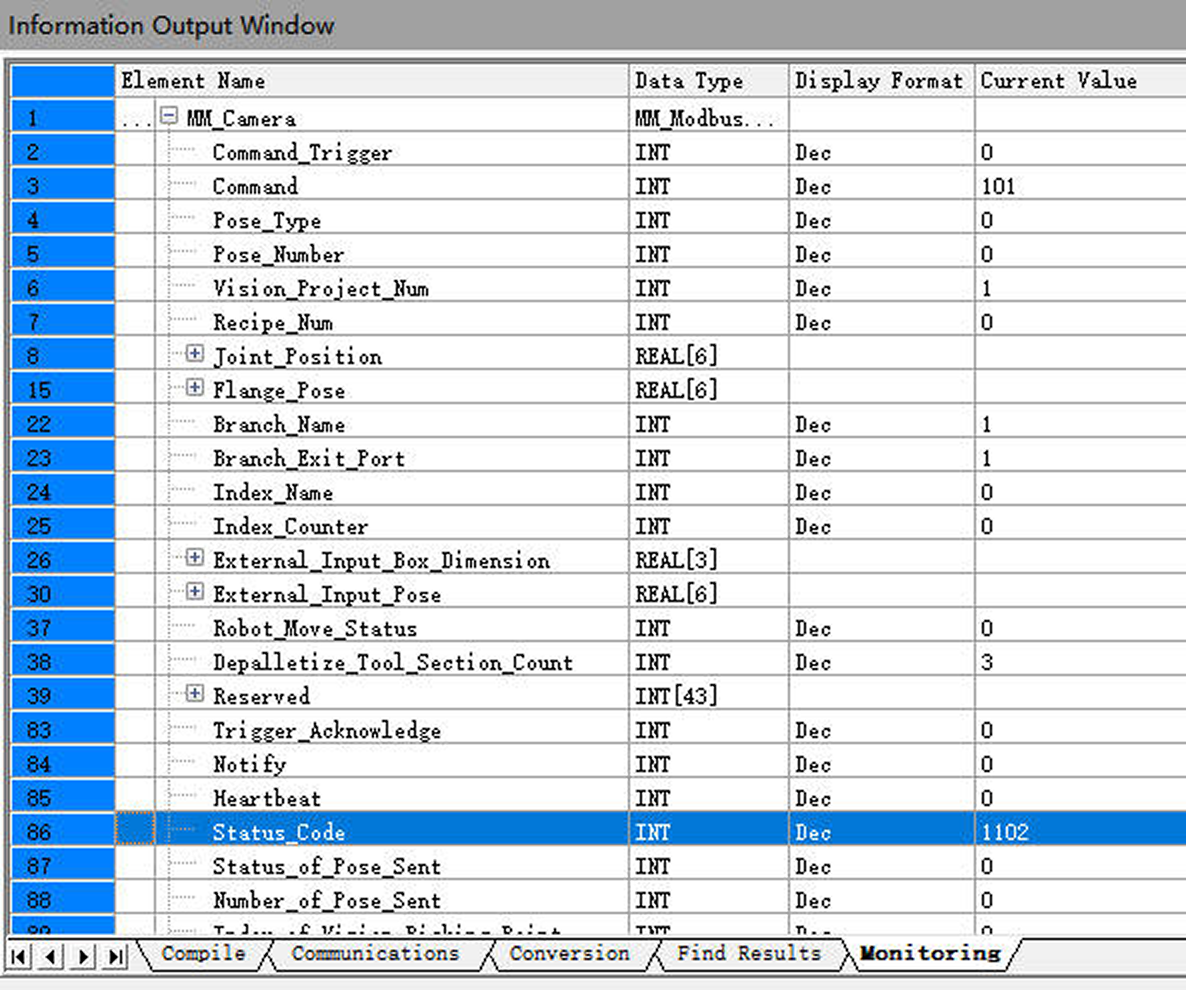
Obtenir le résultat de vision depuis Mech-Vision
-
Dans la boîte de dialogue Write Element Value, effectuez les opérations suivantes:
-
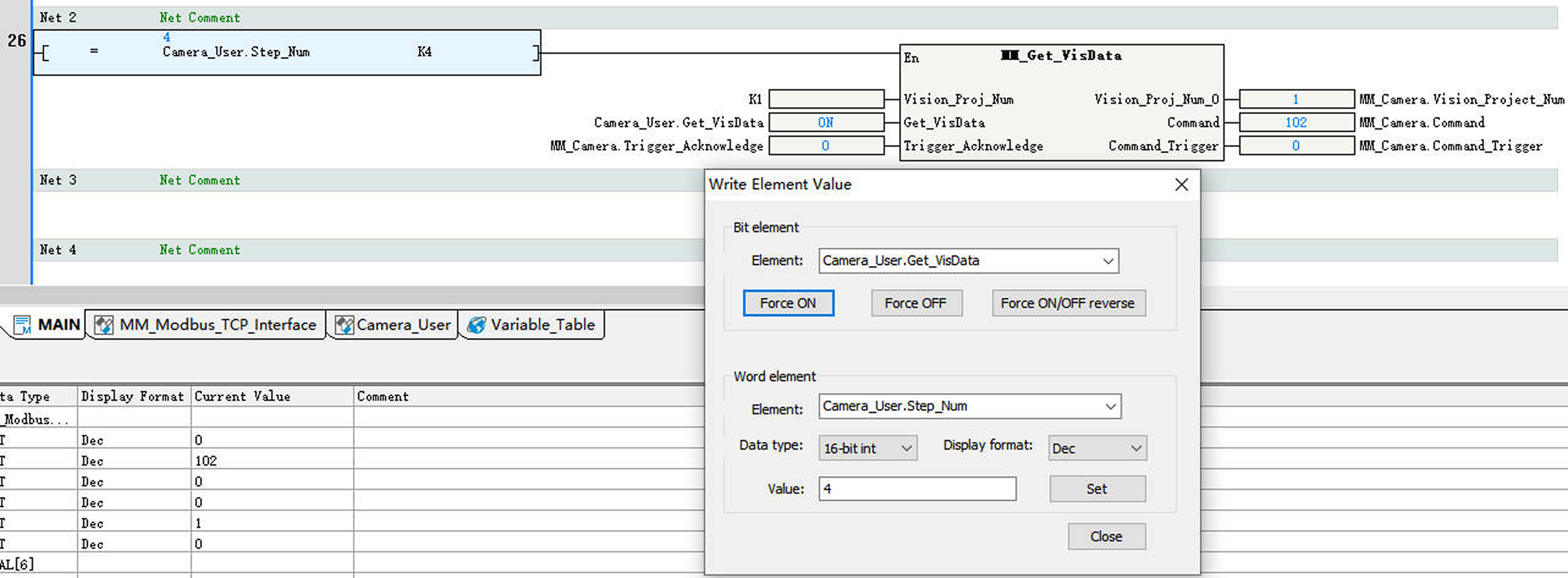
Sous Word Element, sélectionnez Camera_User.Step_Num pour Element, définissez Value sur 4, puis cliquez sur Définir pour activer la fonction MM_Get_VisData.
-
Sous Bit Element, sélectionnez Camera_User.Get_VisData pour Element, cliquez sur Forcer ON pour obtenir le résultat de vision. Cliquez ensuite sur Forcer OFF pour réinitialiser CameraUser.Get_VisData.
-
-
Dans Information Output Window, cliquez sur l’onglet Monitoring. Si la valeur de Status_Code est 1100, cela indique que le résultat de vision a été obtenu avec succès. Vérifiez les valeurs de Target_Pose. Ces valeurs indiquent les données de pose des points de vision.
Si 10XX s’affiche pour Status_Code, reportez-vous à Codes d’état et dépannage pour le dépannage. 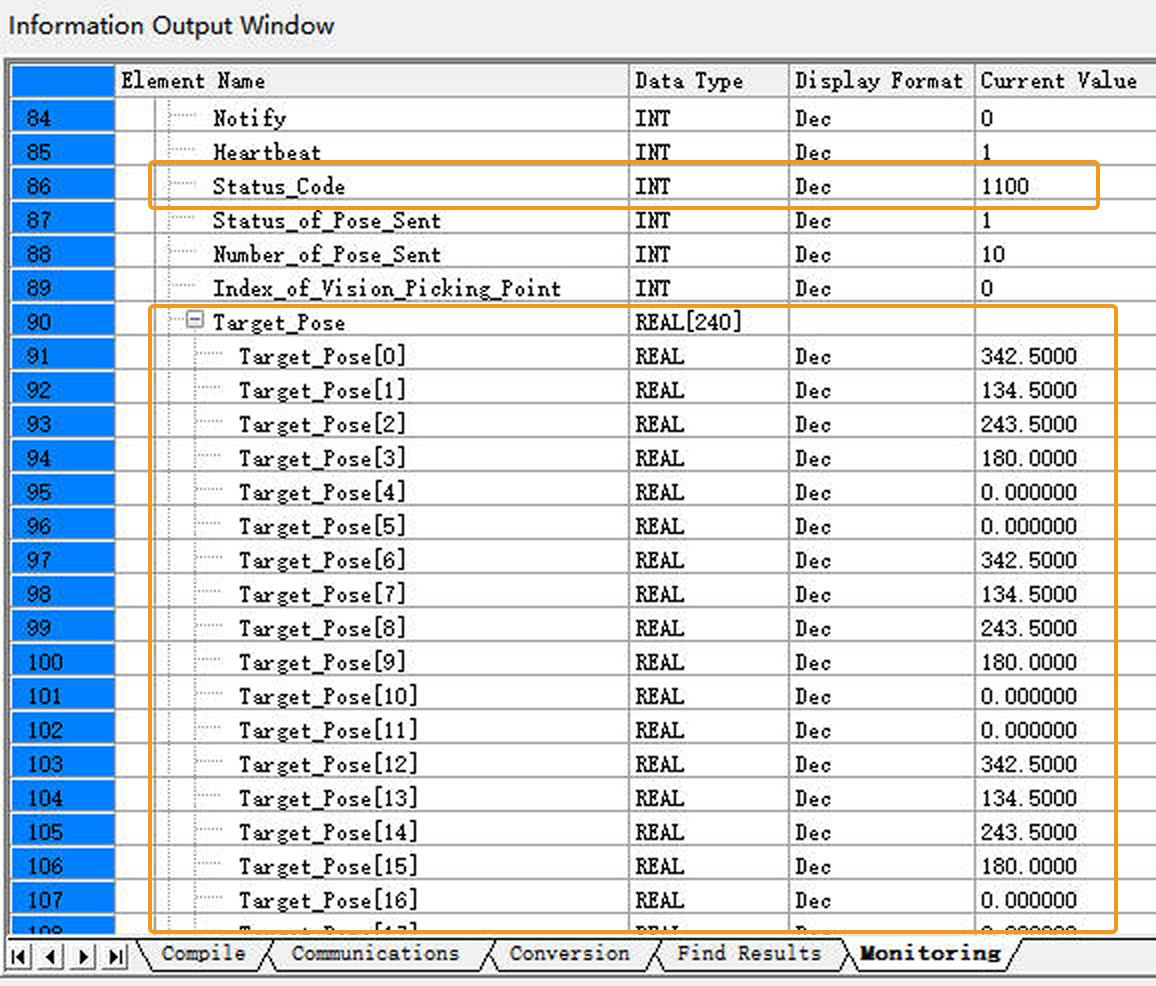
Obtenir la trajectoire planifiée depuis Mech-Viz
Paramétrage
-
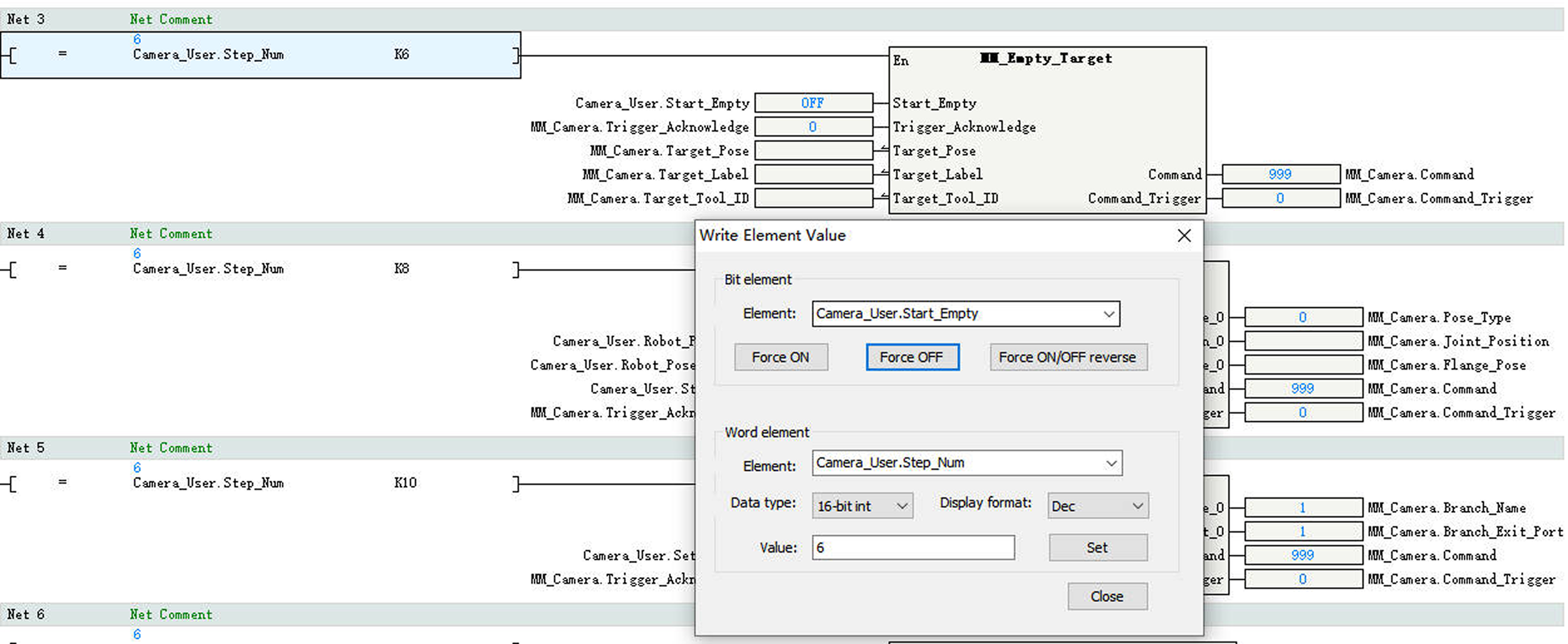
Dans le panneau Project Manager, double-cliquez sur MAIN. Dans Net 3, saisissez la commande de comparaison LD= Camera_User.Step_Num K6. Appliquez ensuite la commande MM_Empty_Target.

-
Ajoutez les variables correspondantes aux ports d’entrée et de sortie de MM_Empty_Target comme indiqué dans la figure ci-dessous.

-
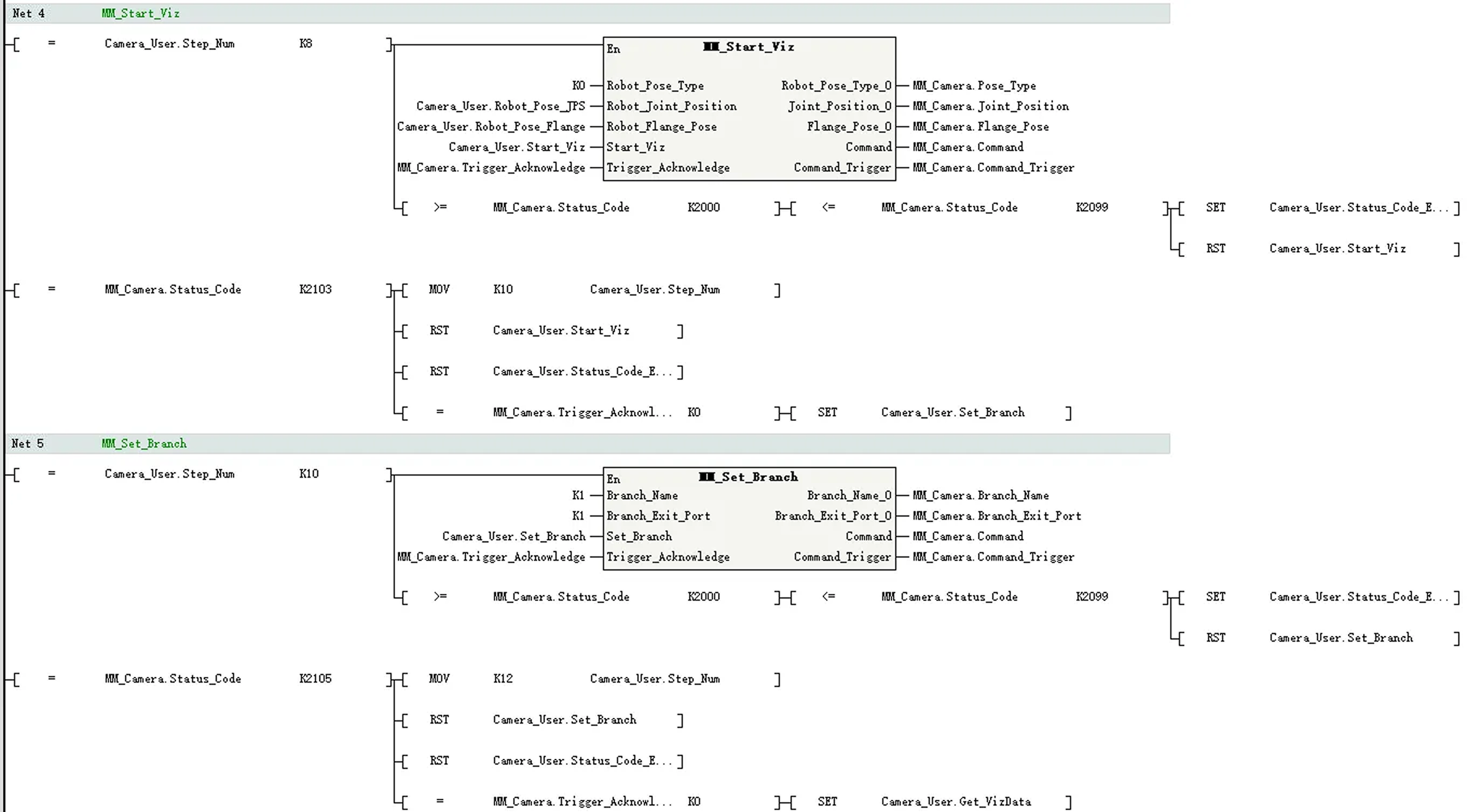
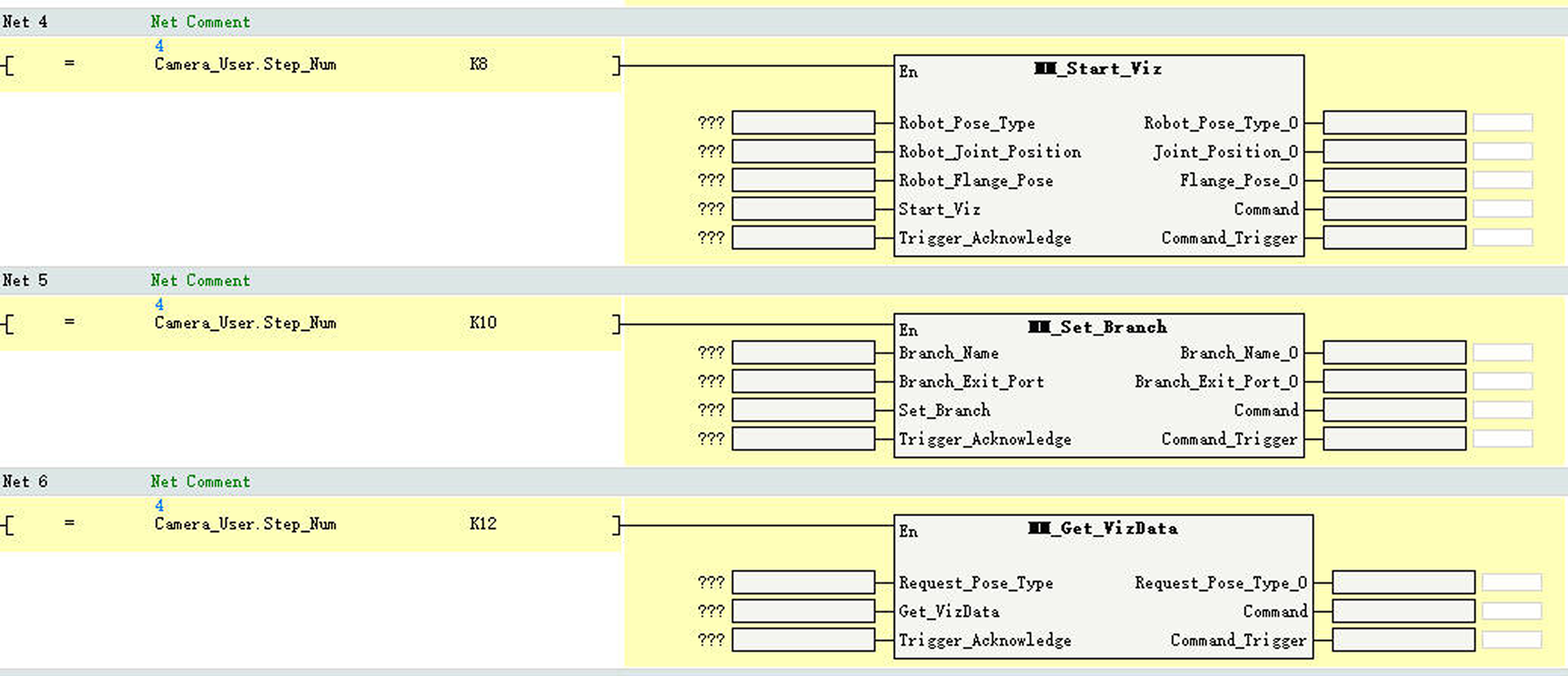
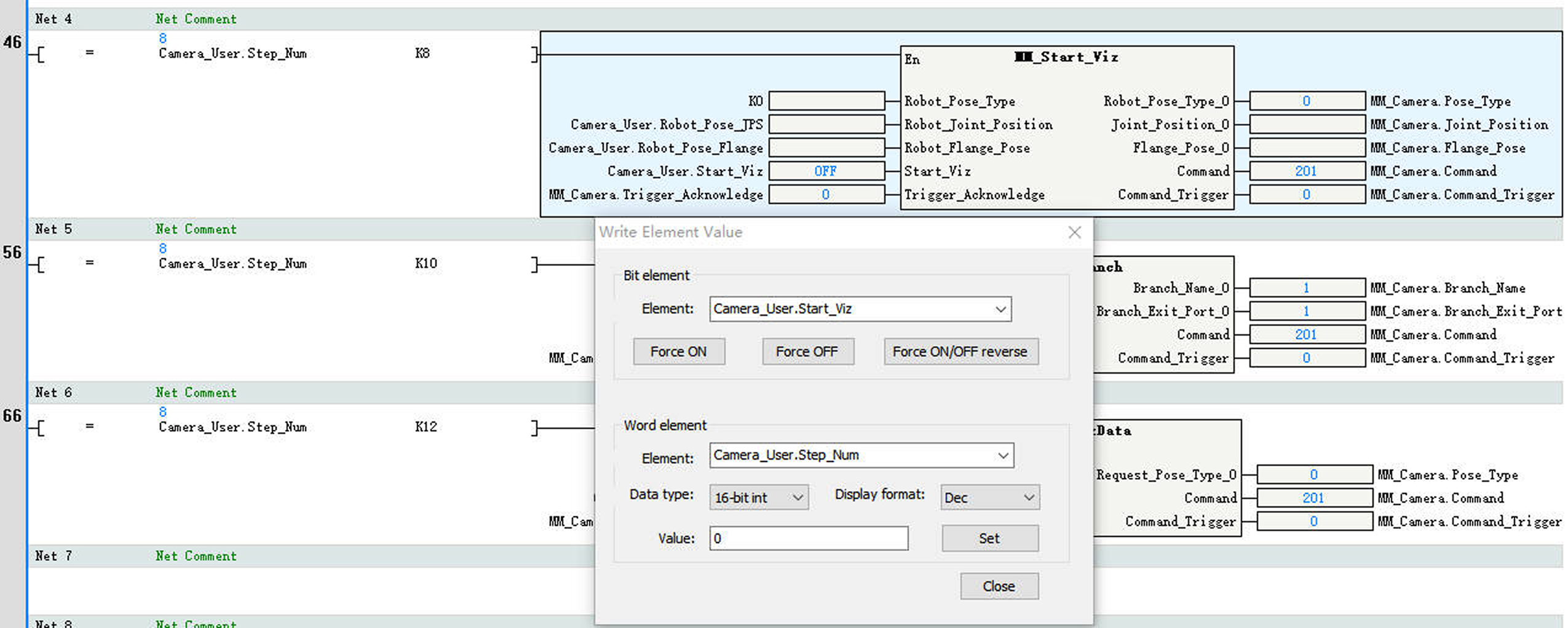
Dans Net 4, saisissez la commande de comparaison LD= Camera_User.Step_Num K8. Appliquez ensuite la commande MM_Start_Viz.
-
Dans Net 5, saisissez la commande de comparaison LD= Camera_User.Step_Num K10. Appliquez ensuite la commande MM_Set_Branch.
-
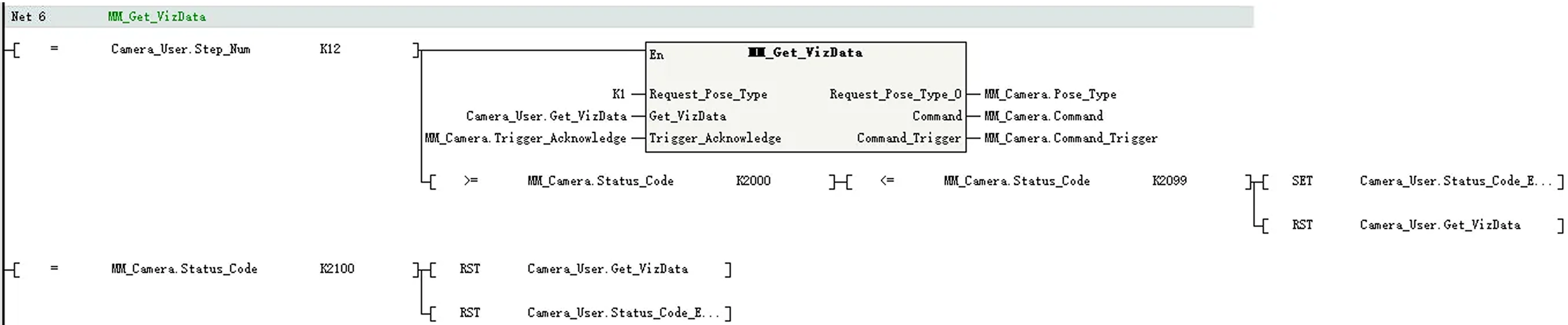
Dans Net 6, saisissez la commande de comparaison LD= Camera_User.Step_Num K12. Appliquez ensuite la commande MM_Get_VizData.
-
Configurez les ports d’entrée et de sortie de MM_Start_Viz comme indiqué dans la figure ci-dessous.
-
Définissez la valeur de Robot_Pose_Type sur 0. La pose de prise de vue n’a alors pas besoin d’être envoyée au projet Mech-Viz. Par exemple, la pose de prise de vue n’a pas besoin d’être envoyée lorsque la caméra est montée en mode œil-vers-main.
-
Ajoutez les variables correspondantes aux ports restants comme indiqué dans la figure ci-dessous.

-
-
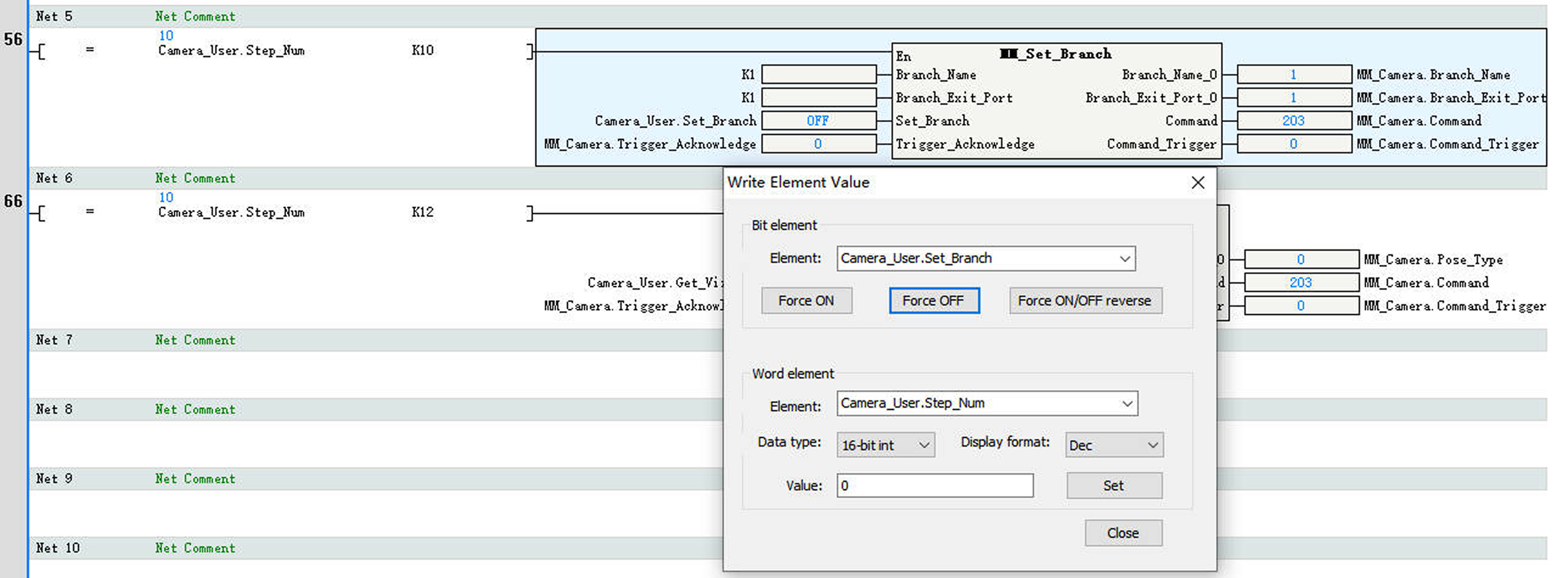
Configurez les ports d’entrée et de sortie de MM_Set_Branch comme indiqué dans la figure ci-dessous.
-
Définissez les valeurs de Branch_Name et Branch_Exit_Port toutes deux sur 1 pour indiquer que le projet emprunte le port n° 1 de l’étape Branch by Msg n° 1 du projet Mech-Viz.
-
Ajoutez les variables correspondantes aux ports restants comme indiqué dans la figure ci-dessous.

-
-
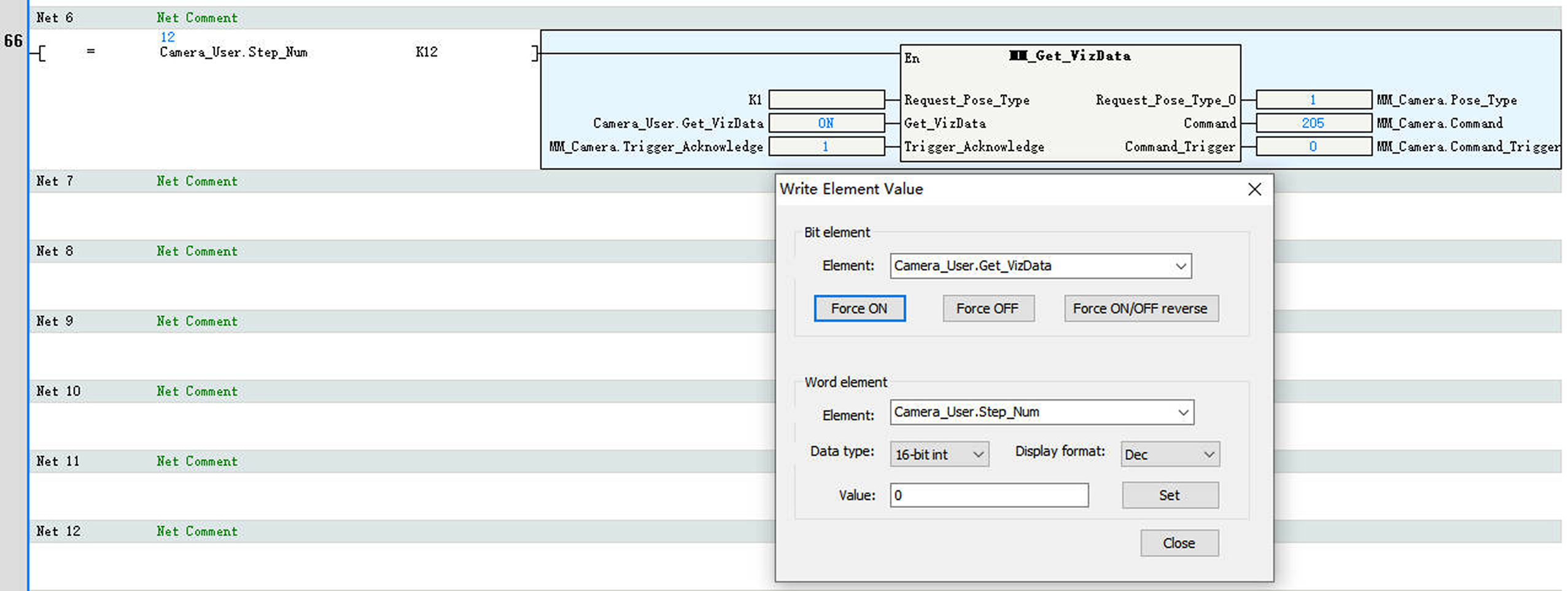
Configurez les ports d’entrée et de sortie de MM_Get_VizData comme indiqué dans la figure ci-dessous.
-
Définissez la valeur de Request_Pose_Type sur 1 pour indiquer que les points de passage planifiés par Mech-Viz seront renvoyés en positions articulaires.
-
Ajoutez les variables correspondantes aux ports restants comme indiqué dans la figure ci-dessous.

-
-
Dans la barre d’outils, cliquez sur l’icône Download.
-
Dans Information Output Window, cliquez sur l’onglet Communications. Si le téléchargement réussit, un message Download successful s’affiche ici.
Exécuter le projet Mech-Viz
-
Dans la barre d’outils du logiciel AutoShop, cliquez sur l’icône Write.
-
Dans la boîte de dialogue Write Element Value, effectuez les opérations suivantes:
-
Sous Word Element, sélectionnez Camera_User.Step_Num pour Element, définissez Value sur 6, puis cliquez sur Définir pour activer la fonction MM_Empty_Target.
-
Sous Bit Element, sélectionnez Camera_User.Start_Empty pour Element, cliquez sur Forcer ON pour effacer le résultat de vision obtenu. Cliquez ensuite sur Forcer OFF pour réinitialiser CameraUser.Start_Empty.
-
-
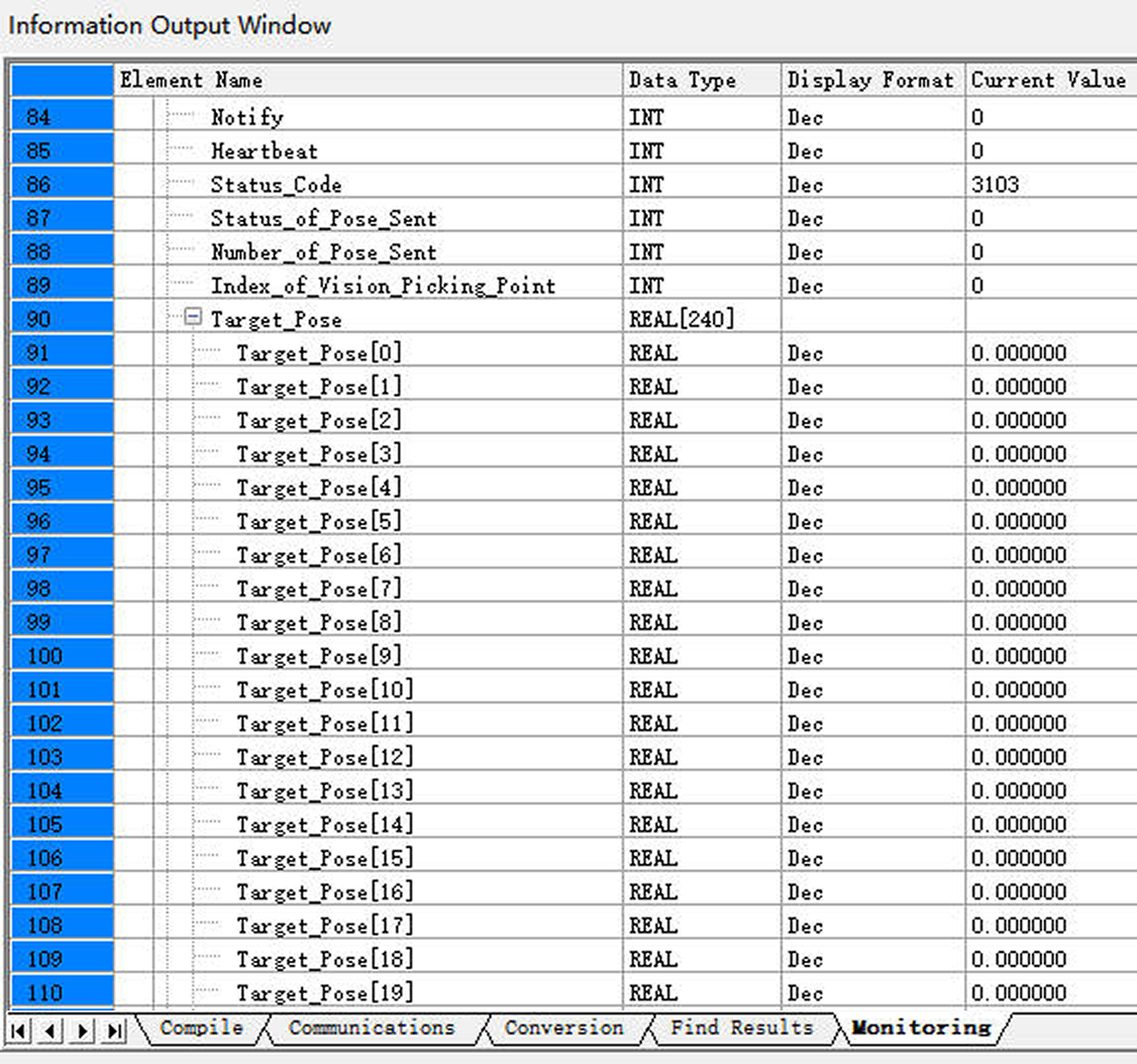
Dans Information Output Window, cliquez sur l’onglet Monitoring. Si la valeur de Status_Code est 3103, cela indique que les valeurs des variables Camera_User.Target_Pose, Camera_User.Target_Label et Camera_User.Target_Tool_ID ont été effacées avec succès.
-
Dans la boîte de dialogue Write Element Value, effectuez les opérations suivantes:
-
Sous Word Element, sélectionnez Camera_User.Step_Num pour Element, définissez Value sur 8, puis cliquez sur Définir pour activer la fonction MM_Start_Viz.
-
Sous Bit Element, sélectionnez Camera_User.Start_Viz pour Element, cliquez sur Forcer ON pour déclencher le projet Mech-Viz. Cliquez ensuite sur Forcer OFF pour réinitialiser Camera_User.Start_Viz.
-
-
Dans Information Output Window, cliquez sur l’onglet Monitoring. Si la valeur de Status_Code est 2103, cela indique que le projet Mech-Viz a été déclenché avec succès.
Si 20XX s’affiche pour Status_Code et que vous souhaitez résoudre le problème, consultez Codes d’état et dépannage. 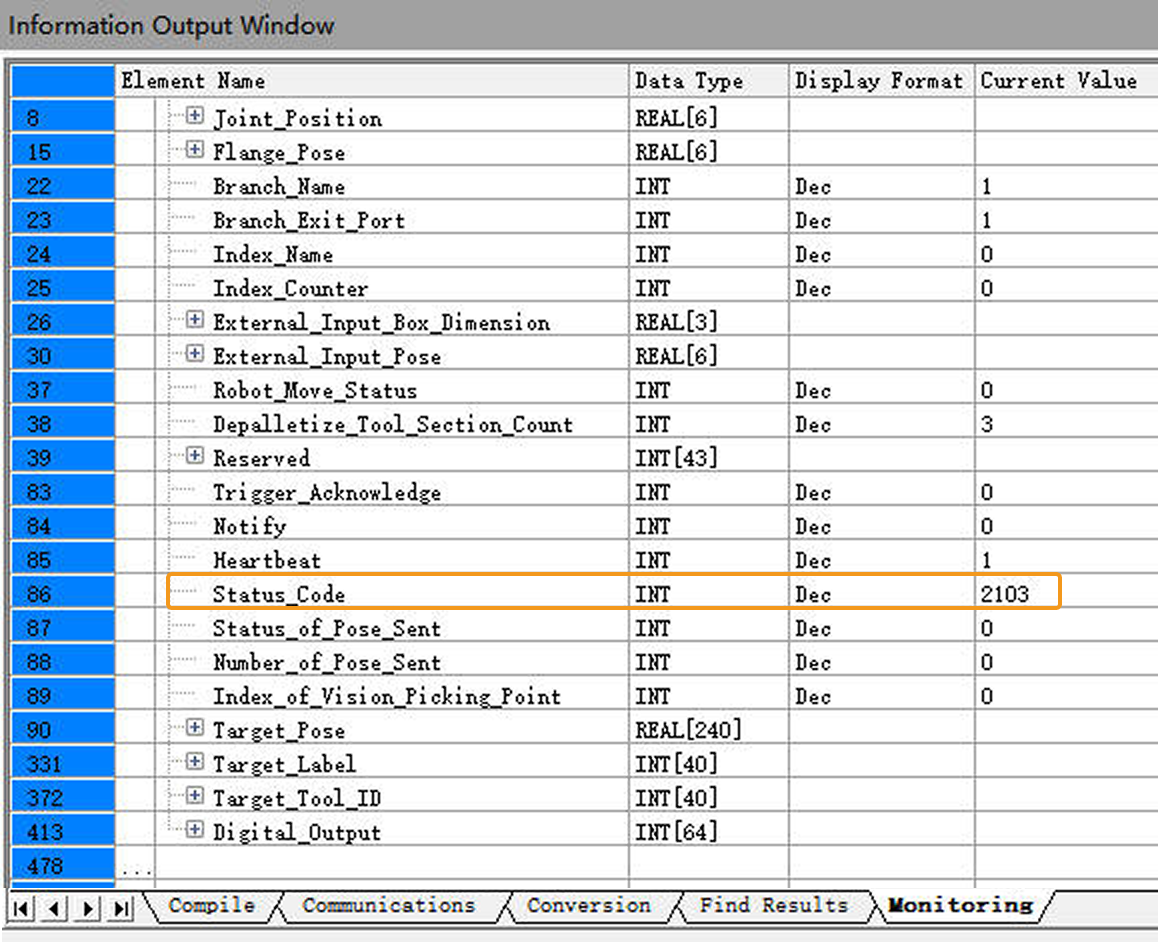
Définir le port de sortie pour l’étape Branch by Msg dans Mech-Viz
-
Dans la boîte de dialogue Write Element Value, effectuez les opérations suivantes:
-
Sous Word Element, sélectionnez Camera_User.Step_Num pour Element, définissez Value sur 10, puis cliquez sur Définir pour activer la fonction MM_Set_Branch.
-
Sous Bit Element, sélectionnez Camera_User.Set_Branch pour Element, cliquez sur Forcer ON pour définir le port de sortie de l’étape Branch by Msg dans Mech-Viz. Cliquez ensuite sur Forcer OFF pour réinitialiser CameraUser.Set_Branch.
-
-
Dans Information Output Window, cliquez sur l’onglet Monitoring. Si la valeur de Status_Code est 2105, cela indique que le port de sortie a été défini avec succès pour l’étape Branch by Msg dans Mech-Viz.
Si 20XX s’affiche pour Status_Code et que vous souhaitez résoudre le problème, consultez Codes d’état et dépannage. 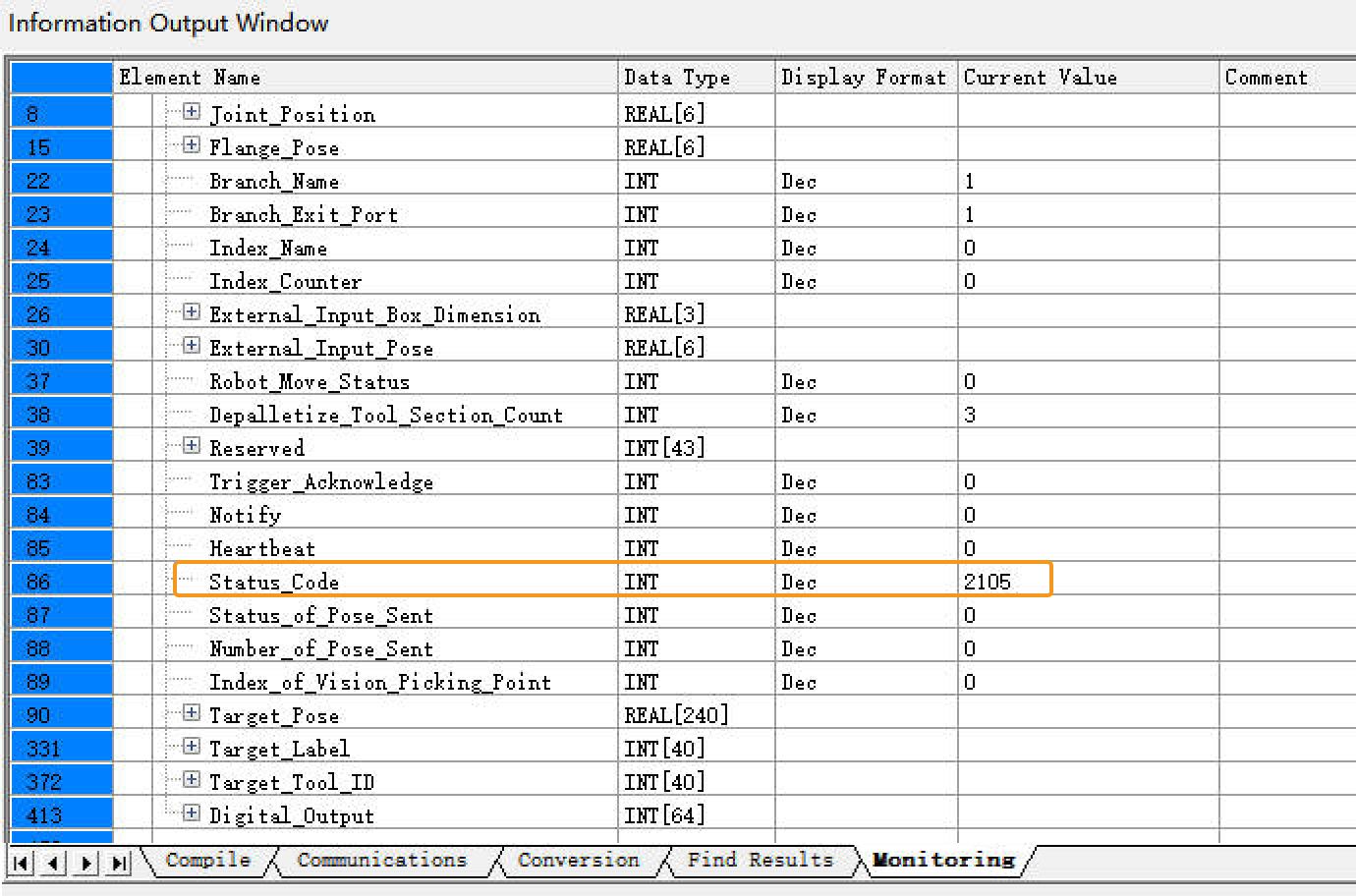
Obtenir la trajectoire planifiée dans Mech-Viz
-
Dans la boîte de dialogue Write Element Value, effectuez les opérations suivantes:
-
Sous Word Element, sélectionnez Camera_User.Step_Num pour Element, définissez Value sur 12, puis cliquez sur Définir pour activer la fonction MM_Get_VizData.
-
Sous Bit Element, sélectionnez Camera_User.Get_VizData pour Element, cliquez sur Forcer ON pour obtenir la trajectoire planifiée depuis Mech-Viz. Cliquez ensuite sur Forcer OFF pour réinitialiser CameraUser.Get_VizData.
-
-
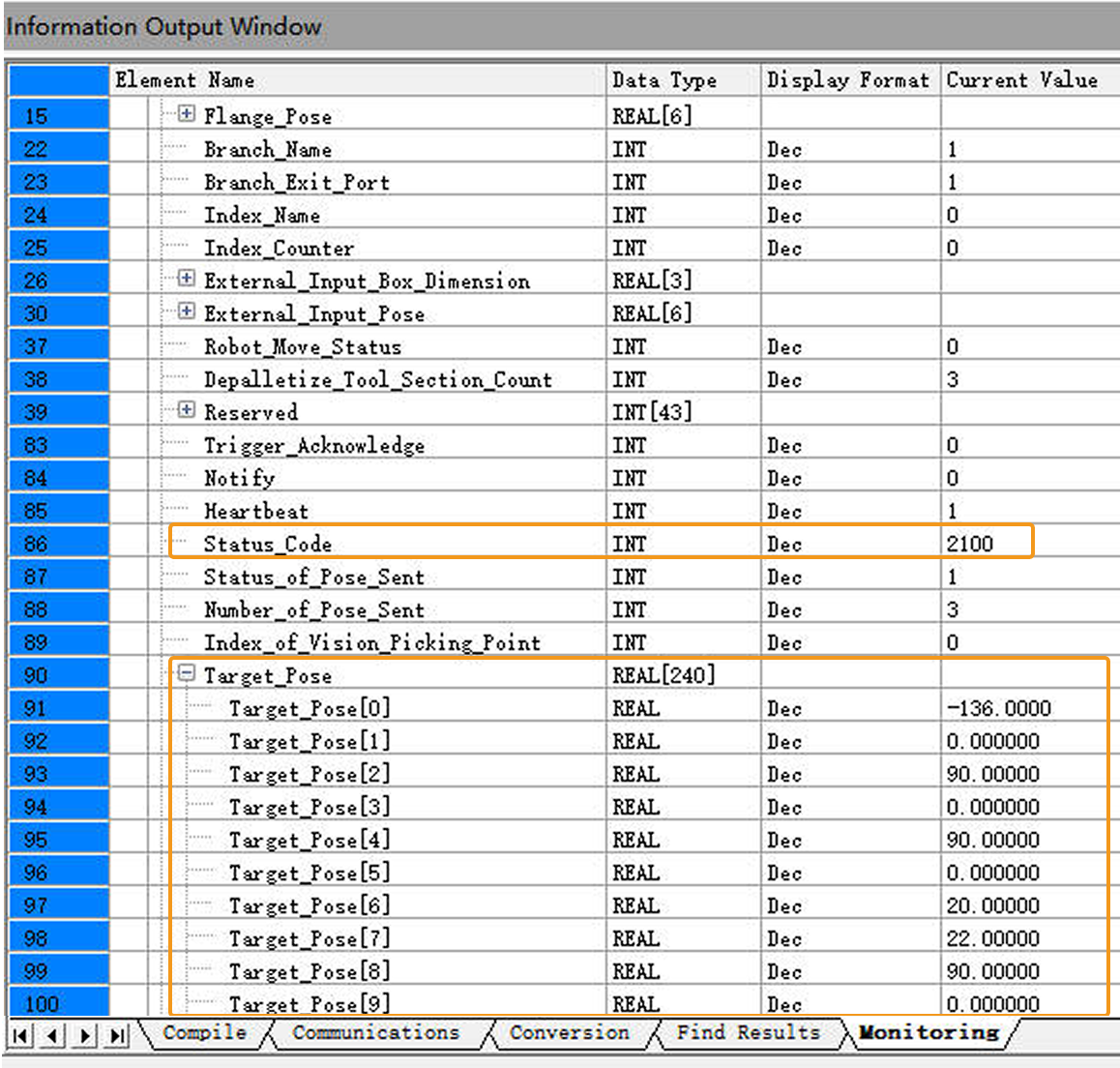
Dans Information Output Window, cliquez sur l’onglet Monitoring. Si la valeur de Status_Code est 2100, cela indique que la trajectoire planifiée a été obtenue avec succès. Vérifiez les valeurs de Target_Pose. Ces valeurs indiquent les données de pose des points de passage.
Si 20XX s’affiche pour Status_Code et que vous souhaitez résoudre le problème, consultez Codes d’état et dépannage.