Guide du Générateur d’adaptateur
Ce guide présente le Générateur d’adaptateur et montre comment générer rapidement un programme d’adaptateur à l’aide du Générateur d’adaptateur. Dans le texte ci-dessous, « Adaptateur » est utilisé comme forme abrégée de « programme d’adaptateur ».
Introduction
Le Générateur d’adaptateur est un outil permettant de générer aisément un programme d’adaptateur. Les utilisateurs peuvent générer un programme d’adaptateur simplement en configurant des paramètres via une interface graphique. Les utilisateurs peuvent également personnaliser les fichiers du programme pour implémenter des fonctionnalités avancées allant au-delà des capacités de la communication Standard Interface.
Le programme d’adaptateur est un programme Python qui facilite la communication entre un dispositif externe (tel qu’un robot industriel, un ordinateur hôte ou un API/PLC) et Mech-Vision / Mech-Viz. Il utilise les protocoles de communication pris en charge par Python pour établir la connexion.
La relation entre le Générateur d’adaptateur et le programme d’adaptateur est illustrée dans l’image ci-dessous.
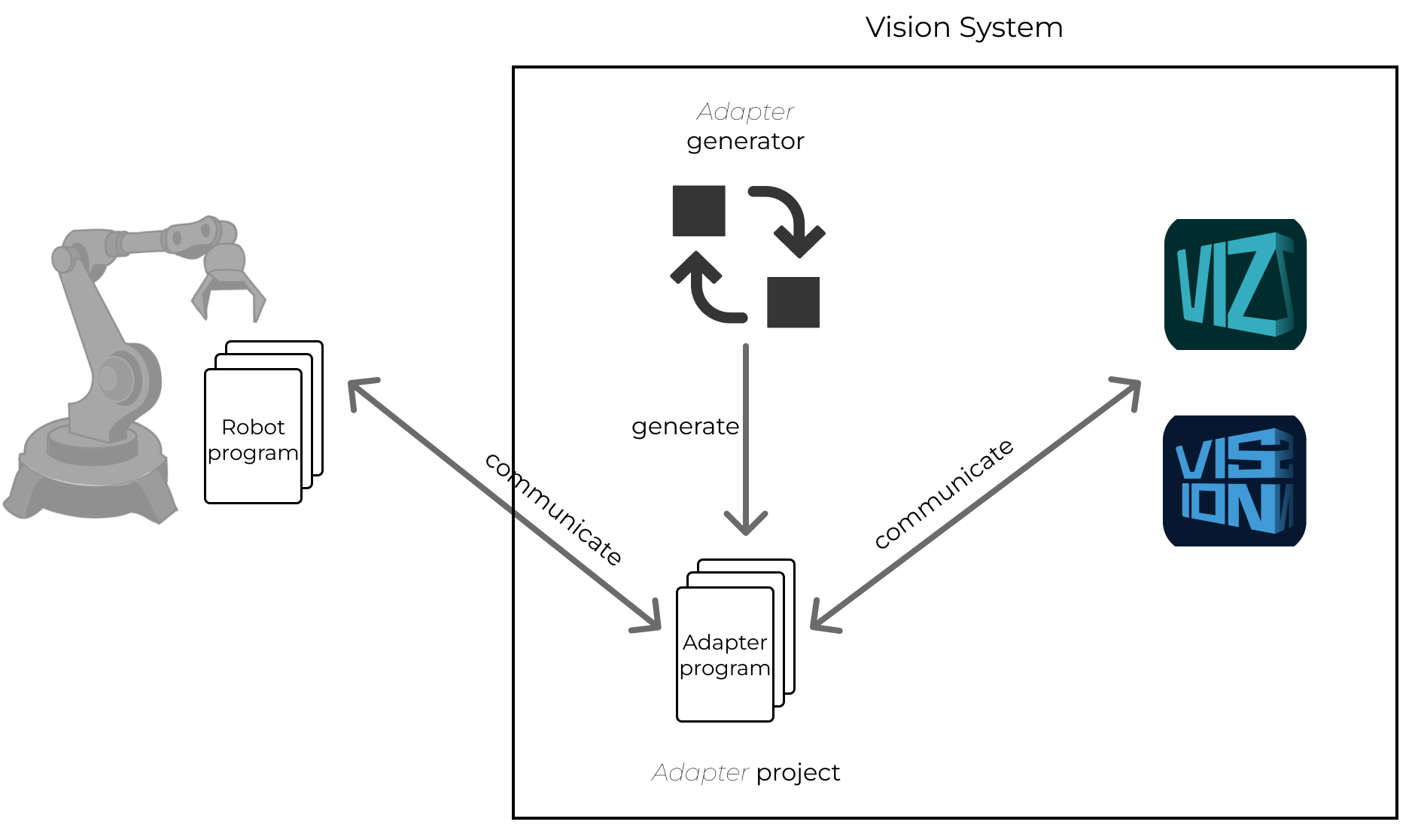
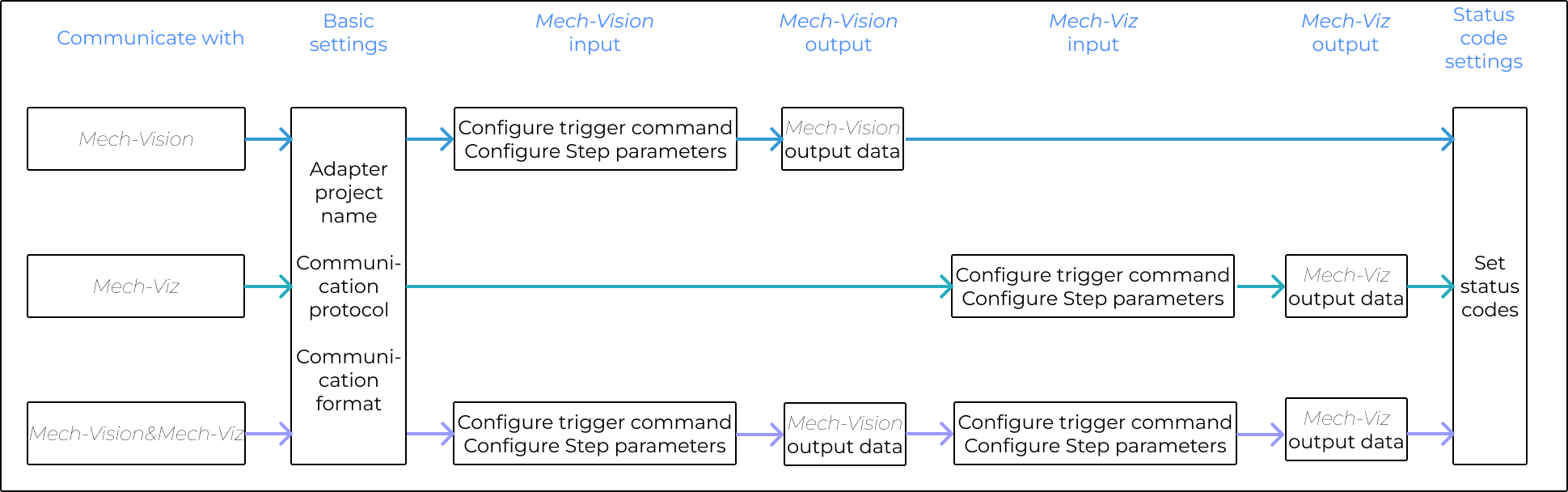
La fonction principale du Générateur d’adaptateur est de configurer les commandes utilisées pour la communication entre le programme du robot et le programme d’adaptateur. Les commandes qui déclenchent Mech-Vision / Mech-Viz pour capturer des images et définir les paramètres d’étape de Mech-Vision / Mech-Viz sont répertoriées dans le flux de configuration du Générateur d’adaptateur. Les utilisateurs peuvent configurer une ou plusieurs de ces commandes en fonction de l’objet de communication et de leurs exigences pratiques. Le flux de configuration du Générateur d’adaptateur est illustré dans l’image ci-dessous.
Le tableau ci-dessous explique comment sélectionner l’objet de communication pour le programme d’adaptateur.
Communiquer avec |
Description |
Scénarios applicables |
Mech-Vision |
Obtenir des résultats de vision ou des trajectoires planifiées depuis Mech-Vision. |
Projets de planification de trajectoire simples ou projets impliquant uniquement l’envoi de résultats de vision. |
Mech-Viz |
Mech-Viz planifie la trajectoire en appelant le service de vision correspondant à un projet Mech-Vision. Par ailleurs, avant que le projet Mech-Viz n’appelle le service de vision, les paramètres d’étape de Mech-Vision n’ont pas besoin d’être définis ou peuvent être définis dans la recette de paramètres. |
Projets de planification de trajectoire plus complexes. |
Mech-Vision & Mech-Viz |
Mech-Viz planifie la trajectoire et l’une des situations suivantes existe :
|
Les utilisateurs peuvent envisager de sélectionner cet objet de communication lorsque les deux options ci-dessus ne peuvent pas répondre aux exigences du projet. |
Générer un programme d’adaptateur à l’aide du Générateur d’adaptateur
Cette section présente comment générer rapidement un programme d’adaptateur à l’aide du Générateur d’adaptateur.
| Avant de commencer, assurez-vous d’avoir configuré et ouvert une solution Mech-Vision et un projet Mech-Viz (le cas échéant). |
Ouvrir le Générateur d’adaptateur
Dans la barre de menus de Mech-Vision, cliquez sur , et la fenêtre Générateur d’adaptateur s’affichera.
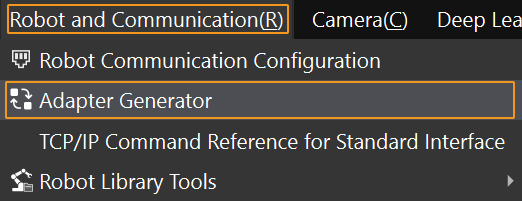
|
Configurer « Paramètres de base »
-
Sur l’onglet Paramètres de base, configurez Nom du projet d’adaptateur, Communiquer avec, Protocole de communication et Format de communication.
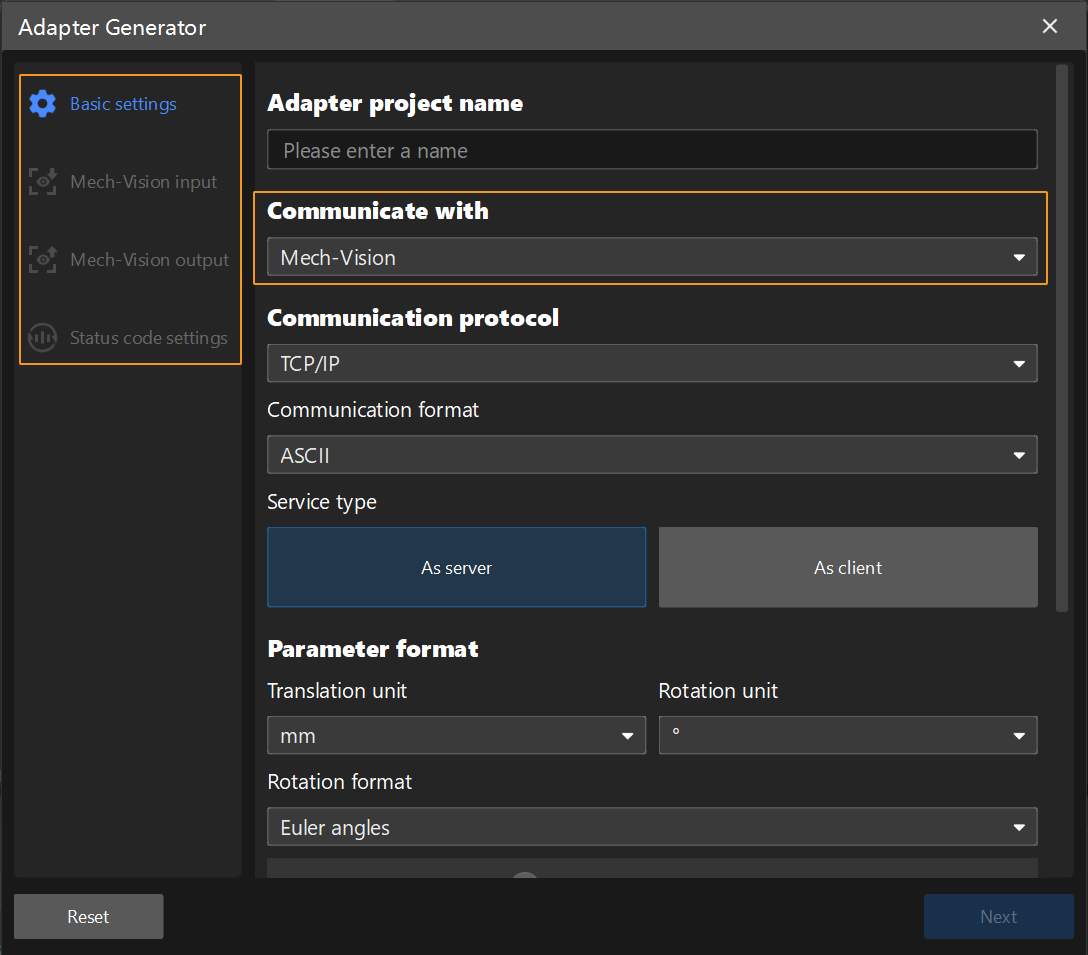
Le flux de configuration varie en fonction de la valeur de Communiquer avec. En d’autres termes, le panneau de gauche affiche des options de configuration différentes selon la valeur de Communiquer avec. Par exemple, lorsque la valeur Mech-Vision est sélectionnée pour « Communiquer avec », vous n’aurez besoin de configurer que Paramètres de base, Entrée Mech-Vision, Sortie Mech-Vision et Paramètres du code d’état. Configurez Paramètres de base conformément aux instructions du tableau ci-dessous.
Entrée de configuration Description Nom du projet d’adaptateur
Ce paramètre spécifie le nom du projet d’adaptateur. Le nom du projet est une chaîne de lettres, de chiffres ou de caractères de soulignement et ne peut pas commencer par un chiffre.
Communiquer avec
Mech-Vision
Les entrées et sorties de Mech-Vision doivent être configurées.
Mech-Viz
Les entrées et sorties de Mech-Viz doivent être configurées.
Mech-Vision & Mech-Viz
Les entrées et sorties de Mech-Vision et de Mech-Viz doivent être configurées.
Protocole de communication
TCP/IP
Format de communication
Ce paramètre spécifie le format de chaîne pour la transmission des données. Actuellement, seul le format ASCII est pris en charge.
Type de service
Ce paramètre spécifie si le projet d’adaptateur est utilisé comme serveur ou client dans la communication TCP/IP. Par défaut, le projet est utilisé comme serveur.
Format des paramètres
Unité de translation
mm (millimètre, par défaut) ou m (mètre)
Unité de rotation
° (degré, par défaut) ou rad (radian)
Format de rotation
Angles d’Euler
Le format des angles d’Euler est fréquemment utilisé. Sélectionnez la valeur de Convention des angles d’Euler en fonction du modèle de robot.
-
ABB/EPSON/ESTUN/KUKA/NACHI : Z-Y'-X''(ZYX_ROTATED)
-
AUBO/DENSO/DOBOT/DELTA/EFORT/ELITE/FANUC/FLEXIV/FR/HANS/HYUNDAI/JAKA/MELFA/ROKAE/SIASUN/STEP/TM/YASKAWA : X-Y-Z(XYZ_STATIC)
-
COMAU/DOOSAN/KAWASAKI/QJAR : Z-Y'-Z''(ZYZ_ROTATED)
-
STAUBLI/TURIN : X-Y'-Z''(XYZ_ROTATED)
-
UR : ur_rot
Quaternion
Lorsque cette valeur de paramètre est sélectionnée, toutes les poses dans les données d’entrée et de sortie seront transmises au format quaternion.
Autre format de données
Nombre de décimales du nombre à virgule flottante
Ce paramètre spécifie le nombre de décimales du nombre à virgule flottante. La valeur varie de 1 à 20. La valeur par défaut est 4.
Délimiteur de chaîne
Ce paramètre spécifie le délimiteur de chaîne. Les délimiteurs de chaîne courants comprennent la virgule, le point-virgule et l’espace. Par défaut, le délimiteur de chaîne est la virgule.
Ces trois entrées de configuration n’apparaissent que lorsque le protocole de communication est TCP/IP et que le format de communication est ASCII.
Terminator de chaîne
Ce paramètre spécifie le terminateur de chaîne des commandes. Les terminateurs de chaîne courants sont \n, \r et \r\n. Par défaut, le terminateur est \r.
Ajouter un caractère de début et de fin
Cette option spécifie le caractère de début et de fin d’une commande. Après avoir sélectionné cette option, les utilisateurs doivent saisir un caractère de début et un caractère de fin. Par défaut, les deux sont des espaces. Par exemple, lorsque les caractères de début et de fin de la commande « p,1\r » sont respectivement < et >, la forme complète de la commande est « <p,1>\r ».
-
-
Après avoir terminé la configuration ci-dessus, cliquez sur Suivant. Vous serez dirigé vers l’interface de configuration des commandes en fonction du paramètre « Communiquer avec ».
Configurer « Entrée Mech-Vision »
Définissez les formats de commandes envoyées par le robot ou l’ordinateur hôte à Mech-Vision sur l’onglet Entrée Mech-Vision. Les entrées de configuration incluent Commande de déclenchement, Définir les paramètres d’étape de Mech-Vision et Obtenir le nom du robot auprès de Mech-Vision.
Configurer la commande de déclenchement
-
Configurez la commande qui déclenche Mech-Vision pour capturer des images.
Cette commande est principalement utilisée pour déclencher l’exécution du projet Mech-Vision. Cette commande peut également remplir les fonctions suivantes lorsque les paramètres correspondants sont configurés.
-
Si le projet Mech-Vision dispose de recettes de paramètres, cette commande peut être utilisée pour changer la recette de paramètres.
-
Si la caméra est montée en mode eye in hand, ou si le projet Mech-Vision comporte une étape « Path Planning », cette commande peut être utilisée pour fournir la pose de capture du robot au projet Mech-Vision.
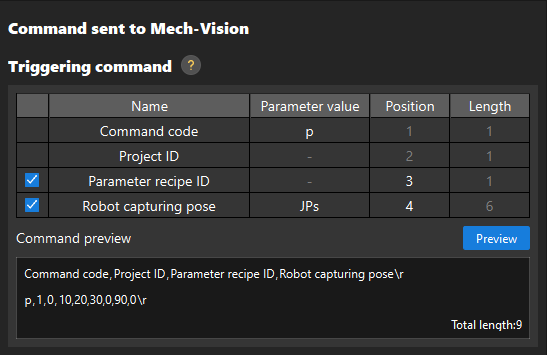
Configurez Commande de déclenchement conformément aux explications du tableau ci-dessous.
Nom : Les noms des paramètres dans la commande.
Valeur du paramètre : La valeur d’un paramètre.
Position : La position d’un paramètre dans la commande. L’ordre des positions commence à 1. Deux positions sont séparées par une virgule.
Longueur : Le nombre de champs au sein d’une valeur de paramètre. (Un champ est la donnée entre deux délimiteurs de chaîne adjacents.
Relation entre Position et Longueur : La position d’un paramètre est égale à la position du paramètre précédent plus la longueur du paramètre précédent.
Nom Valeur du paramètre Position Longueur Code de commande
Le code pour déclencher l’exécution du projet Mech-Vision. La valeur par défaut est p. La valeur peut être modifiée.
1 (valeur fixe)
1 (valeur fixe)
ID du projet
L’ID du projet Mech-Vision, un entier positif.
2 (valeur fixe)
1 (valeur fixe)
ID de la recette de paramètres (facultatif)
L’ID de la recette de paramètres dans le projet Mech-Vision, un entier positif.
Valeur définie par l’utilisateur
1 (valeur fixe)
Pose de capture du robot (facultatif)
Si le mode de montage de la caméra est eye in hand, cette commande transmet au projet Mech-Vision la pose du robot au moment de la capture d’image. La valeur du paramètre peut être définie sur « JPs » ou « JPs+Flange pose ».
Valeur définie par l’utilisateur
-
Si vous avez sélectionné « Angles d’Euler » pour le paramètre « Format de rotation » :
-
Lorsque la valeur du paramètre est « JPs », la longueur est fixée à 6.
-
Lorsque la valeur du paramètre est « JPs+Flange pose », la longueur est fixée à 12.
-
-
Si vous avez sélectionné « Quaternion » pour le paramètre « Format de rotation » :
-
Lorsque la valeur du paramètre est « JPs », la longueur est fixée à 6.
-
Lorsque la valeur du paramètre est « JPs+Flange pose », la longueur est fixée à 13.
-
-
-
Si une valeur dans les colonnes Valeur du paramètre, Position et Longueur n’est pas grisée, les utilisateurs peuvent cliquer dessus pour modifier la valeur si nécessaire.
-
Le code de commande doit être unique entre différentes commandes.
-
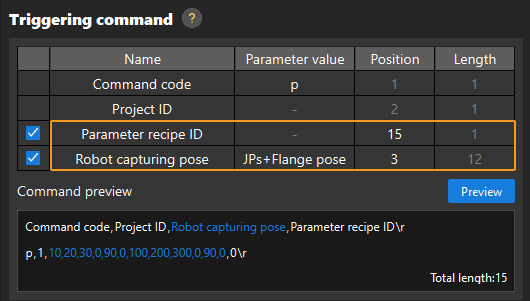
Assurez-vous que les champs occupés par différents paramètres ne se chevauchent pas. Par exemple, dans l’image ci-dessous, la position et la longueur de « pose de capture du robot » sont respectivement 3 et 12. Si la position et la longueur de « ID de la recette de paramètres » sont respectivement 4 et 1, alors le deuxième champ de « pose de capture du robot » se chevauchera avec la position de « ID de la recette de paramètres ». Si la position de « ID de la recette de paramètres » est égale ou supérieure à 15, « ID de la recette de paramètres » et « pose de capture du robot » ne se chevaucheront pas.
-
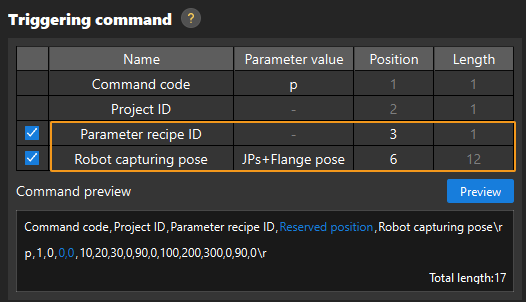
Il peut y avoir des champs vides entre les valeurs des paramètres. En prévisualisation, le champ vide est décrit comme la position réservée et rempli de 0. Par exemple, si la position et la longueur de « ID de la recette de paramètres » sont respectivement 3 et 1 ; et que la position et la longueur de « pose de capture du robot » sont respectivement 6 et 12, les positions 4 et 5 sont des champs vides et seront remplies de 0. Si la position de « pose de capture du robot » est changée à 4, il n’y aura pas de champ vide entre cette valeur de paramètre et celle de « ID de la recette de paramètres ». Il est recommandé d’attribuer une valeur appropriée à « position » pour éviter les champs vides.
-
-
Après avoir terminé les configurations ci-dessus, cliquez sur Aperçu pour générer un exemple de commande.
Dans la zone de texte Aperçu de la commande, les utilisateurs peuvent survoler le nom du champ pour voir la donnée correspondante, qui sera mise en surbrillance.
Définir les paramètres d’étape de Mech-Vision (facultatif)
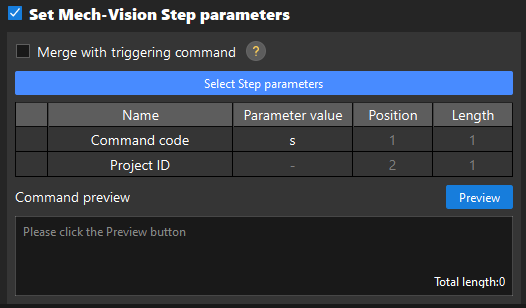
Si un paramètre d’étape ne peut pas être prédéfini dans la recette de paramètres ou doit être configuré en fonction d’informations externes, sélectionnez Définir les paramètres d’étape de Mech-Vision pour configurer la commande qui définit les valeurs des paramètres d’étape.
-
Décidez s’il faut sélectionner Fusionner avec la commande de déclenchement.
« Fusionner avec la commande de déclenchement » signifie ajouter les paramètres d’étape définis pour Mech-Vision à la commande de déclenchement. La commande Définir les paramètres d’étape de Mech-Vision peut être soit fusionnée avec la commande qui déclenche Mech-Vision pour capturer des images, soit utilisée comme une commande individuelle. Dans ce dernier cas, cette commande doit être appelée avant la commande de déclenchement.
Déterminez s’il faut sélectionner Fusionner avec la commande de déclenchement selon le tableau explicatif ci-dessous, puis effectuez les opérations correspondantes.
-
Si vous avez sélectionné Mech-Vision & Mech-Viz pour « Communiquer avec » sur la page de l’onglet Paramètres de base et que vous devez définir des paramètres d’étape pour Mech-Vision, ne sélectionnez pas Fusionner avec la commande de déclenchement. Configurez la commande qui définit les paramètres d’étape de Mech-Vision selon les informations du tableau ci-dessous, puis continuez à exécuter l’étape suivante.
Nom
Valeur du paramètre
Position
Longueur
Code de commande
Le code pour définir les paramètres d’étape de Mech-Vision. La valeur par défaut est s. La valeur peut être modifiée.
1 (valeur fixe)
1 (valeur fixe)
ID du projet
L’ID du projet Mech-Vision, un entier positif.
2 (valeur fixe)
1 (valeur fixe)
ID de la recette de paramètres (facultatif)
L’ID de la recette de paramètres dans le projet Mech-Vision, un entier positif.
Valeur définie par l’utilisateur
1 (valeur fixe)
-
Si vous avez sélectionné Mech-Vision pour « Communiquer avec » sur la page de l’onglet Paramètres de base et que vous devez définir des paramètres d’étape pour Mech-Vision, vous pouvez choisir de sélectionner ou non Fusionner avec la commande de déclenchement. Si Fusionner avec la commande de déclenchement est sélectionné, les noms et valeurs de paramètres dans le tableau ci-dessus seront fusionnés avec ceux configurés pour la commande de déclenchement.
-
-
Sélectionner des paramètres d’étape.
Cliquez sur Sélectionner des paramètres d’étape, puis sélectionnez des étapes et des paramètres dans la fenêtre contextuelle en suivant les instructions ci-dessous.
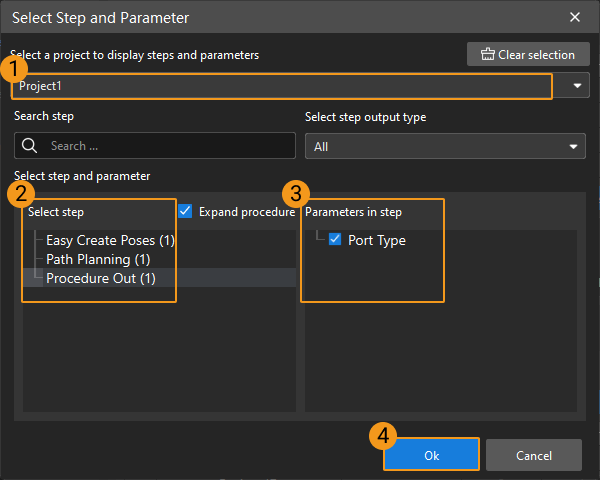
-
Sélectionnez un projet de la solution. Les étapes correspondantes et les noms de paramètres s’afficheront.
-
Cliquez sur l’étape à configurer dans la liste Sélectionner une étape.
-
Sélectionnez les noms de paramètres nécessaires dans la liste Paramètres dans l’étape.
-
Cliquez sur OK.
-
Si Définir les paramètres d’étape de Mech-Vision est sélectionné, vous devez sélectionner au moins un paramètre d’étape. Sinon, l’avertissement ci-dessous apparaîtra.
-
Les utilisateurs peuvent sélectionner plusieurs étapes et paramètres.
-
Si le type de données booléen est adopté par les valeurs de paramètres d’étape, alors 1 et 0 représentent respectivement vrai et faux.
Prenons la configuration ci-dessus comme exemple. Après avoir cliqué sur OK, la zone « Définir les paramètres d’étape de Mech-Vision » est la suivante.
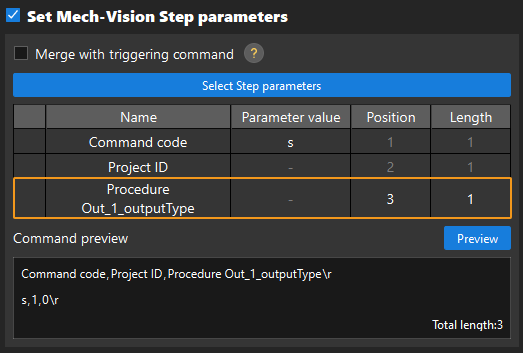
-
-
Assurez-vous que les champs occupés par différents paramètres ne se chevauchent pas.
-
Il peut y avoir des champs vides entre les valeurs des paramètres. Il est recommandé d’attribuer une valeur appropriée à « position » pour éviter les champs vides.
-
-
Après avoir terminé les configurations ci-dessus, cliquez sur Aperçu pour générer un exemple de commande.
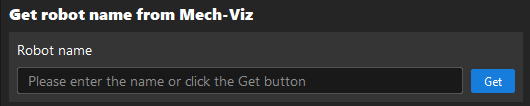
Obtenir le nom du robot auprès de Mech-Vision
-
Cliquez sur Obtenir, le modèle de robot sélectionné dans Configuration de la communication du robot s’affichera dans la zone de texte.
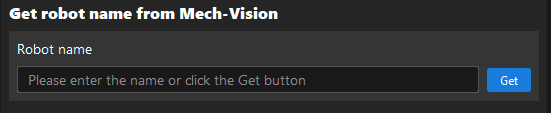
Le nom du robot obtenu est utilisé pour enregistrer un service robot. Le nom du robot affiché ici varie selon la configuration dans l’interface Configuration de la communication du robot.
Sélection du robot Nom du robot Robot répertorié
Marque et modèle du robot
Robot personnalisé
RobotType1
Ne pas utiliser de robot
no robot found
-
Après avoir terminé la configuration ci-dessus, cliquez sur Suivant pour entrer dans l’onglet de configuration Sortie Mech-Vision.
Configurer « Sortie Mech-Vision »
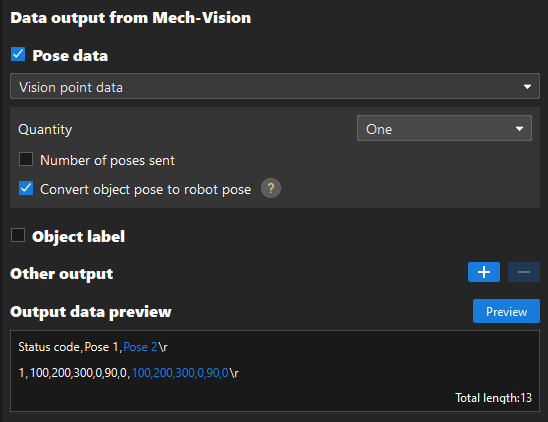
Sur l’onglet Sortie Mech-Vision, définissez les formats de commandes renvoyés par Mech-Vision au robot ou à l’ordinateur hôte. Les entrées de configuration incluent Données de pose, Étiquette d’objet et Autre sortie.
-
Déterminez quelles entrées de configuration vous devez définir en fonction des types de ports de l’étape « Output » du projet Mech-Vision.
Type de port de l’étape « Output » Nom du port Entrée de configuration Scénarios applicables Prédéfini (résultat de vision)
poses
Données de pose (données de point de vision)
Obtenir la pose de l’objet cible.
Prédéfini (résultat de vision)
poses, labels
Données de pose (données de point de vision), Étiquette d’objet
Obtenir la pose et l’étiquette de l’objet cible.
Prédéfini (trajet robot)
moves
Données de pose (trajet robot)
Planifier la trajectoire pour que le robot se déplace vers l’objet cible.
Personnalisé
Défini par l’utilisateur
Autre sortie
Obtenir des sorties de port personnalisées, par exemple, du texte OCR, des codes VIN, des mesures, etc.
-
Définissez les entrées de configuration selon la description ci-dessous.
Entrée de configuration
Description
Données de pose
Données de point de vision (Sélectionnez cette option lorsque le projet Mech-Vision n’a pas d’étape « Path Planning ».)
Quantité
Options de valeur : One, Fixed (saisie par l’utilisateur) ou All
-
One : l’adaptateur renvoie uniquement le premier point de vision parmi les N points de vision totaux renvoyés par Mech-Vision.
-
Fixed (par exemple, la valeur est M) : l’adaptateur renvoie les M premiers points de vision parmi les N points de vision totaux renvoyés par Mech-Vision.
-
All : l’adaptateur renvoie la totalité des N points de vision renvoyés par Mech-Vision.
Nombre de poses envoyées
Les données renvoyées par Mech-Vision incluent le nombre de poses envoyées cette fois. Dans les données de sortie, la position du paramètre du nombre de poses se situe avant le(s) paramètre(s) de pose.
Convertir la pose de l’objet en pose robot
Retourne automatiquement la pose dans le résultat de reconnaissance de Mech-Vision autour de l’axe X de 180° pour orienter l’axe Z vers le bas, ce qui permet au robot de se déplacer directement vers cette pose pour la préhension de l’objet.
Trajet robot (Sélectionnez cette option lorsque le projet Mech-Vision comporte une étape « Path Planning ».)
Type de pose
Valeur : JPs ou TCP
Nombre de poses envoyées
Les données renvoyées par Mech-Vision incluent le nombre de poses envoyées cette fois. Dans les données de sortie, la position du paramètre du nombre de poses se situe avant le(s) paramètre(s) de pose.
Indice du point de vision dans le trajet
La position du point de passage correspondant à l’étape « Vision Move » de l’outil Path Planning dans l’ensemble du trajet planifié.
Type de mouvement MOVEJ / MOVEL
Le type de mouvement du point de passage. 1 représente MOVEJ, et 2 représente MOVEL.
Étiquette d’objet
Sortie du port labels de l’étape « Output ».
Autre sortie (Cliquez sur l’icône « + » pour configurer des paramètres pour plusieurs ports)
Nom du port
Le nom du port personnalisé de l’étape « Output ».
Type de données
Valeur : stringlist ou numberlist
-
Assurez-vous que la longueur de la liste de données de la sortie personnalisée correspond à celle de la sortie du port labels ou poses. Sinon, une erreur peut survenir lors de la transmission des données d'Autre sortie.
-
Dans le scénario où Données de point de vision est sélectionné pour « Données de pose », si « Quaternion » est sélectionné pour « Format de rotation » sur l’onglet Paramètres de base, chaque pose dans les données de sortie occupe 7 champs.
-
Dans le scénario où Trajet robot est sélectionné pour « Données de pose » et où « Quaternion » est sélectionné pour « Format de rotation » sur l’onglet Paramètres de base, si « TCP » est sélectionné pour « Type de pose », chaque pose dans les données de sortie occupe 7 champs ; et si « JPs » est sélectionné pour « Type de pose », chaque pose dans les données de sortie occupe 6 champs.
-
Lorsque aucune des entrées de configuration n’est sélectionnée, l’utilisateur ne peut pas passer à l’onglet de configuration suivant.
-
-
Après avoir terminé les configurations ci-dessus, cliquez sur Aperçu pour générer un exemple de commande. Si l’aperçu des données correspond aux attentes, cliquez sur Suivant pour passer à l’onglet de configuration suivant.
Configurer « Entrée Mech-Viz »
Configurez les formats de commandes par le robot ou l’ordinateur hôte à Mech-Viz sur l’onglet Entrée Mech-Viz. Les entrées de configuration incluent Commande de déclenchement, Définir les paramètres d’étape de Mech-Viz et Obtenir le nom du robot auprès de Mech-Viz.
Configurer la commande de déclenchement
-
Configurez la commande qui déclenche Mech-Viz pour capturer des images.
Cette commande est principalement utilisée pour déclencher l’exécution du projet Mech-Viz. Cette commande peut également remplir les fonctions suivantes lorsque les paramètres correspondants sont configurés.
-
Si le projet Mech-Vision correspondant au service de vision du projet Mech-Viz possède des recettes de paramètres, cette commande peut être utilisée pour changer la recette de paramètres.
-
Si le projet Mech-Viz comporte une étape « Branch by Msg », cette commande peut être utilisée pour définir le port de sortie.
-
Si le mode de montage de la caméra est eye in hand ou si le point de départ de la planification de trajectoire dans Mech-Viz est un point enseigné, cette commande peut être utilisée pour envoyer la pose au moment de la capture d’image ou le point enseigné au projet Mech-Viz.
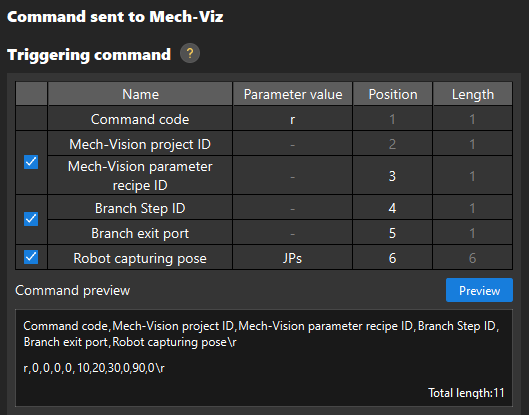
Configurez Commande de déclenchement conformément aux explications du tableau ci-dessous.
Nom : Les noms des paramètres dans la commande.
Valeur du paramètre : La valeur d’un paramètre.
Position : La position d’un paramètre dans la commande. L’ordre des positions commence à 1. Deux positions sont séparées par une virgule.
Longueur : Le nombre de champs au sein d’une valeur de paramètre. (Un champ est la donnée entre deux délimiteurs de chaîne adjacents.
Relation entre Position et Longueur : La position d’un paramètre est égale à la position du paramètre précédent plus la longueur du paramètre précédent.
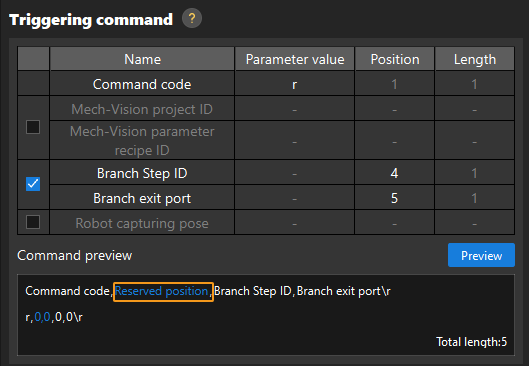
Nom Valeur du paramètre Position Longueur Code de commande
Le code pour déclencher l’exécution du projet Mech-Viz. La valeur par défaut est r. La valeur peut être modifiée.
1 (valeur fixe)
1 (valeur fixe)
ID du projet Mech-Vision (facultatif)
L’ID du projet Mech-Vision, un entier positif.
2 (valeur fixe)
1 (valeur fixe)
ID de la recette de paramètres Mech-Vision (facultatif)
L’ID de la recette de paramètres dans le projet Mech-Vision, un entier positif.
Valeur définie par l’utilisateur
1 (valeur fixe)
ID de l’étape de branchement (facultatif)
L’ID de l’étape « Branch by Msg ». Applicable lorsque le projet Mech-Viz possède une seule étape « Branch by Msg ».
Valeur définie par l’utilisateur
1 (valeur fixe)
Port de sortie de branchement (facultatif)
Le port de sortie de l’étape « Branch by Msg ». Par exemple, si la valeur du paramètre est 0, l’étape « Branch by Msg » prendra le port 0 comme sortie.
Valeur définie par l’utilisateur
1 (valeur fixe)
Pose de capture du robot (facultatif)
Si le mode de montage de la caméra est eye in hand, cette commande transmet au projet Mech-Viz la pose du robot au moment de la capture d’image. Valeur : JPs ou JPs+Flange pose
Valeur définie par l’utilisateur
-
Si vous avez sélectionné « Angles d’Euler » pour le paramètre « Format de rotation » :
-
Lorsque la valeur du paramètre est « JPs », la longueur est fixée à 6.
-
Lorsque la valeur du paramètre est « JPs+Flange pose », la longueur est fixée à 12.
-
-
Si vous avez sélectionné « Quaternion » pour le paramètre « Format de rotation » :
-
Lorsque la valeur du paramètre est « JPs », la longueur est fixée à 6.
-
Lorsque la valeur du paramètre est « JPs+Flange pose », la longueur est fixée à 13.
-
-
Si une valeur dans les colonnes Valeur du paramètre, Position et Longueur n’est pas grisée, les utilisateurs peuvent cliquer dessus pour modifier la valeur si nécessaire.
-
Le code de commande doit être unique entre différentes commandes.
-
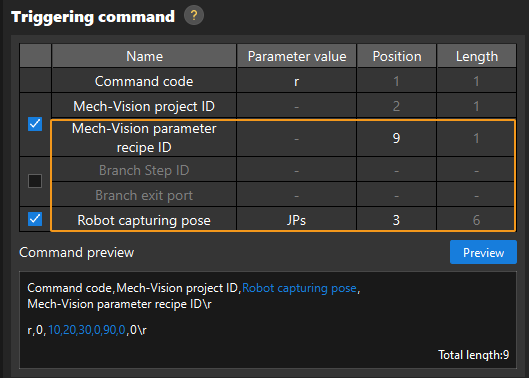
Assurez-vous que les champs occupés par différents paramètres ne se chevauchent pas. Par exemple, dans l’image ci-dessous, la position et la longueur de « pose de capture du robot » sont respectivement 3 et 6. Si la position et la longueur de « ID de la recette de paramètres » sont respectivement 4 et 1, alors le deuxième champ de « pose de capture du robot » se chevauchera avec la position de « ID de la recette de paramètres ». Si la position de « ID de la recette de paramètres » est égale ou supérieure à 9, « ID de la recette de paramètres » et « pose de capture du robot » ne se chevaucheront pas.
-
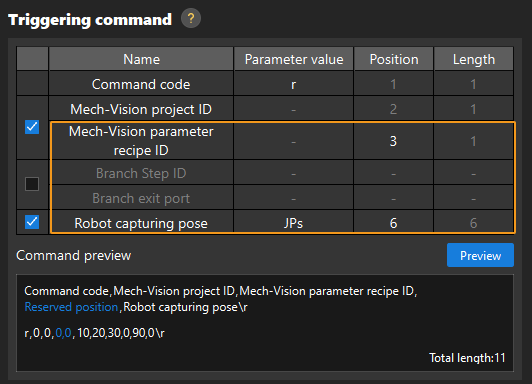
Il peut y avoir des champs vides entre les valeurs des paramètres. En prévisualisation, le champ vide est décrit comme la position réservée et rempli de 0. Par exemple, si la position et la longueur de « ID de la recette de paramètres » sont respectivement 3 et 1 ; et que la position et la longueur de « pose de capture du robot » sont respectivement 6 et 6, les positions 4 et 5 sont des champs vides et seront remplies de 0. Si la position de « pose de capture du robot » est changée à 4, il n’y aura pas de champ vide entre cette valeur de paramètre et celle de « ID de la recette de paramètres ». Il est recommandé d’attribuer une valeur appropriée à « position » pour éviter les champs vides.
-
Si le projet Mech-Viz comporte plus d’une étape « Branch by Msg », vous pouvez réserver des positions pour l’ID de l’étape de branchement et le port de sortie de branchement pour faciliter le développement ultérieur du programme d’adaptateur.
-
-
Après avoir terminé les configurations ci-dessus, cliquez sur Aperçu pour générer un exemple de commande.
Dans la zone de texte Aperçu de la commande, les utilisateurs peuvent survoler le nom du champ pour voir la donnée correspondante, qui sera mise en surbrillance.
Définir les paramètres d’étape de Mech-Viz (facultatif)
Si vous devez définir des paramètres d’étape pour Mech-Viz, sélectionnez Définir les paramètres d’étape de Mech-Viz pour configurer la commande qui définit les valeurs des paramètres d’étape.
-
Décidez s’il faut sélectionner Fusionner avec la commande de déclenchement.
« Fusionner avec la commande de déclenchement » signifie ajouter les paramètres d’étape définis pour Mech-Viz à la commande de déclenchement. La commande Définir les paramètres d’étape de Mech-Viz peut être soit fusionnée avec la commande qui déclenche Mech-Viz pour capturer des images, soit utilisée comme une commande individuelle. Dans ce dernier cas, cette commande doit être appelée avant la commande de déclenchement.
-
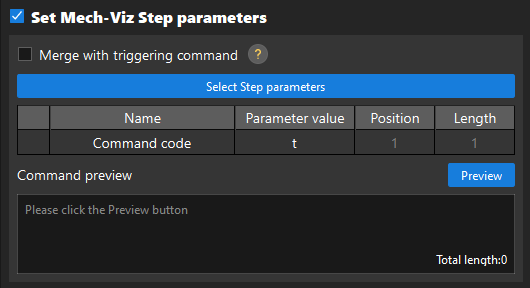
Si Fusionner avec la commande de déclenchement n’est pas sélectionné, configurez la commande qui définit les paramètres d’étape de Mech-Viz selon les descriptions du tableau ci-dessous, puis exécutez la deuxième étape.
Nom
Valeur du paramètre
Position
Longueur
Code de commande
Le code pour définir les paramètres d’étape de Mech-Viz. La valeur par défaut est t. La valeur peut être modifiée.
1 (valeur fixe)
1 (valeur fixe)
-
Si Fusionner avec la commande de déclenchement est sélectionné, les noms et valeurs de paramètres dans le tableau ci-dessus seront fusionnés avec ceux configurés pour la commande de déclenchement.
-
-
Sélectionner des paramètres d’étape.
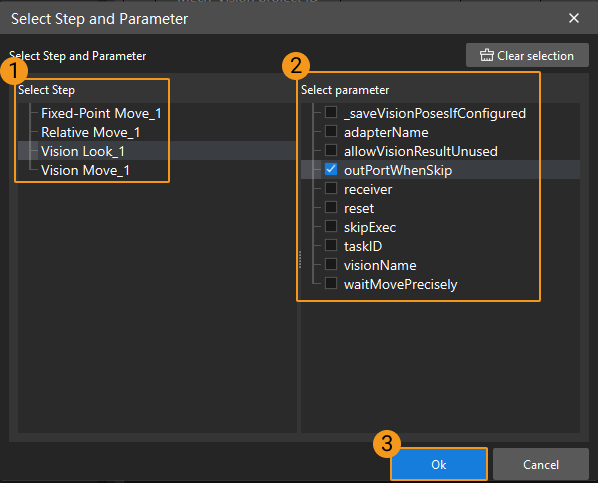
Cliquez sur Sélectionner des paramètres d’étape, puis sélectionnez des étapes et des paramètres dans la fenêtre contextuelle en suivant les instructions ci-dessous.
-
Cliquez sur l’étape à configurer dans la liste Sélectionner une étape.
-
Sélectionnez les paramètres nécessaires dans la liste Sélectionner un paramètre.
-
Cliquez sur OK.
-
Si Définir les paramètres d’étape de Mech-Viz est sélectionné, vous devez sélectionner au moins un paramètre d’étape. Sinon, l’avertissement ci-dessous apparaîtra.
-
Les utilisateurs peuvent sélectionner plusieurs étapes et paramètres.
-
Si le type de données booléen est adopté par les valeurs de paramètres d’étape, alors 1 et 0 représentent respectivement vrai et faux.
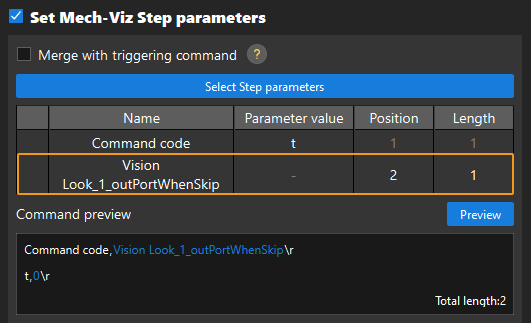
Prenons la configuration ci-dessus comme exemple. Après avoir cliqué sur OK, la zone « Définir les paramètres d’étape de Mech-Viz » est la suivante.
-
-
Assurez-vous que les champs occupés par différents paramètres ne se chevauchent pas.
-
Il peut y avoir des champs vides entre les valeurs des paramètres. Il est recommandé d’attribuer une valeur appropriée à « position » pour éviter les champs vides.
-
-
Après avoir terminé les configurations ci-dessus, cliquez sur Aperçu pour générer un exemple de commande.
Obtenir le nom du robot auprès de Mech-Viz
| Avant de commencer, assurez-vous que le projet Mech-Viz est défini sur autoload. Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Autoload Project. |
-
Cliquez sur Obtenir, et la zone de texte du nom du robot affichera le nom du modèle de robot utilisé par le projet Mech-Viz.
-
Si le nom du robot obtenu depuis Mech-Viz est différent du nom du robot obtenu depuis Mech-Vision, modifiez le nom du robot dans les projets Mech-Vision ou Mech-Viz pour assurer la concordance.
-
Après avoir terminé la configuration ci-dessus, cliquez sur Suivant pour entrer dans l’onglet de configuration Sortie Mech-Viz.
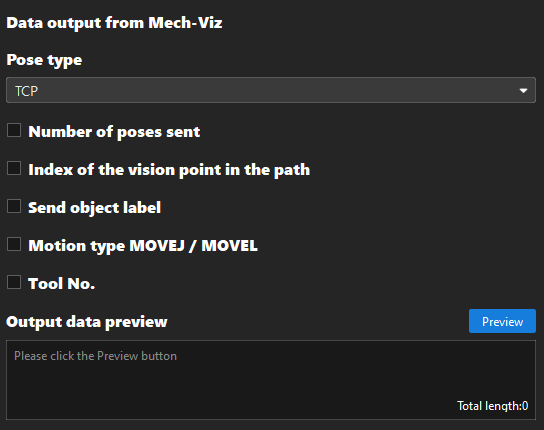
Configurer « Sortie Mech-Viz »
Sur l’onglet Sortie Mech-Viz, définissez les formats de commandes renvoyés par Mech-Viz au robot ou à l’ordinateur hôte. Les entrées de configuration incluent Type de pose, Nombre de poses envoyées, Indice du point de vision dans le trajet, Envoyer l’étiquette de l’objet et Type de mouvement MOVEJ/MOVEL, ainsi que N° d’outil.
-
Définissez les entrées de configuration selon la description ci-dessous.
Entrée de configuration
Description
Type de pose
Options de valeur : JPs ou TCP. La valeur par défaut est TCP.
Nombre de poses envoyées
Les données renvoyées par Mech-Viz incluent le nombre de poses envoyées cette fois. Dans les données de sortie, la position du paramètre du nombre de poses se situe avant le(s) paramètre(s) de pose.
Indice du point de vision dans le trajet
La position du point de passage correspondant à l’étape « Vision Move » du projet Mech-Viz dans l’ensemble du trajet planifié.
Envoyer l’étiquette de l’objet
Lorsque cette option est sélectionnée, Mech-Viz retransmet les données renvoyées par le port labels dans Mech-Vision.
Type de mouvement MOVEJ / MOVEL
Le type de mouvement du point de passage. 1 représente MOVEJ, et 2 représente MOVEL.
N° d’outil
L’ID de l’outil utilisé par le robot au point de passage.
Dans le scénario où « Quaternion » est sélectionné pour « Format de rotation » sur l’onglet Paramètres de base, si « TCP » est sélectionné pour « Type de pose », chaque pose dans les données de sortie occupera 7 champs ; et si « JPs » est sélectionné pour « Type de pose », chaque pose dans les données de sortie occupera 6 champs.
-
Après avoir terminé les configurations ci-dessus, cliquez sur Aperçu pour générer un exemple de commande. Si l’aperçu des données correspond aux attentes, cliquez sur Suivant pour passer à l’onglet de configuration suivant.
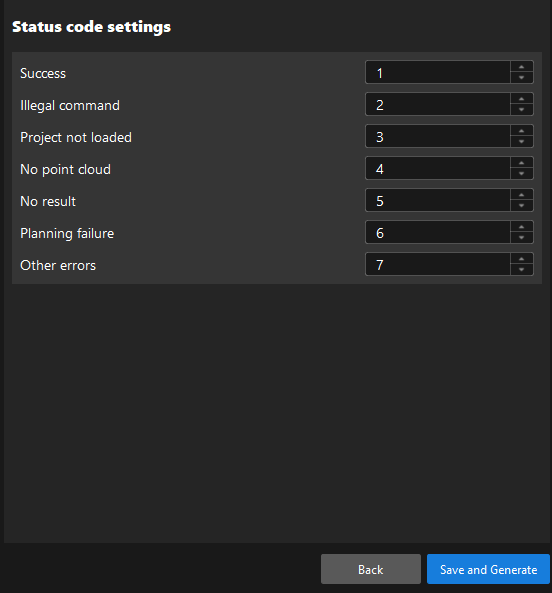
Configurer « Paramètres du code d’état »
-
Configurez des codes d’état pour différents résultats de traitement de commande sur l’onglet Paramètres du code d’état.
Par défaut, le Générateur d’adaptateur prend en charge 7 codes d’état. Les utilisateurs peuvent augmenter ou diminuer le nombre de codes d’état selon leurs besoins.
-
Diminuer les codes d’état : attribuez les mêmes codes d’état à des situations différentes. Par exemple, les utilisateurs peuvent définir les codes d’état de « Commande illégale » et « Projet non chargé » sur 2.
-
Augmenter les codes d’état : les utilisateurs peuvent modifier le fichier du programme d’adaptateur pour augmenter le nombre de codes d’état. Pour plus de détails, reportez-vous aux paragraphes concernant développement ultérieur.
-
-
Cliquez sur Enregistrer et générer après avoir terminé la configuration ci-dessus. Si la fenêtre suivante s’affiche, la configuration est correcte. Cliquez sur Oui pour enregistrer toutes les configurations.
Déployer le programme d’adaptateur
Après avoir configuré le Générateur d’adaptateur, les utilisateurs peuvent déployer le programme dans le projet en suivant les étapes ci-dessous.
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Effectuez les réglages suivants dans la fenêtre Configuration de la communication du robot.
-
Sélectionnez un modèle de robot, puis cliquez sur Suivant.
-
Sélectionnez Adaptateur pour Type de service d’interface.
-
Cliquez sur
 dans la zone de texte de Répertoire du projet d’adaptateur. Sélectionnez un fichier de projet d’adaptateur dans l’explorateur de fichiers qui s’affiche.
dans la zone de texte de Répertoire du projet d’adaptateur. Sélectionnez un fichier de projet d’adaptateur dans l’explorateur de fichiers qui s’affiche. -
(Facultatif) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur le bouton Appliquer.

-
-
Assurez-vous que le service d’interface est démarré: l’interrupteur « Configuration de la communication du robot » sur la barre d’outils de Mech-Vision est basculé et devient bleu.

Maintenant, vous avez terminé de créer un projet d’adaptateur.
Explications supplémentaires
Après avoir terminé les configurations ci-dessus, le dossier de programme d’adaptateur généré sera enregistré dans le dossier communication du répertoire de la solution. Le nom du dossier du programme d’adaptateur correspondra au nom du projet d’adaptateur défini dans le Générateur d’adaptateur. La structure du dossier communication est la suivante.
communication
├─adapter_generator_config.json (Ce fichier contient les configurations définies dans l'Adapter Generator.)
│
└─XX (Ce dossier contient les fichiers suivants. « XX » représente le nom du projet Adapter.)
├─XX_adapter.py (Il s'agit du fichier du programme Adapter généré sur la base des paramètres configurés dans l'Adapter generator.)
├─XX_widget.py (Ce fichier définit des éléments d'interface pour l'interface graphique. Par défaut, le programme Widget est désactivé.)
├─__init__.py (Ce fichier définit quels sous-packages et modules sont accessibles lors de l'importation du package. L'utilisateur peut utiliser ce fichier pour activer ou désactiver les programmes Adapter et Widget.)|
Si vous devez activer le programme Widget, décommentez la ligne ci-dessous dans le fichier __init__.py. |
De plus, les utilisateurs peuvent développer davantage le programme d’adaptateur généré pour réaliser des fonctionnalités plus avancées. Par exemple, vous pouvez ajouter le code ci-dessous au fichier XX_adapter.py pour définir le code d’état de TIMEOUT à 8.
status_code_dict = {ms.SUCCESS: 1, ms.INVALID_COMMAND: 2, ms.PROJECT_NOT_LOADED: 3,
ms.NO_POINT_CLOUD: 4, ms.NO_RESULT: 5, ms.PLAN_FAILED: 6,
ms.OTHER_ERROR: 7, ms.TIMEOUT: 8}Ajoutez le code ci-dessous pour lever l’erreur TIMEOUT.
raise AdapterError(ms.TIMEOUT)Pour plus de détails sur la programmation de l’adaptateur, reportez-vous aux documents ci-dessous :