Configuration de la communication Master-Control
Ce guide explique comment configurer la communication Master-Control avec un robot Hyundai.
Préparation
Vérifier la version du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
Version du contrôleur du robot: Hi5a-S et Hi5-N (Hi5a-T10 n’est pas pris en charge).
Configurer la connexion réseau
Connecter le matériel
Branchez le câble Ethernet de l’IPC sur le port CNETN3 à l’intérieur du contrôleur ou sur le port Ethernet extérieur, comme illustré ci-dessous.
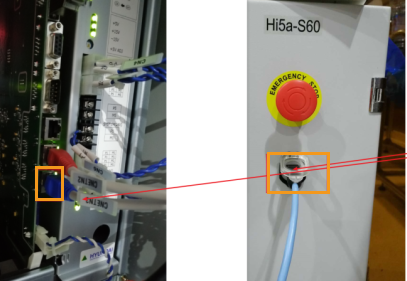
| Il y a trois ports à l’intérieur du contrôleur, à savoir CNETN1, CNETN2 et CNETN3, qui correspondent respectivement à l’adresse EN0, à l’adresse TP et à l’adresse Ethernet utilisateur EN2 sur le pupitre de commande. Par conséquent, le câble Ethernet doit être connecté au port CNETN3. |
Configurer l’adresse IP
-
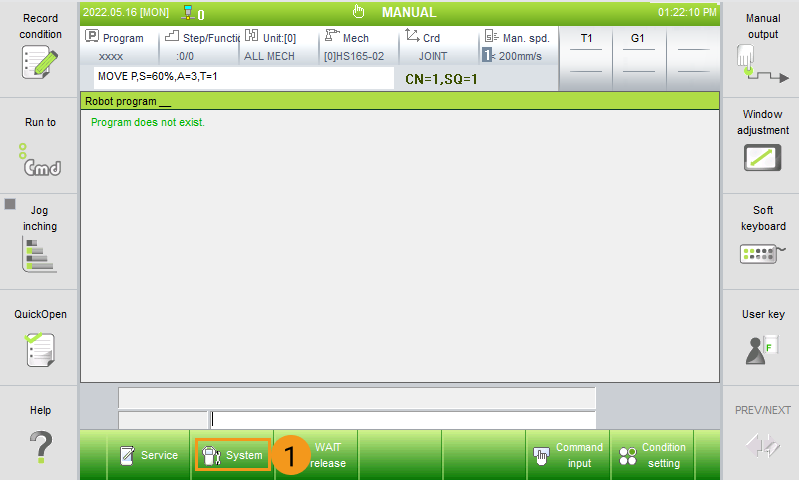
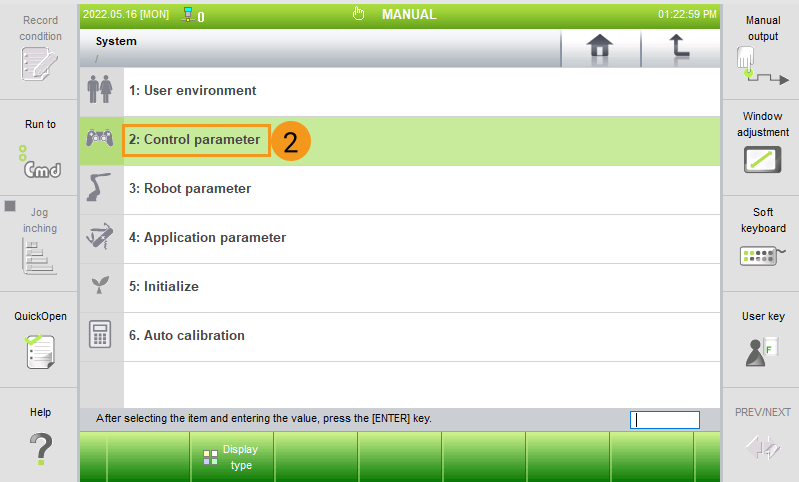
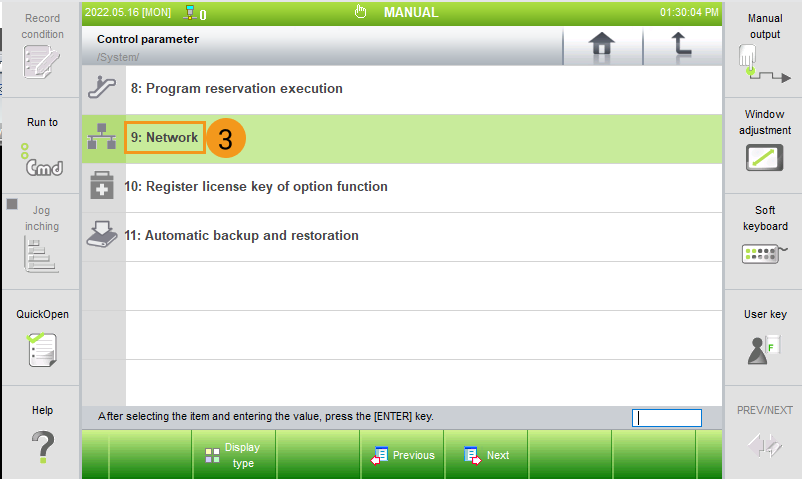
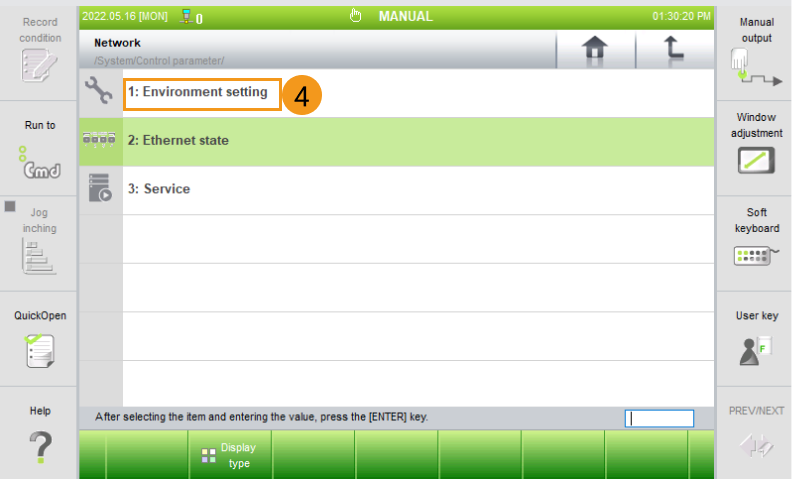
Sur le pupitre de commande, allez à .
-
Sélectionnez EN2(Public), et définissez la bonne Adresse IP. Assurez-vous également que le Masque de sous-réseau est réglé sur 255.255.255.0.

-
L’IP du robot doit être dans le même sous-réseau que l’IPC.
-
Le masque de sous-réseau de l’IPC est identique à celui du robot, à savoir 255.255.255.0.
-
Redémarrez le robot après avoir modifié l’adresse IP.
-
Charger les fichiers de programme sur le robot
-
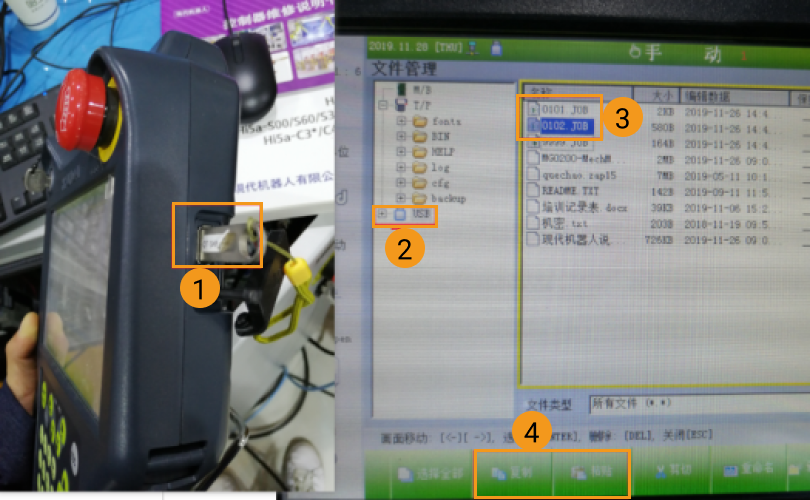
Connectez la clé USB au pupitre de commande.
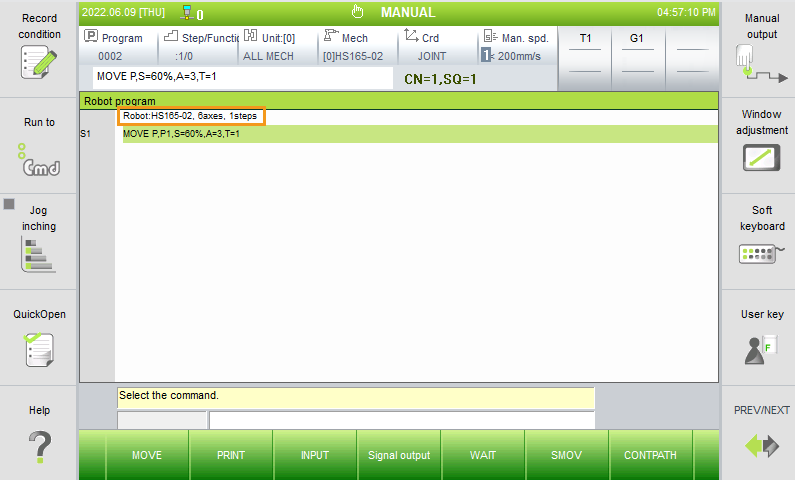
Pour contrôler un robot HYUNDAI, vous devez modifier les informations de Version du format du fichier de programme dans les premières lignes des programmes Master-Control 0101.JOB et* 0102.JOB*.
Si vous disposez déjà d’un autre programme disponible sur le robot, copiez et collez directement le programme sur la clé USB et passez à l’étape 5. -
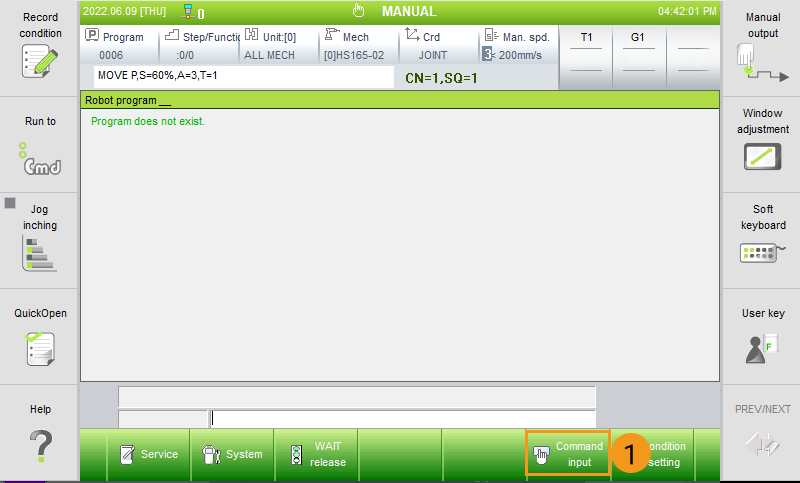
Sélectionnez Saisie de commande.
-
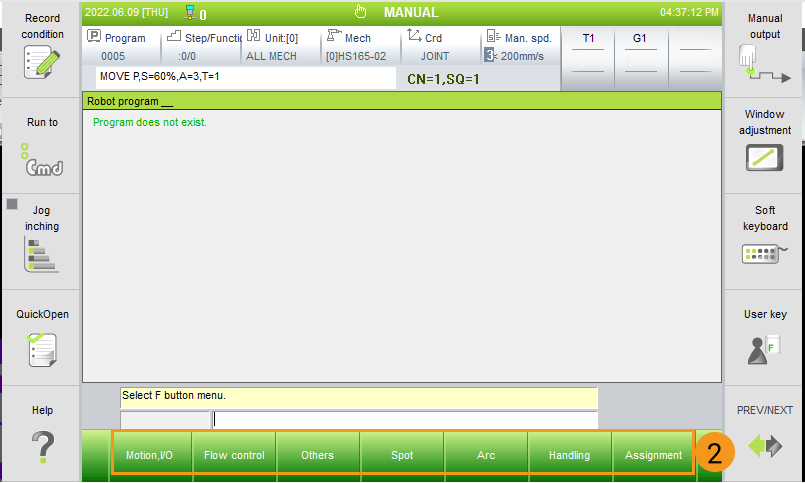
Choisissez l’une des commandes à saisir, comme indiqué ci-dessous.
-
Vous pouvez maintenant voir les informations de version du robot en haut. Ensuite, enregistrez le programme.
-
Sélectionnez le fichier de programme nouvellement créé (ou un fichier de programme précédent), puis sélectionnez Copier. Basculez ensuite vers le dossier USB et sélectionnez Coller.
-
Connectez la clé USB à l’IPC. Ouvrez le programme, puis copiez la première ligne.
-
Accédez à
Communication Component/Robot_Server/Robot_FullControl/hyundai/Hi5a-Sdepuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Ouvrez les deux fichiers de programme Master-Control 0101.JOB et 0102.JOB. Remplacez la première ligne des deux fichiers par le code copié, puis enregistrez les modifications.
-
Copiez et collez les fichiers de programme Master-Control 0101.JOB et 0102.JOB sur la clé USB. Connectez la clé USB au pupitre de commande. Allez à , et sélectionnez 0101.JOB et 0102.JOB, puis sélectionnez Copier. Basculez ensuite vers T/P, sélectionnez Coller pour charger les fichiers sur le robot.
Configuration supplémentaire
-
Changez l’adresse IP de l’IPC en 192.168.0.150.
-
Cette adresse IP est une valeur par défaut spécifiée dans 0101.JOB et 0102.JOB. Si vous devez changer l’adresse IP, modifiez l’adresse IP dans les programmes en conséquence.
-
La nouvelle adresse IP doit se trouver dans le même sous-réseau que celui du contrôleur du robot.
-
-
Définissez l’adresse IP de gestion du routeur sur 192.168.0.1.
-
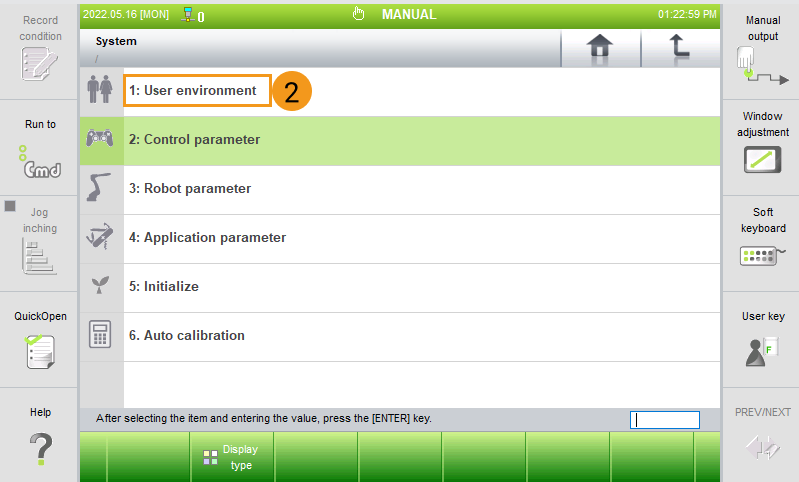
Allez à .
-
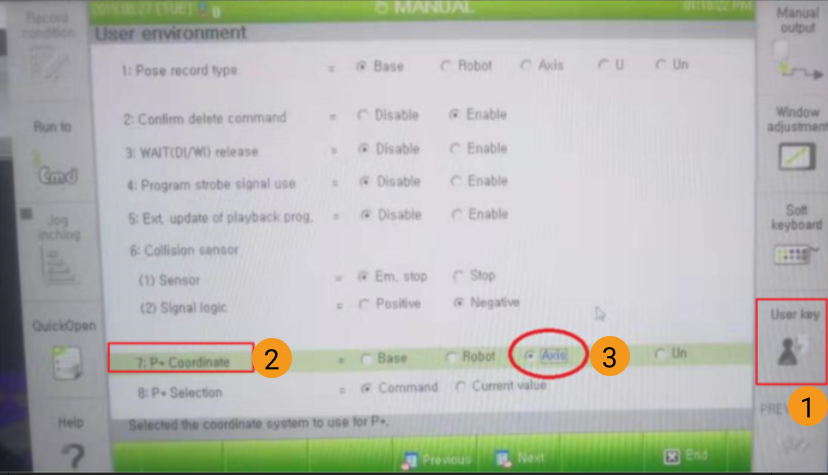
Sélectionnez Clé utilisateur, et saisissez 314 pour demander l’autorisation.
-
Changez la P Coordonnée* en Axe.
-
Sélectionnez Axe directement à l’écran.
-
Appuyez sur
SHIFTsur le pupitre de commande et appuyez simultanément sur les flèches gauche ou droite pour vous déplacer vers la gauche ou la droite.
Si les informations d’articulation n’ont pas été modifiées, le message d’erreur suivant apparaîtra en arrière-plan.

-
Tester la communication Master-Control
-
Passez le robot en mode AUTO.
-
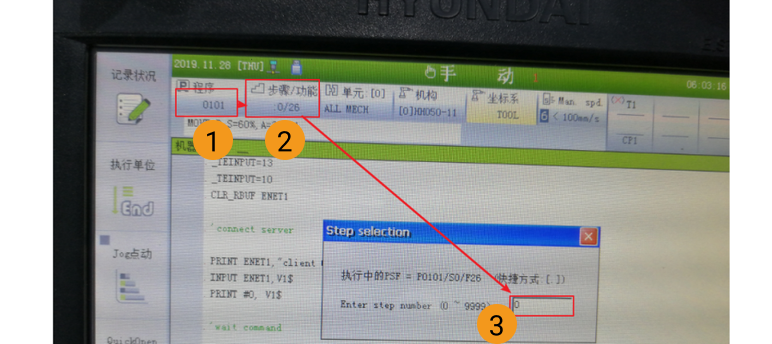
Réinitialisez les étapes du programme du robot à 0 pour les programmes 101 et 102. Sélectionnez , puis saisissez 0 dans la fenêtre contextuelle de sélection d’étape.
Exécutez le programme 101.JOB. -
Connectez le robot. Plus précisément, l’adresse IP du robot doit être définie sur l’adresse IP réelle de l’IPC.
Reconnecter le robot
-
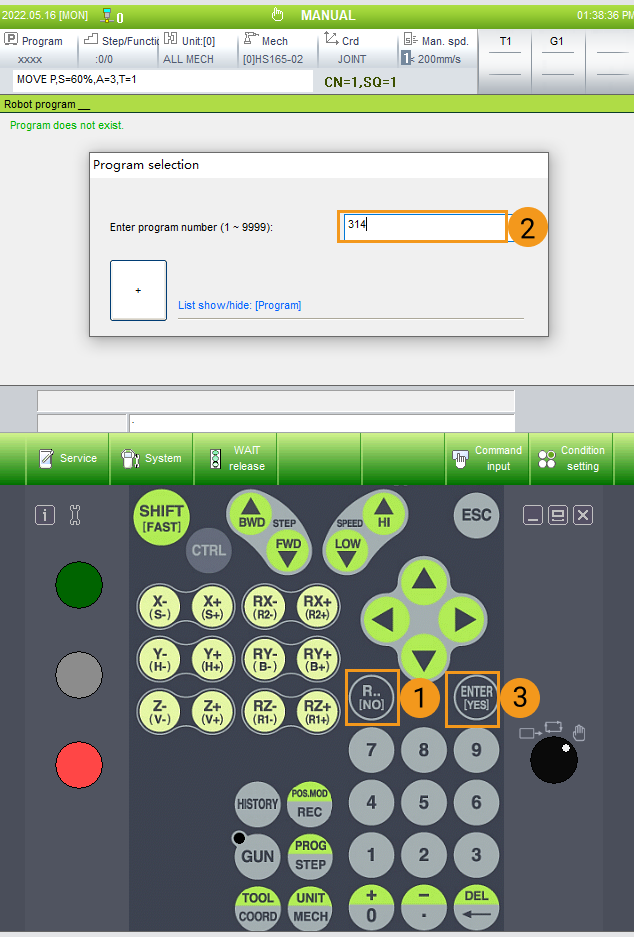
En mode apprentissage, appuyez sur R.. [NON], saisissez 314 puis appuyez sur ENTER [OUI] pour demander l’autorisation.
-
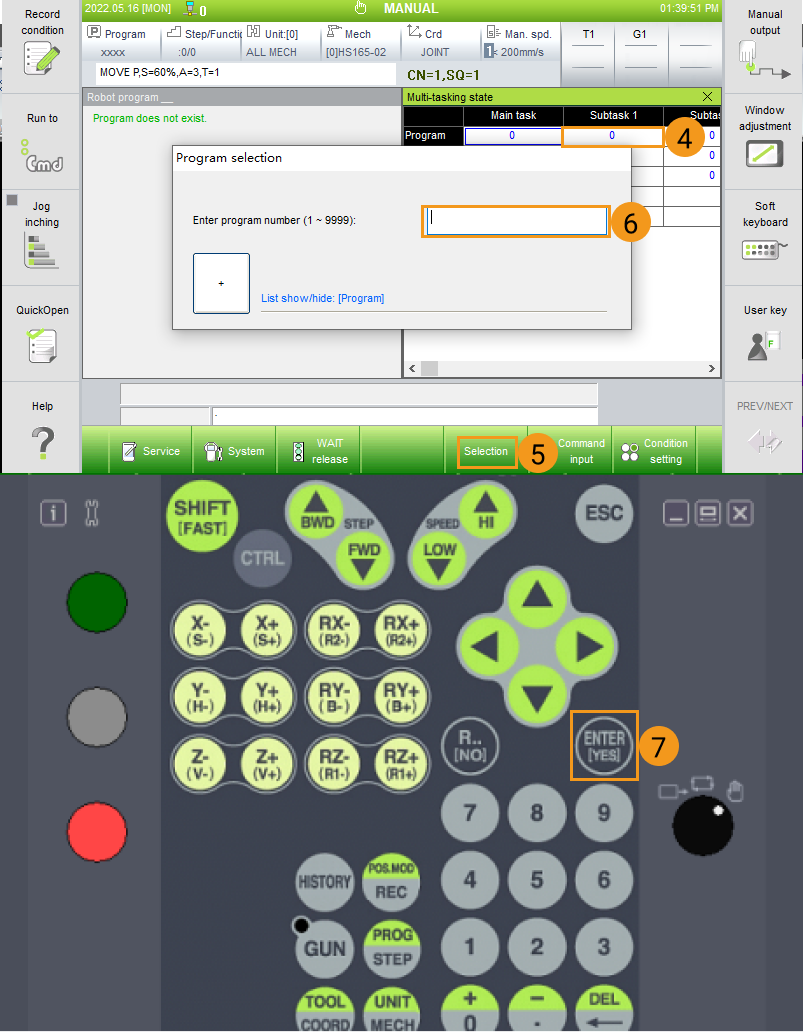
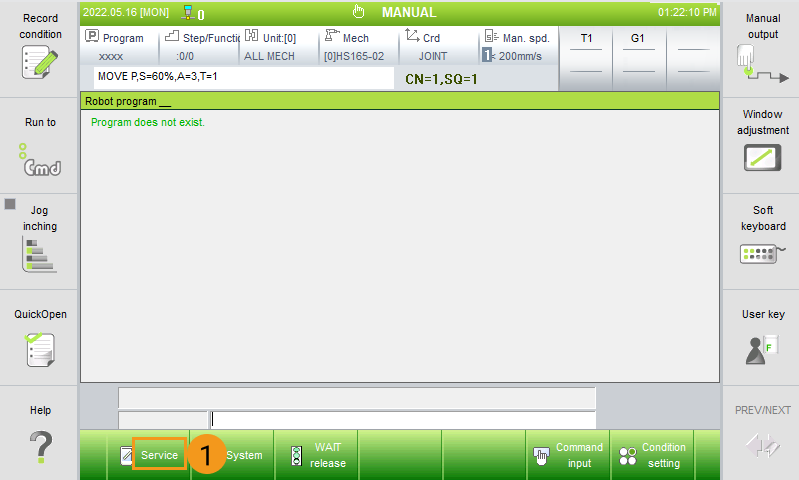
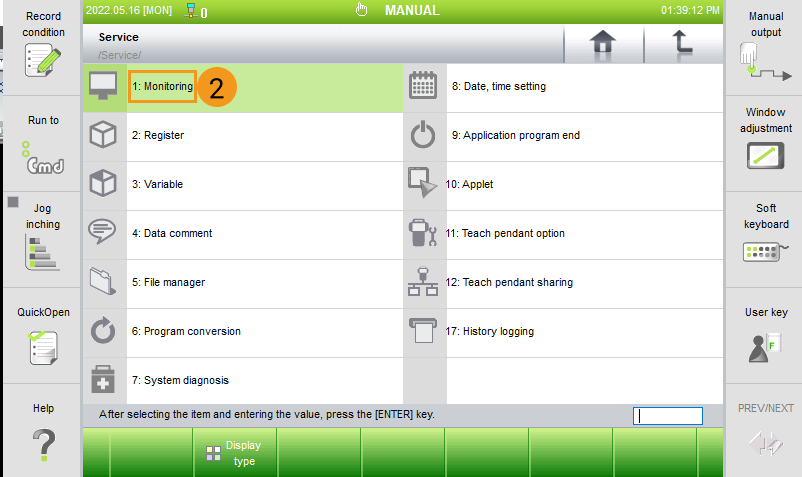
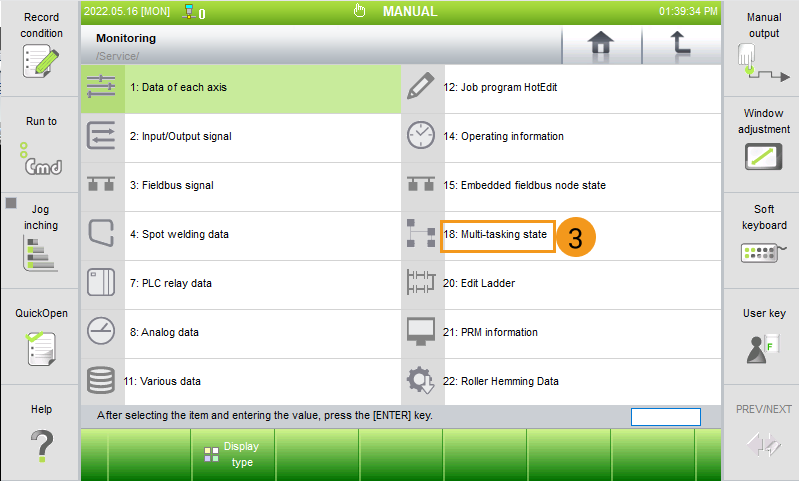
À chaque reconnexion du robot, les tâches d’arrière-plan doivent être arrêtées et l’étape du programme au premier plan doit être réinitialisée à 0. Sélectionnez Service‣ Surveillance ‣ État multitâche ‣ ENTER [OUI] pour entrer dans l’interface multitâche.
-
Sélectionnez Programme (Sous-tâche) puis sélectionnez Sélection. Saisissez 3 dans la fenêtre de Sélection de programme puis appuyez sur
ENTER [OUI]pour terminer la configuration.