Configurer la communication de l’Interface Standard avec ESTUN
Ce guide explique comment charger les fichiers du programme de l’Interface Standard sur un robot ESTUN et configurer la communication de l’Interface Standard entre le système de vision Mech-Mind et le robot.
| Dans cette section, vous allez charger le programme d’Interface Standard du robot ainsi que les fichiers de configuration dans le système du robot afin d’établir la communication de l’Interface Standard entre le système de vision et le robot. |
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
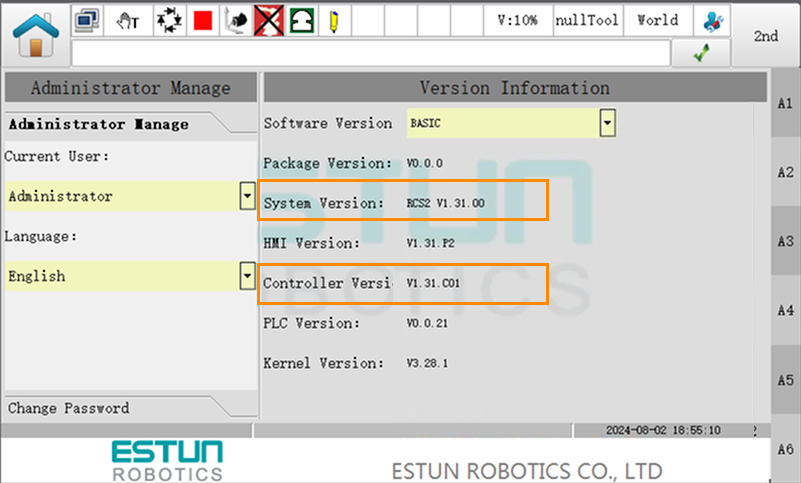
Version du système : RCS2 V1.31
-
Version du contrôleur : V1.31
N’utilisez pas la version du contrôleur V1.35. Cette version est incompatible avec le système de vision et ne peut pas communiquer correctement.
Vous pouvez vérifier les informations de version en appuyant sur Connexion utilisateur sur l’écran principal du boîtier d’enseignement.
Configurer la connexion réseau
Connecter le matériel
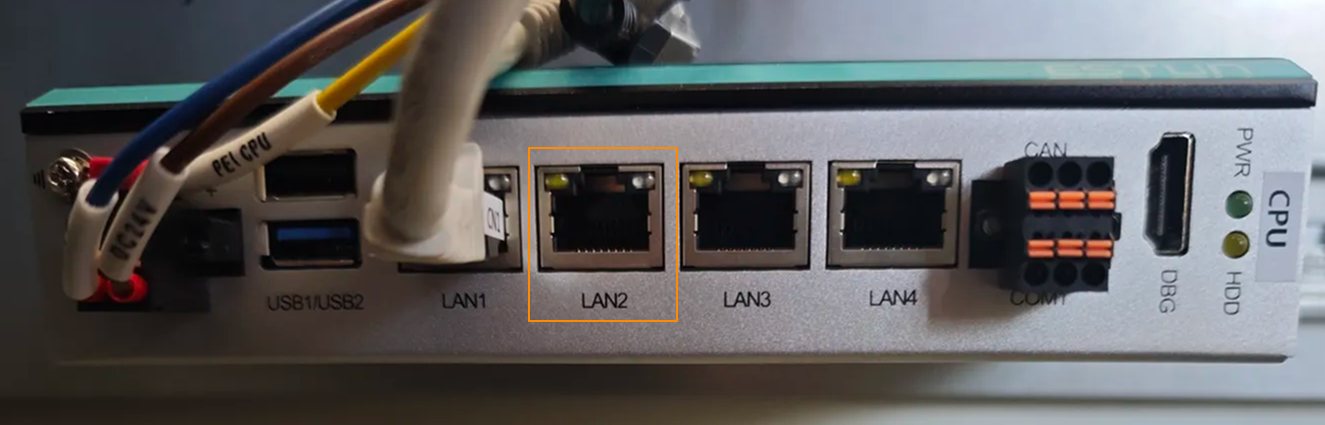
Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port LAN2 ou LAN3 du contrôleur.
|
Définir l’adresse IP
-
Sur le boîtier d’enseignement, passez en mode enseignement, puis appuyez sur Connexion utilisateur sur l’écran principal. Dans la liste déroulante Utilisateur actuel, sélectionnez Administrateur et saisissez le mot de passe (par défaut : 000000) pour passer en mode administrateur.
-
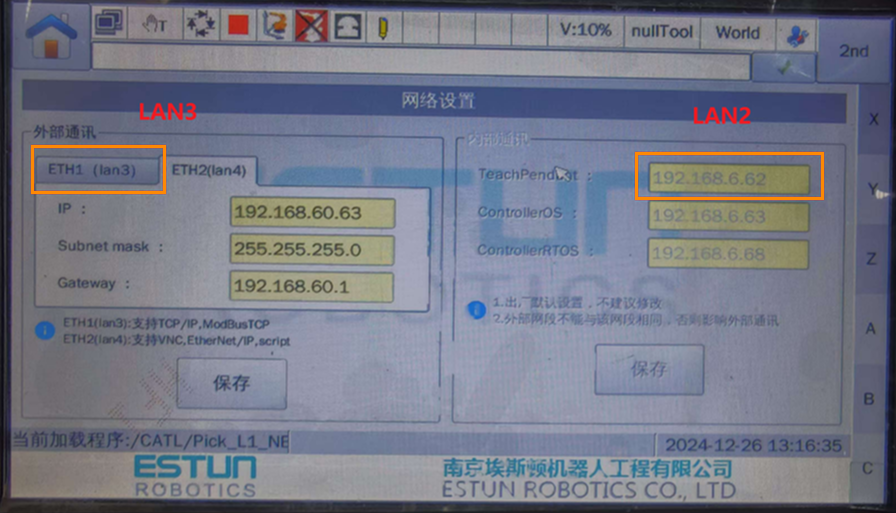
Après vous être connecté en tant qu’administrateur, retournez à l’écran principal et accédez à . Vérifiez ou modifiez l’adresse IP du port réseau sélectionné.
-
Sur l’IPC, définissez l’adresse IP afin de vous assurer qu’elle se trouve dans le même sous-réseau que le contrôleur. Utilisez la commande ping pour tester et confirmer que la connexion réseau est réussie.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
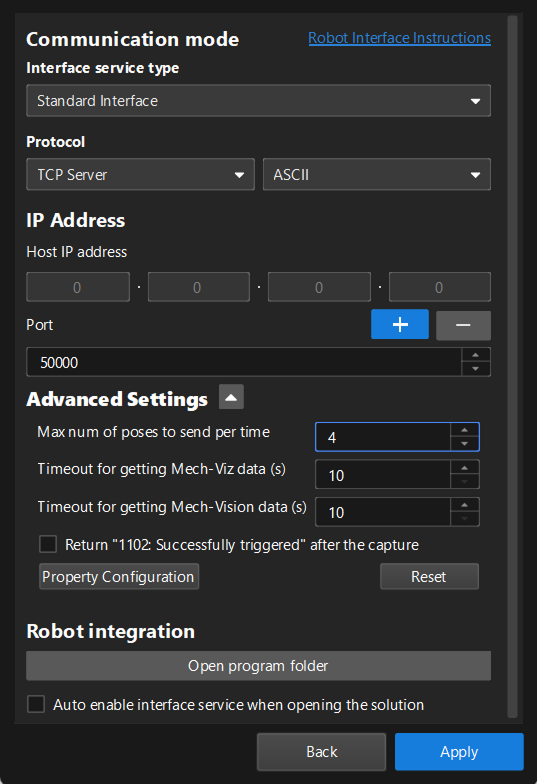
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Dans la section Paramètres avancés, définissez Nombre maximal de poses à envoyer à la fois sur 4.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
-
Si vous souhaitez charger manuellement des fichiers de programme, vous devez effectuer cette étape. Sinon, ignorez cette étape.
-
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier.
-
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Sauvegarde
Avant de charger des fichiers sur le robot, il est recommandé de sauvegarder les programmes originaux du robot. Cela permet une restauration en cas de manipulation accidentelle.
-
Insérez la clé USB dans le port USB du boîtier d’enseignement。
-
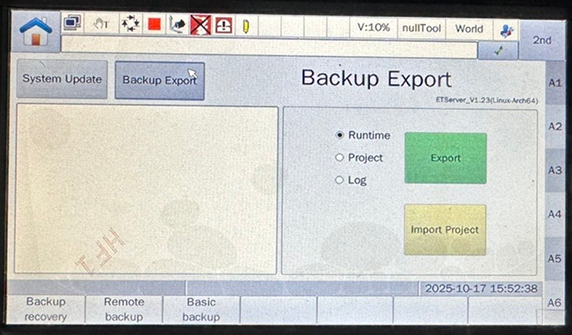
En mode enseignement, passez en mode administrateur, puis revenez à l’écran principal et accédez à . L’interface Exportation de sauvegarde apparaîtra。
-
Choisissez le type d’exportation souhaité (incluant Runtime, Projet et Journal) selon les besoins, puis appuyez sur Exporter. Il vous sera demandé de saisir le mot de passe administrateur (par défaut : 000000) pour confirmer l’opération. Après confirmation, la demande d’exportation sera envoyée au contrôleur。
Si la clé USB n’est pas insérée, un message s’affichera pour demander d’insérer une clé USB。 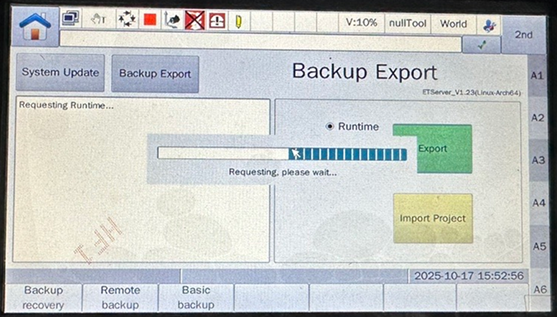
-
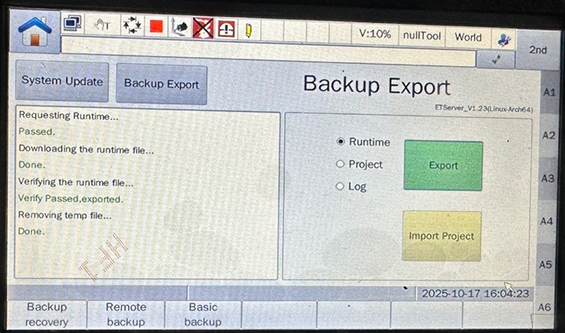
Après approbation de la demande d’exportation, une boîte de dialogue pour renommer le fichier d’export s’affichera. Saisissez le nom d’export souhaité et confirmez pour commencer l’exportation des fichiers sélectionnés. Une fois l’exportation terminée, l’état d’achèvement s’affichera comme montré ci-dessous. Après confirmation, retirez la clé USB en toute sécurité。
-
Ne retirez pas la clé USB avant la fin de l’exportation. Sinon, des fichiers peuvent être manquants ou corrompus.
-
L’exportation de la sauvegarde prend environ 5 à 10 minutes. Veuillez patienter.
-
Charger les fichiers du programme sur le robot
-
Sur l’IPC, ouvrez le dossier du programme (dossier
ESTUN) et accédez au dossierMM_Interface.er。Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/ESTUNdu répertoire d’installation de Mech-Vision et Mech-Viz. -
Utilisez un éditeur de texte pour ouvrir les fichiers
MM_AUTO_CALIBRATION.erpetMM_INIT_SKT.erp. Modifiez les valeurs de t_p.IP.value[1]~t_p.IP.value[4] et de t_p.PORT.value en fonction de la situation réelle. t_p.IP.value[1]~t_p.IP.value[4] correspondent aux quatre segments de l’adresse IP de l’IPC. t_p.PORT.value correspond au numéro de port hôte défini dans Mech-Vision。 -
Insérez une clé USB dans l’IPC et copiez le dossier
MM_Interface.erentier à la racine de la clé USB. Une fois la copie terminée, retirez la clé USB en toute sécurité。 -
Sur le boîtier d’enseignement, entrez en mode enseignement, puis appuyez sur Connexion utilisateur sur l’écran principal. Dans la liste déroulante Utilisateur actuel, sélectionnez Administrateur et saisissez le mot de passe (par défaut : 000000) pour passer en mode administrateur。
-
Insérez la clé USB dans le port USB du boîtier d’enseignement。

-
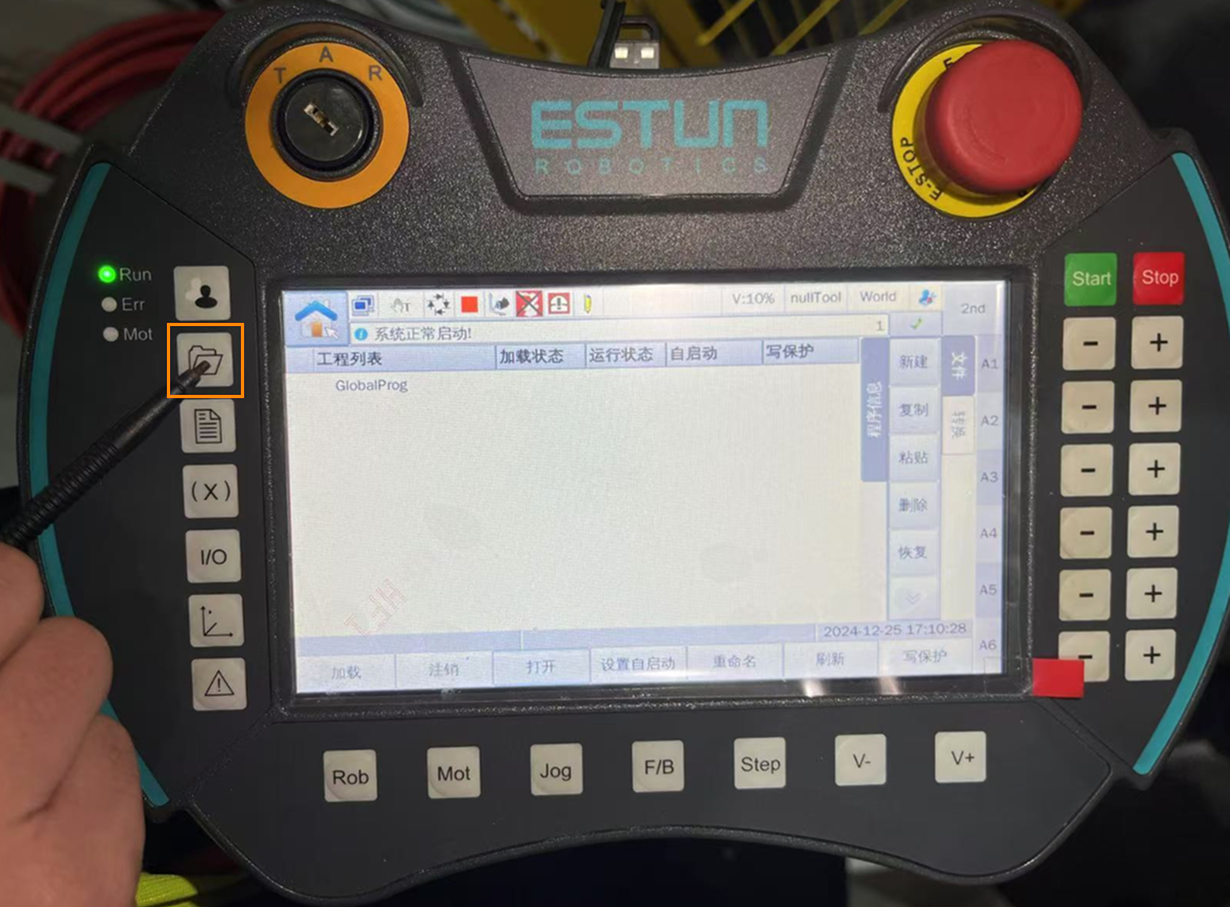
Appuyez sur le bouton dossier sur le boîtier d’enseignement。
-
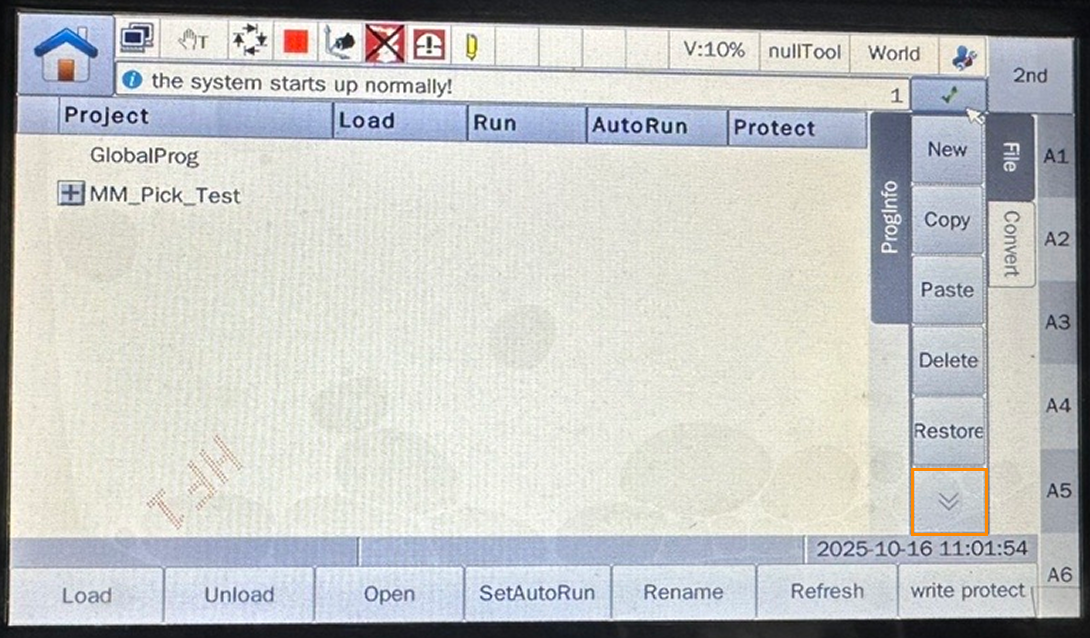
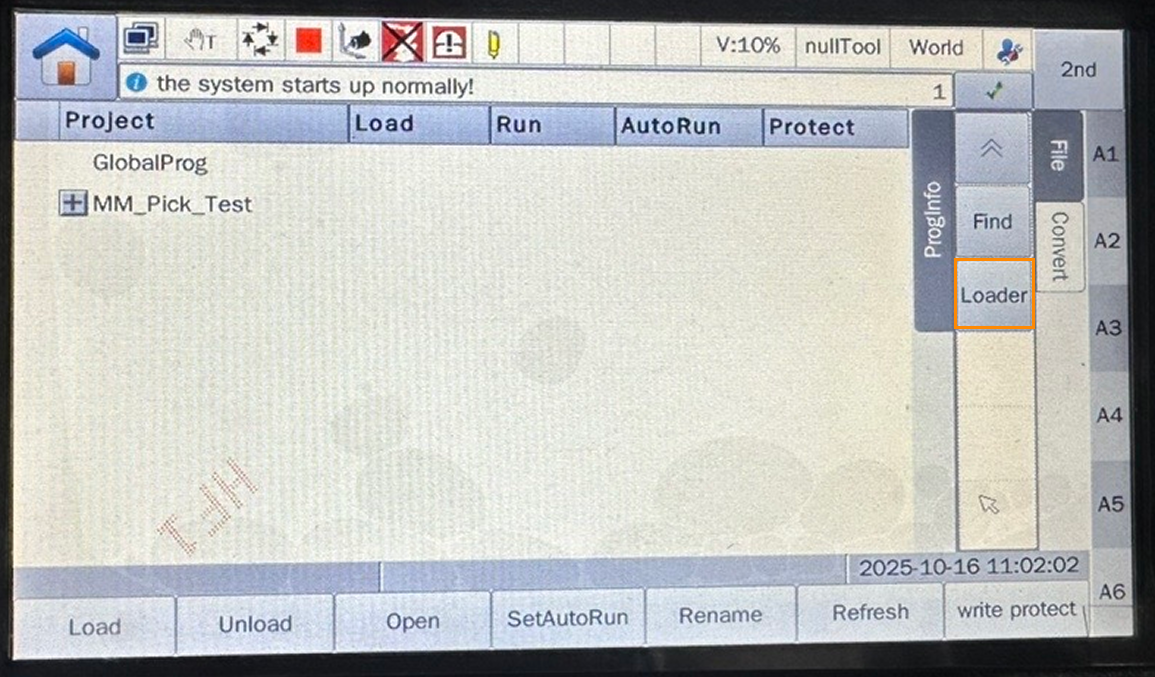
Appuyez sur l’icône Flèche vers le bas pour développer, puis allez à 。
-
Sélectionnez
MM_Interface.eret appuyez sur OK。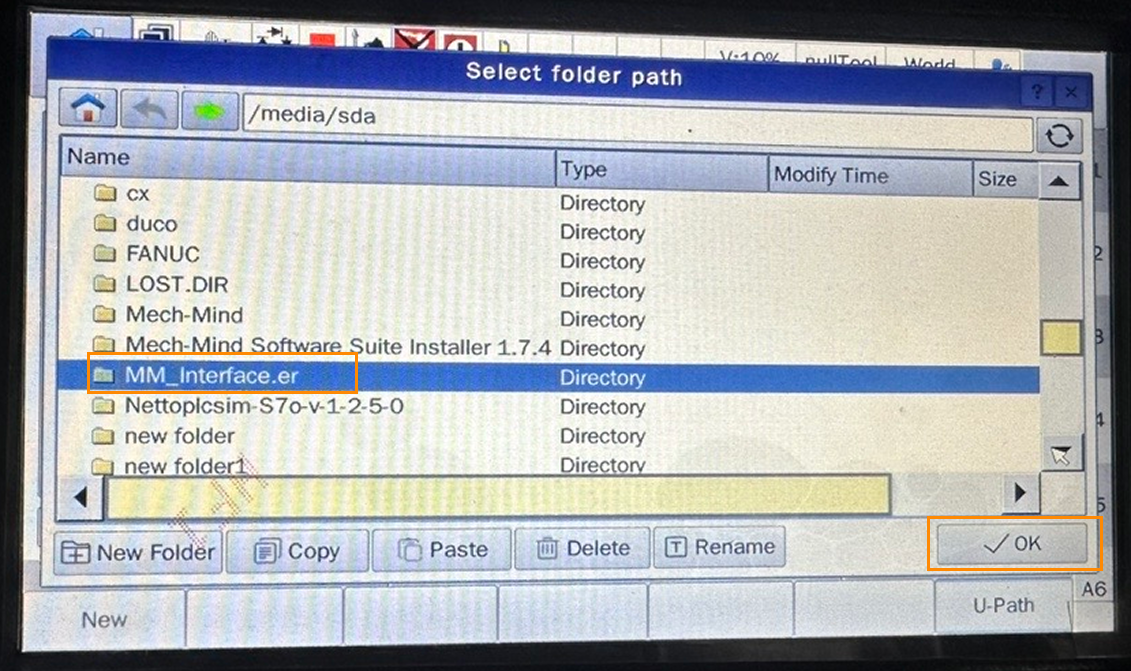
-
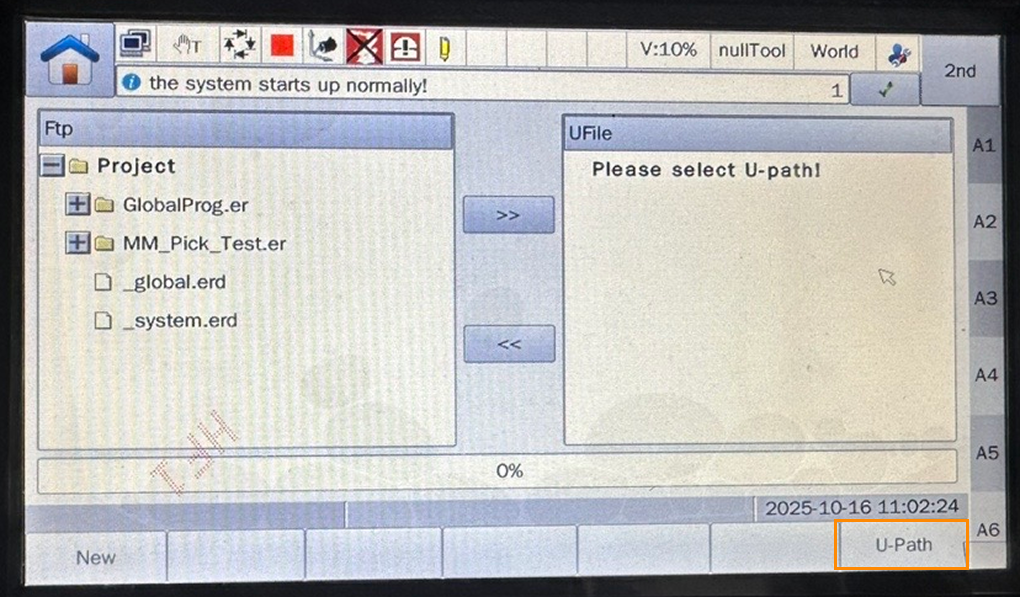
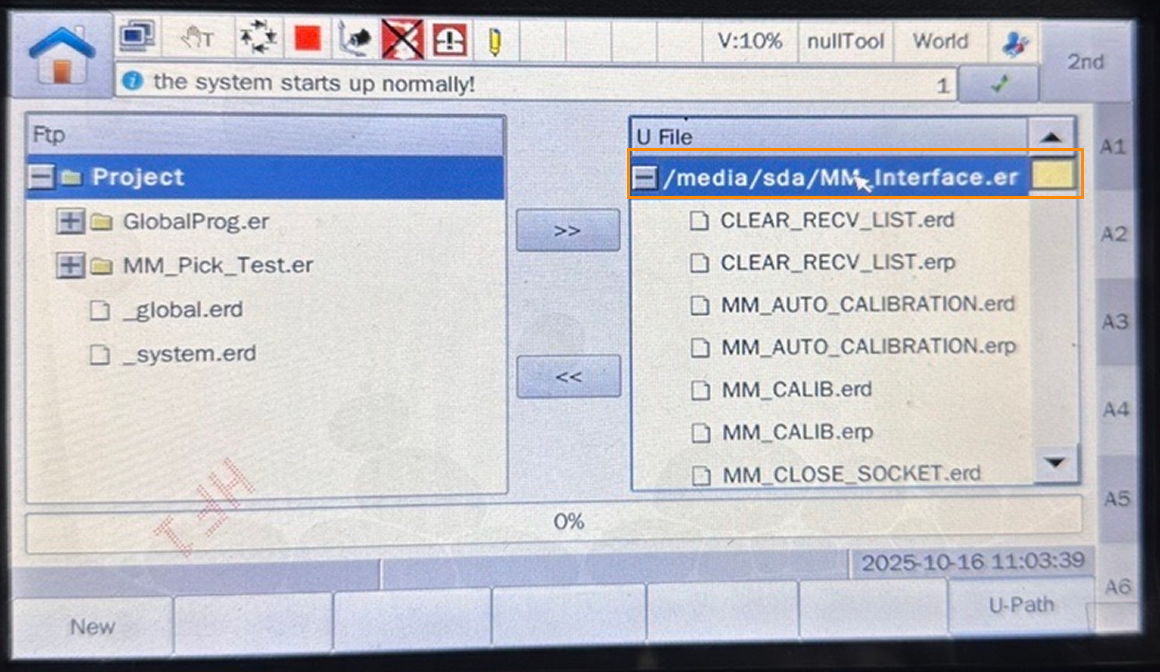
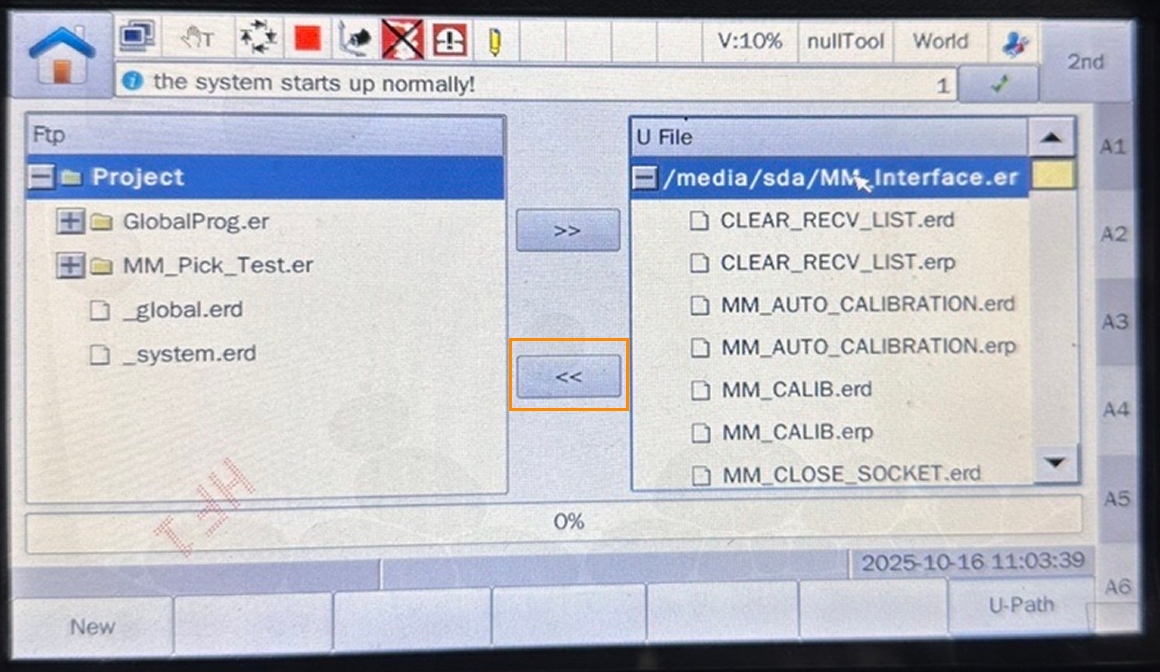
D’abord, dans le volet de gauche FTP, sélectionnez le Projet ; ensuite, dans le volet de droite Fichier U, sélectionnez
MM_Interface.er; enfin, appuyez sur le bouton flèche gauche et attendez que la barre de progression de la copie soit terminée。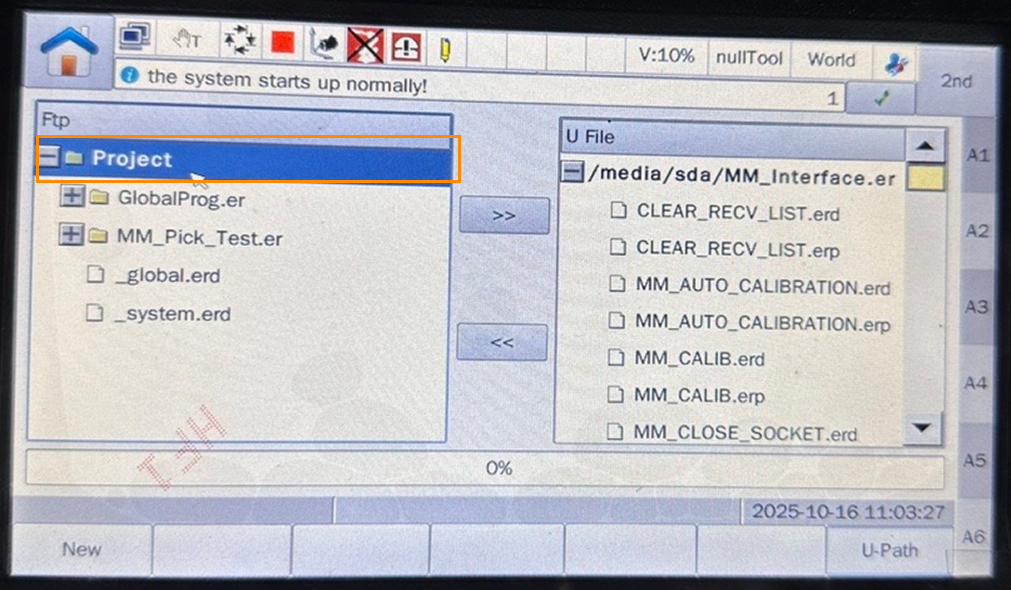
-
Lorsque
MM_Interfaceapparaît dans le panneau Projet, le programme a été chargé avec succès。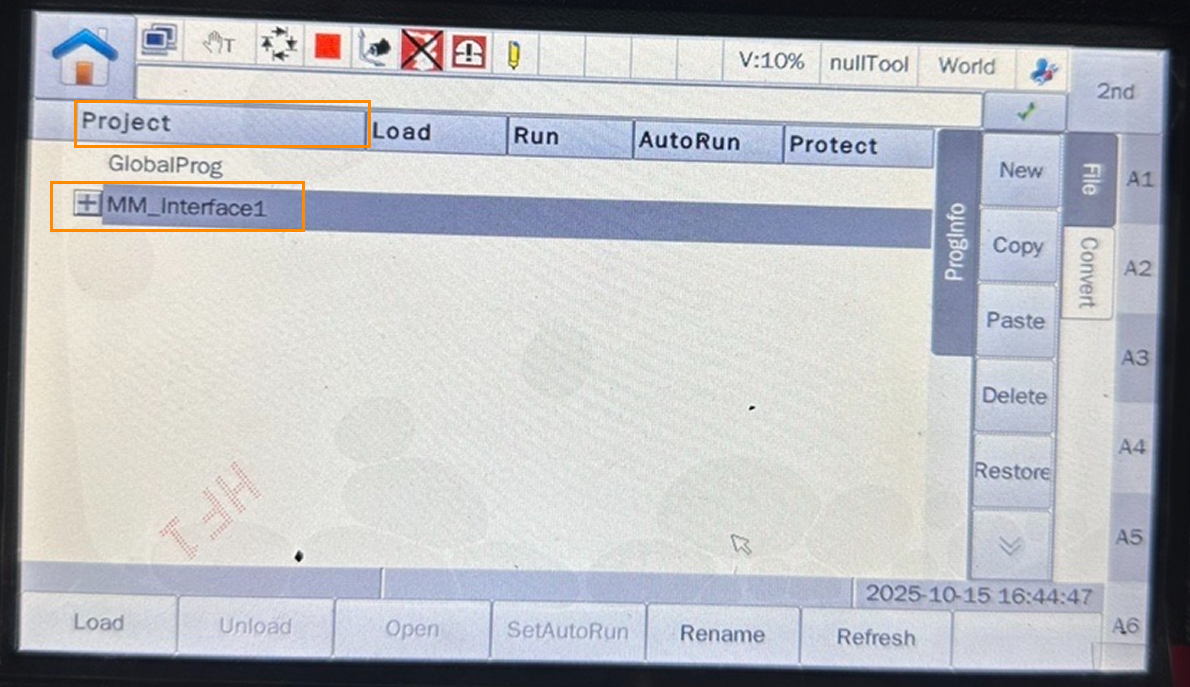
Tester la communication de l’Interface Standard
-
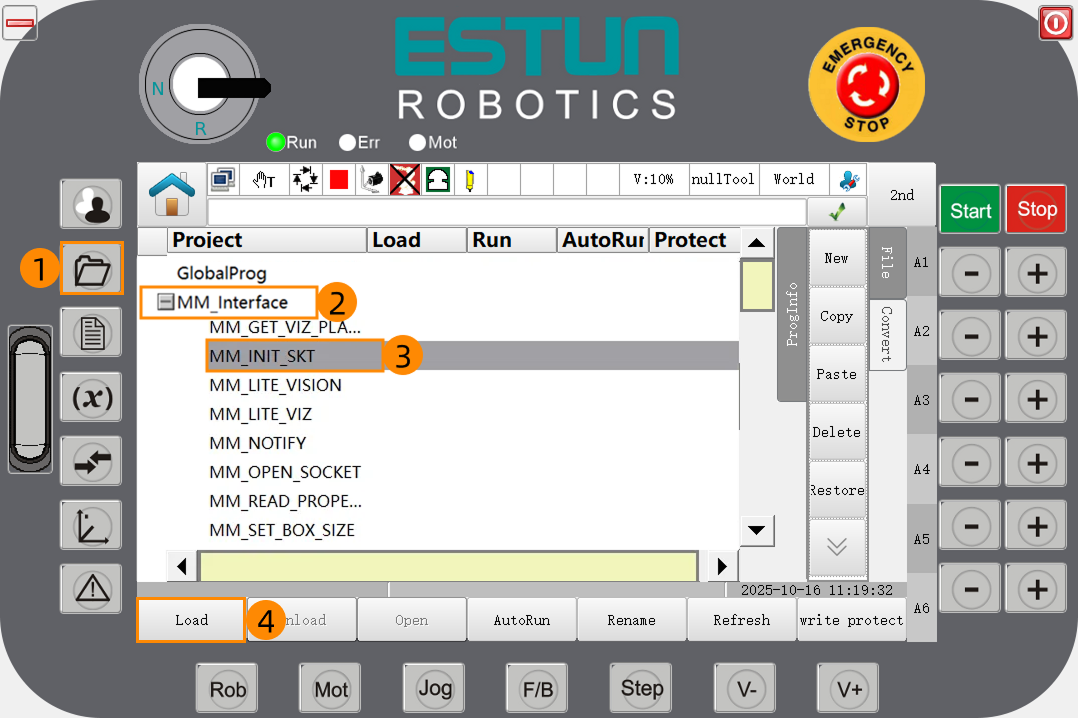
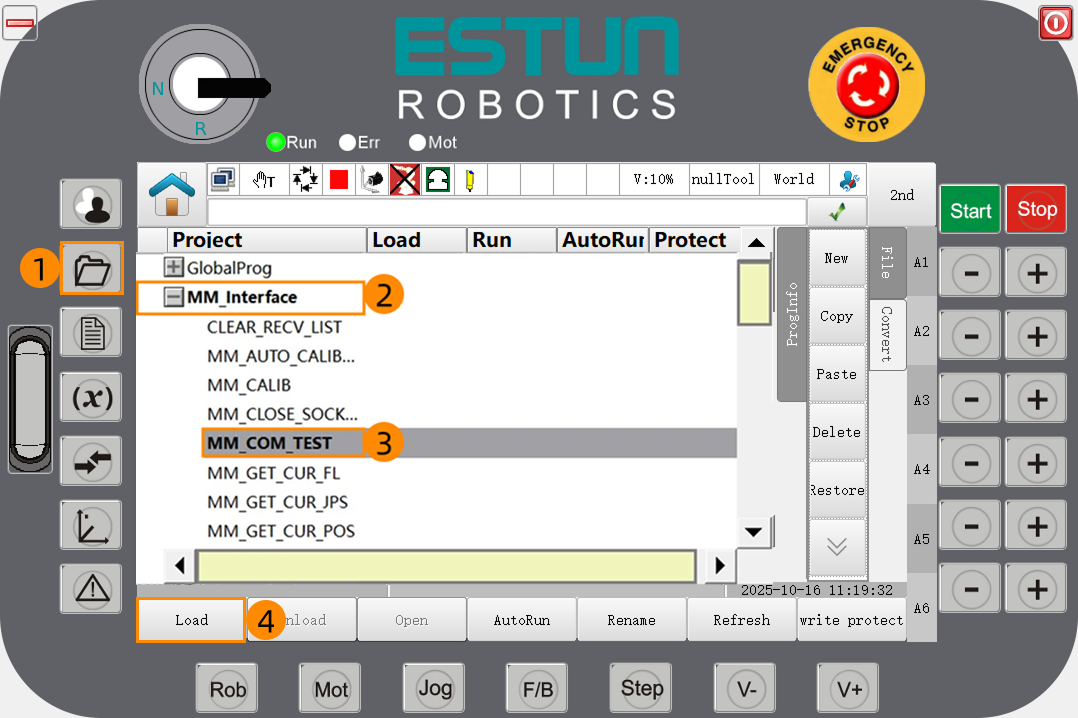
En mode enseignement, appuyez sur le bouton dossier sur le boîtier d’enseignement, développez MM_Interface, sélectionnez MM_INIT_SKT et appuyez sur Charger pour ouvrir le fichier programme。
-
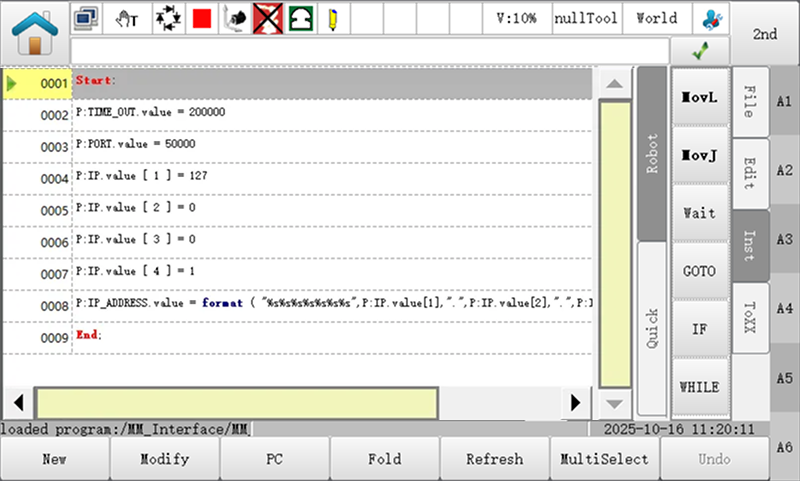
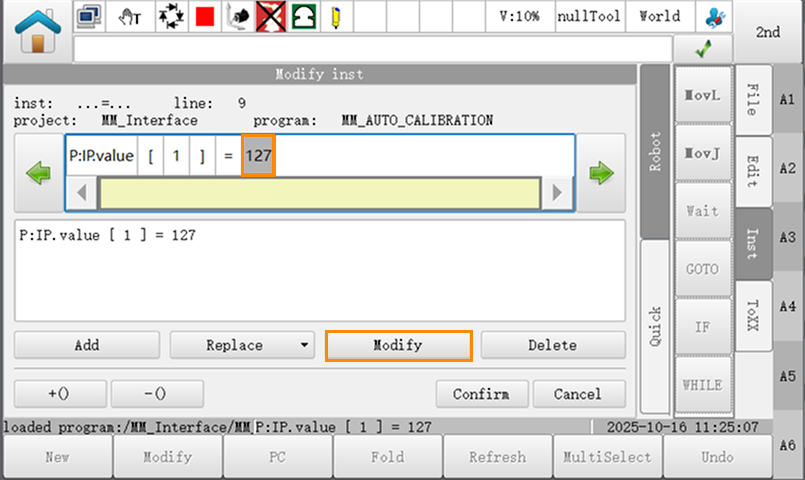
Dans le fichier programme ouvert, vérifiez la valeur de P:PORT.value à la ligne 3 (cette valeur doit correspondre au numéro de port hôte défini dans Mech-Vision). Ensuite, vérifiez les valeurs de P:IP.value[1]~P:IP.value[4] aux lignes 4 à 7 (ces quatre valeurs doivent correspondre aux quatre segments de l’adresse IP de l’IPC)。
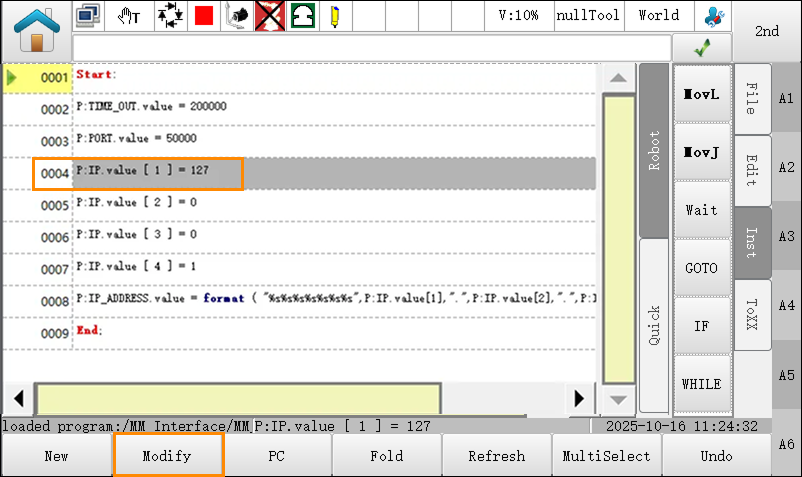
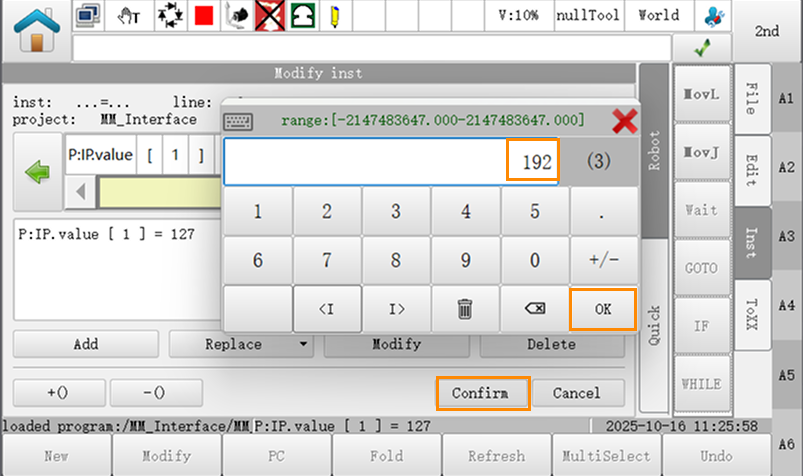
Si vous devez modifier ces valeurs, reportez-vous à l’exemple ci-dessous. L’exemple suivant montre comment changer 127 en 192 à la ligne 4。
-
Sélectionnez la ligne 4 et appuyez sur Modifier。
-
Placez le curseur sur 127 et appuyez sur Modifier。
-
Saisissez 192, puis appuyez successivement sur 。
-
-
Appuyez sur le bouton dossier sur le boîtier d’enseignement et entrez dans la vue Projet. Développez MM_Interface, sélectionnez MM_COM_TEST et appuyez sur Charger pour ouvrir le fichier programme。
-
Tournez le commutateur à clé sur le boîtier d’enseignement en position A pour passer en mode Auto。

-
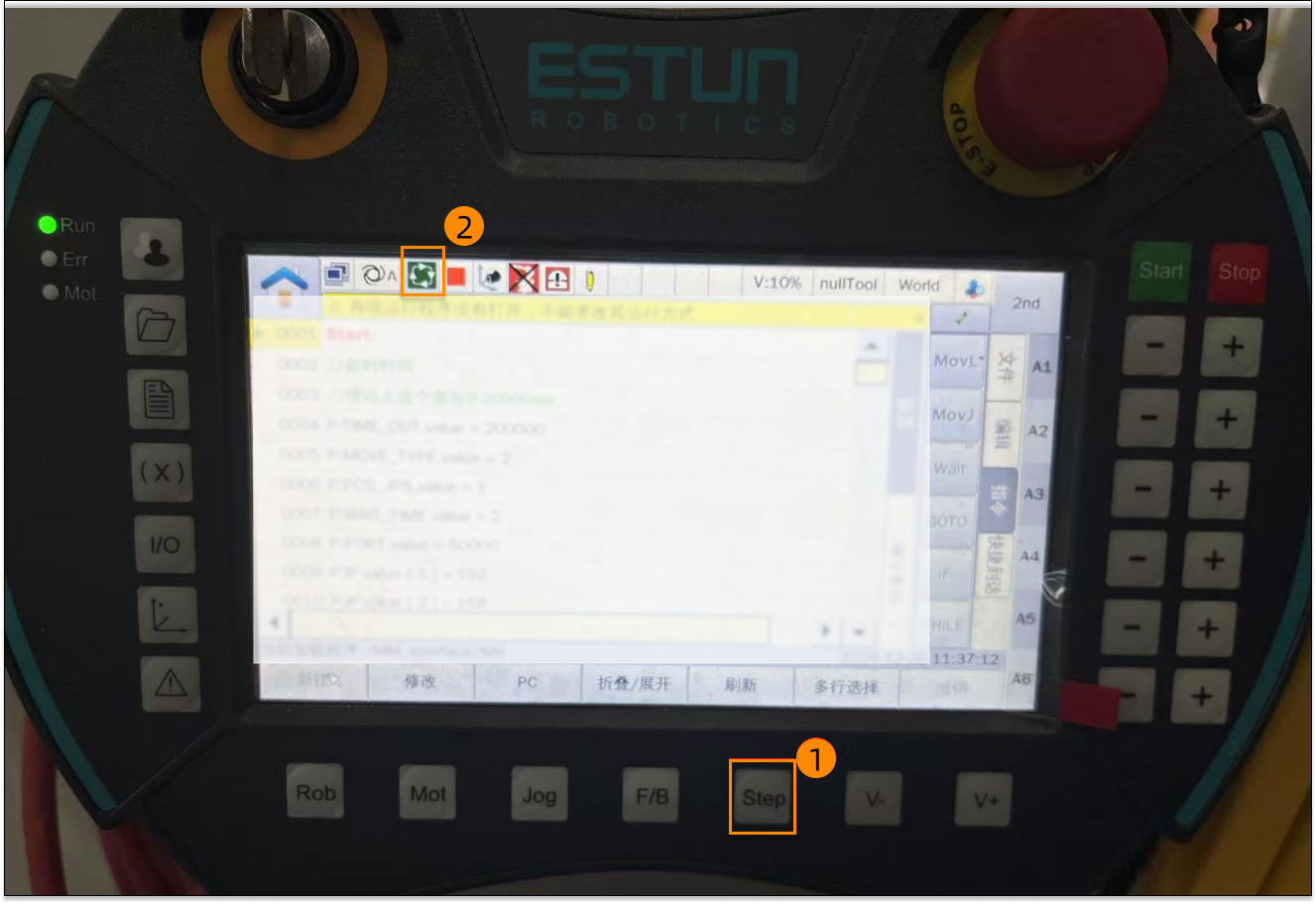
Appuyez sur le bouton Step (position 1 sur la figure) et confirmez que le programme est en mode d’exécution continue (position 2 sur la figure)。
-
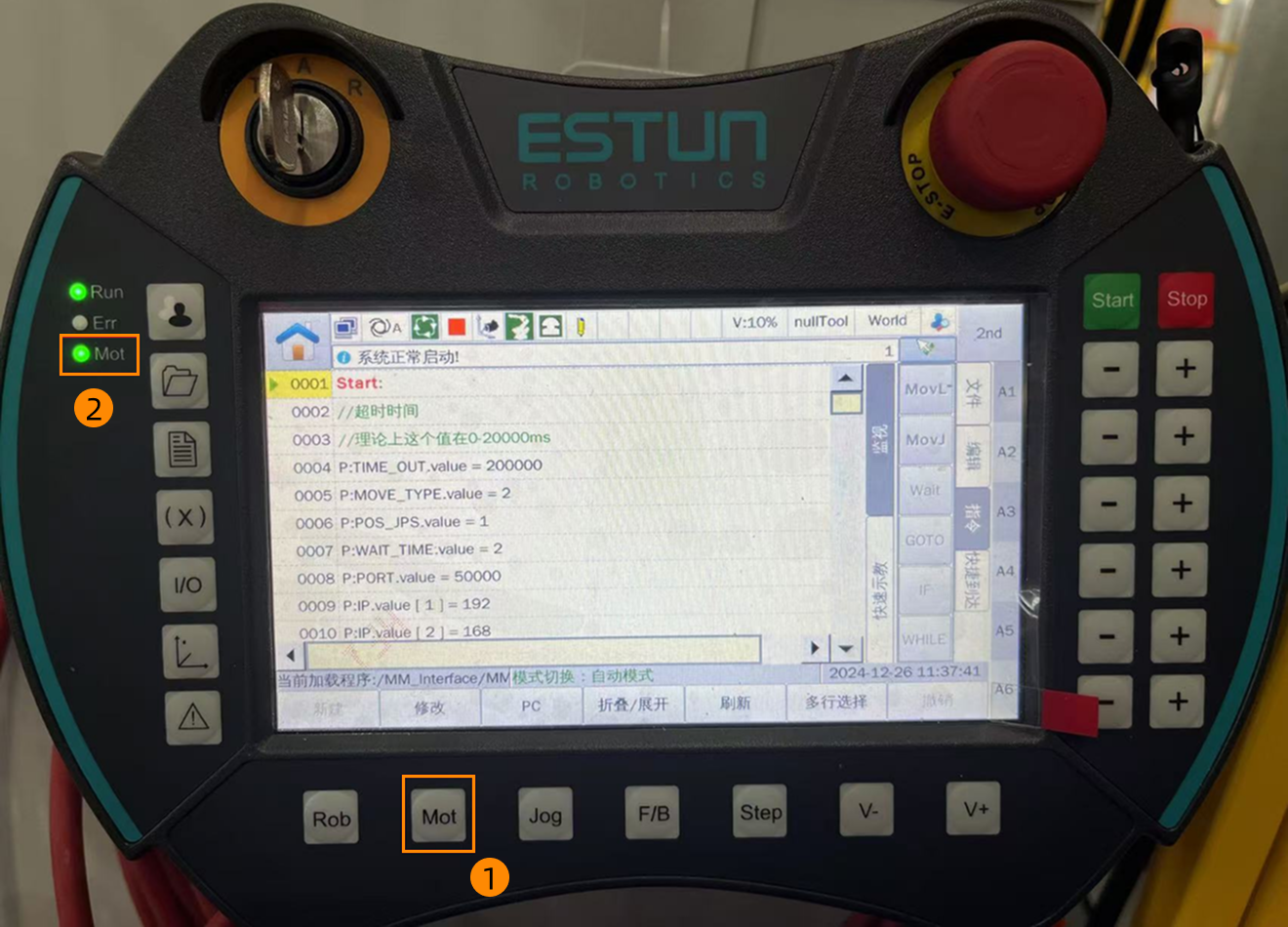
Appuyez sur le bouton Mot (position 1 sur la figure) et confirmez que le témoin d’activation (position 2 sur la figure) est allumé。
-
Appuyez sur le bouton Start pour exécuter le programme. Appuyez sur le bouton Stop pour arrêter le programme。

-
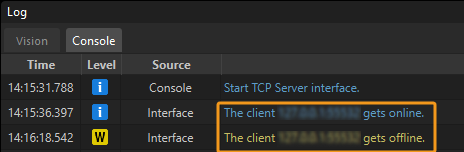
Si la communication entre le robot et le système de vision est configurée, un journal sera enregistré dans l’onglet Console du panneau Journal de Mech-Vision。