Exemple 6: MM_S6_Vis_Timer
Présentation du programme
Description |
L’API calcule le temps de cycle de vision, qui correspond au temps nécessaire pour déclencher l’exécution du projet Mech-Vision et obtenir le résultat de vision. |
Chemin du fichier |
Les fichiers d’exemple sont stockés dans |
Projet |
Projet Mech-Vision |
Prérequis |
|
| Ce programme d’exemple est fourni à titre de référence uniquement. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette section décrit le programme d’exemple MM_S6_Vis_Timer.
| La seule différence entre le programme d’exemple MM_S6_Vis_Timer et le programme d’exemple MM_S1_Vis_Basic est que MM_S6_Vis_Timer peut calculer le temps de cycle de vision (Réseau 7). Par conséquent, seule la fonction de calcul du temps de cycle de vision est décrite dans la partie suivante. Pour obtenir des informations sur les parties de MM_S6_Vis_Timer qui sont cohérentes avec celles de MM_S1_Vis_Basic, voir Programme d’exemple 1: MM_S1_Vis_Basic. |
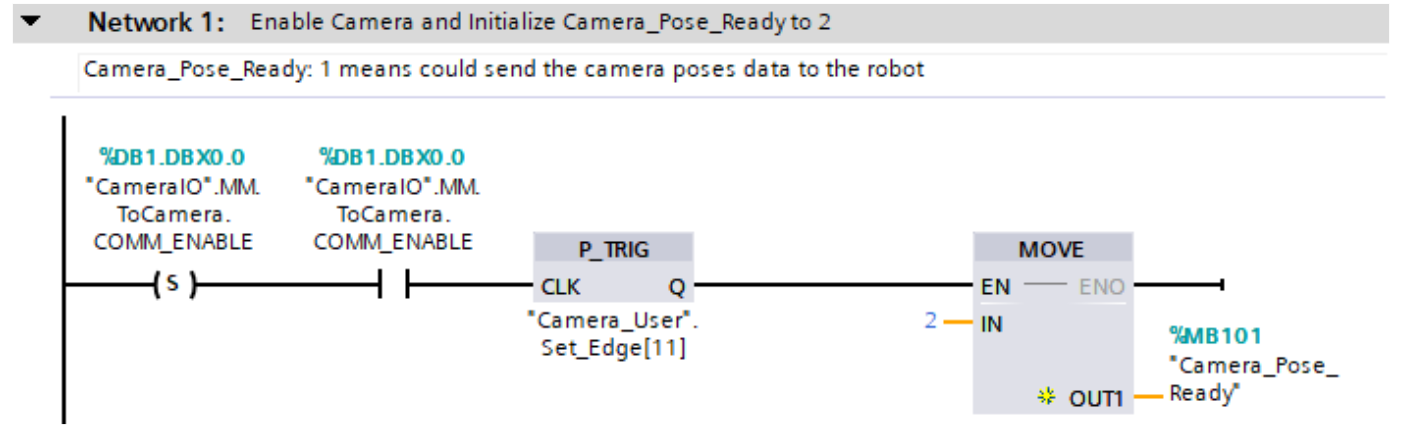
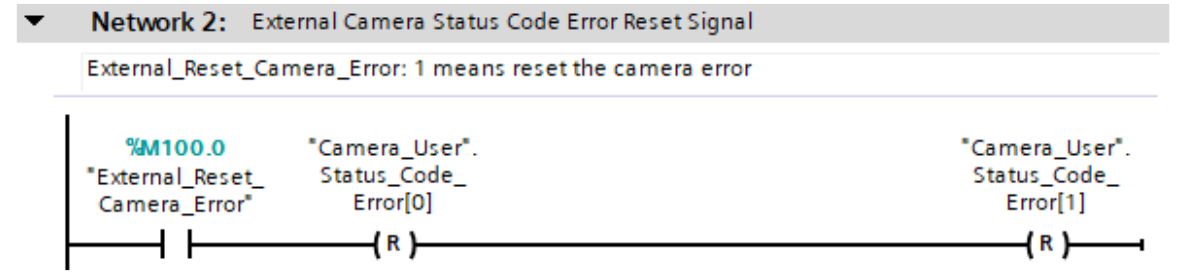
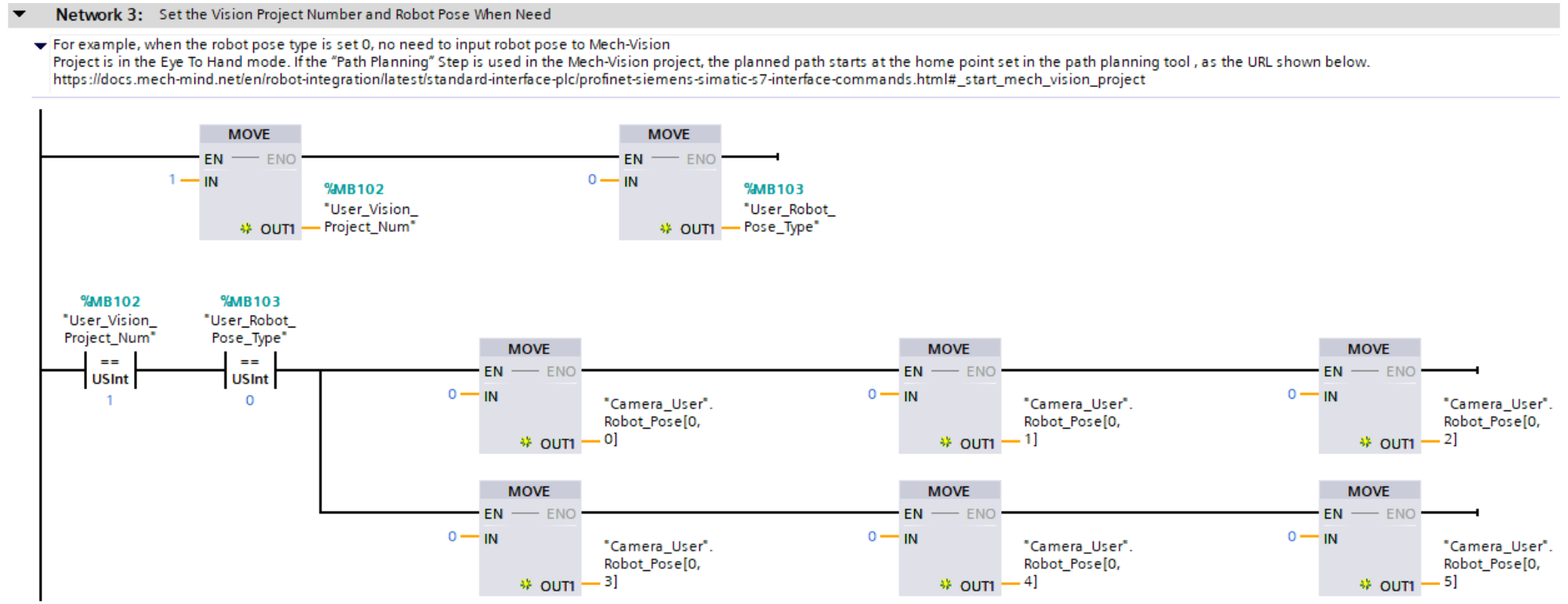
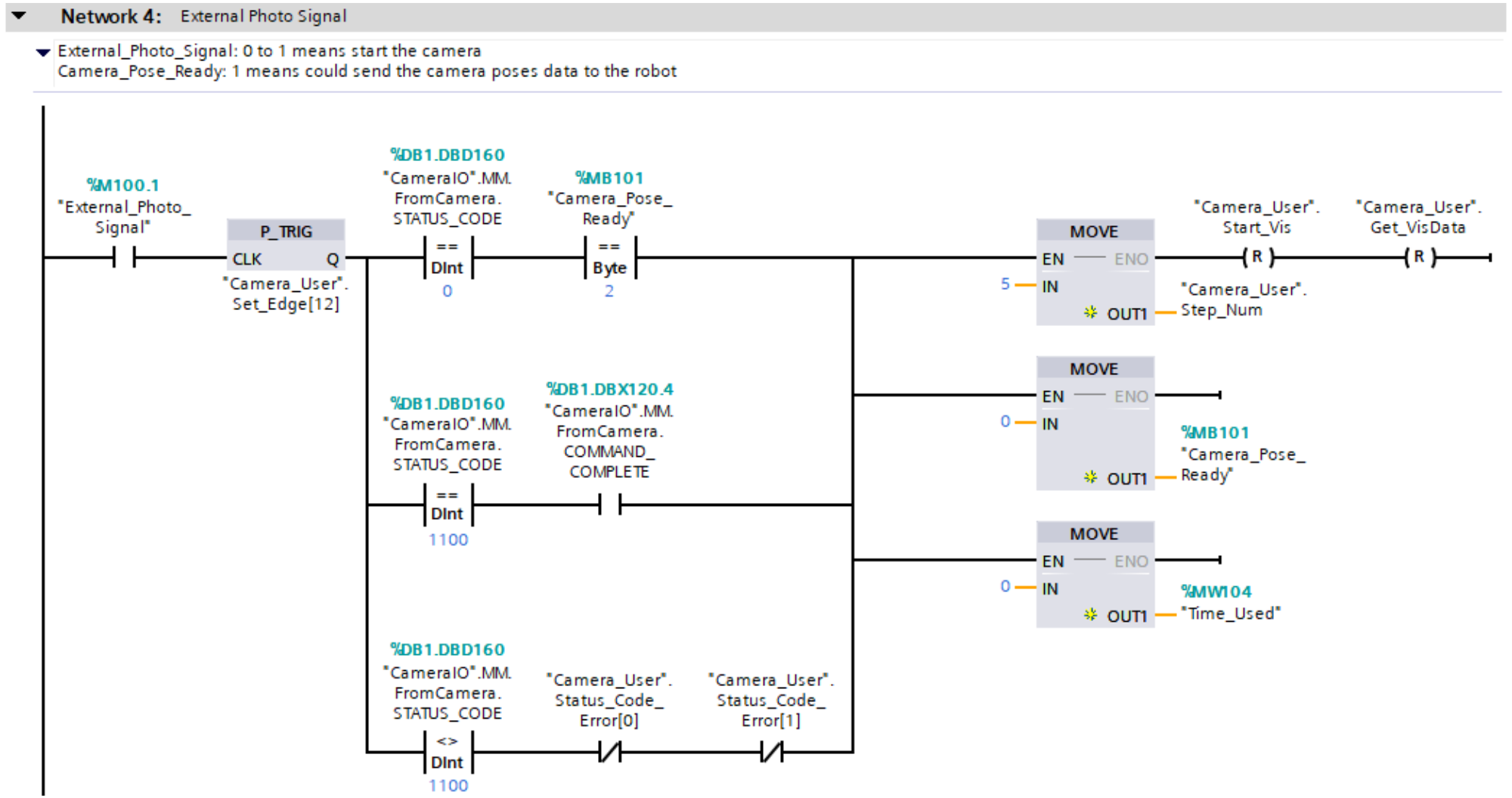
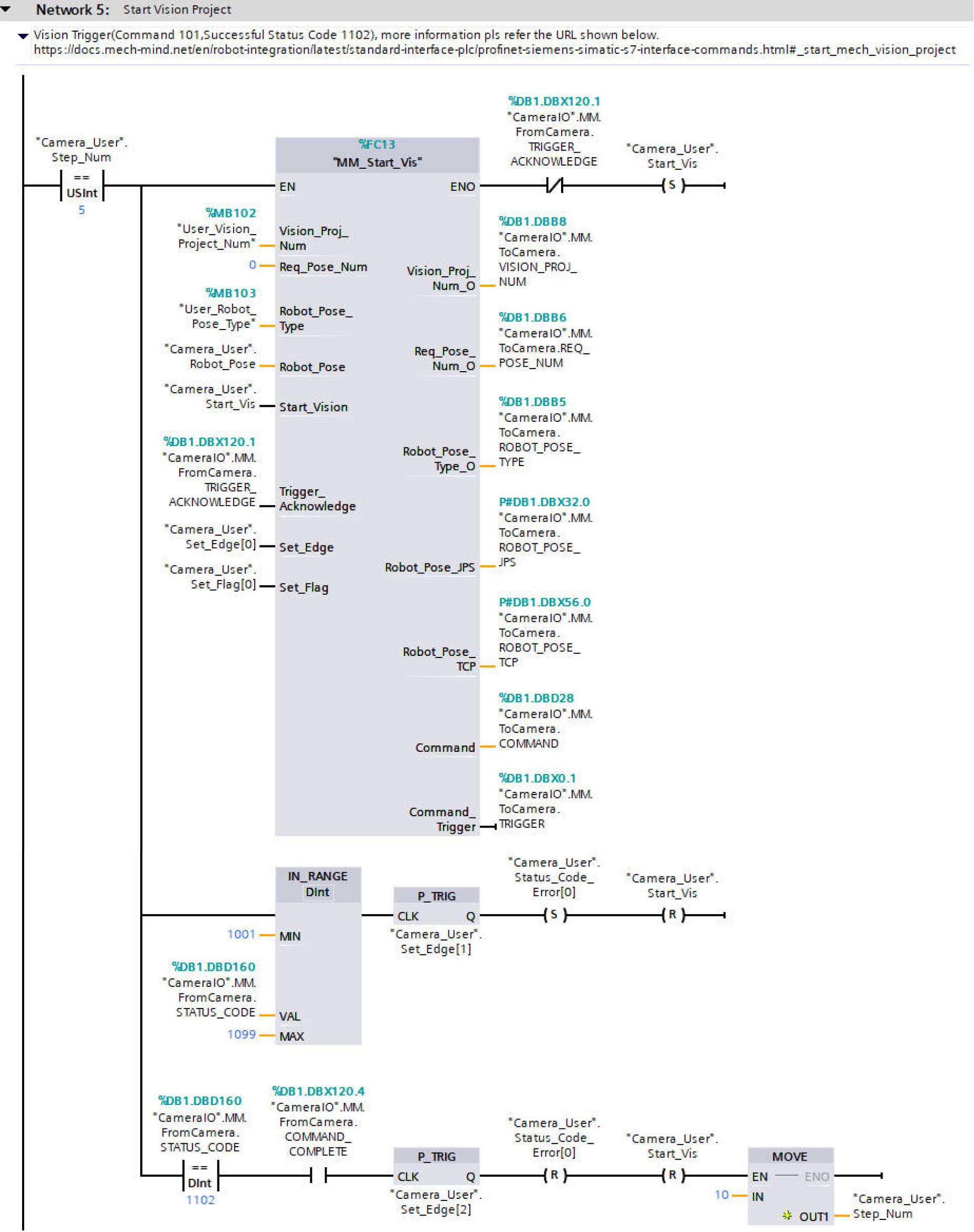
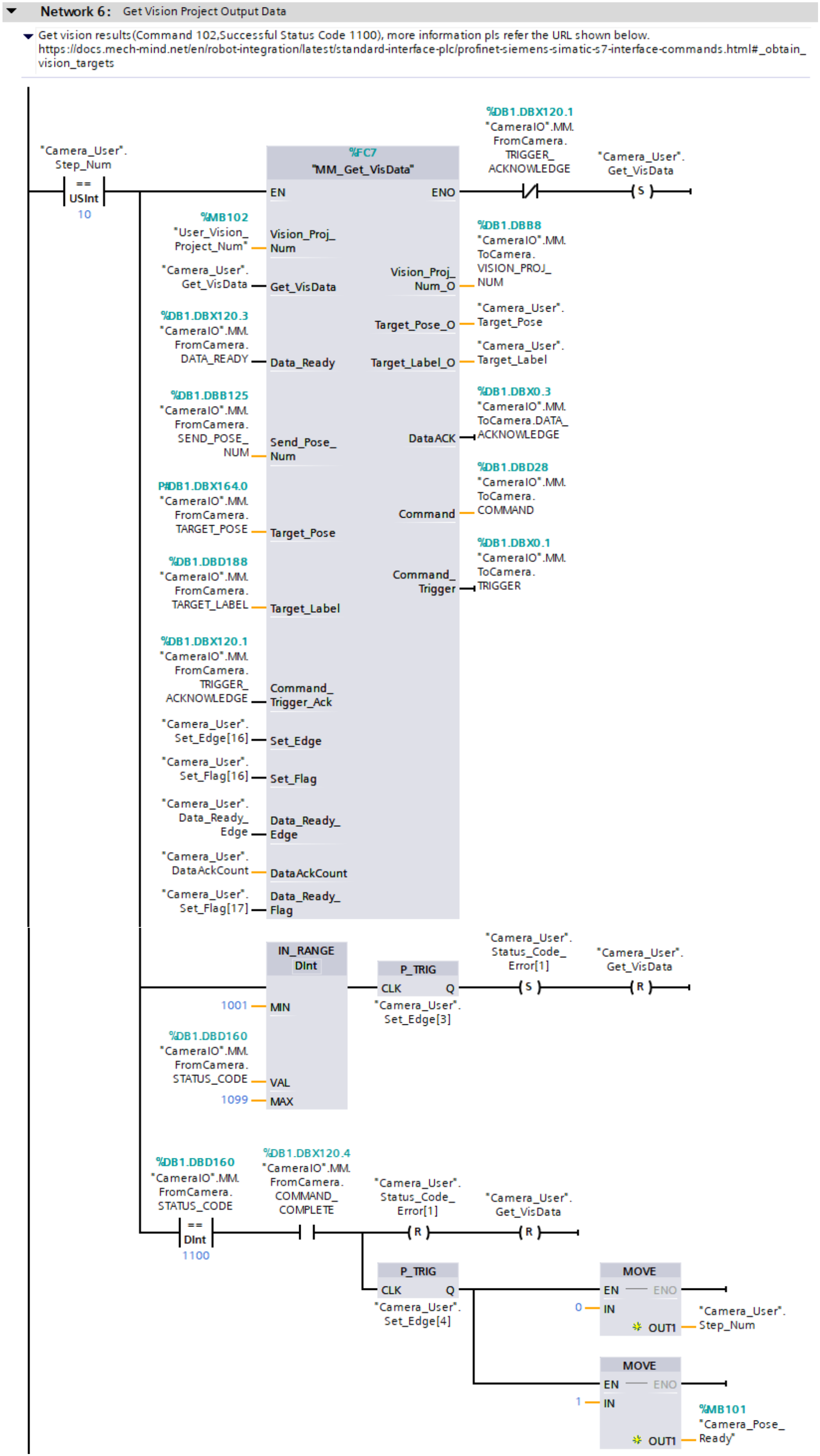
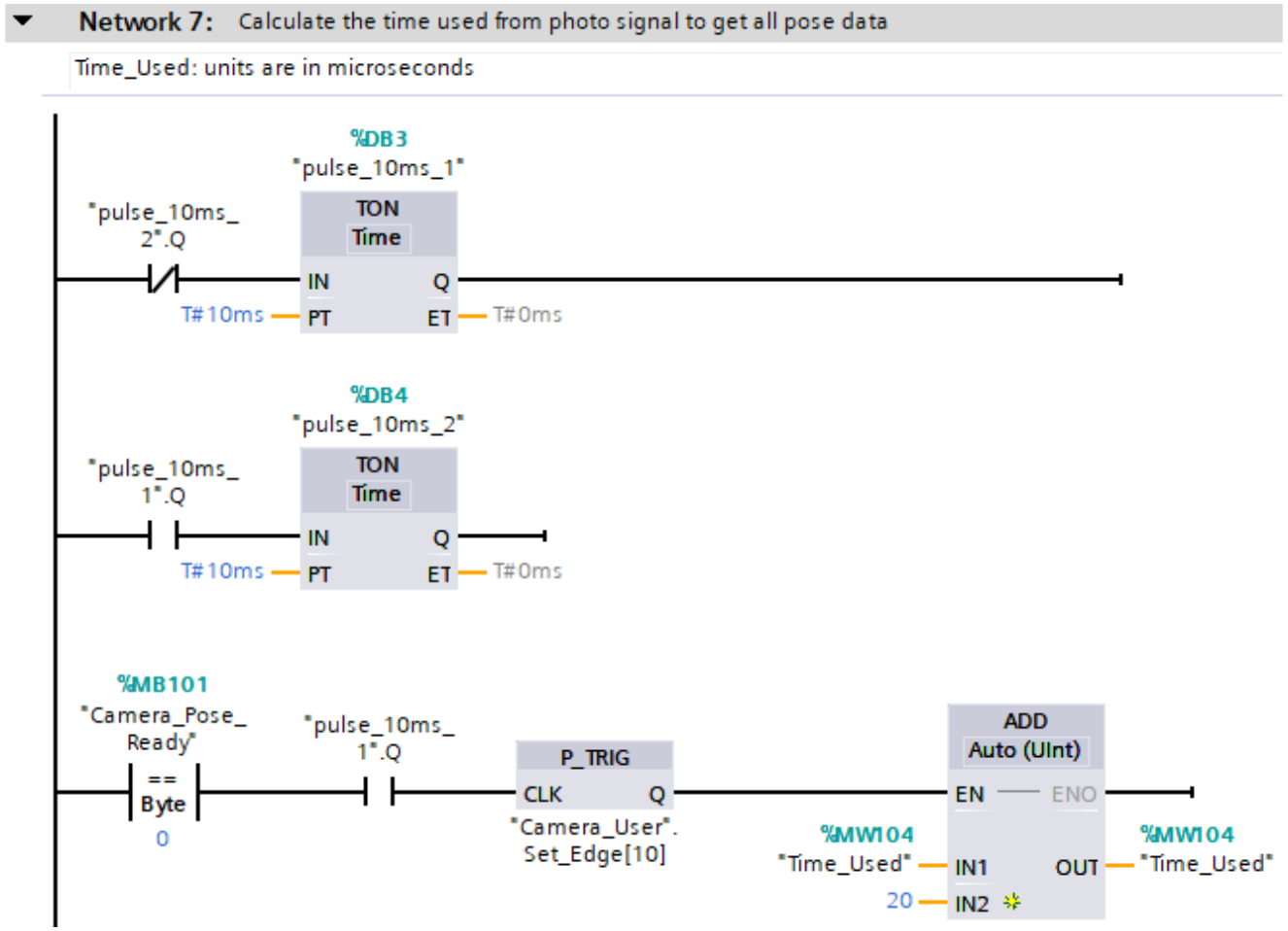
Dans le programme d’exemple ci-dessus, la fonction de calcul du temps de cycle de vision est illustrée dans la figure ci-dessous.
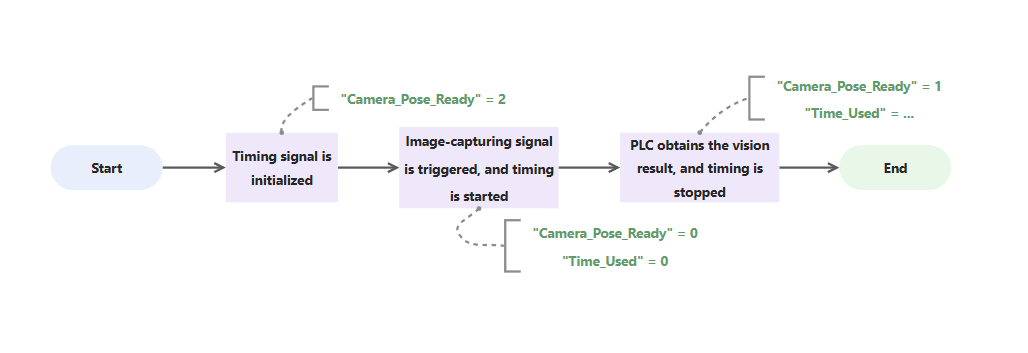
Le tableau ci-dessous illustre le processus de calcul du temps de cycle de vision.
|
Pour les commandes courantes fournies avec les API de la série Siemens S7, voir Commandes courantes. |
| Fonction | Description |
|---|---|
Calcul du temps de cycle de vision |
Le Réseau 7 indique que des temporisateurs sont utilisés pour calculer le temps de cycle de vision. Les détails sont décrits ci-dessous.
|