Configurer la communication de l’interface standard avec KUKA
Ce guide explique comment charger les fichiers du programme d’interface standard sur un robot KUKA, et comment configurer la communication de l’interface standard entre le système de vision Mech-Mind et le robot.
| Dans cette section, vous chargerez le programme d’interface standard et les fichiers de configuration dans le système du robot afin d’établir la communication de l’interface standard entre le système de vision et le robot. |
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Nombre d’axes du robot : 6
-
Modèle de contrôleur : KR C4 ou KR C5
-
Version du logiciel système du contrôleur : KSS 8.2, 8.3, 8.5, 8.6 ou 8.7
Cliquez ici pour les instructions
-
Cliquez sur
 , et sélectionnez .
, et sélectionnez .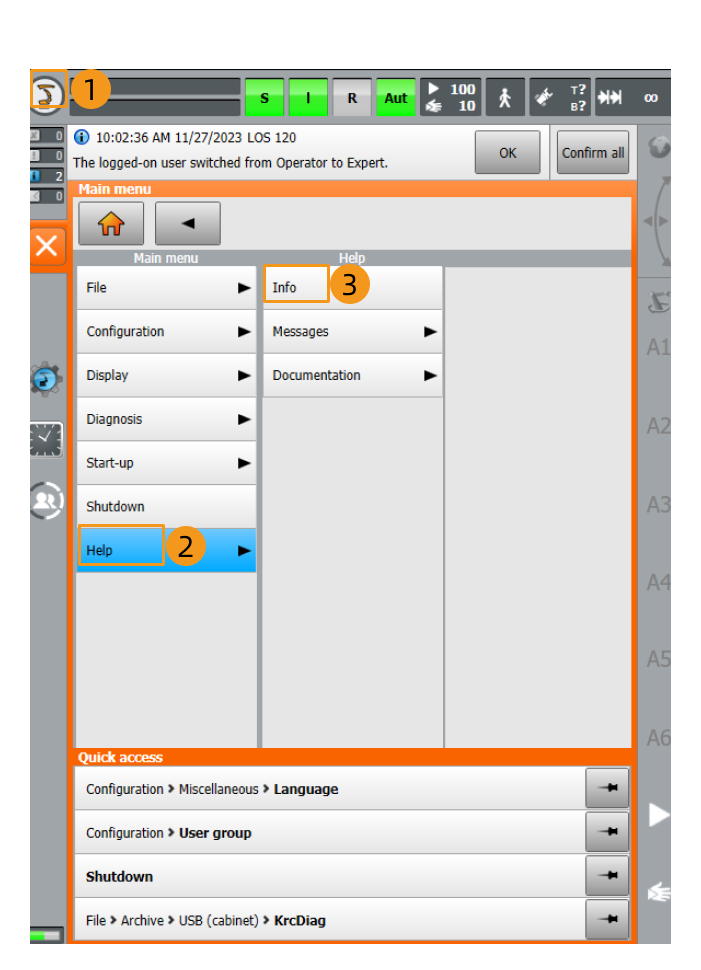
-
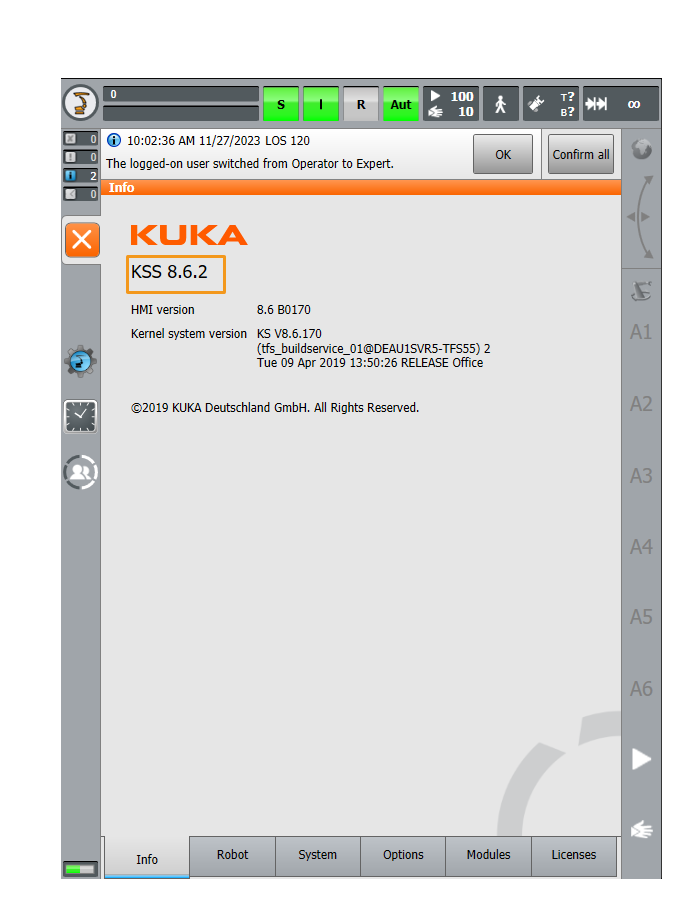
Vérifiez la version du logiciel système du contrôleur dans l’interface Informations.
-
-
Paquet logiciel complémentaire : Ethernet KRL (V2.2.8, 3.0.3, 3.1.2.29, ou 3.2.2.16).
La correspondance entre les versions KSS et Ethernet KRL est la suivante :
Version KSS Version Ethernet KRL 8.2 or 8.3
2.2.8
8.5
3.0.3
8.6
3.1.2.29
8.7
3.2.2.16
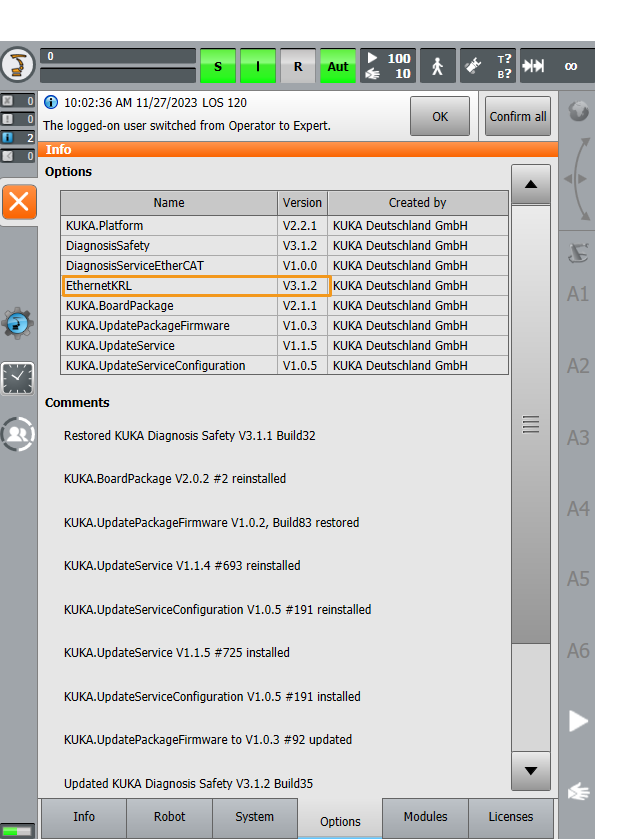
Cliquez ici pour les instructions
Cliquez sur Options dans l’interface Informations pour afficher la version d’Ethernet KRL.
|
Toutes les actions sur le pupitre de programmation décrites dans ce document sont réalisées sous KSS 8.6. Les étapes spécifiques et les sélections de menus peuvent légèrement varier selon les versions du pupitre. |
Configurer la connexion réseau
Connecter le matériel
-
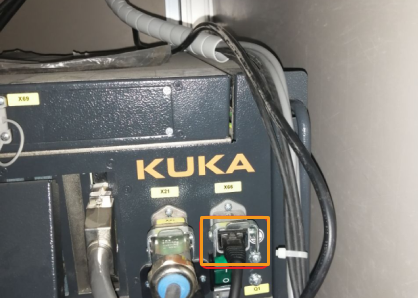
KR C4 Compact : Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port X66 du contrôleur du robot.
-
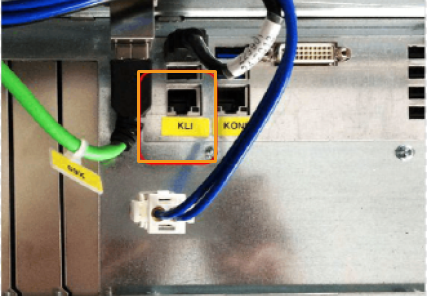
Autres modèles KR C4 : Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port KLI du contrôleur du robot.
-
Modèles KR C5 : Branchez une extrémité du câble Ethernet sur le port réseau de l’IPC et l’autre extrémité sur le port XF5 du contrôleur du robot.

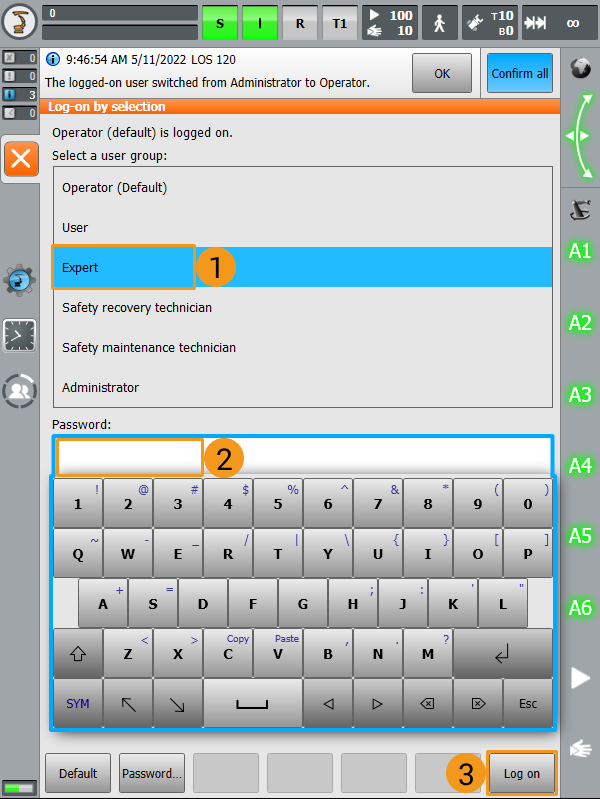
Passer en mode Expert
-
Cliquez sur
, et sélectionnez pour entrer dans l’interface de connexion.
-
Sélectionnez Expert, saisissez le mot de passe (le mot de passe par défaut est kuka), puis cliquez sur Se connecter.
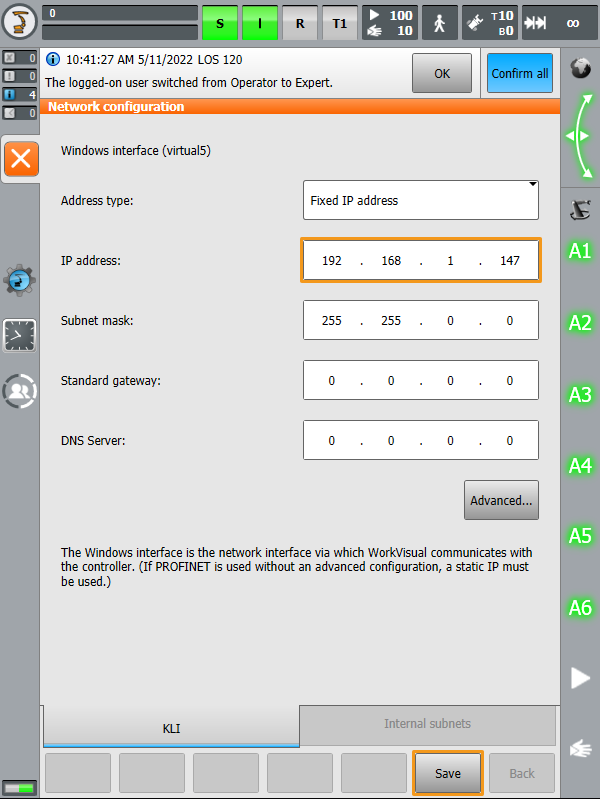
Définir l’adresse IP
-
Cliquez sur
, et sélectionnez .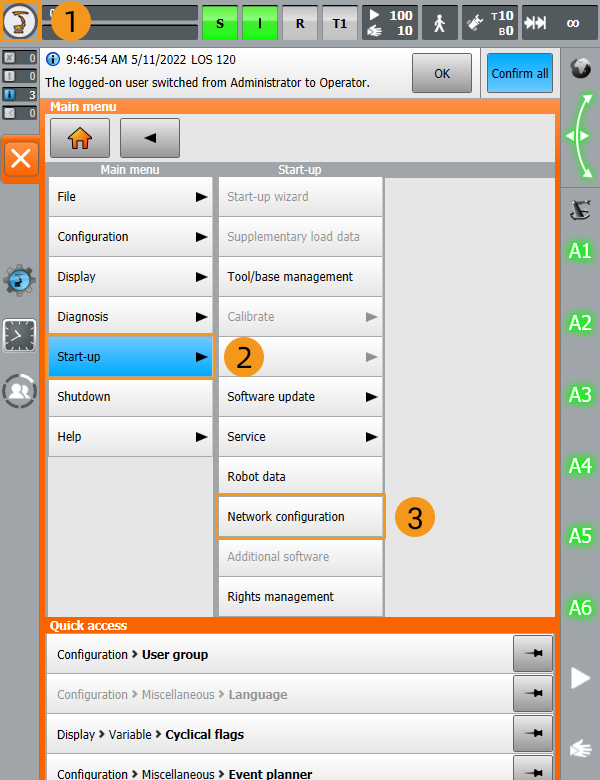
-
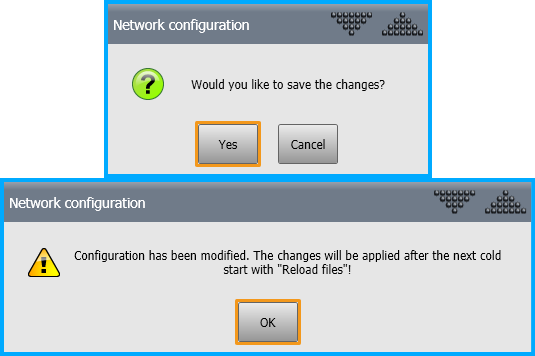
Saisissez une adresse IP sur le même sous-réseau que celle de l’IPC. Puis cliquez sur Enregistrer. Cliquez respectivement sur Oui et OK dans les deux fenêtres contextuelles suivantes.
-
Dans l’IPC, définissez l’adresse IP de l’IPC.
Afin de permettre la communication entre l’IPC et le contrôleur du robot, les adresses IP de l’IPC et du contrôleur doivent se trouver sur le même sous-réseau. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 se trouvent sur le même sous-réseau.
Sauvegarder le programme du robot
| Assurez-vous d’avoir basculé en mode Expert. Sinon, la clé USB n’apparaîtra pas sur le pupitre de programmation. |
-
Branchez la clé USB contenant le fichier de sauvegarde sur le contrôleur et vérifiez qu’elle apparaît sur le pupitre de programmation.
-
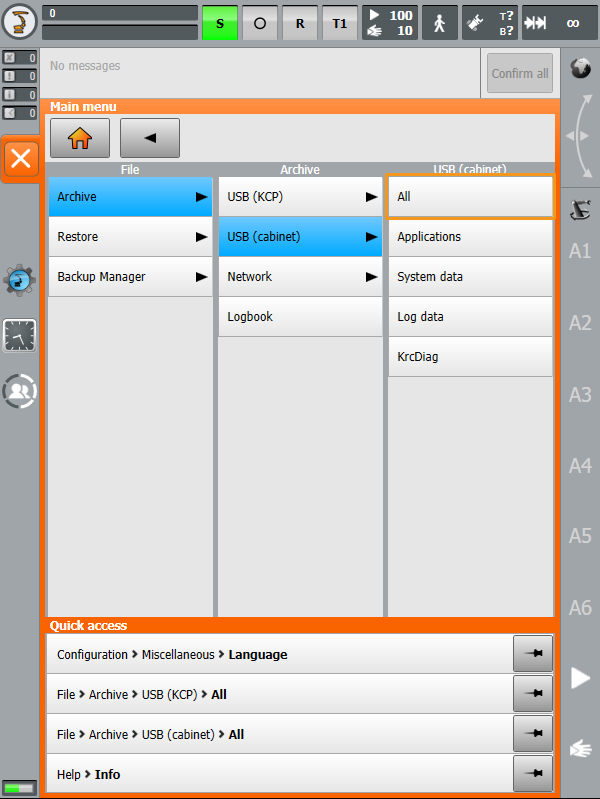
Cliquez sur
, sélectionnez , puis cliquez sur Oui dans la fenêtre contextuelle pour démarrer la sauvegarde.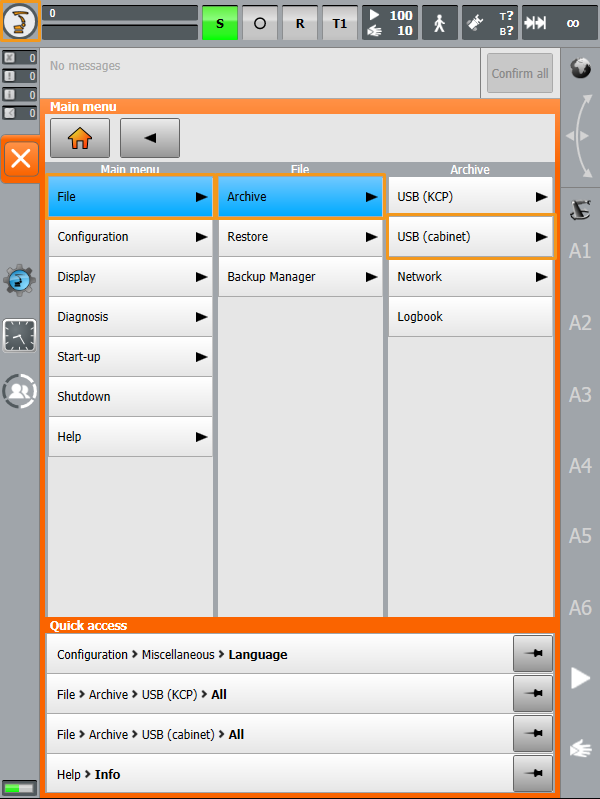
-
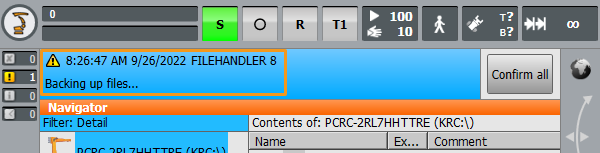
Si les informations suivantes s’affichent sur le pupitre de programmation, la sauvegarde est terminée. Un fichier ZIP est enregistré sur la clé USB. Débranchez la clé USB.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
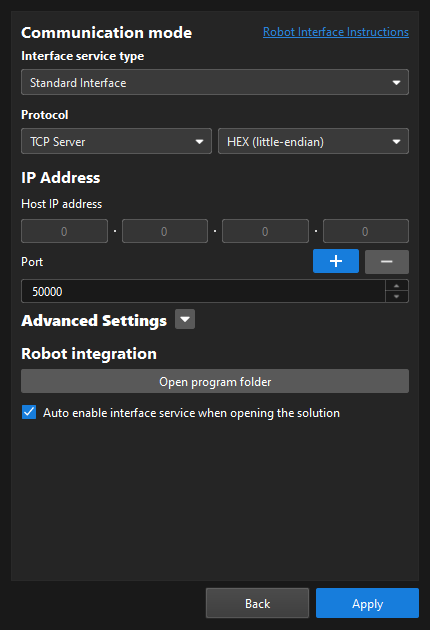
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et HEX (little-endian) pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Préparer les fichiers du programme
-
Branchez la clé USB sur le port USB de l’IPC.
-
Dans l’IPC, dans le dossier de programme ouvert (dossier
KUKA), revenez au répertoire supérieurRobot_Interface, copiez l’intégralité du dossierKUKAsur la clé USB, puis débranchez la clé USB.Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/KUKAdans le répertoire d’installation de Mech-Vision et Mech-Viz.Le dossier
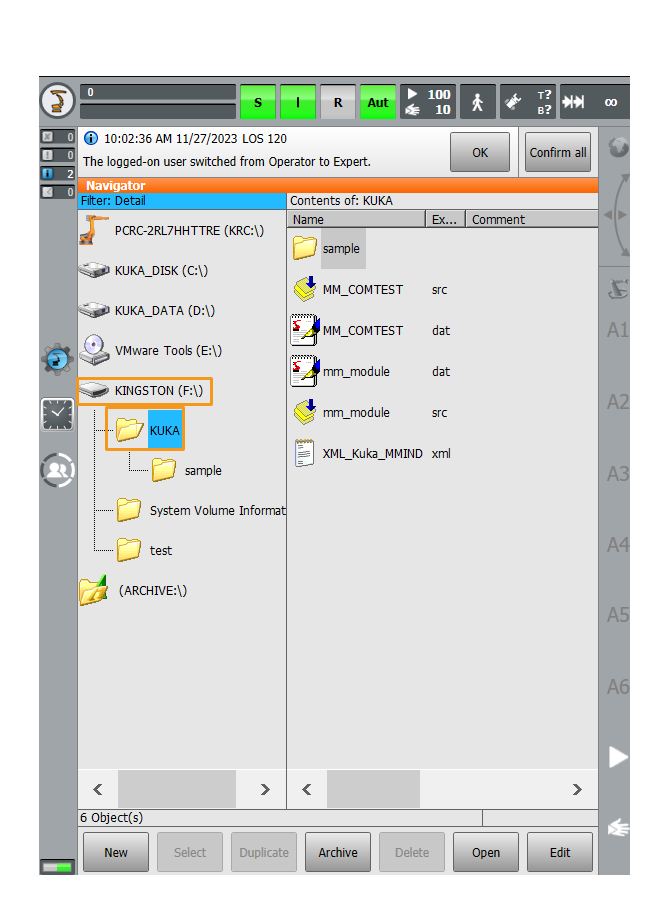
KUKAcontient les fichiers suivants :-
mm_module.src (fichier de programme)
-
mm_module.dat (fichier de programme)
-
XML_Kuka_MMIND.xml (fichier de configuration réseau)
-
MM_COMTEST.src (fichier de programme pour tester la communication)
-
MM_COMTEST.dat (fichier de programme pour tester la communication)
-
sample (dossier pour stocker des exemples de fichiers de programme)
-
Charger les fichiers du programme sur le robot
| Assurez-vous d’avoir basculé en mode Expert. Sinon, la clé USB n’apparaîtra pas sur le pupitre de programmation. |
-
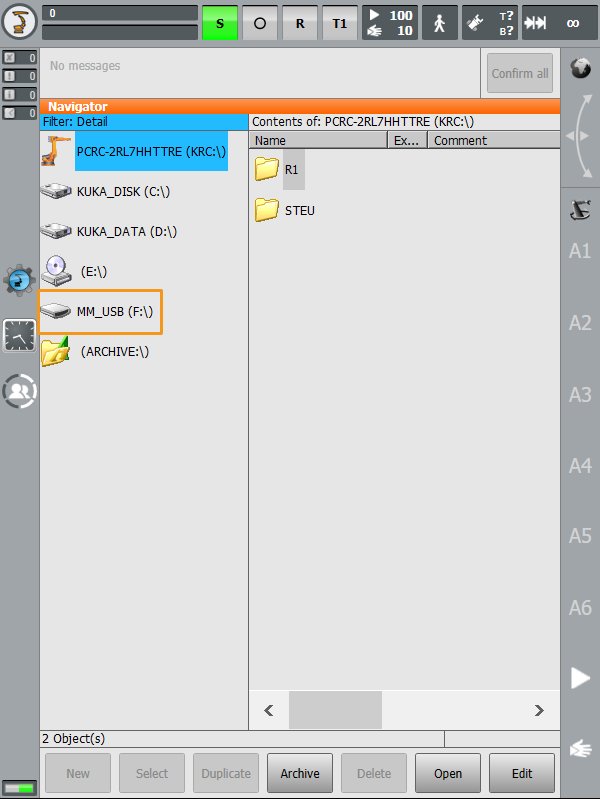
Branchez la clé USB sur le contrôleur, sélectionnez la clé USB dans le panneau de gauche, puis localisez le dossier susmentionné.
-
Copiez mm_module.src, mm_module.dat, MM_COMTEST.src et MM_COMTEST.dat dans le répertoire
KRC:\R1\mm. Si le dossier mm n’existe pas, créez-le.-
Créez un dossier mm.
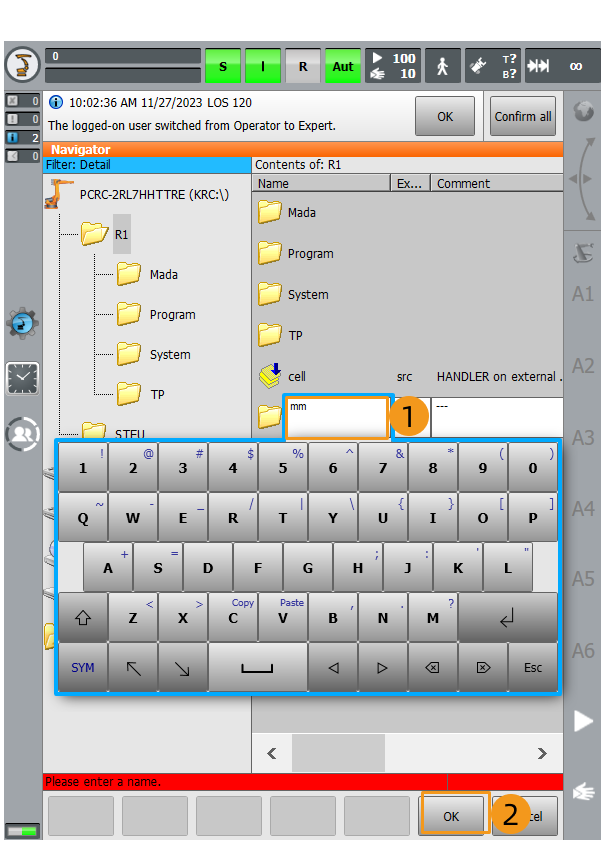
Cliquez sur KRC:\, cliquez sur le dossier R1, puis cliquez sur Nouveau.
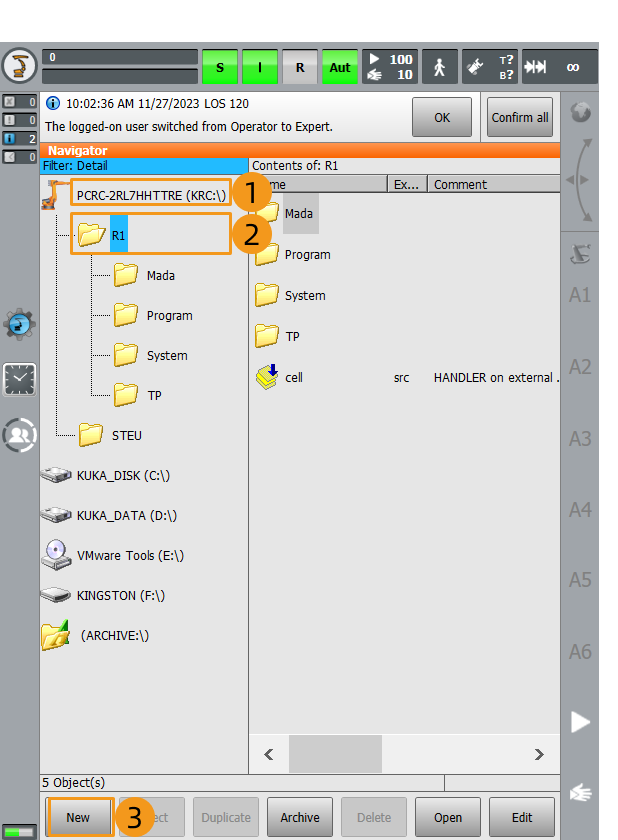
Saisissez mm comme nom de dossier dans la fenêtre contextuelle et cliquez sur OK pour créer le dossier mm.
-
Sélectionnez mm_module.src, mm_module.dat, MM_COMTEST.src et MM_COMTEST.dat dans le dossier KUKA de la clé USB, cliquez sur Modifier, puis cliquez sur Copier.
Appuyez longuement et faites glisser pour sélectionner plusieurs fichiers adjacents. 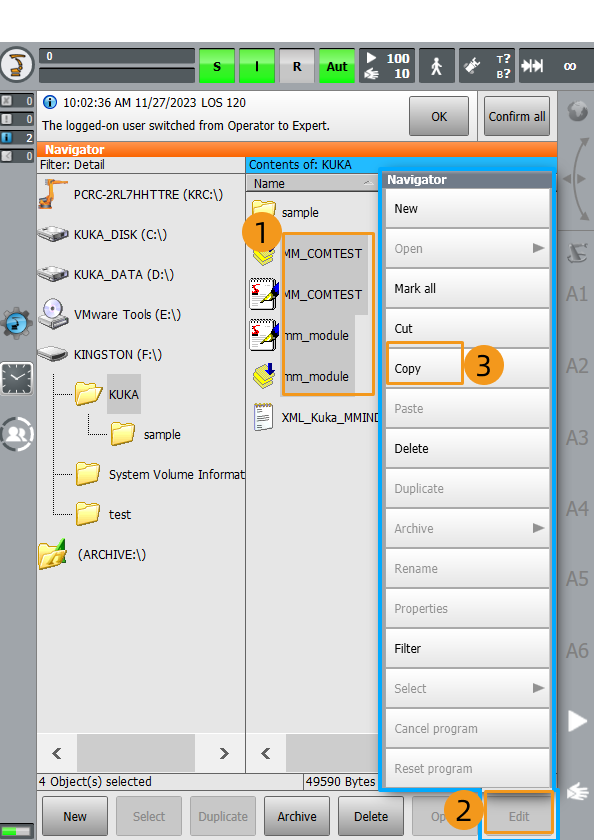
-
Sélectionnez le dossier mm dans le répertoire
KRC:\R1et cliquez sur Ouvrir.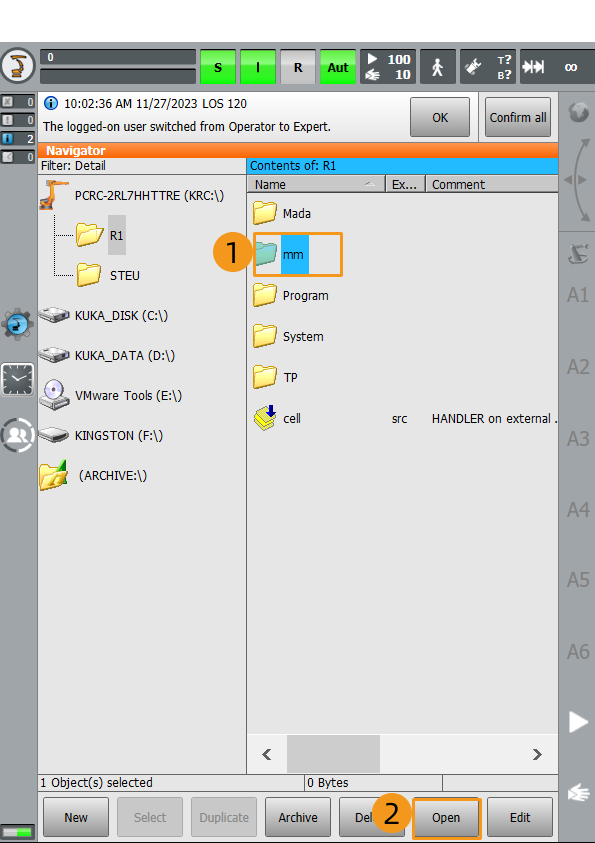
-
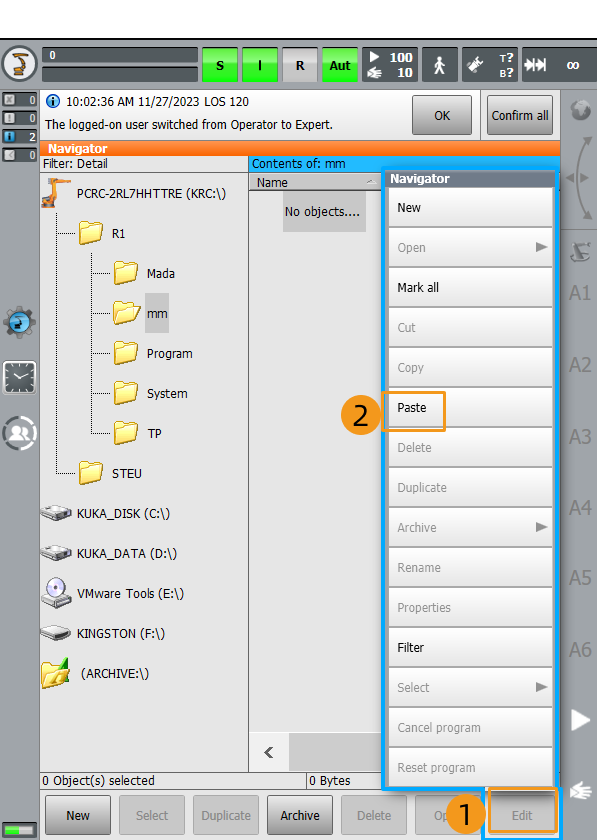
Sélectionnez pour coller les fichiers sélectionnés.
-
-
Suivez les étapes précédentes pour copier et coller XML_Kuka_MMIND.xml vers
C:\KRC\ROBOTER\Config\User\Common\EthernetKRL. -
Sélectionnez XML_Kuka_MMIND.xml dans
C:\KRC\ROBOTER\Config\User\Common\EthernetKRLet cliquez sur Ouvrir.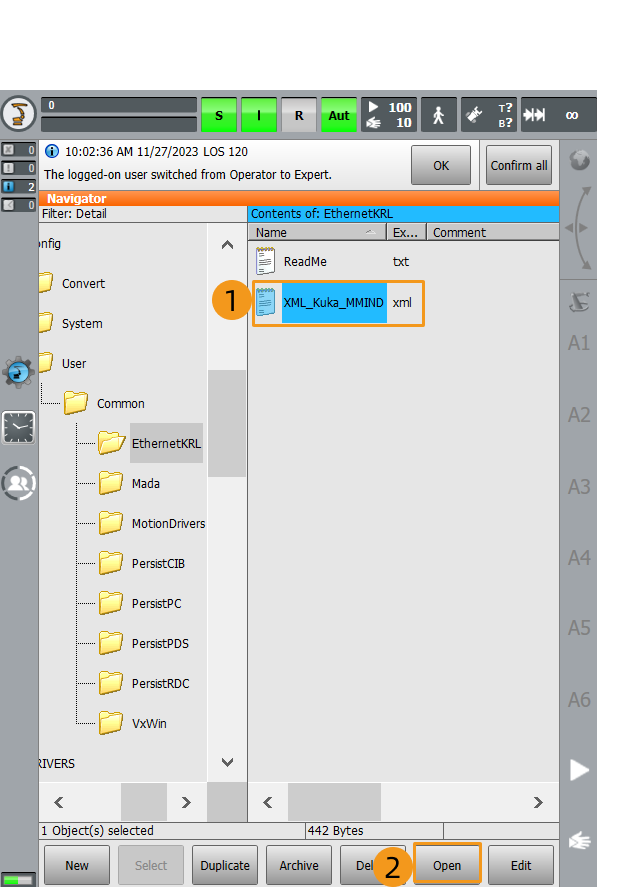
-
Sélectionnez la ligne 4 et cliquez sur
 sur la gauche pour faire apparaître le clavier. Modifiez l’adresse IP de cette ligne pour celle de l’IPC, puis cliquez de nouveau sur pour masquer le clavier. Le numéro de port de la ligne 5 doit être identique au numéro de port du PC hôte spécifié dans Mech-Vision. Pour changer le numéro de port, répétez les étapes précédentes.
sur la gauche pour faire apparaître le clavier. Modifiez l’adresse IP de cette ligne pour celle de l’IPC, puis cliquez de nouveau sur pour masquer le clavier. Le numéro de port de la ligne 5 doit être identique au numéro de port du PC hôte spécifié dans Mech-Vision. Pour changer le numéro de port, répétez les étapes précédentes.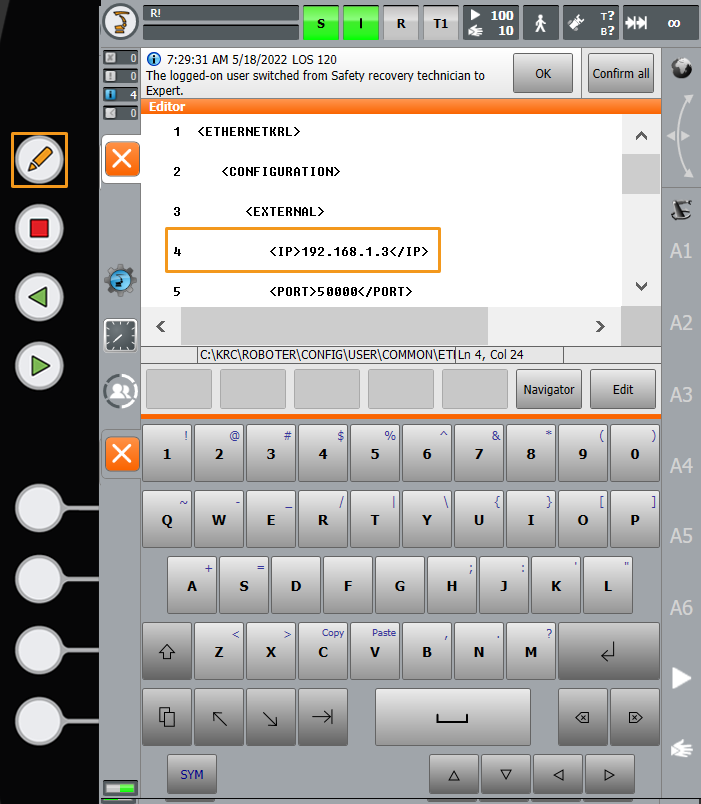
-
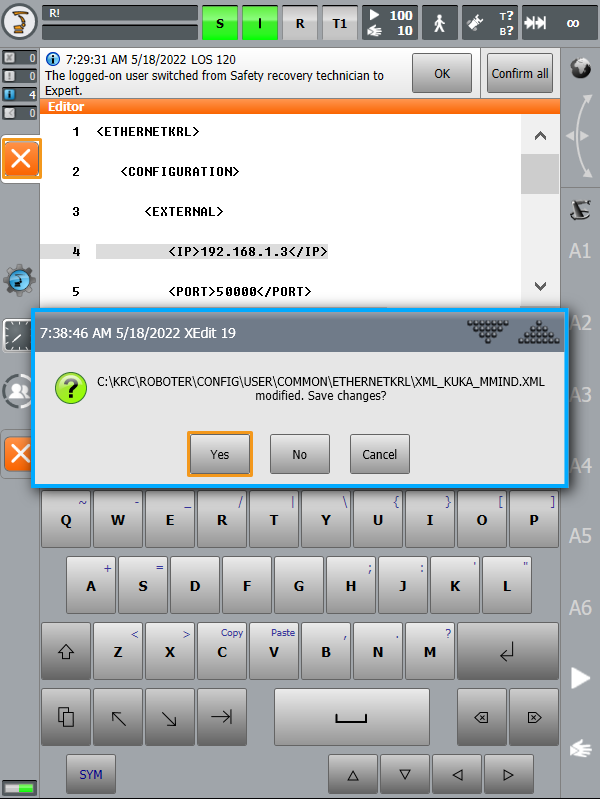
Après avoir terminé la modification, cliquez sur le bouton de fermeture à gauche. Dans la fenêtre contextuelle, cliquez sur Oui pour enregistrer la modification.
-
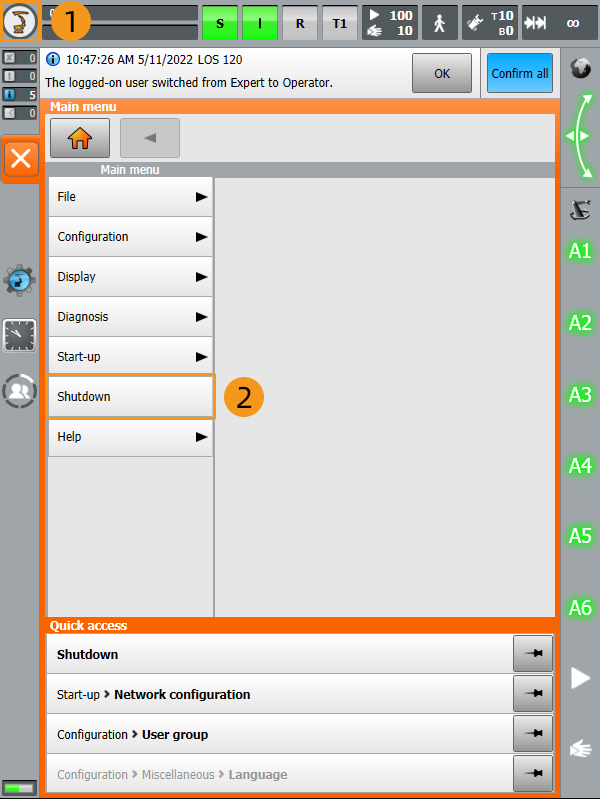
Suivez les instructions de passage en mode Expert pour basculer en mode Administrateur. Cliquez sur
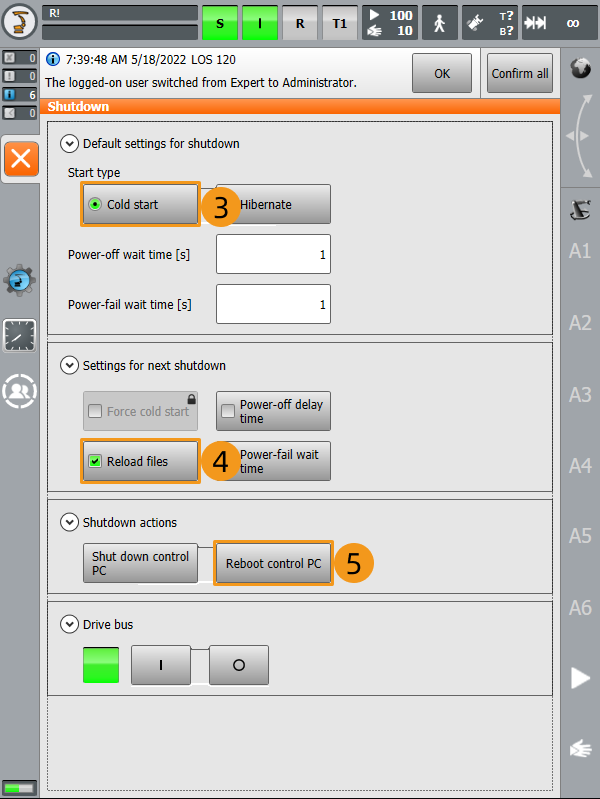
. Dans le menu contextuel, sélectionnez Arrêt pour accéder à l’interface d’arrêt.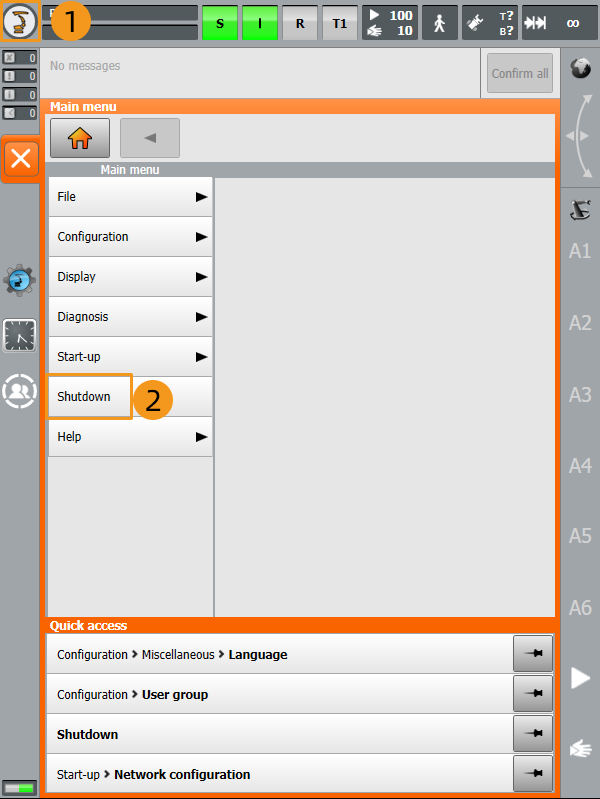
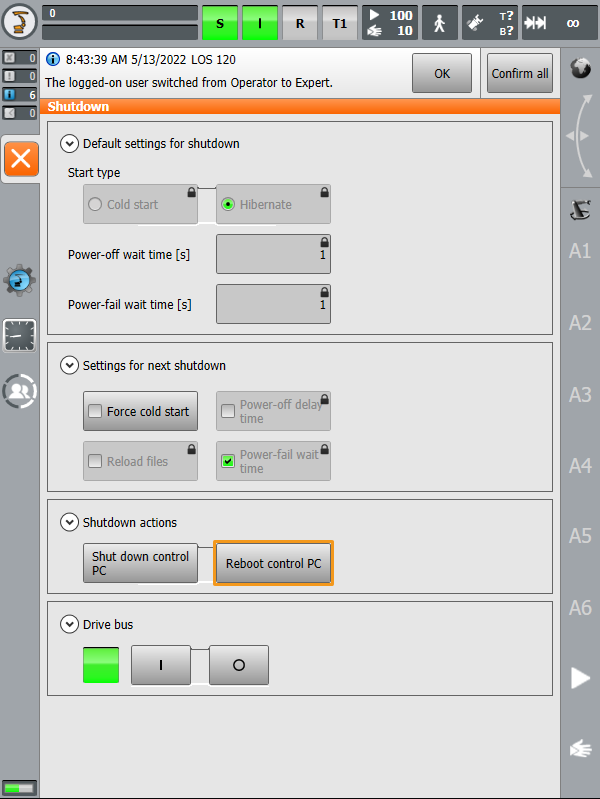
-
Sélectionnez Démarrage à froid, Recharger les fichiers et Redémarrer le PC de contrôle.
-
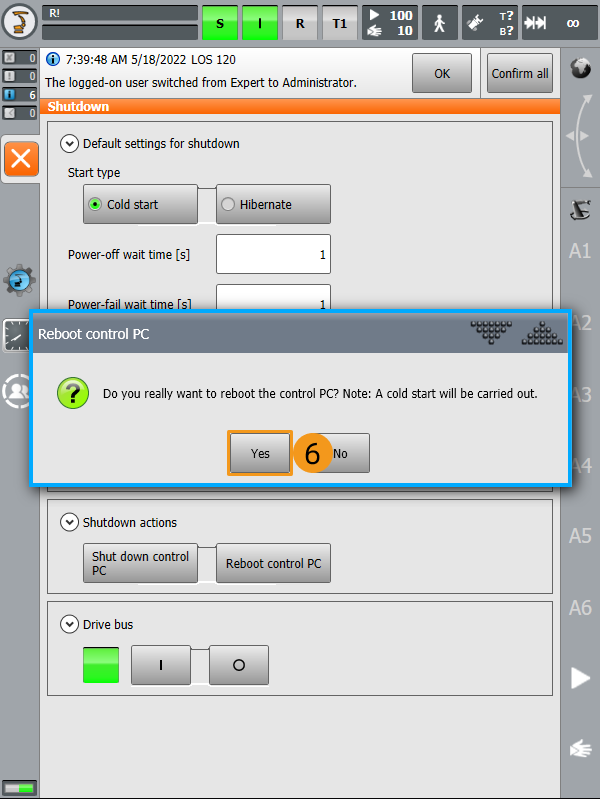
Dans la fenêtre contextuelle, cliquez sur Oui pour redémarrer le robot.
Tester la communication de l’interface standard
Sélectionner le programme pour tester la communication
-
Suivez les instructions de passage en mode Expert pour basculer en mode Administrateur.
-
Ouvrez le dossier
KRC:\R1\mm, sélectionnez MM_COMTEST.src, puis cliquez sur Sélectionner.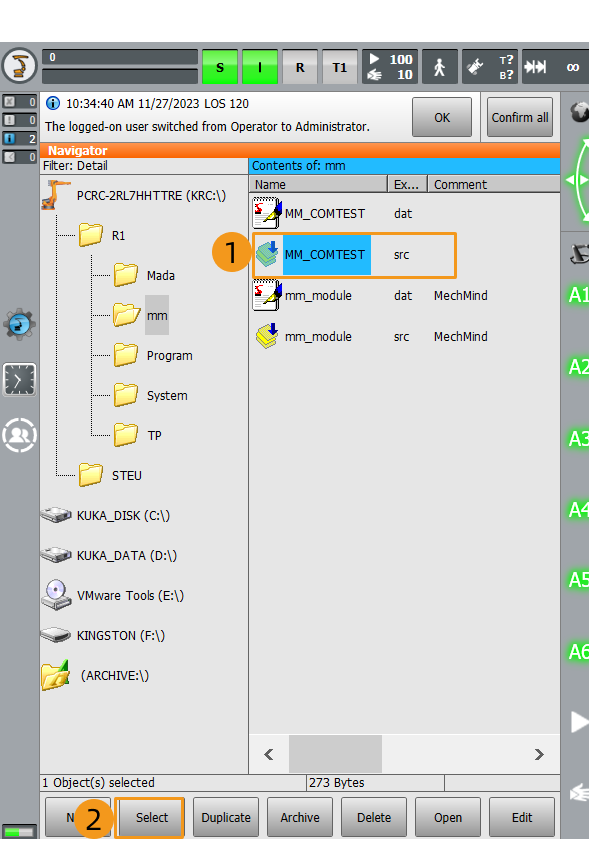
Exécuter le programme et tester la connexion
Avant de commencer, nous vous recommandons de consulter les instructions suivantes pour apprendre à basculer entre les modes d’exécution.
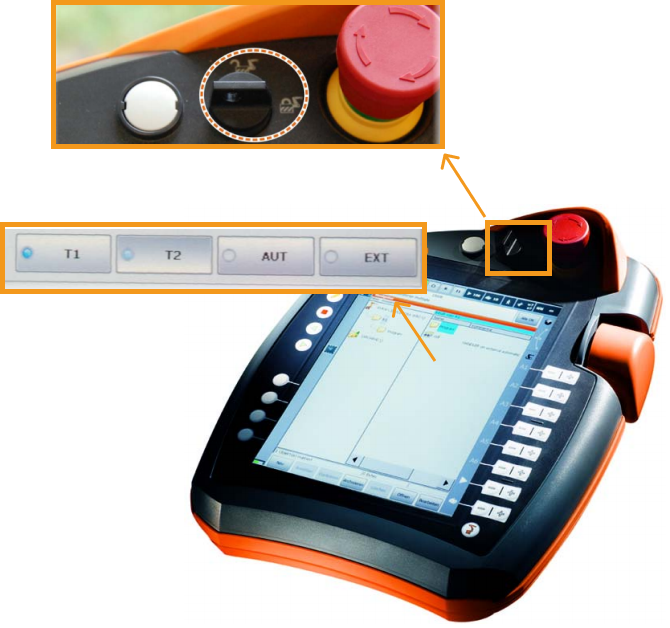
Tournez l’interrupteur à clé en position horizontale. Sélectionnez le mode d’exécution, par exemple, T1 ou AUT, dans la boîte de dialogue contextuelle à l’écran. Ensuite, remettez l’interrupteur en position verticale.
| T1 correspond au mode Manuel à vitesse réduite, et AUT correspond au mode Automatique. |
-
Suivez les instructions ci-dessus pour passer en mode T1.
-
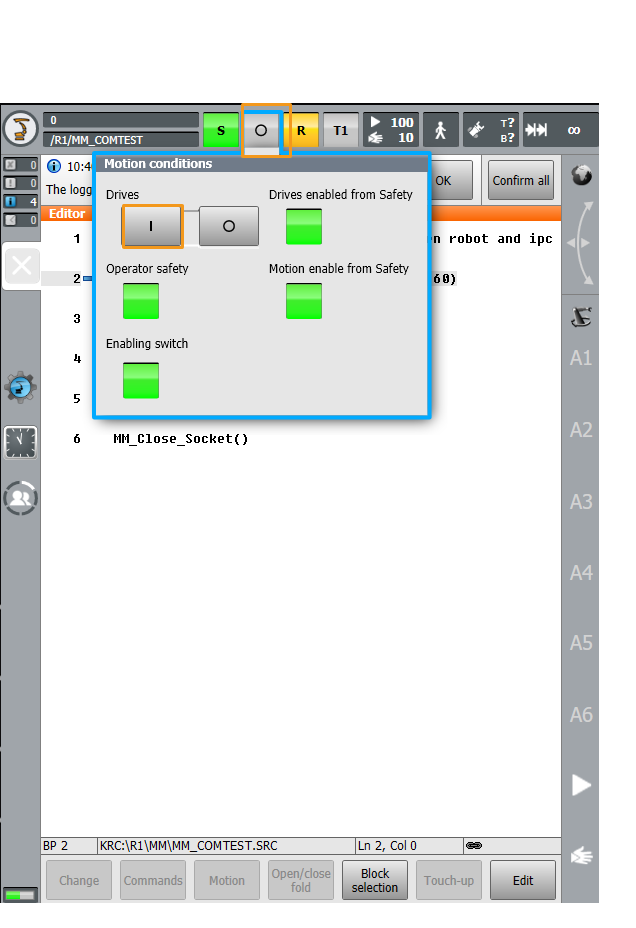
Cliquez sur O. Dans la fenêtre contextuelle, cliquez sur I pour régler Entraînements sur I. Si Entraînements est déjà réglé sur I, passez cette étape.
-
Sélectionnez
 et définissez le Mode d’exécution du programme sur Go.
et définissez le Mode d’exécution du programme sur Go.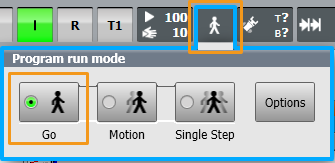
-
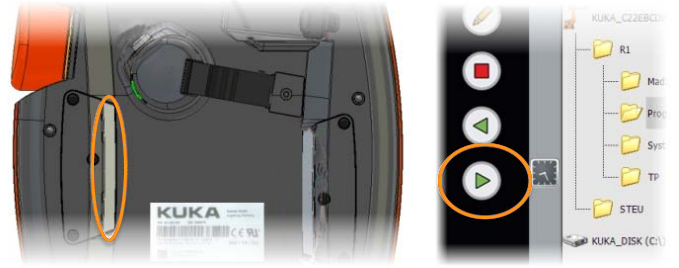
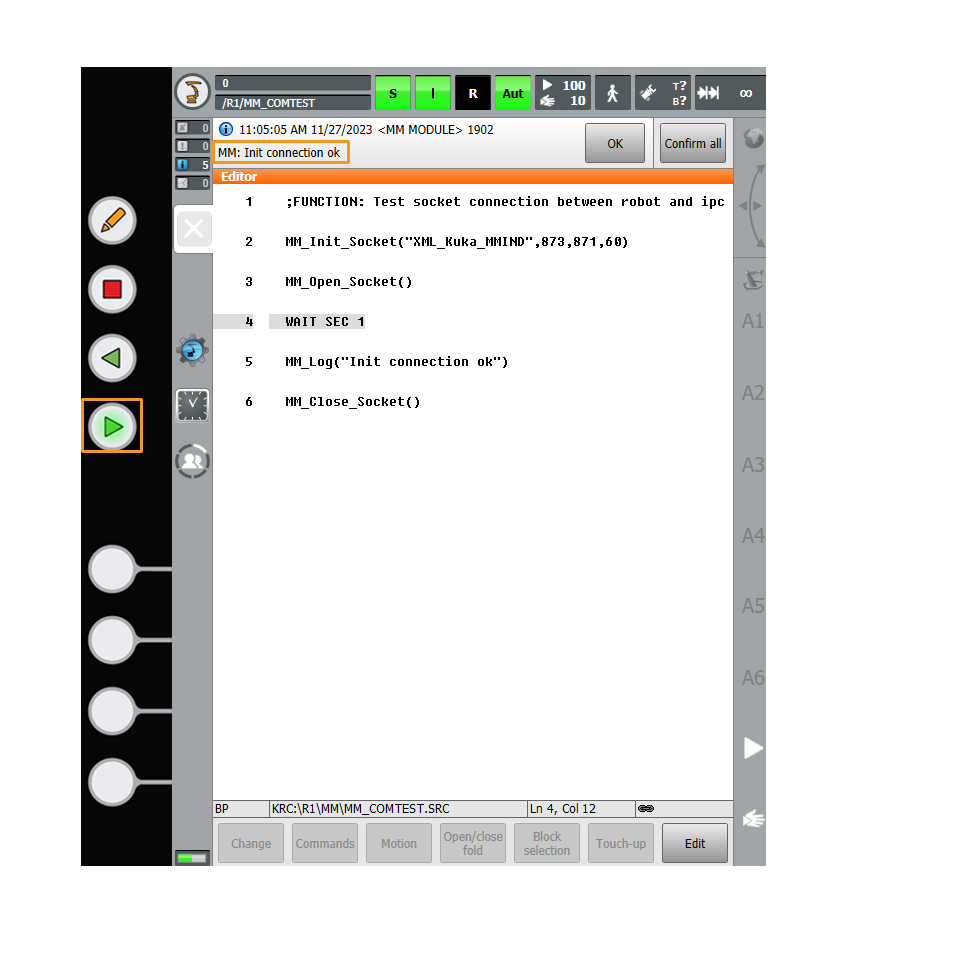
Appuyez à mi-course sur l'interrupteur d’activation blanc et appuyez sur le bouton démarrer vert pour exécuter le programme. Lorsque R devient vert, le programme est en cours d’exécution. Après l’exécution du programme, MM:Init Connection ok s’affiche. Dans ce cas, relâchez l'interrupteur d’activation.
-
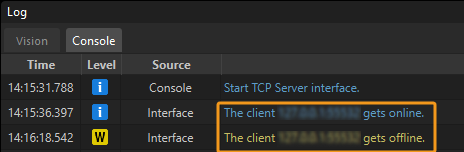
Si la communication entre le robot et le système de vision est établie, un journal sera enregistré dans l’onglet Console du panneau Log de Mech-Vision.