Configuration de la communication maître-contrôle
Ce guide explique comment configurer la communication maître-contrôle avec un robot KUKA.
Préparation
Vérifier la compatibilité du contrôleur et du logiciel
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Modèle de contrôleur : KUKA KR C4
-
Version du système du contrôleur : KSS 8.2, 8.3, 8.5 ou 8.6
Cliquez ici pour les instructions
-
Cliquez sur
 , puis sélectionnez .
, puis sélectionnez .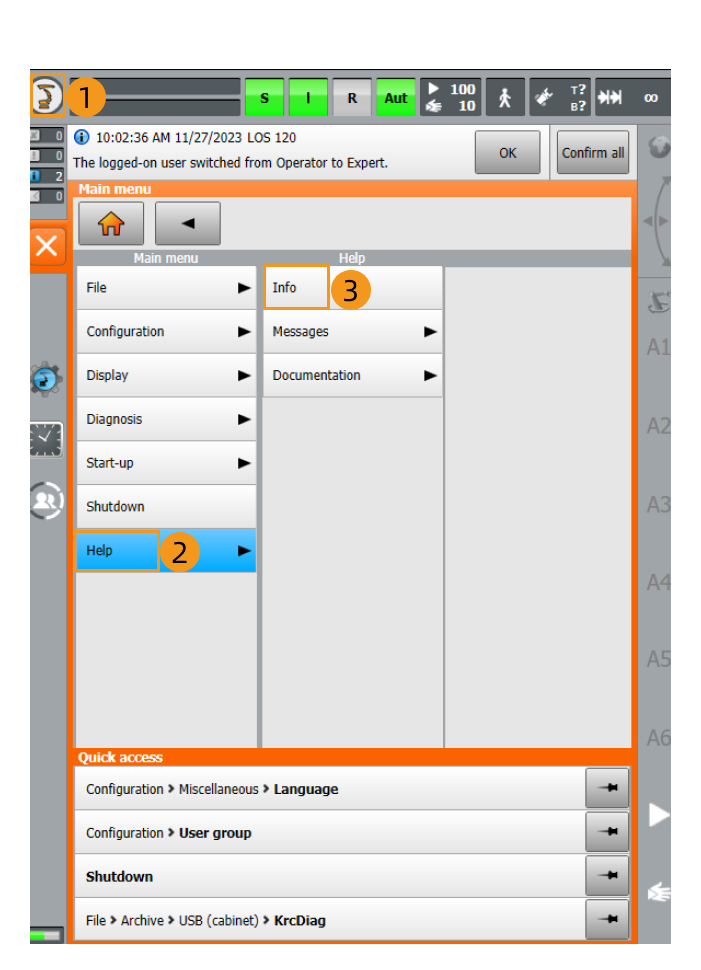
-
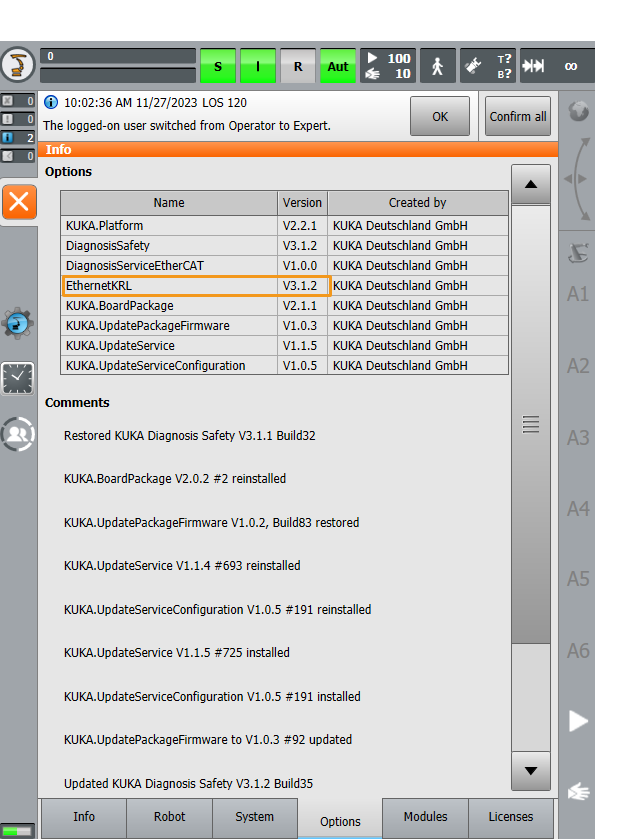
Vérifiez la version du logiciel système du contrôleur dans l’interface Info.

-
-
Paquet logiciel complémentaire : Ethernet KRL (V 2.2.8, 3.0.3 ou 3.1.2.29)
La correspondance entre les versions KSS et Ethernet KRL est la suivante :
Version KSS Version Ethernet KRL 8.2 ou 8.3
2.2.8
8.5
3.0.3
8.6
3.1.2.29
Cliquez ici pour les instructions
Cliquez sur Options dans l’interface Info pour afficher la version d’Ethernet KRL.
Configurer la connexion réseau
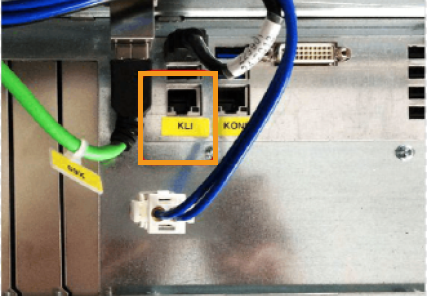
Définir l’adresse IP
-
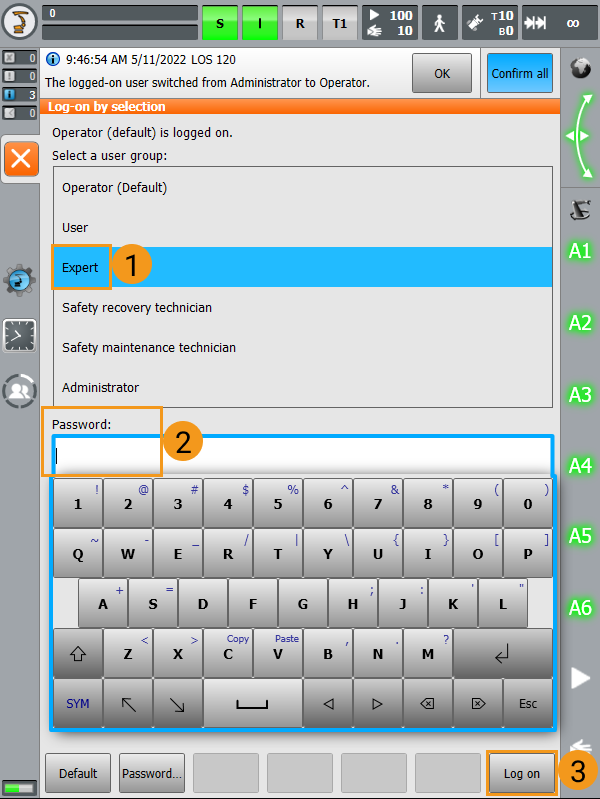
Passer en mode Expert :
-
Cliquez sur
, puis sélectionnez pour entrer dans l’interface de connexion.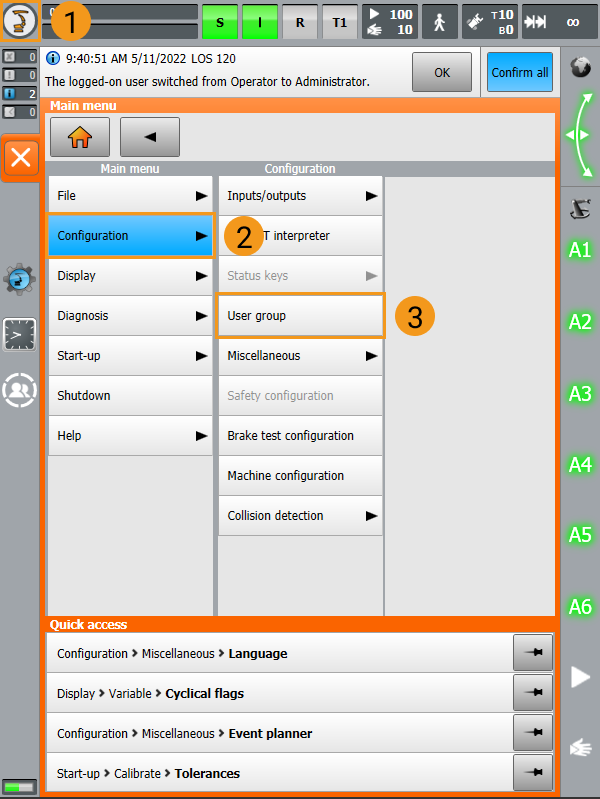
-
Sélectionnez Expert, saisissez le mot de passe (le mot de passe par défaut est kuka), puis cliquez sur Connexion.
-
-
Définir l’adresse IP :
-
Cliquez sur
, puis sélectionnez pour accéder à l’interface de configuration réseau.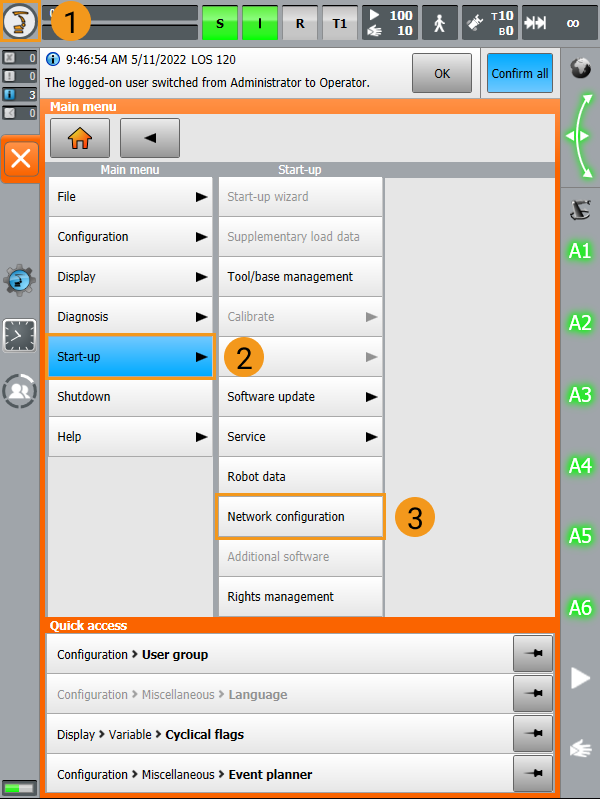
-
Saisissez une adresse IP dans le même sous-réseau que celui de l’IPC, puis cliquez sur Enregistrer. Cliquez respectivement sur Oui et OK dans les deux fenêtres contextuelles suivantes.
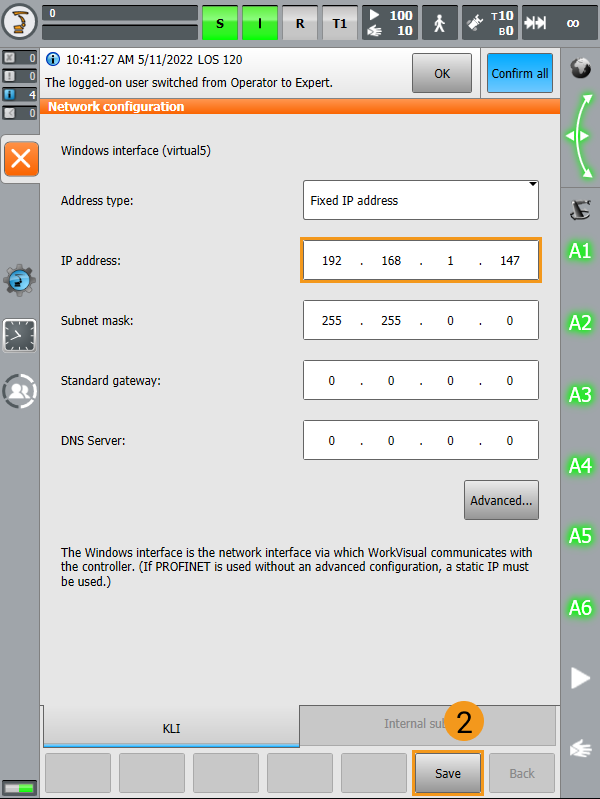
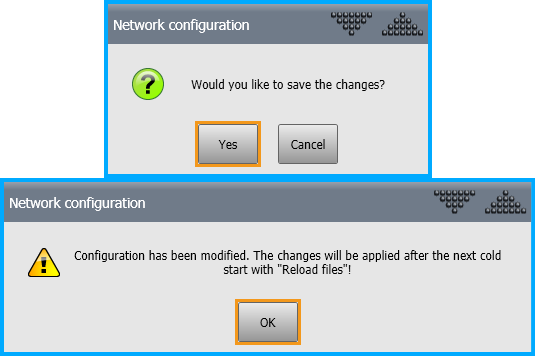
-
-
Redémarrez le contrôleur du robot pour terminer le réglage de l’adresse IP :
-
Cliquez sur
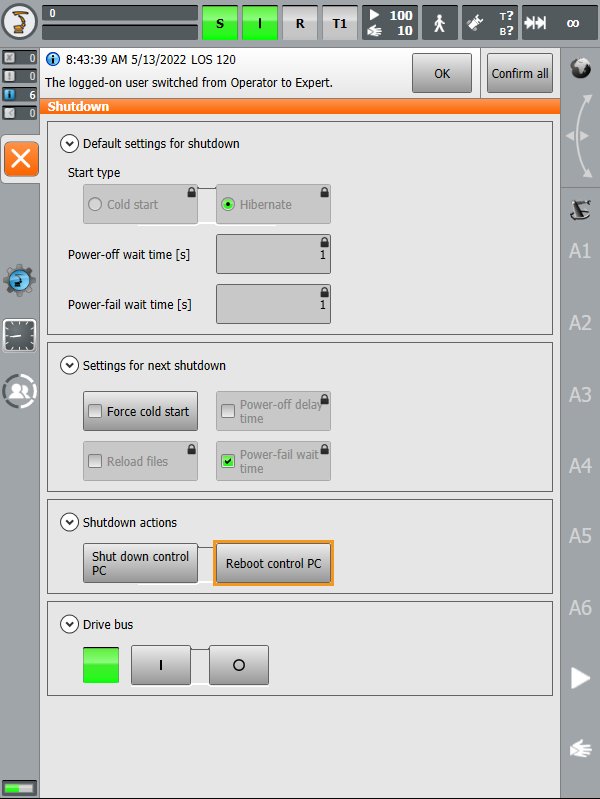
, et sélectionnez Arrêt pour accéder à l’interface d’arrêt.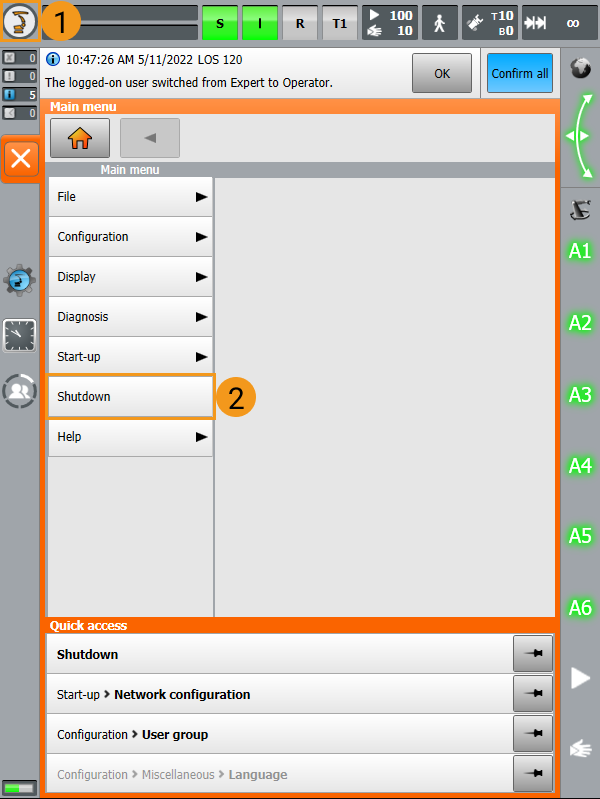
-
Cliquez sur Redémarrer le PC de contrôle dans l’interface d’arrêt.
-
Charger les fichiers de programme sur le robot (Auto)
Vous pouvez effectuer les opérations suivantes pour permettre au chargeur de charger automatiquement les programmes maître-contrôle sur le robot.
| Si le processus de chargement automatique échoue et que vous ne pouvez pas résoudre le problème, passez à Charger les fichiers de programme sur le robot (Manuel). |
-
Accédez à
Communication Component/Robot_Server/Robot_FullControl/kuka/kuka_optdepuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés, ouvrez le dossier souhaité en fonction de la version de votre système robot, puis copiez le fichier Mech-Mind.kop sur votre clé USB. -
Branchez la clé USB sur le contrôleur du robot et passez en mode expert.
Cliquez sur
, puis sélectionnez pour entrer dans l’interface de connexion.
Sélectionnez Expert, saisissez le mot de passe (le mot de passe par défaut est kuka), puis cliquez sur Connexion.
-
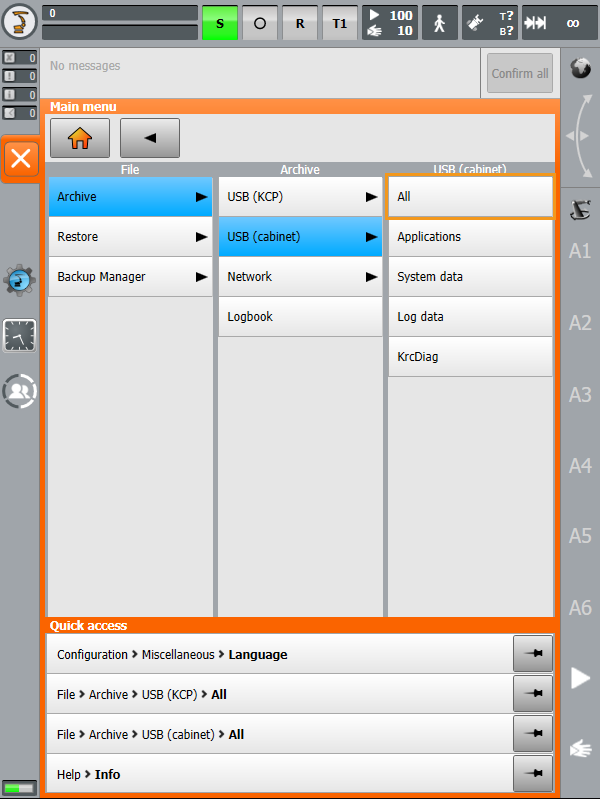
Cliquez sur
, puis sélectionnez .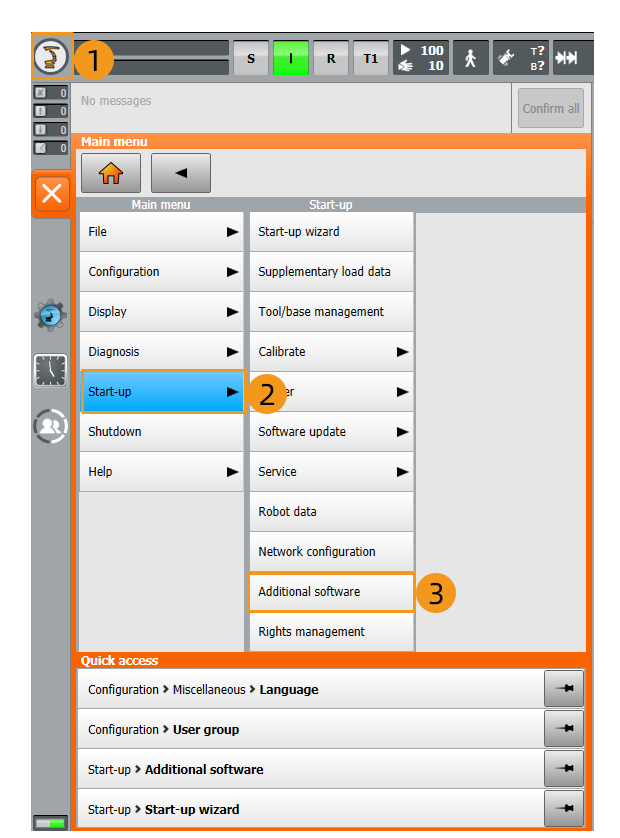
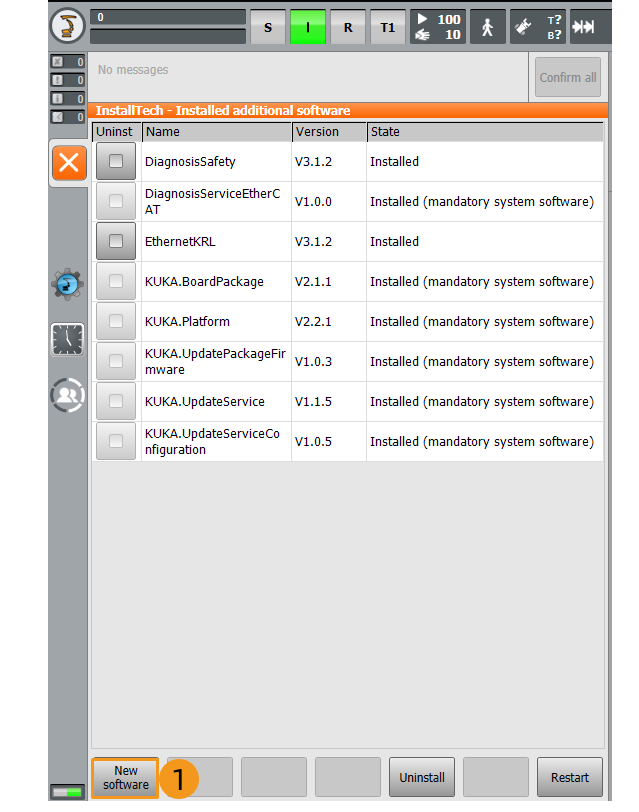
-
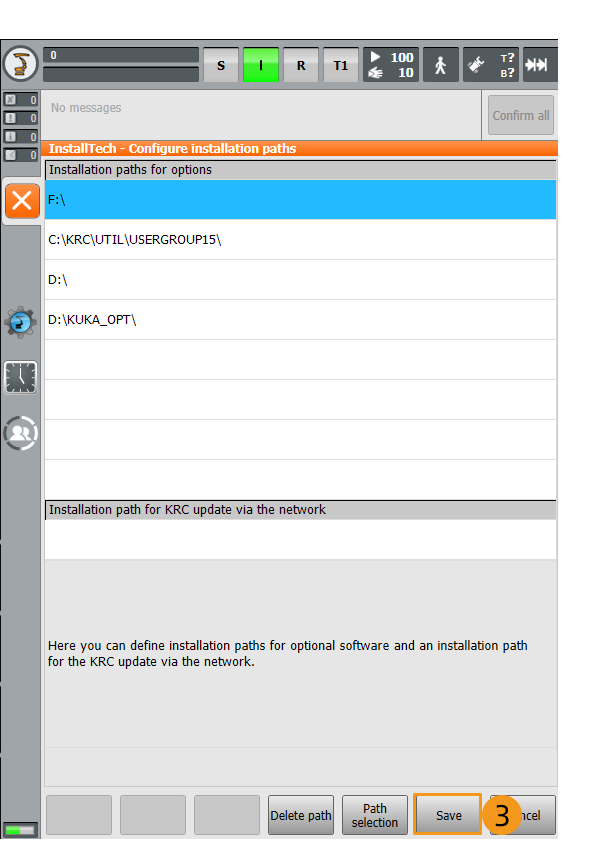
Dans l’interface suivante, sélectionnez .
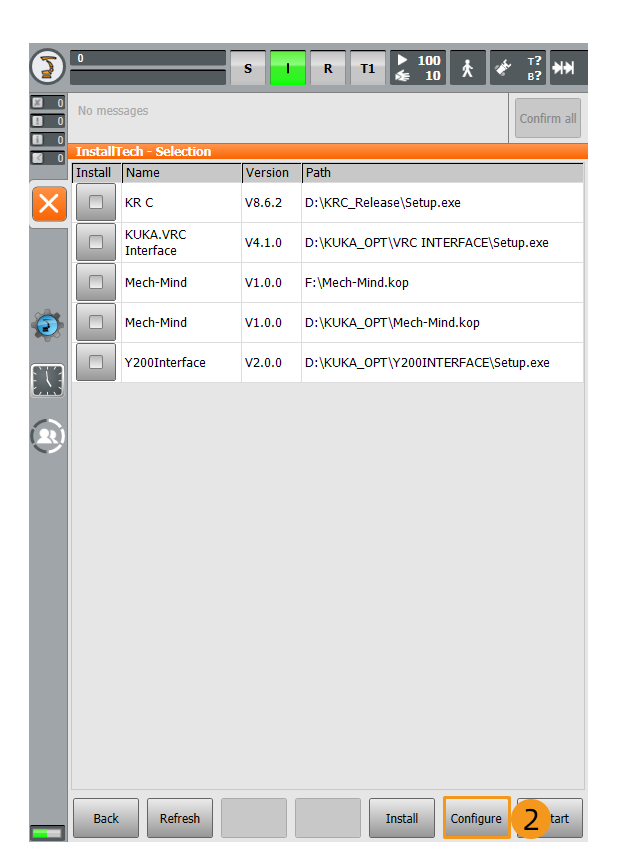
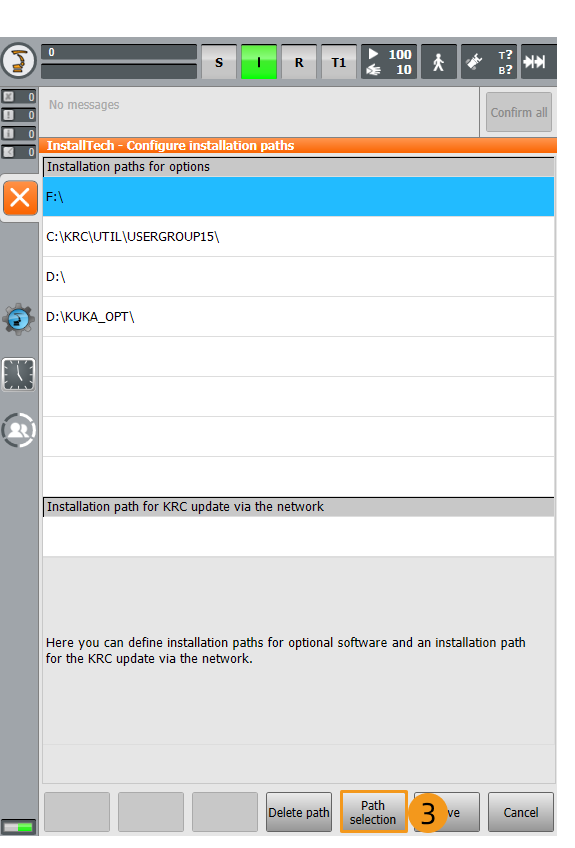
-
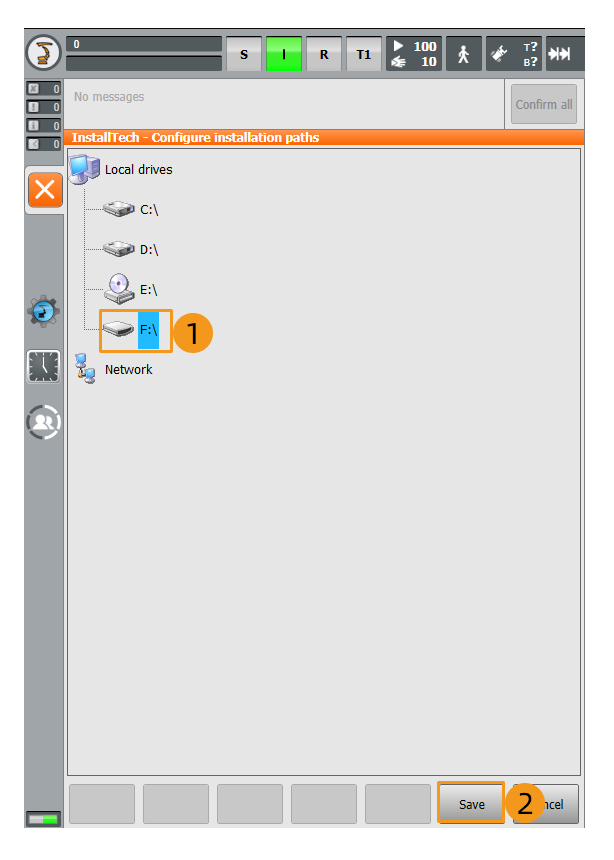
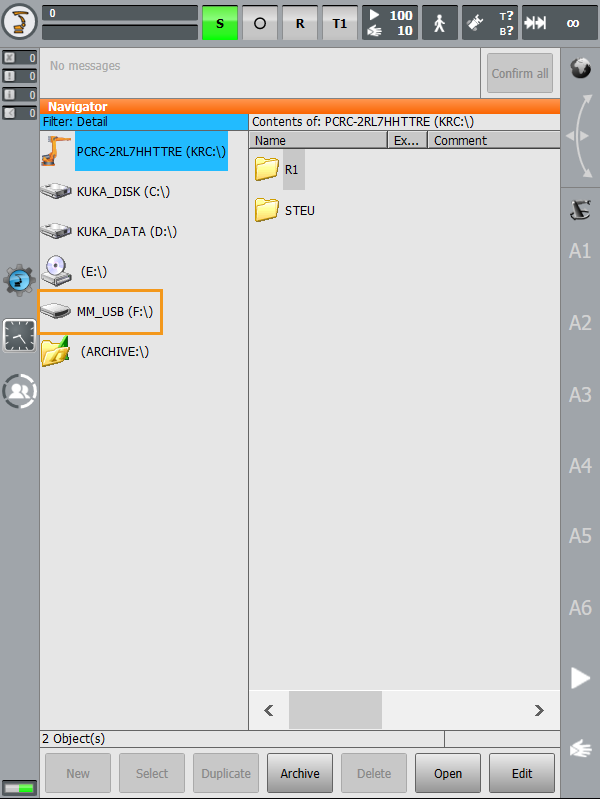
Dans l’interface suivante, sélectionnez le disque correspondant à la clé USB et cliquez sur Enregistrer. Dans cet exemple, le disque F est sélectionné. Le disque réel peut être différent de celui utilisé dans cet exemple. Sélectionnez le disque selon les scénarios réels. Ensuite, revenez à l’interface précédente et cliquez sur Enregistrer.
-
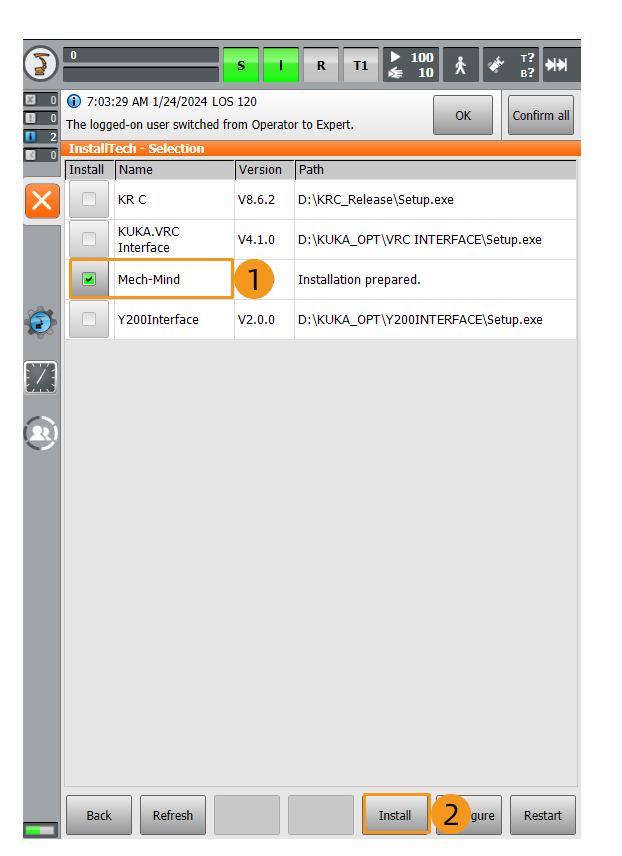
Dans l’interface d’installation, le paquet logiciel Mech-Mind apparaît. Cochez la case à côté du paquet pour le sélectionner et cliquez sur Installer.
-
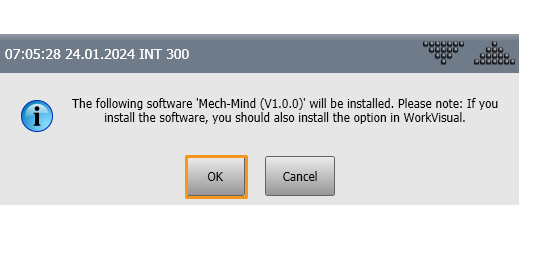
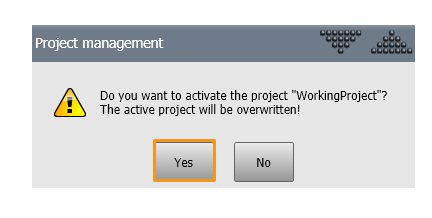
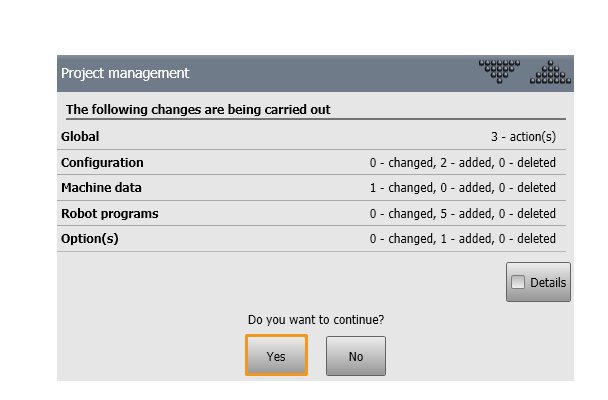
Dans les fenêtres contextuelles suivantes, sélectionnez .
-
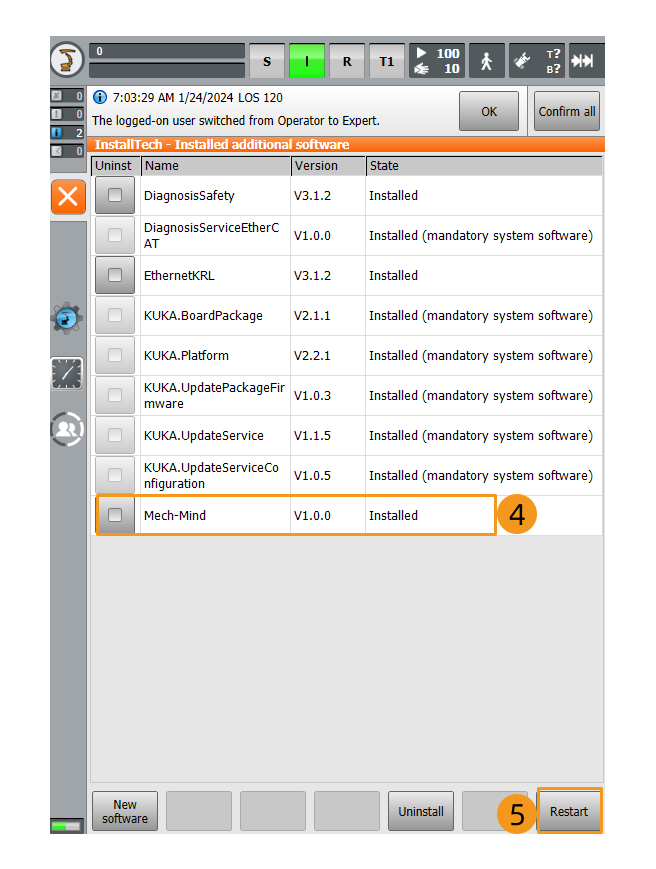
Après l’installation du logiciel, cliquez sur
, sélectionnez , puis vérifiez si Mech-Mind apparaît dans la liste des logiciels installés. Si le logiciel est installé, cliquez sur Redémarrer dans le coin inférieur droit de l’interface pour redémarrer le contrôleur.
-
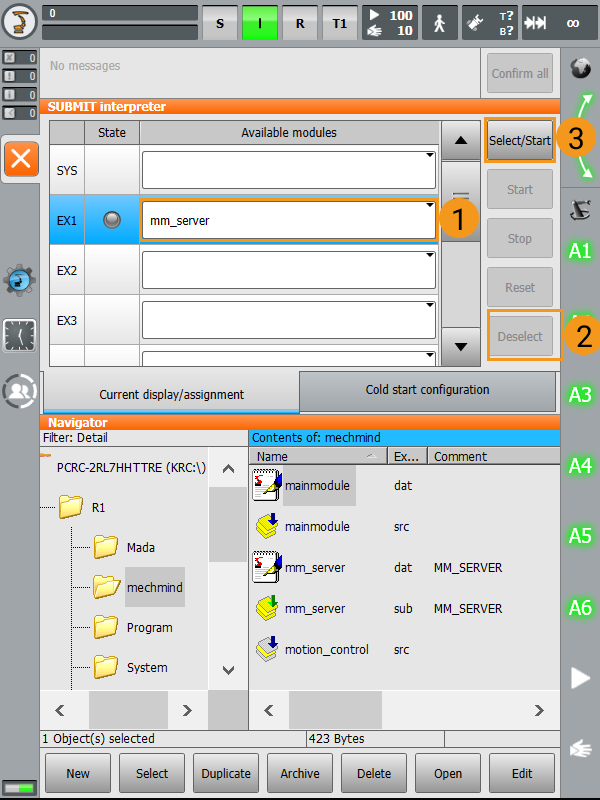
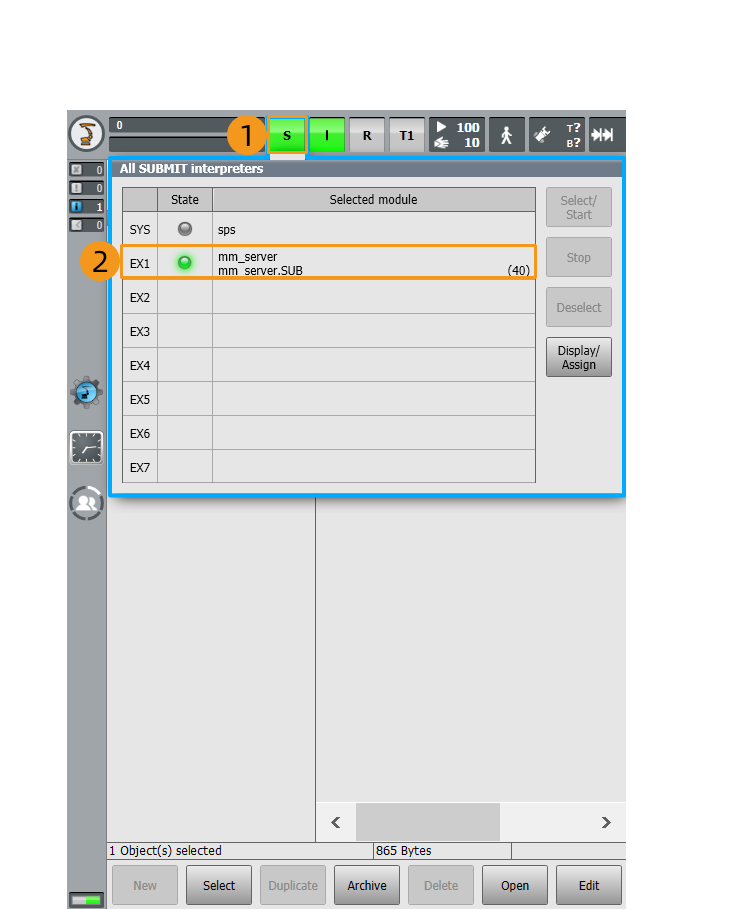
Après le redémarrage du contrôleur, cliquez sur S dans la partie supérieure de l’interface du pupitre de programmation. Si un voyant vert s’affiche dans la colonne État de EX1 et que le module mm_server est sélectionné dans la colonne Module sélectionné, l’installation est terminée.
Après la fin de l’installation, passez à Communication maître-contrôle.
Charger les fichiers de programme sur le robot (Manuel)
| Si vous avez terminé les opérations de Charger les fichiers de programme sur le robot (Auto), passez cette section. |
Passer en mode Expert
-
Cliquez sur
, puis sélectionnez pour entrer dans l’interface de connexion.
-
Sélectionnez Expert, saisissez le mot de passe (le mot de passe par défaut est kuka), puis cliquez sur Connexion.
Sauvegarder le programme du robot
| Assurez-vous d’être passé en mode expert. Sinon, la clé USB ne s’affichera pas sur le pupitre de programmation. |
-
Branchez au contrôleur la clé USB contenant les fichiers de sauvegarde, et assurez-vous que la clé USB s’affiche sur le pupitre de programmation.
-
Cliquez sur
, sélectionnez , puis cliquez sur Oui dans la fenêtre contextuelle pour démarrer le processus de sauvegarde.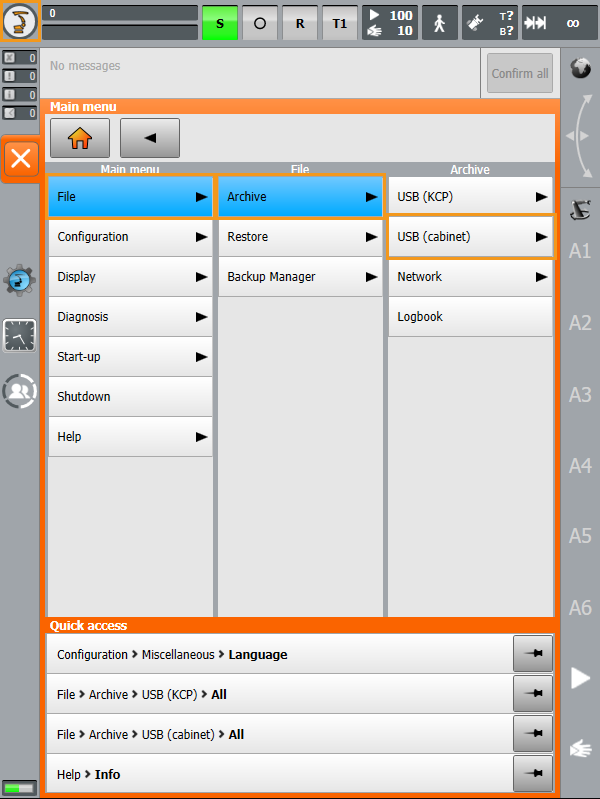
-
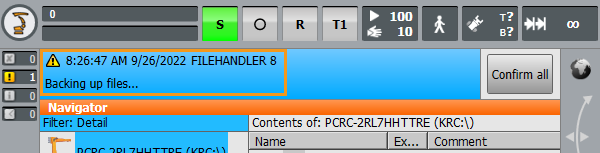
Le message suivant s’affiche pendant la sauvegarde. Une fois la sauvegarde terminée, ce message disparaît et un fichier ZIP est créé sur la clé USB. Enfin, retirez la clé USB.
Préparer les fichiers de programme
-
Accédez à
Communication Component/Robot_Server/Robot_FullControl/kuka/kuka_newdepuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez tous les fichiers de programme sur votre clé USB.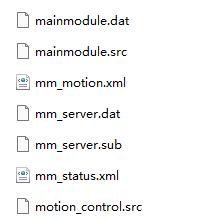
Assurez-vous d’être passé en mode expert. Sinon, la clé USB ne s’affichera pas sur le pupitre de programmation. -
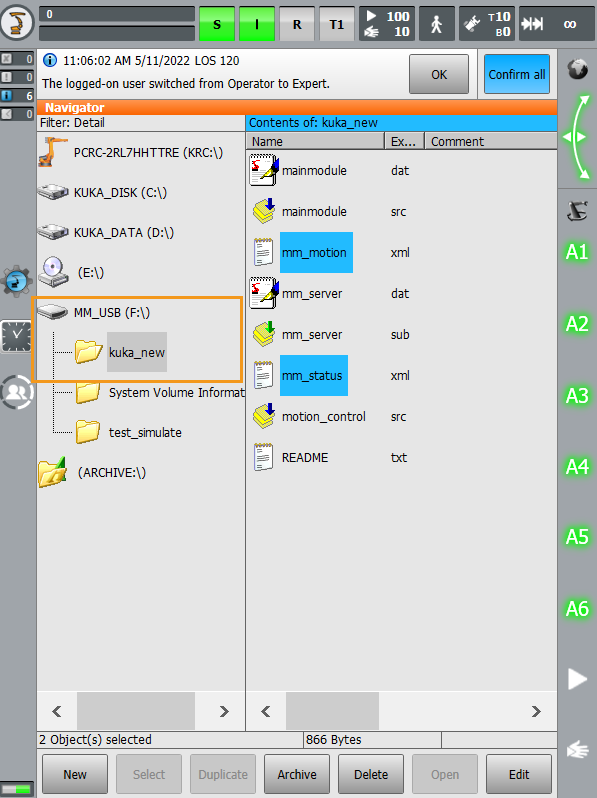
Branchez la clé USB au contrôleur, cliquez sur la clé USB sur le côté gauche du pupitre de programmation, puis localisez le dossier contenant les fichiers de programme.
-
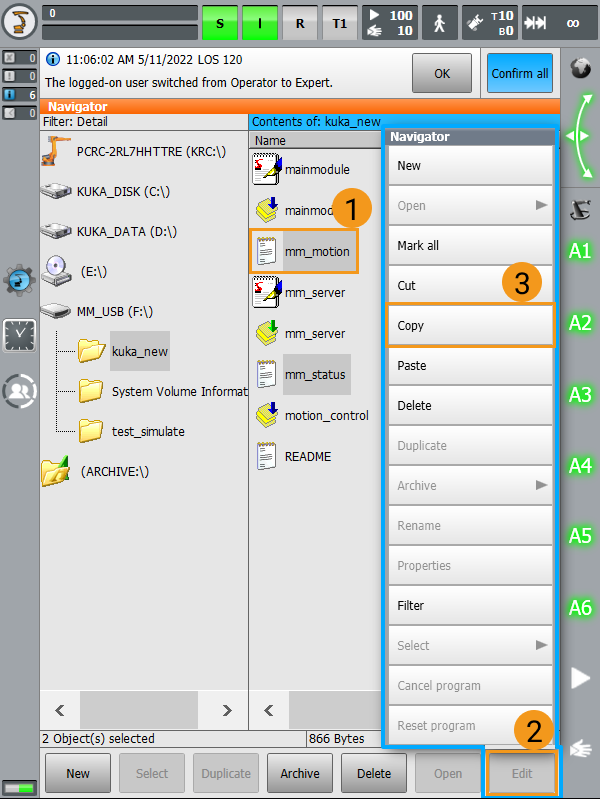
Sélectionnez le fichier mm_motion, cliquez sur Modifier, puis cliquez sur Copier dans la barre de menu contextuelle.
-
Accédez à
C:\\KRC\\ROBOTER\\Config\\User\\Common\\EthernetKRL, cliquez sur Modifier, puis sélectionnez Coller dans la barre de menu contextuelle. Répétez les opérations ci-dessus pour copier le fichier mm_status vers le dossier cible.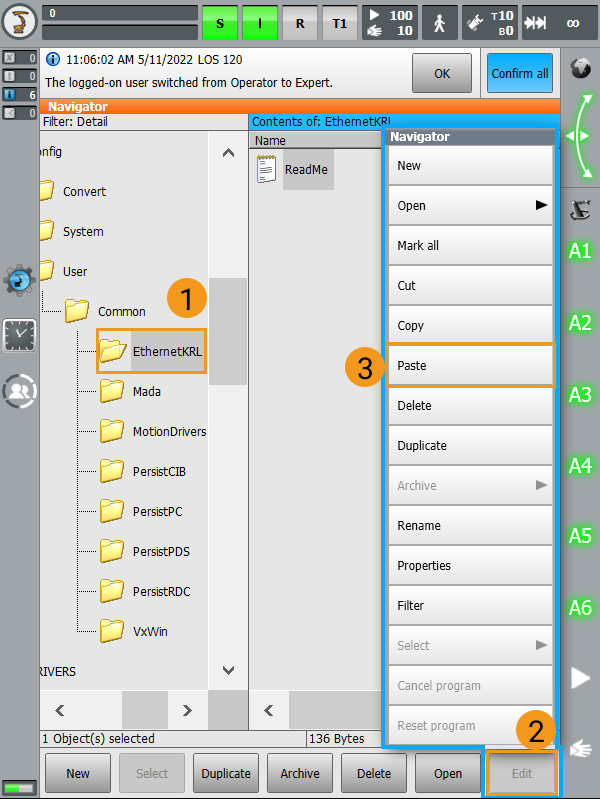
-
Reportez-vous aux opérations ci-dessus pour copier les cinq autres fichiers dans le dossier mechmind du dossier R1. Si le dossier mechmind n’existe pas, créez-le.
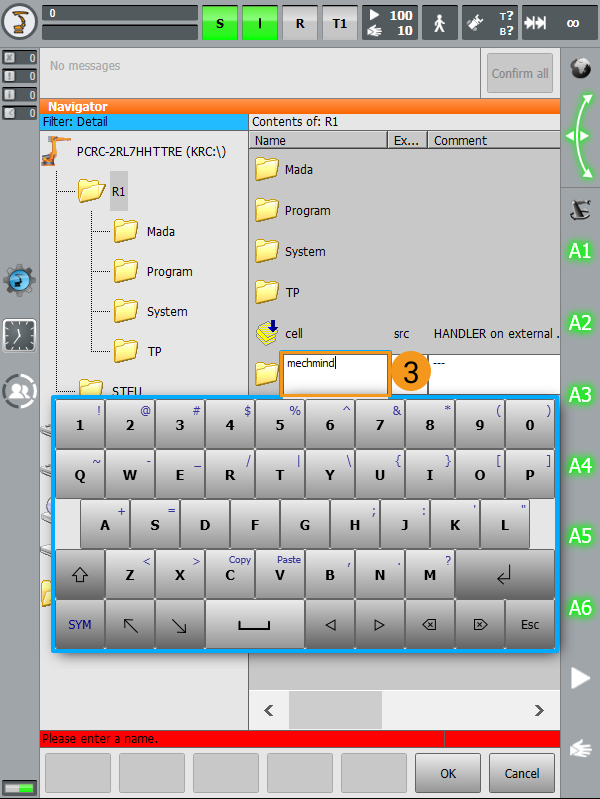
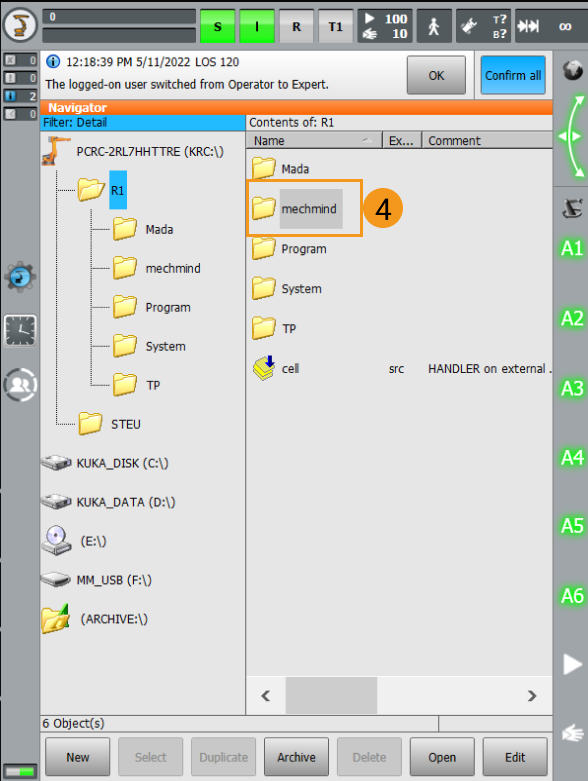
Appuyez longuement et faites glisser pour sélectionner plusieurs fichiers adjacents. Créez le dossier mechmind :
Cliquez sur le dossier R1 et cliquez sur Nouveau.
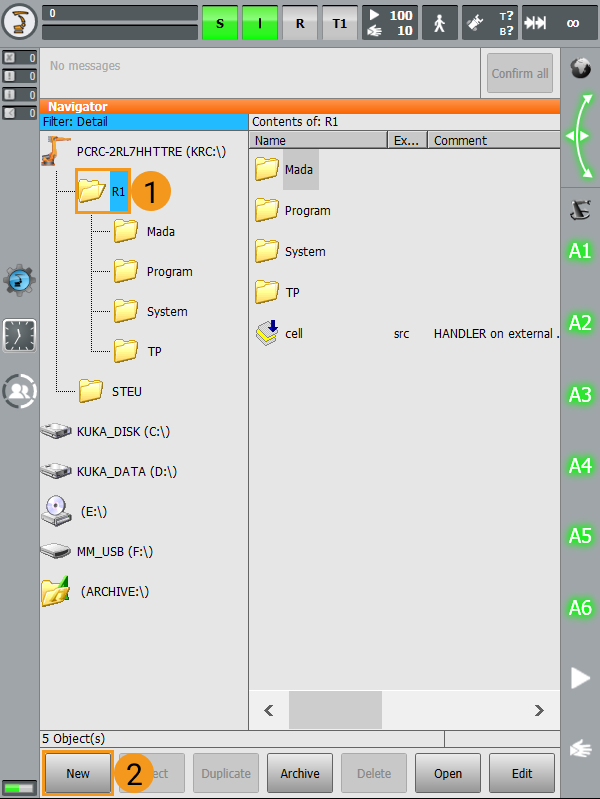
Saisissez mechmind comme nom de dossier dans la fenêtre contextuelle et cliquez sur OK pour créer le dossier mechmind.
Définir le démarrage automatique pour le programme en arrière-plan
Passez en mode expert selon les instructions ci-dessus.
-
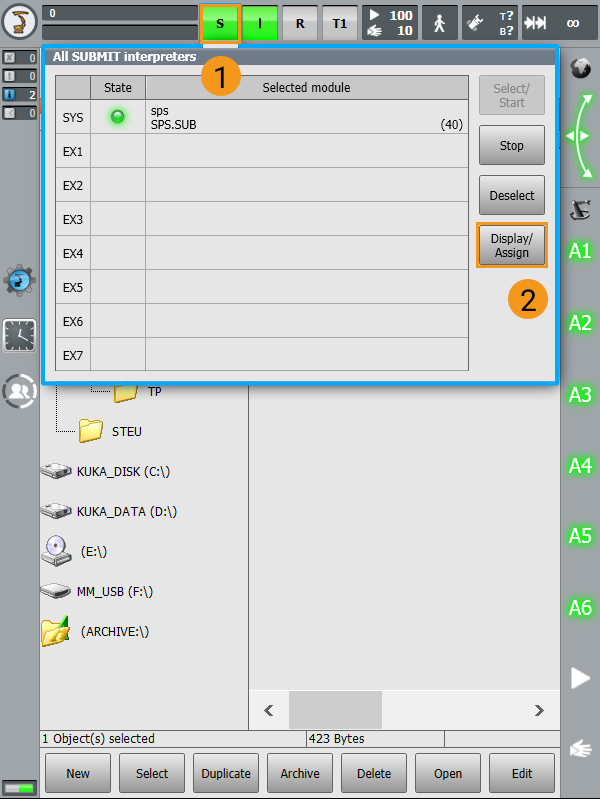
Cliquez sur S sur le pupitre de programmation puis cliquez sur Afficher/Attribuer.
-
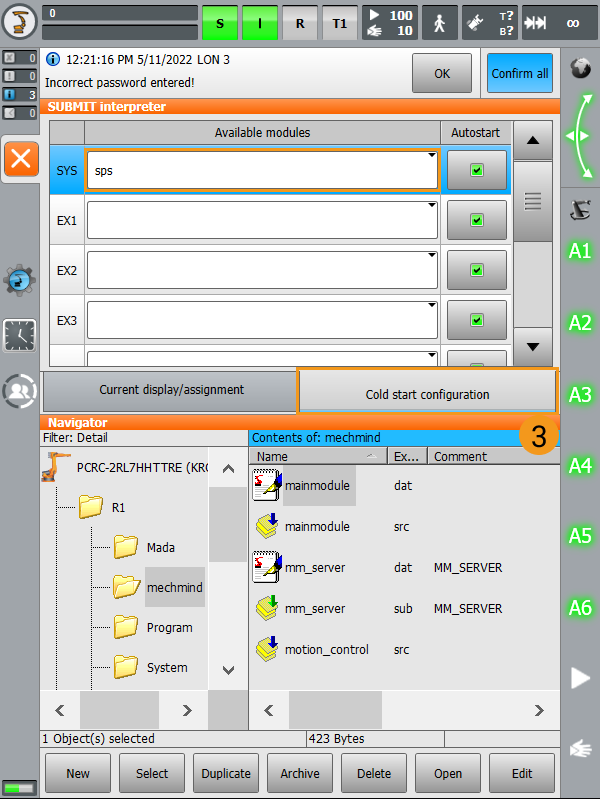
Cliquez sur Configuration démarrage à froid pour accéder à l’interface de configuration du démarrage à froid.
-
Cliquez sur l’élément vide dans le menu déroulant à droite de SYS.
Cette étape n’est pas redondante. Veuillez vous assurer de l’exécuter. 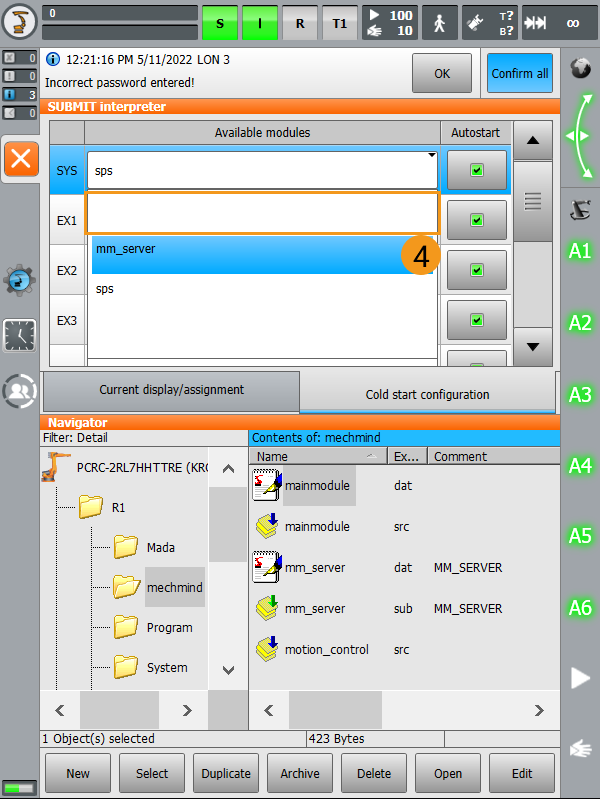
-
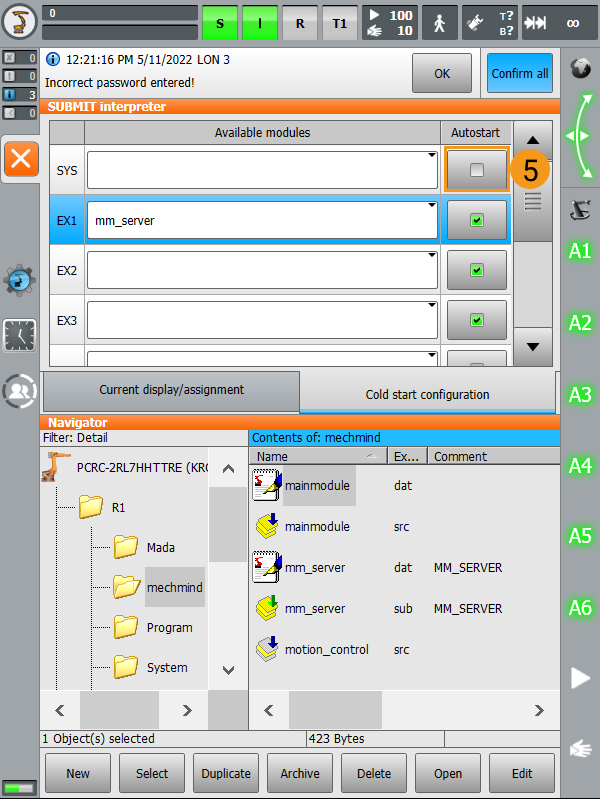
Ensuite, décochez la case Autostart à droite de SYS pour annuler l’option de démarrage automatique.
-
De même, sélectionnez mm_server dans le menu déroulant pour EX1 et assurez-vous que Autostart est coché.
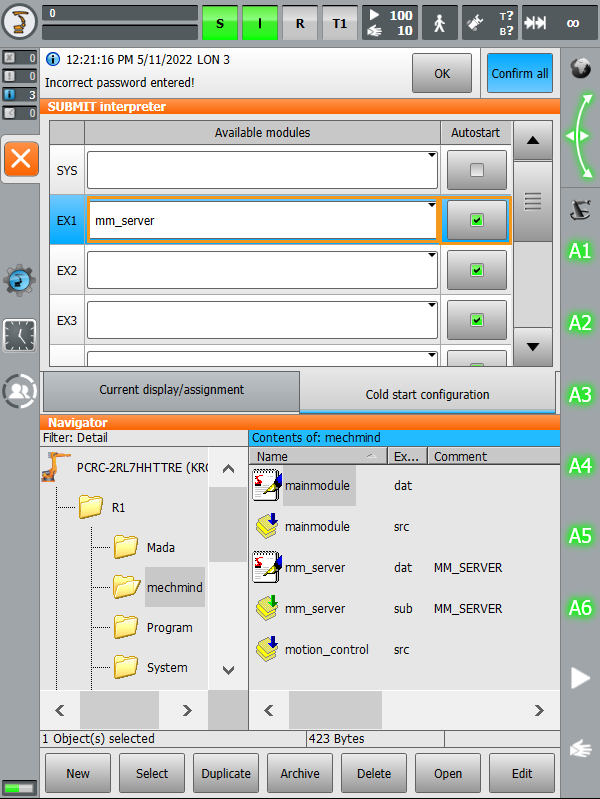
-
Cliquez sur Affichage/assignation actuelle pour accéder à l’interface d’affichage/assignation actuelle. Cliquez sur la zone de texte à droite de SYS, puis cliquez sur Désélectionner.
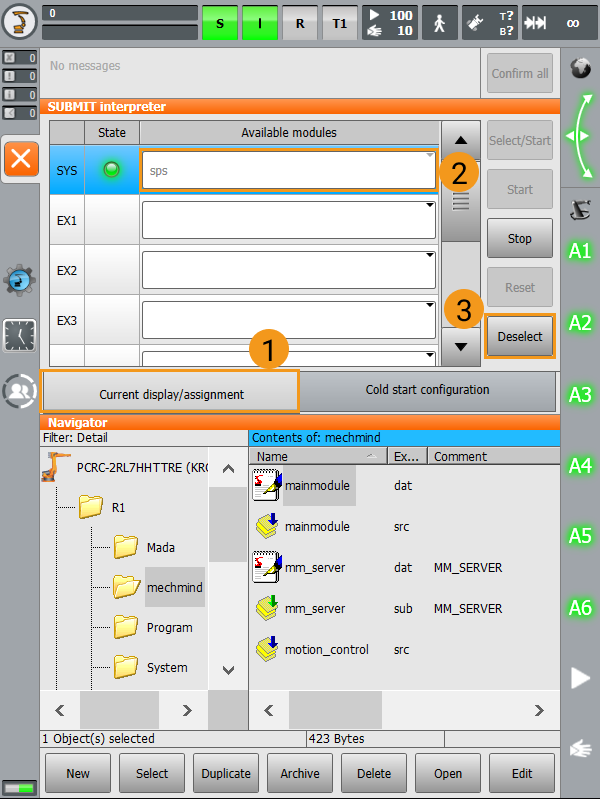
-
Cliquez à nouveau sur la zone de texte à droite de SYS, puis sélectionnez l’élément vide dans le menu déroulant.
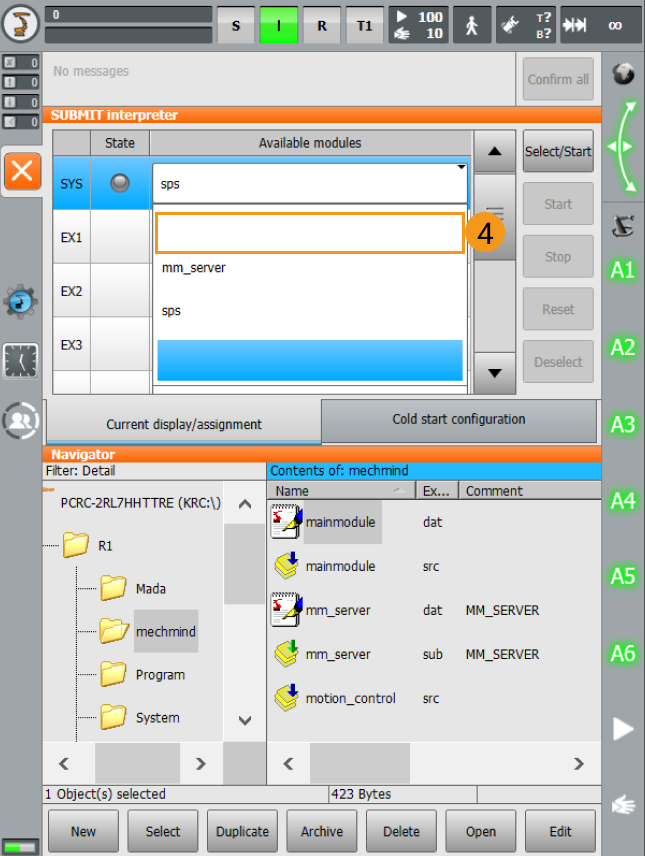
-
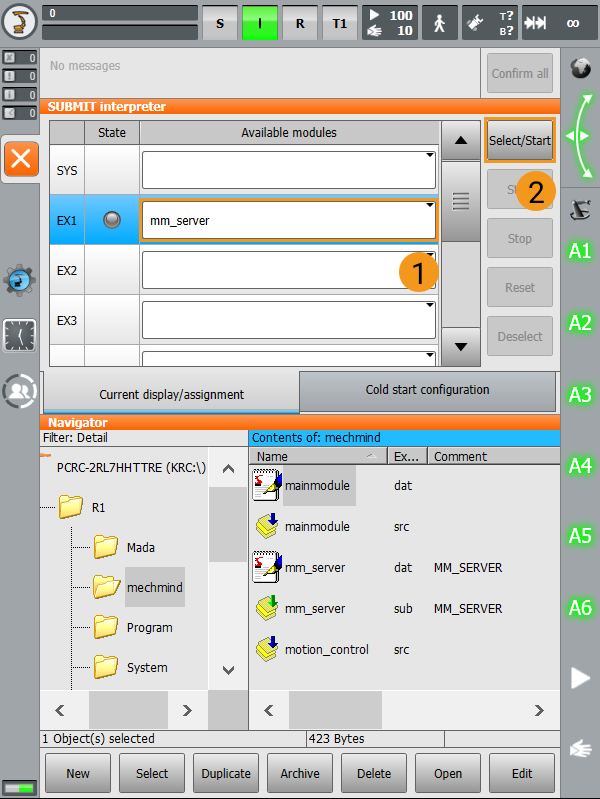
De même, sélectionnez mm_server dans le menu déroulant pour EX1 et cliquez sur Sélectionner/Démarrer.
Tester la communication maître-contrôle
Sélectionner le programme de premier plan
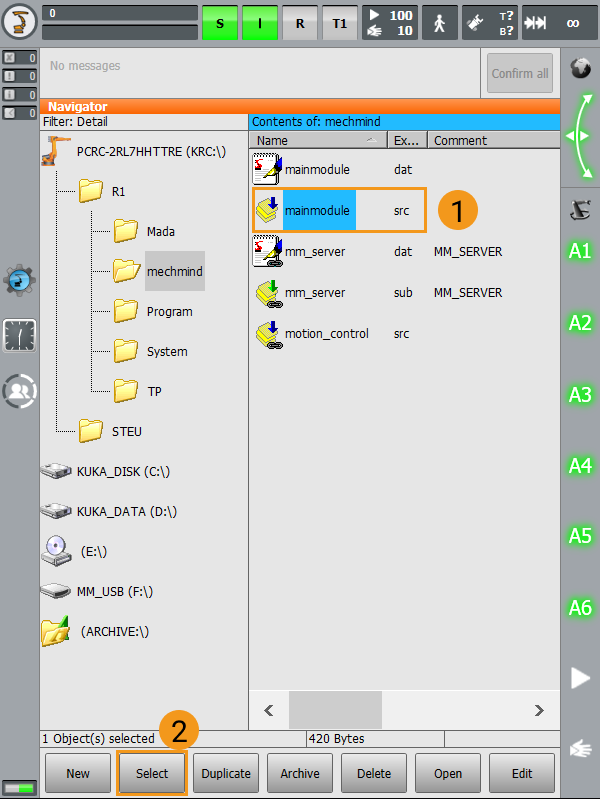
Ouvrez le dossier mechmind, sélectionnez mainmodule.src, puis cliquez sur Sélectionner.
Exécuter le programme en mode AUT
-
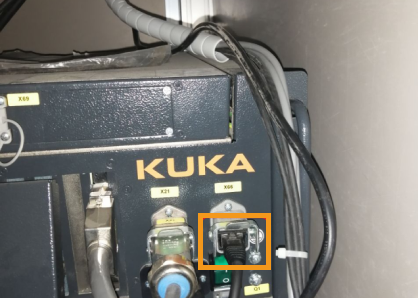
Changez de mode : Tournez le commutateur à clé en position horizontale, sélectionnez T1 ou AUT dans la boîte de dialogue contextuelle à l’écran, puis remettez le commutateur en position verticale.

-
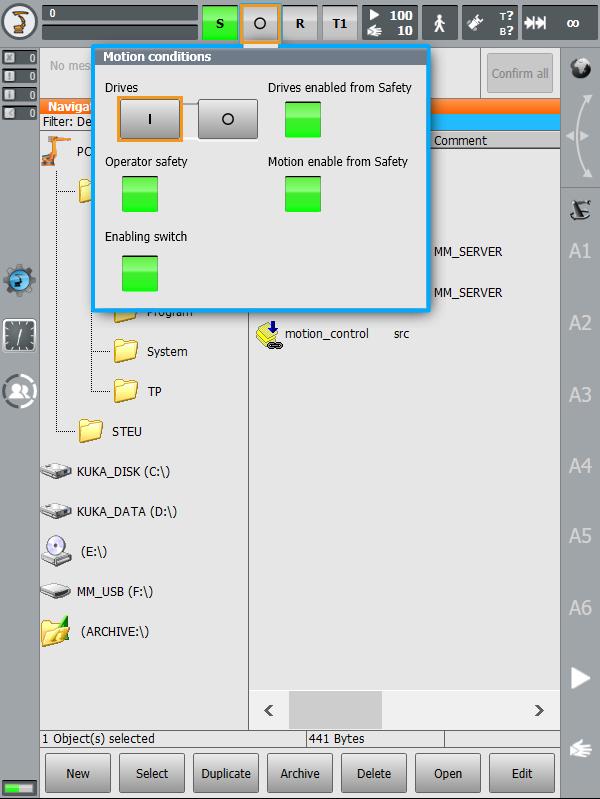
Passez en mode T1 comme décrit à l’étape ci-dessus. Cliquez sur O, puis cliquez sur I dans la fenêtre contextuelle pour changer l’état des Entraînements. Si l’état des Entraînements est I au départ, ignorez cette étape.
-
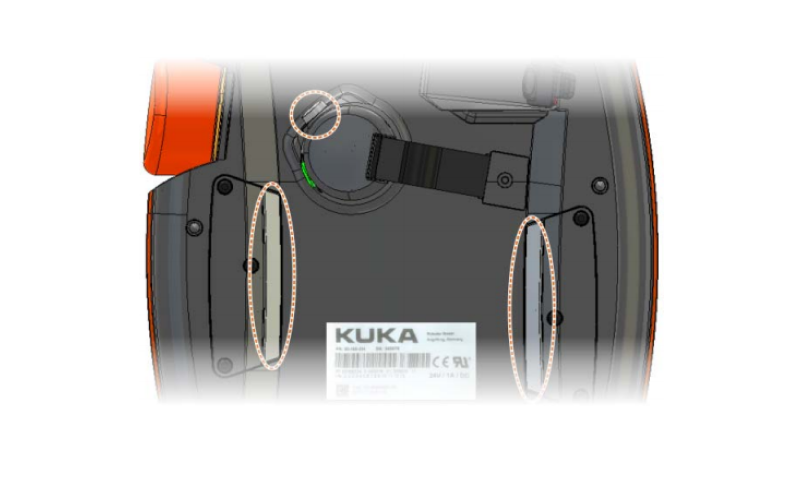
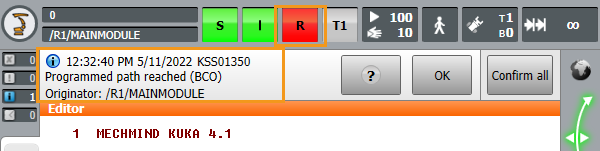
Réglez une vitesse appropriée pour le robot avant de le déplacer et observez ses mouvements afin d’éviter les accidents. Appuyez simultanément sur l’interrupteur d’autorisation (n’importe lequel des trois) au dos du pupitre et sur le bouton vert de démarrage à l’avant pour ramener le robot en position Home. Lorsque l’écran affiche le message Trajectoire programmée atteinte (BCO), relâchez l’interrupteur d’autorisation et le bouton vert de démarrage.
-
Passez en mode AUT selon les opérations précédentes, puis appuyez sur le bouton de démarrage pour exécuter le programme maître-contrôle (l’icône R doit devenir verte).

Créer un projet Mech-Viz
-
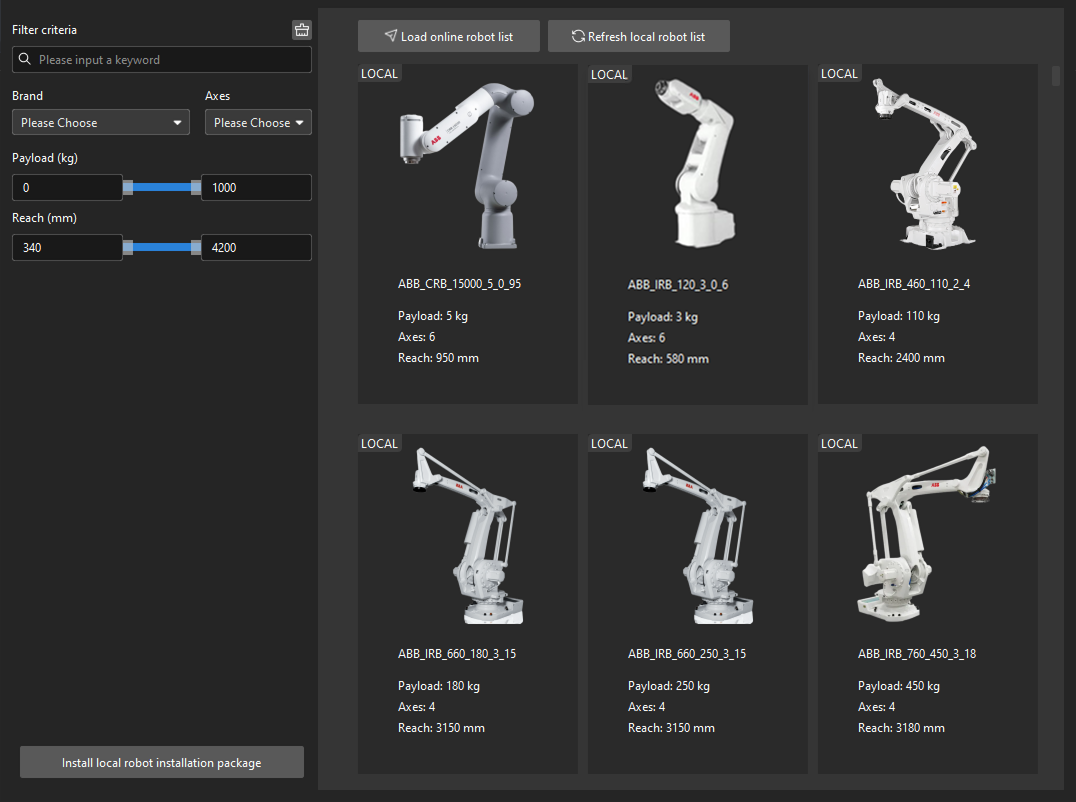
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
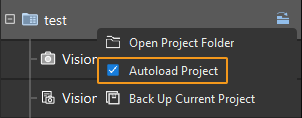
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
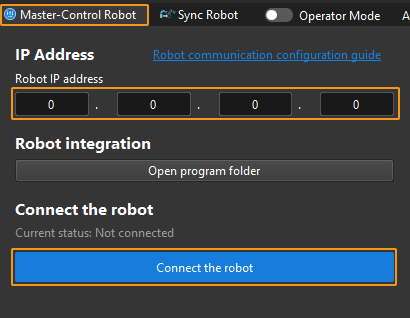
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
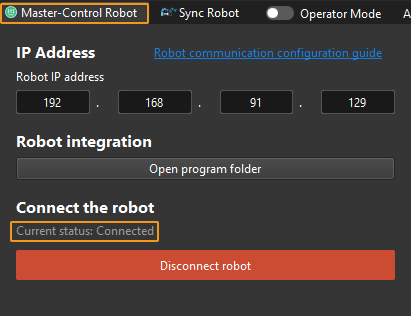
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
Déplacer le robot
-
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
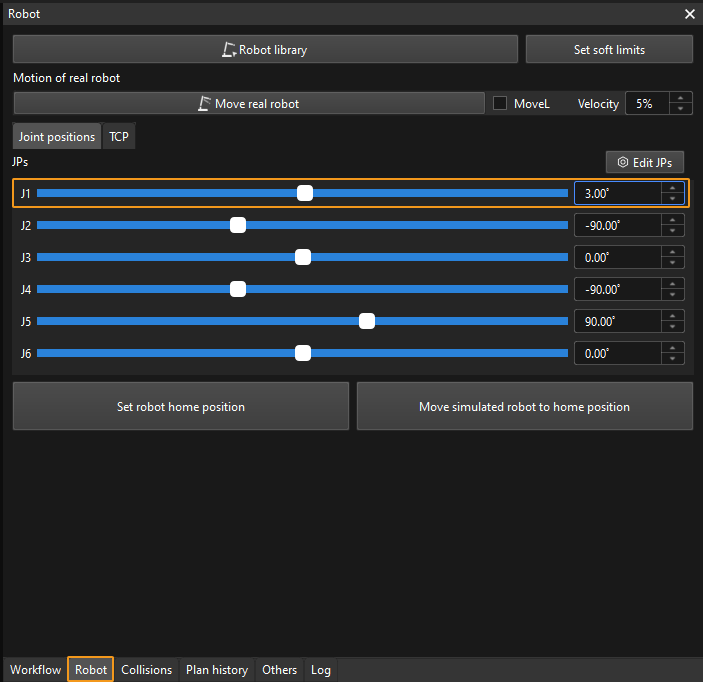
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement ! 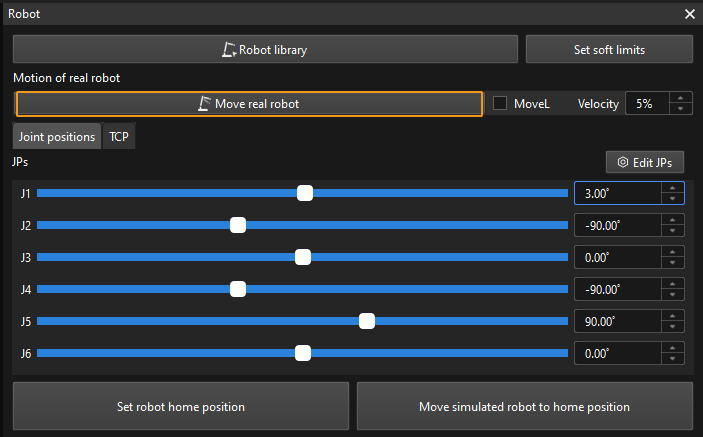
Précautions
-
Si vous n’avez pas réussi à contrôler le robot en mode maître avec Mech-Viz mais pouvez
ping the robot IPdepuis l’IPC, veuillez redémarrer le logiciel Mech-Viz. -
Si le robot perd la communication avec Mech-Viz en cours d’exécution, il tentera automatiquement de se reconnecter. Si le robot ne parvient toujours pas à se connecter à Mech-Viz, vous pouvez essayer de redémarrer le programme en arrière-plan en effectuant ces opérations :
Cliquez sur S, sélectionnez mm_server dans le menu déroulant, cliquez sur Désélectionner, puis cliquez sur Sélectionner/Démarrer. Si un message d’erreur apparaît, cliquez sur Confirmer tout. Après le redémarrage du programme, effectuez les opérations de la section Exécuter le programme en mode AUT.