Annexe
Utiliser Mech-Viz pour la détection de collisions
Si une détection de collisions est requise, veuillez utiliser le projet check_collision.viz stocké dans Communication Component/tool/viz_project/check_collision dans le répertoire d’installation de Mech-Vision & Mech-Viz. Veuillez prêter attention aux points suivants:
-
check_collision.viz n’est qu’un projet d’exemple. Dans le projet, à l’exception des étapes de type mouvement, les étapes du flux de travail ne doivent pas être supprimées ni modifiées dans leurs positions dans le flux de travail. Veuillez sélectionner le modèle de robot réellement utilisé pour le projet.
-
Les étapes de type mouvement peuvent être supprimées, ajoutées ou modifiées selon les besoins réels. Le nombre de poses envoyées doit être identique à celui des étapes de type mouvement dans le flux de travail.
-
Si la position d’origine est requise, une commande pour définir la pose doit être appelée côté robot avant que la commande pour déclencher la capture d’images par la caméra ne soit appelée.
Utiliser Mech-Viz pour contrôler les zones du préhenseur à vide
Pour contrôler différentes zones d’un préhenseur à vide, veuillez utiliser le projet suction_zone.viz stocké dans Communication Component/tool/viz_project/suction_zone dans le répertoire d’installation de Mech-Vision & Mech-Viz. Veuillez prêter attention aux points suivants:
-
suction_zone.viz n’est qu’un projet d’exemple. Dans le projet, à l’exception des étapes de type mouvement, les étapes du flux de travail ne doivent pas être supprimées ni modifiées dans leurs positions dans le flux de travail. Veuillez sélectionner le modèle de robot réellement utilisé pour le projet.
-
Les étapes de type mouvement peuvent être supprimées, ajoutées ou modifiées selon les besoins réels. Le nombre de poses envoyées doit être identique à celui des étapes de type mouvement dans le flux de travail.
-
Si la position d’origine est requise, une commande pour définir la pose doit être appelée côté robot avant que la commande pour déclencher la capture d’images par la caméra ne soit appelée.
-
Veuillez configurer le fichier de ventouse dans le projet.
-
Côté robot, la commande pour déclencher la capture d’images par la caméra doit être appelée en premier, puis la commande pour obtenir la liste des DO doit être appelée.
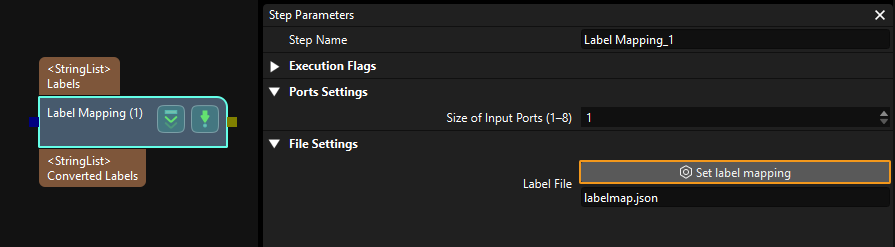
Faire correspondre des étiquettes de type chaîne à des étiquettes entières dans Mech-Vision
Les champs d’étiquette envoyés au robot sont des entiers. L’étape « Mappage des étiquettes » dans le projet Mech-Vision doit être utilisée pour faire correspondre des étiquettes de type chaîne à des étiquettes entières.
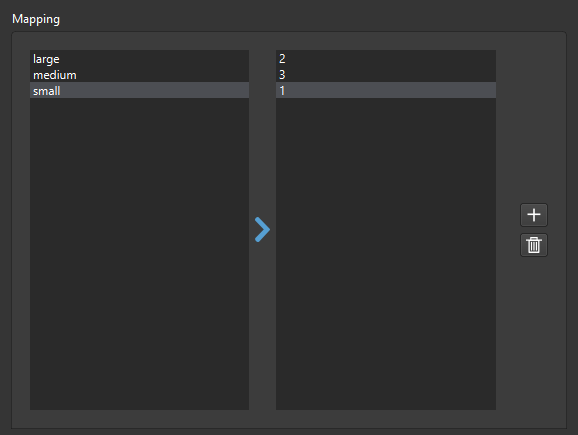
Un exemple de fichier de mappage des étiquettes est le suivant:
{
"large": "2",
"medium": "3",
"small": "1"
}-
« large », « medium » et « small » sont des étiquettes sous forme de chaîne.
-
« 2 », « 3 », « 1 » sont des étiquettes de type entier.
Ajouter un signal indiquant que l’exposition de la caméra est terminée
Pour l’interface standard via PROFINET et Ethernet/IP, un signal indiquant que * l’exposition de la caméra est terminée* peut être utilisé pour raccourcir le temps de cycle du système. Lorsque le projet Mech-Vision met longtemps à s’exécuter, le robot doit se déplacer immédiatement après l’exposition de la caméra. Dans le projet Mech-Vision, veuillez apporter la modification suivante pour implémenter le signal Exposure_Complete.
-
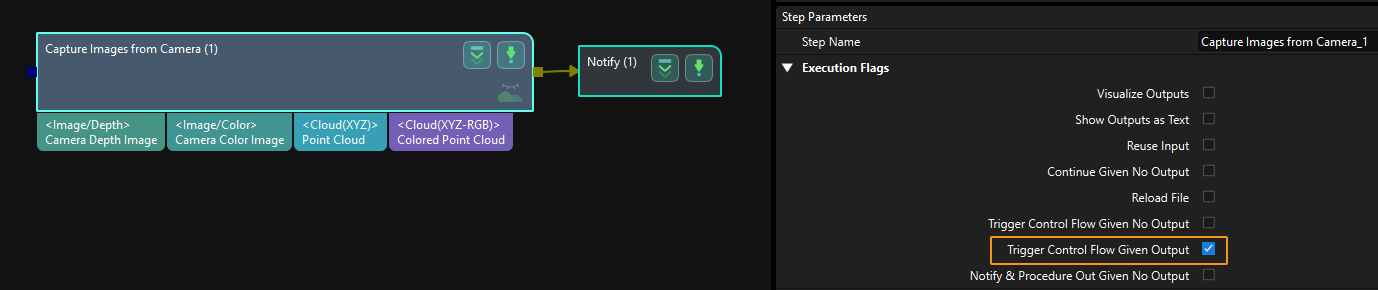
Ajoutez une étape « Notifier » dans le projet Mech-Vision, et connectez-la au port de flux de contrôle de l’étape « Capturer des images depuis la caméra ». Sélectionnez dans le panneau Paramètres de l’étape « Capturer des images depuis la caméra ».
-
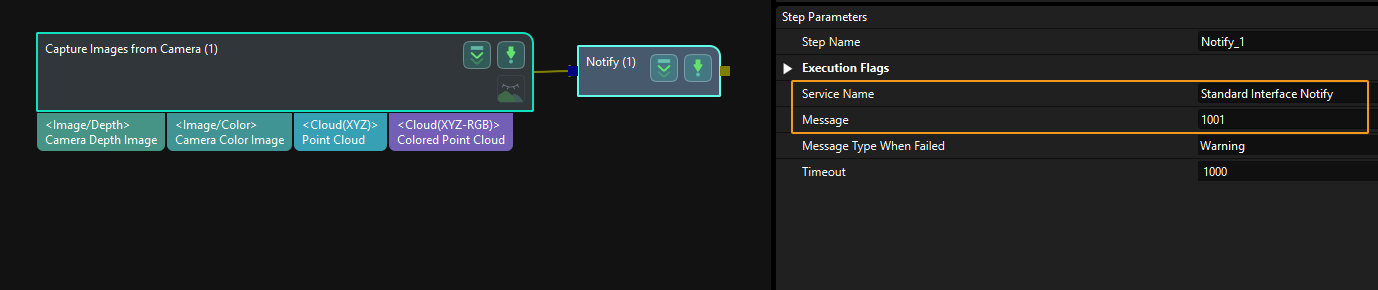
Définissez le nom du service de l’étape « Notifier » sur Standard Interface Notify, et le message sur 1001. Veuillez noter que la valeur 1001 ne doit pas être modifiée.
-
Après l’exécution du projet Mech-Vision, un signal Exposure_Complete sera envoyé lorsque la caméra aura terminé l’exposition. Après réception du signal Exposure_Complete, veuillez le réinitialiser en utilisant Reset_Exposure. Si le signal de réinitialisation n’est pas reçu dans les 10 secondes, un message d’erreur s’affichera: * délai d’attente du signal de confirmation des données*.