Configuration de la communication Master-Control
Ce guide explique comment configurer la communication Master-Control avec un robot NACHI.
Préparation
Configurer la connexion réseau
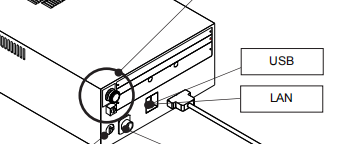
Connecter le matériel
Branchez le câble Ethernet sur le port LAN du contrôleur du robot pour le connecter à l’IPC.
Modifier le niveau de protection
-
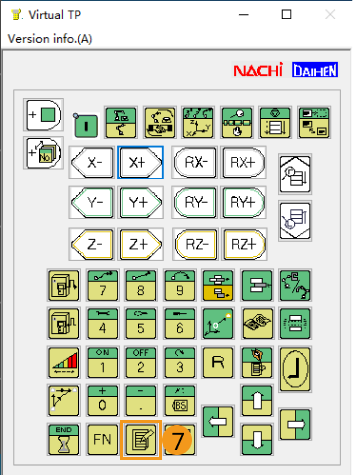
Ouvrez le boîtier d’apprentissage et appuyez sur la touche réinitialiser
 , comme illustré ci-dessous.
, comme illustré ci-dessous.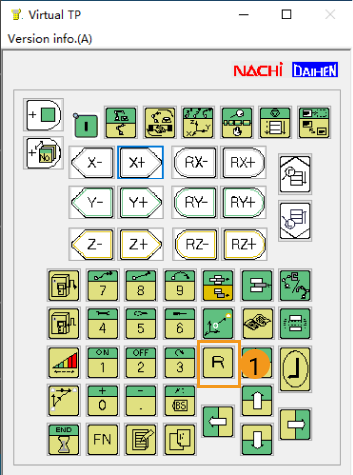
-
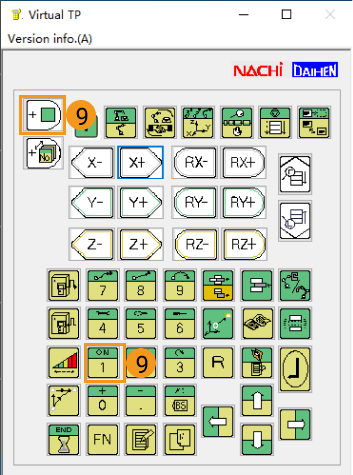
Saisissez 314 dans la case comme ci-dessous, puis appuyez sur la touche Entrée
 sur le boîtier d’apprentissage.
sur le boîtier d’apprentissage.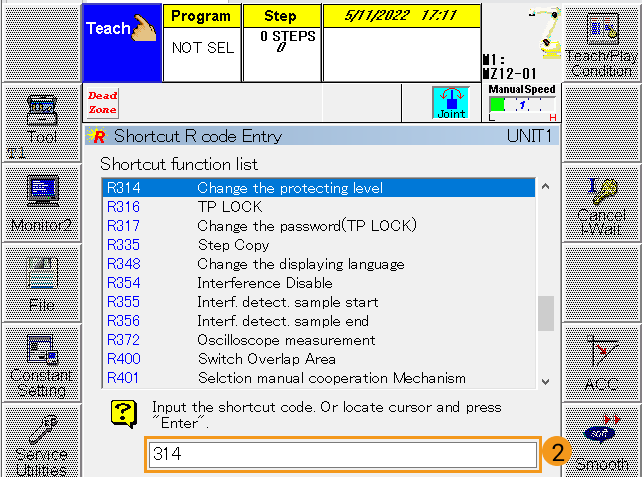
-
Entrez le mot de passe par défaut 12345 dans la case, puis appuyez sur la touche Entrée
sur le boîtier d’apprentissage pour passer au niveau SPÉCIALISTE.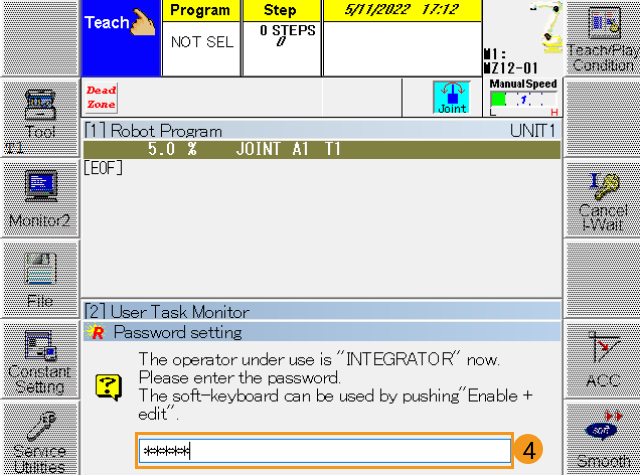
-
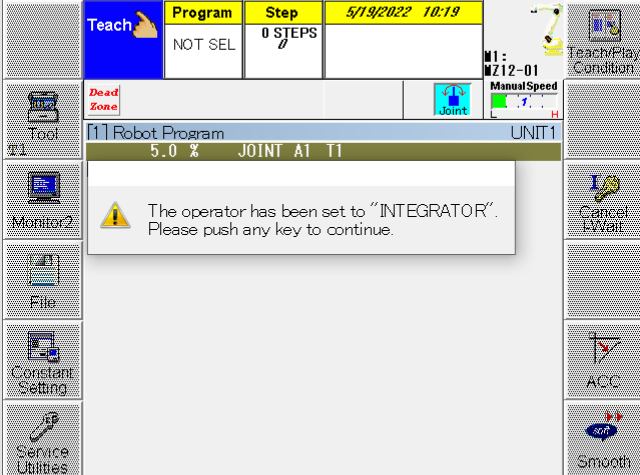
Une fenêtre contextuelle comme ci-dessous indique que vous avez modifié avec succès le niveau de protection et que toutes les fonctions sont désormais utilisables.
Définir l’adresse IP
-
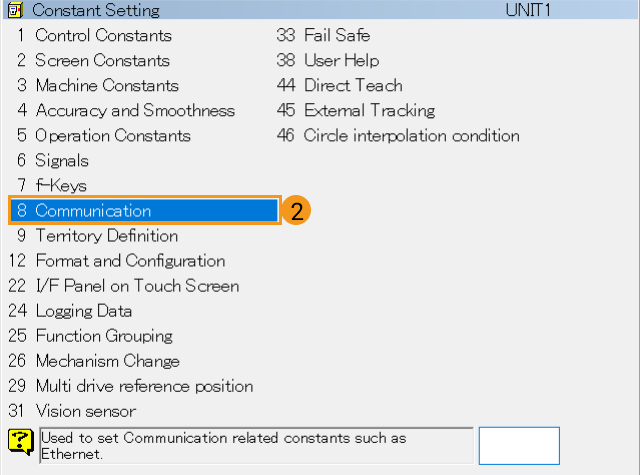
Accédez à pour configurer les Paramètres TCP/IP.
-
Sur l’interface des Paramètres TCP/IP, saisissez l’adresse IP du robot dans la case Adresse IP.
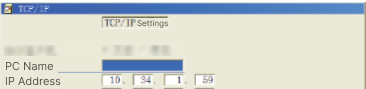
L’IP du robot doit être sur le même sous-réseau que l’IPC. Si vous devez définir une IP statique, veuillez contacter l’administrateur réseau.
Charger les fichiers du programme sur le robot
Préparer les fichiers du programme
Accédez à Communication Component/Robot_Server/Robot_FullControl/nachi depuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. Copiez le dossier nachi (contenant les fichiers du programme Master-Control) et collez-le sur une clé USB.
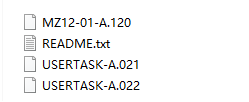
| Veuillez renommer le fichier MZ12-01-A.120 en fonction du nom du modèle réel du robot. Par exemple, lors du chargement du fichier sur le robot SRA166-1, renommez le fichier en SRA166-1-A.120, puis copiez-le et collez-le sur votre clé USB. |
Charger les fichiers sur le robot
-
Insérez la clé USB dans le port USB à l’arrière du boîtier d’apprentissage, comme illustré ci-dessous.

-
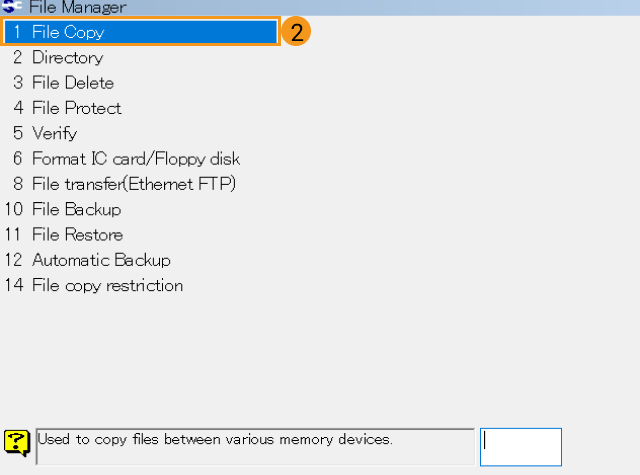
Sur le boîtier d’apprentissage, allez à .
-
Device (src) est le dossier de la clé USB. Sélectionnez le dossier où sont stockés les fichiers du programme sous Device (src) et le dossier PROGRAMME sous Device (dest). Dans la colonne Programme, cliquez sur Sélectionner tous les fichiers.
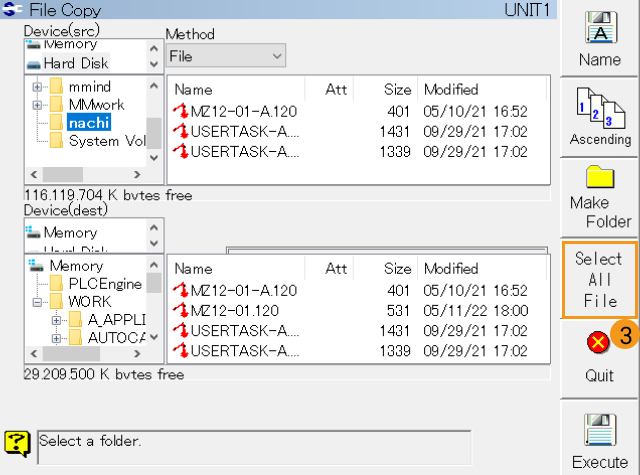
Remarque: -
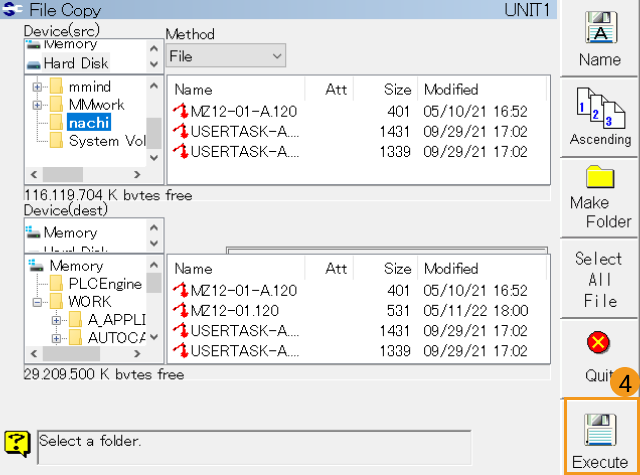
Le boîtier d’apprentissage est un écran tactile. Vous pouvez toucher l’écran directement pour effectuer des opérations.Appuyez sur Exécuter pour importer les fichiers.
-
Si les messages suivants apparaissent à l’écran, les fichiers du programme ont été chargés avec succès.
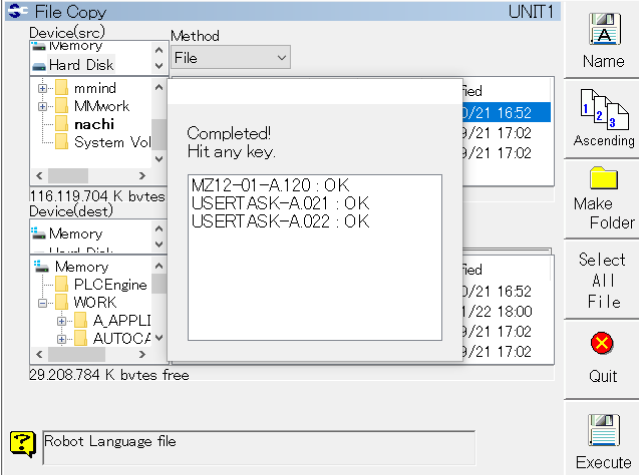
Veuillez redémarrer le robot après avoir quitté le programme.
Convertir les fichiers du programme
-
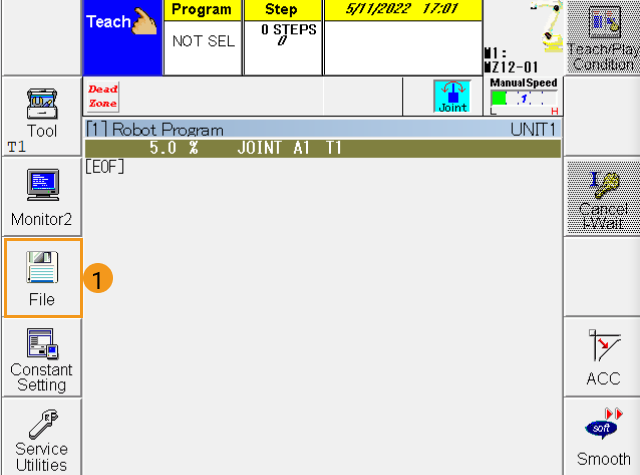
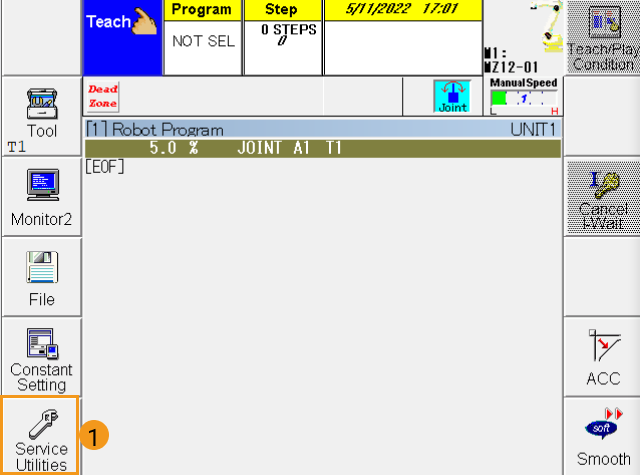
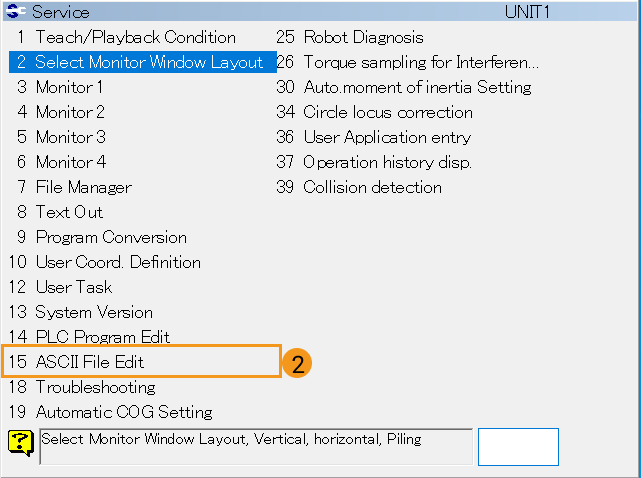
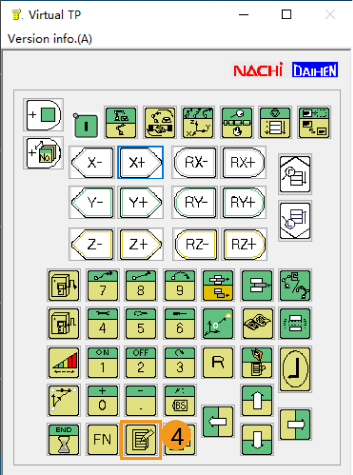
Revenez à l’interface principale, et appuyez sur pour éditer les fichiers ASCII.
-
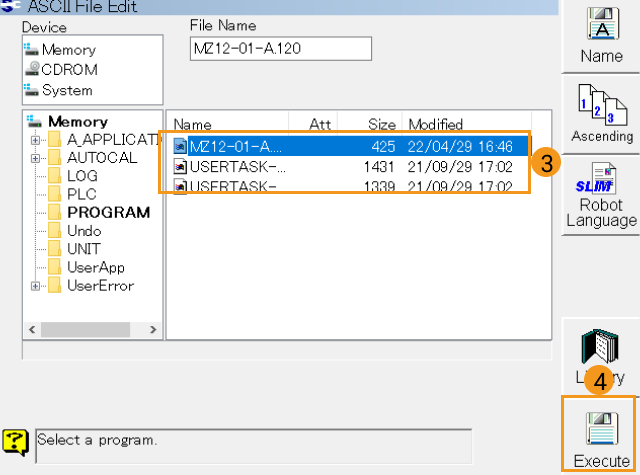
Sélectionnez le fichier et appuyez sur Exécuter. Veuillez effectuer la même opération sur les trois fichiers successivement, et vous ne pouvez démarrer l’exécution qu’après la fin de l’exécution précédente.
-
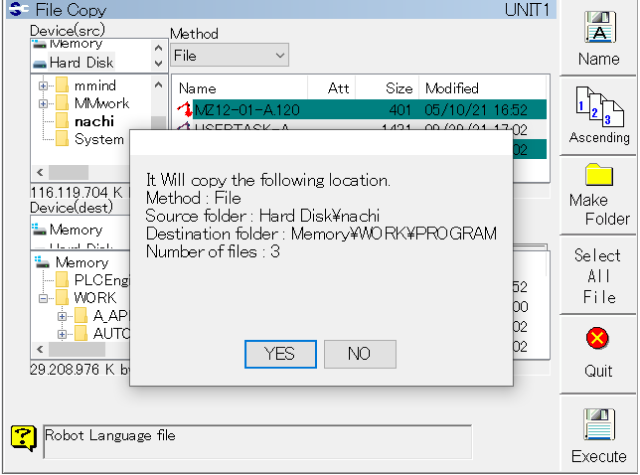
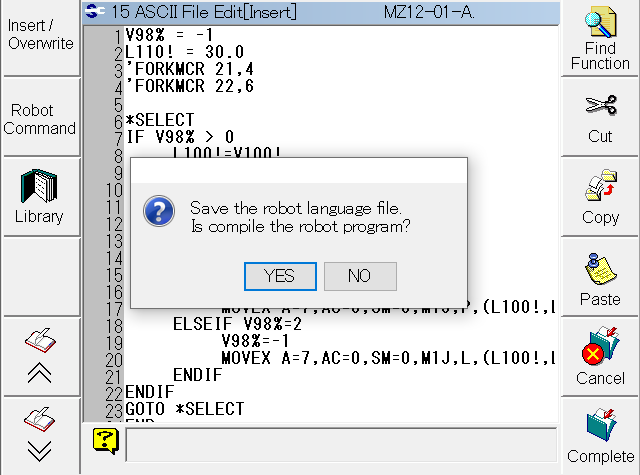
Après avoir appuyé sur Exécuter, une fenêtre comme ci-dessous apparaîtra, puis sélectionnez Oui.
-
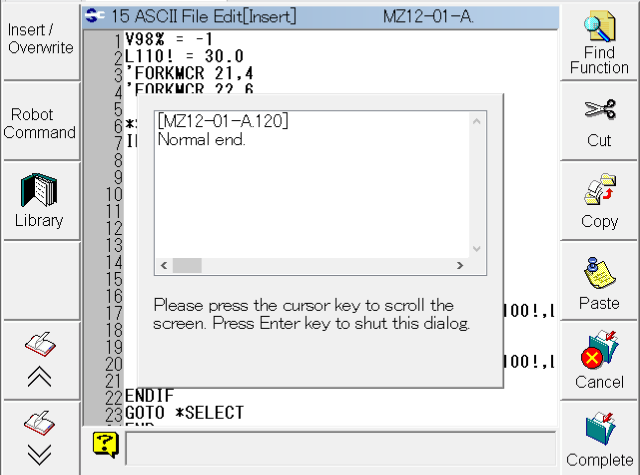
Après conversion du fichier du programme en langage robot, un message comme ci-dessous apparaîtra.
Tester la communication Master-Control
Exécuter le programme
-
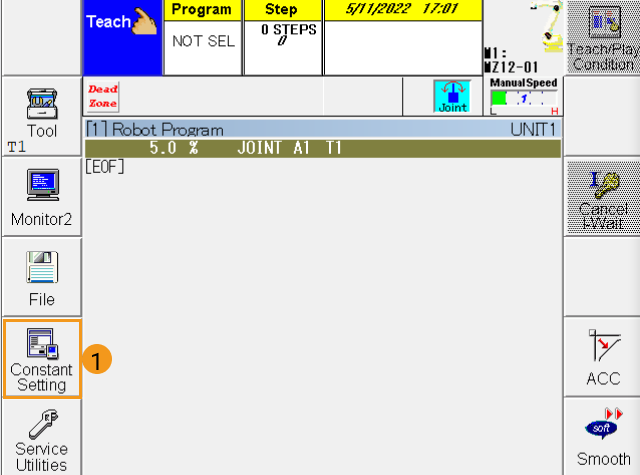
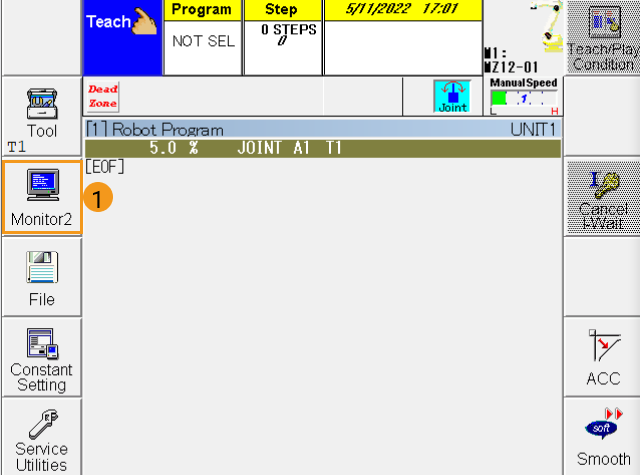
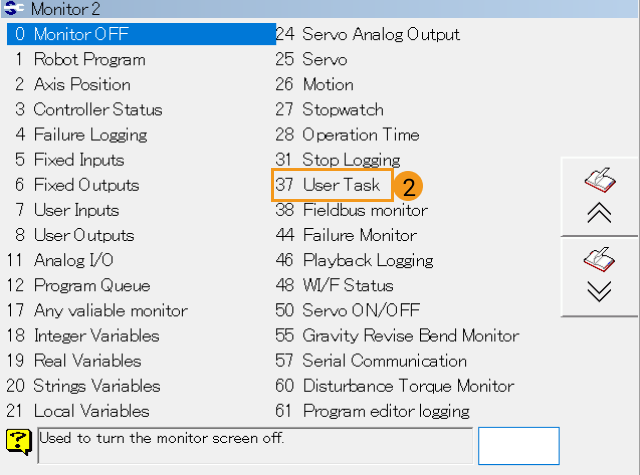
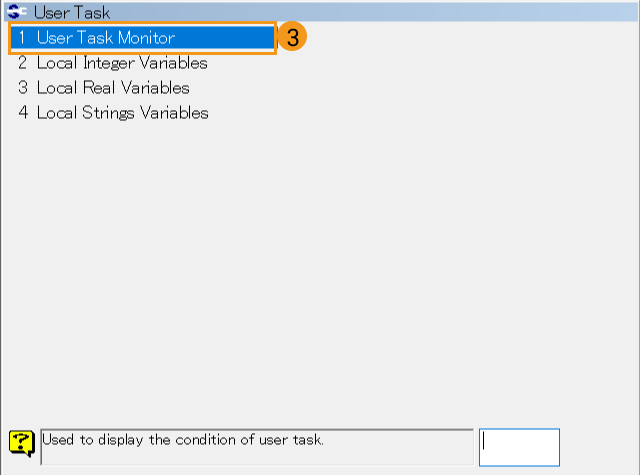
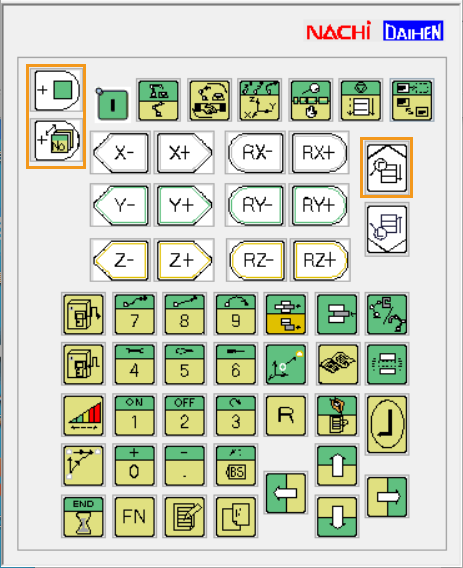
Revenez à l’interface principale, et allez à .
-
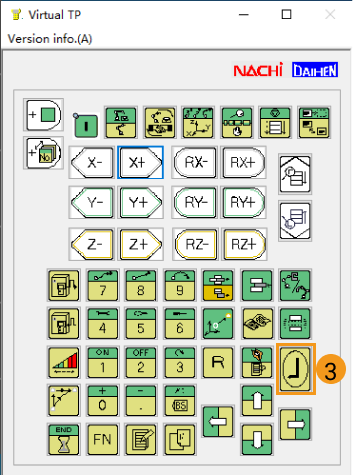
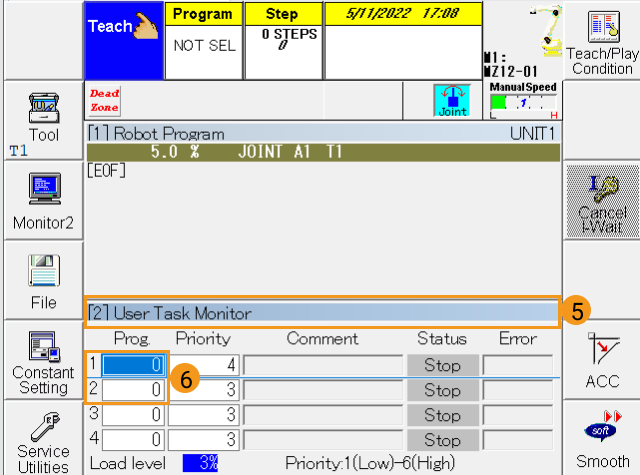
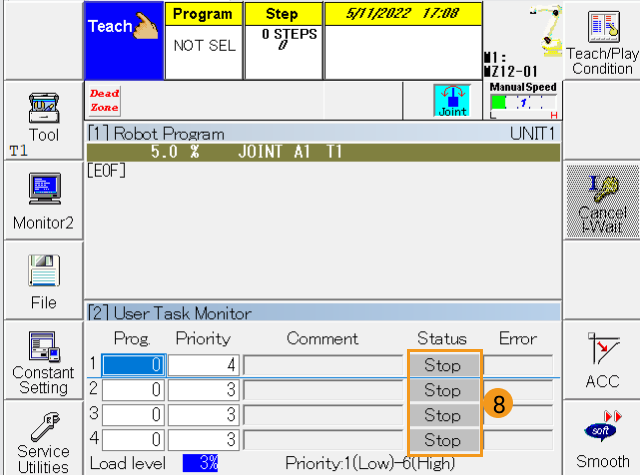
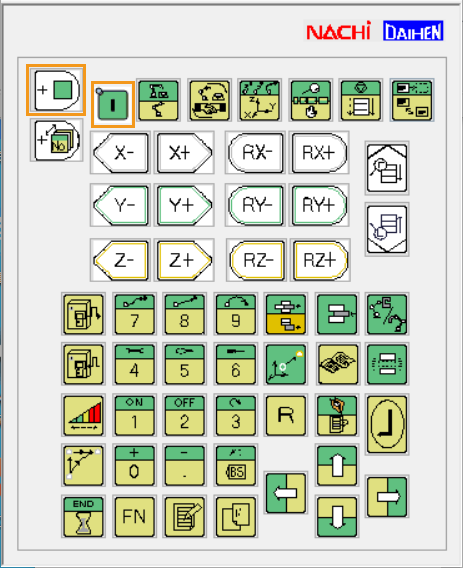
Vous pouvez maintenant voir le Moniteur de tâche utilisateur comme indiqué en ④ ci-dessous. Appuyez sur la touche modifier
 sur le boîtier d’apprentissage, puis la ligne Moniteur de tâche utilisateur (⑥) devient orange, indiquant qu’elle est désormais modifiable. Saisissez 21 sur la première ligne dans la colonne Programme, et saisissez 22 sur la deuxième ligne. Ensuite, appuyez sur la touche modifier .
sur le boîtier d’apprentissage, puis la ligne Moniteur de tâche utilisateur (⑥) devient orange, indiquant qu’elle est désormais modifiable. Saisissez 21 sur la première ligne dans la colonne Programme, et saisissez 22 sur la deuxième ligne. Ensuite, appuyez sur la touche modifier .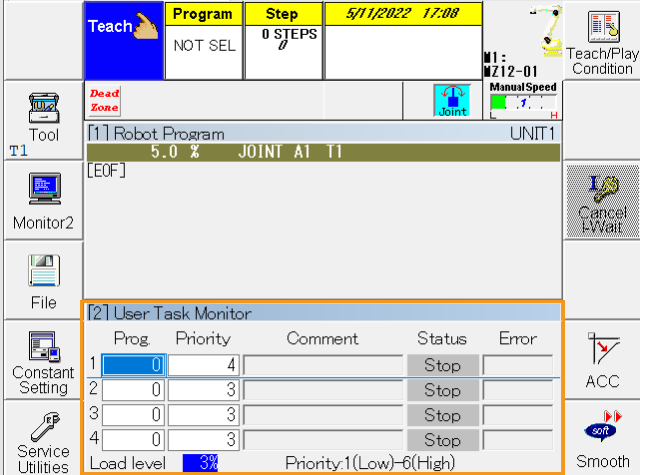
Si le robot ne peut pas se déplacer de manière fluide, veuillez modifier le niveau de priorité du programme 21 de 4 à 5. -
Sélectionnez la colonne Statut, et appuyez simultanément sur les touches ENABLE
 et 1
et 1  .
.
-
Allez à , saisissez 120 dans la case, puis appuyez sur la touche Entrée
. Le programme désigné apparaîtra dans le panneau Programme et dans le Moniteur de tâche utilisateur.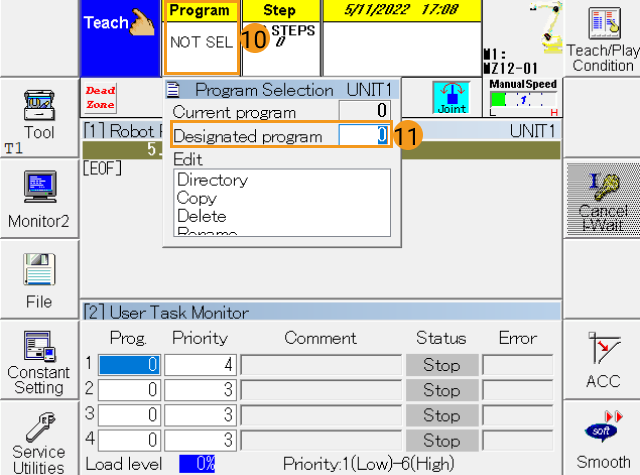
Démarrer le robot
Il existe deux types de contrôleurs pour les robots NACHI : le contrôleur FD et le contrôleur CFD.
-
Si vous utilisez un contrôleur FD, suivez les étapes ci-dessous.
-
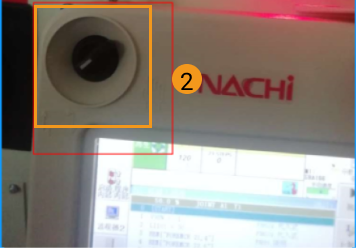
Tournez la clé sur le contrôleur et mettez-la sur la position ①.
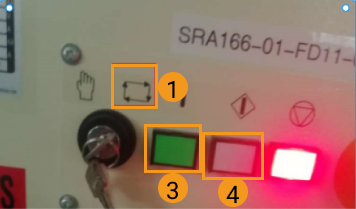
-
Tournez le sélecteur sur la position indiquée ci-dessous. Appuyez successivement sur le bouton vert puis sur le bouton blanc pour démarrer le robot.
-
-
Si vous utilisez un contrôleur CFD, suivez les étapes ci-dessous.
-
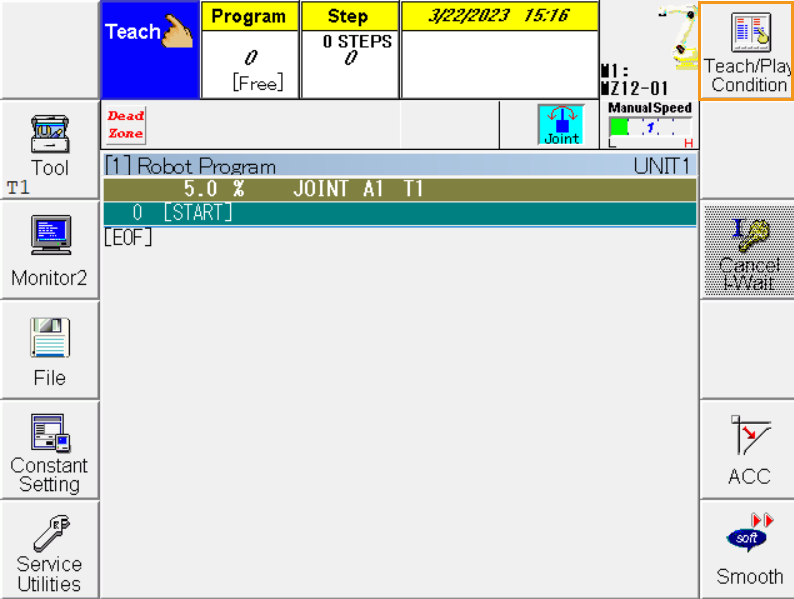
Tournez le sélecteur sur la position indiquée ci-dessous.
-
Appuyez sur Condition Enseigner/Lecture dans le coin supérieur droit.
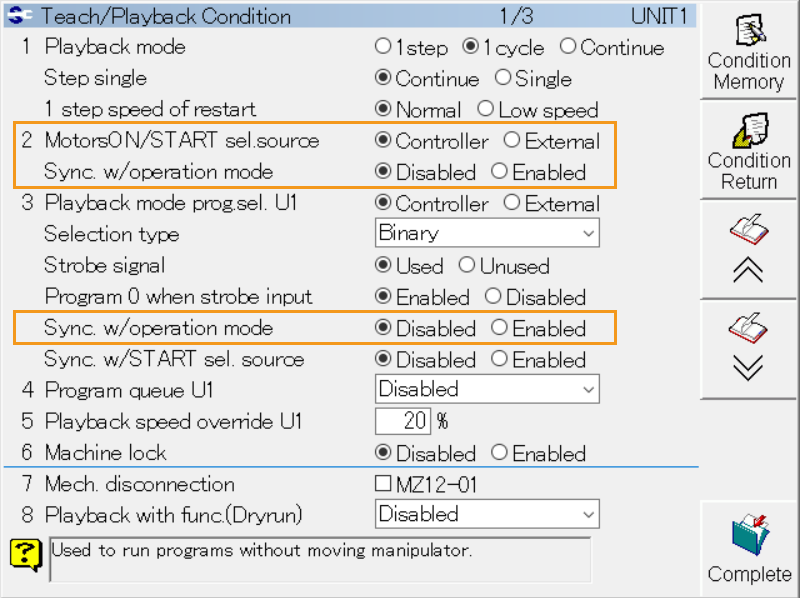
-
Définissez MotorsON/START sel.source sur Contrôleur et Sync. w/operation mode sur Désactivé.
-
Appuyez simultanément sur les touches ENABLE et I, et l’indicateur de la touche I s’allumera.
-
Appuyez simultanément sur les touches ENABLE, SHIFT et GO. Si la ligne bleue se déplace dans la fenêtre du programme, celui-ci est démarré et en cours d’exécution.
-
Créer un projet Mech-Viz
-
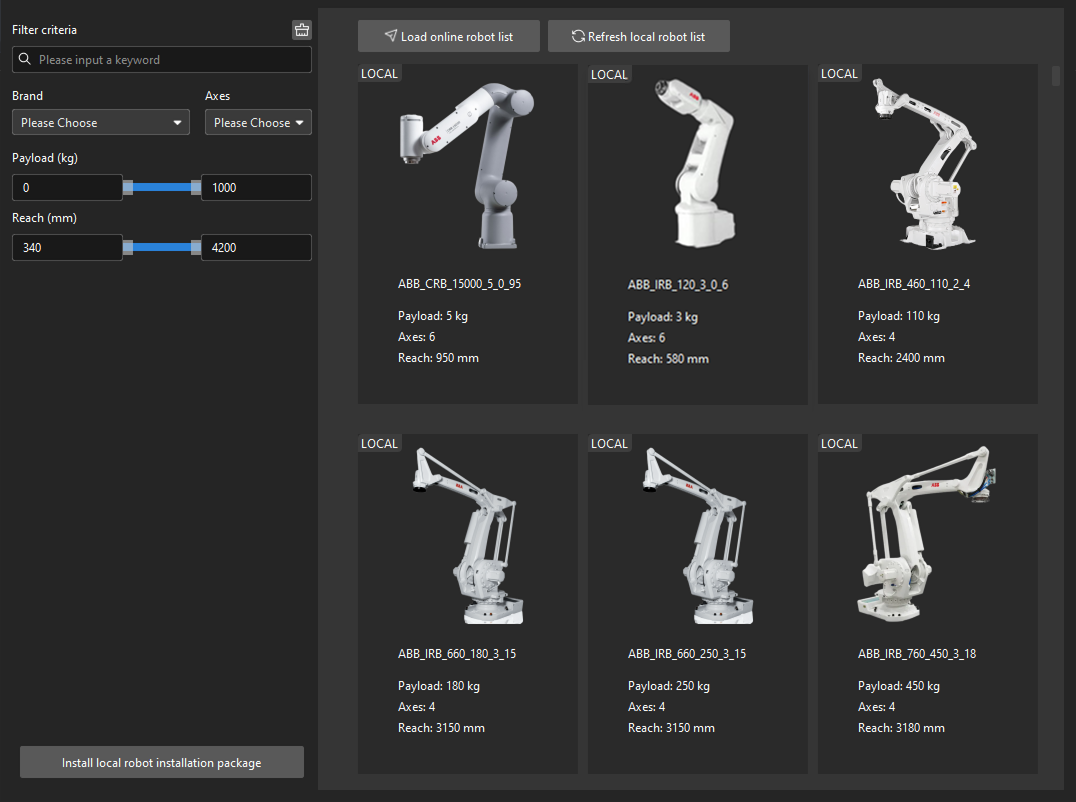
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
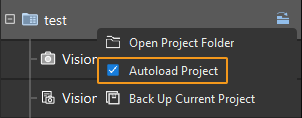
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
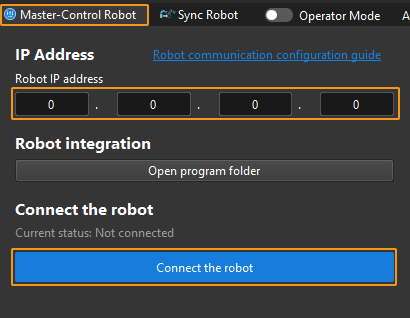
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
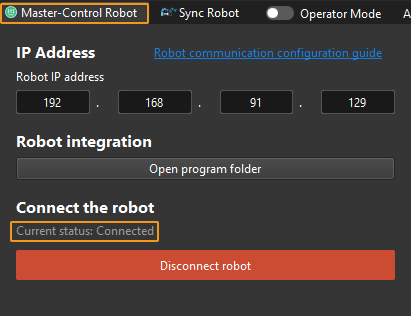
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
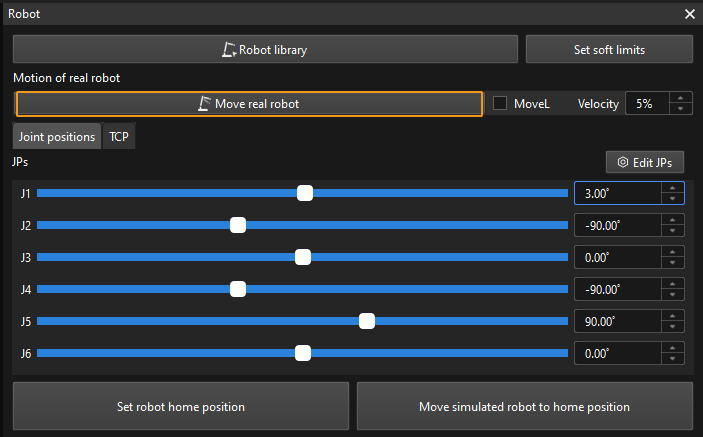
Déplacer le robot
-
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
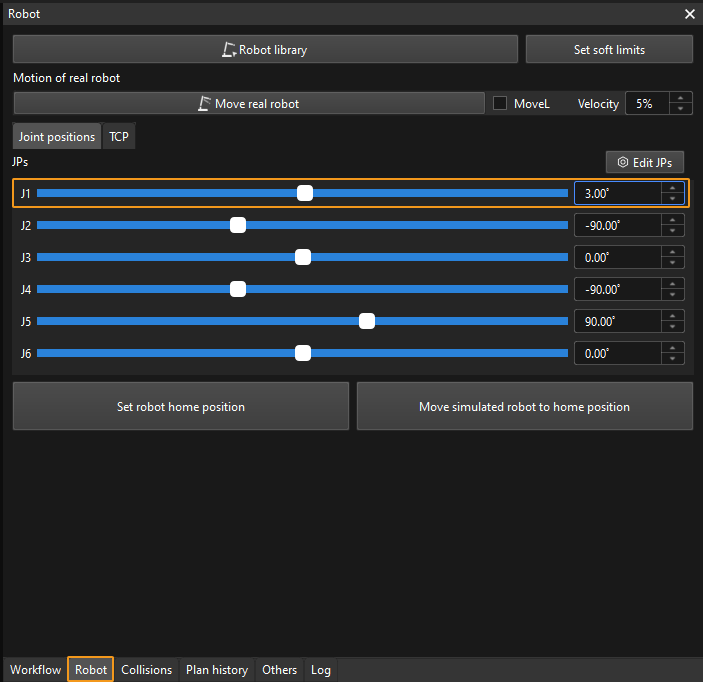
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !