Configurer la communication Standard Interface avec SIASUN GCR
Ce guide explique comment charger le programme Standard Interface sur un robot SIASUN GCR et configurer la communication Standard Interface.
Préparation
Avant de charger les fichiers du programme Standard Interface, vous devez vérifier les versions matérielles et logicielles, établir la connexion réseau entre le robot et l’IPC, activer le service d’interface dans Mech-Vision, et copier les fichiers du programme.
Vérifier les versions matérielle et logicielle
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
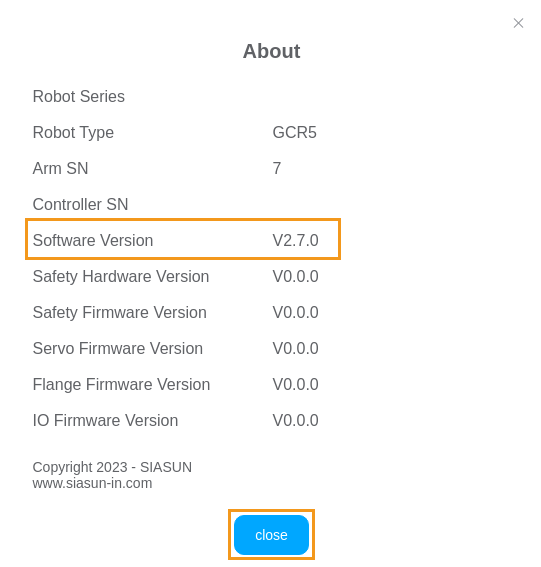
Modèle du robot: GCR5
-
Version du contrôleur: 2.7.0
Instructions
-
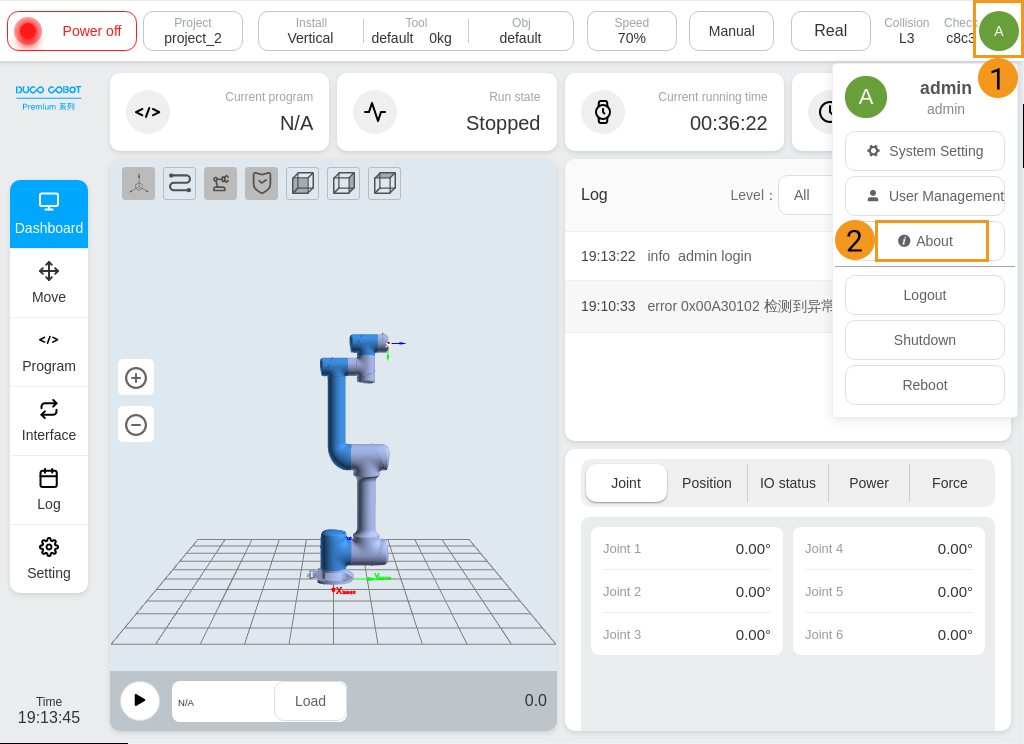
Cliquez sur l’icône de profil en haut à droite de la console d’enseignement, et sélectionnez À propos dans le menu déroulant.
-
Version du logiciel est la version du contrôleur.
Configurer la connexion réseau
-
Branchez l’autre extrémité du câble Ethernet de l’IPC sur le port Ethernet du contrôleur du robot.
-
Vérifiez l’adresse IP du robot et assurez-vous qu’elle est sur le même sous-réseau que l’IPC.
Instructions
-
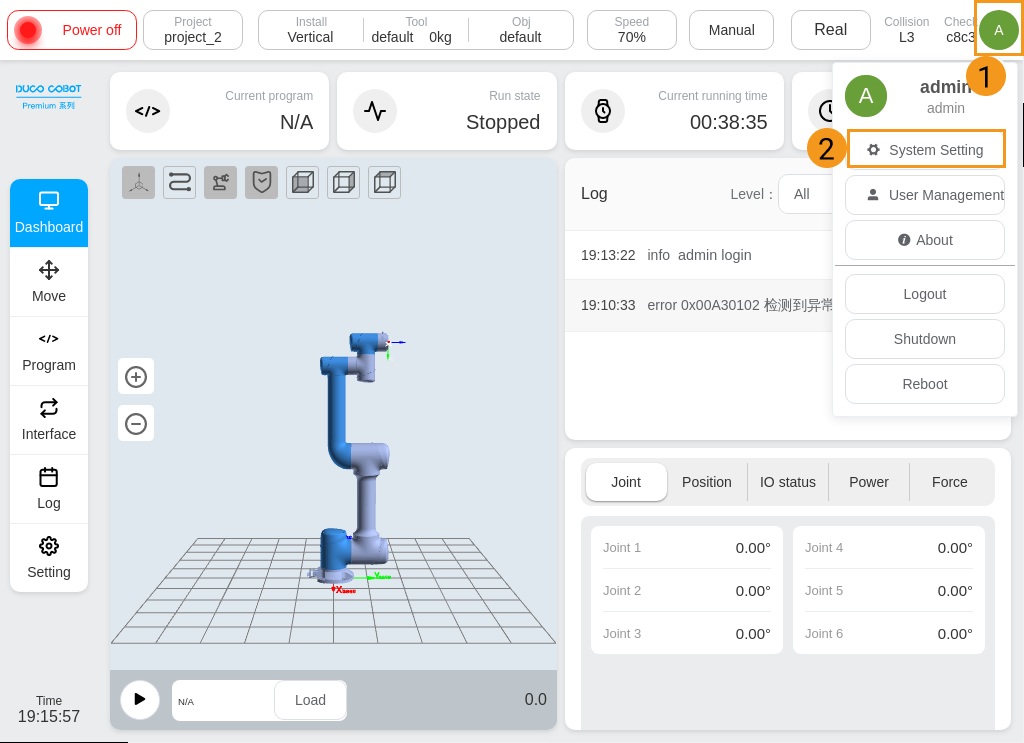
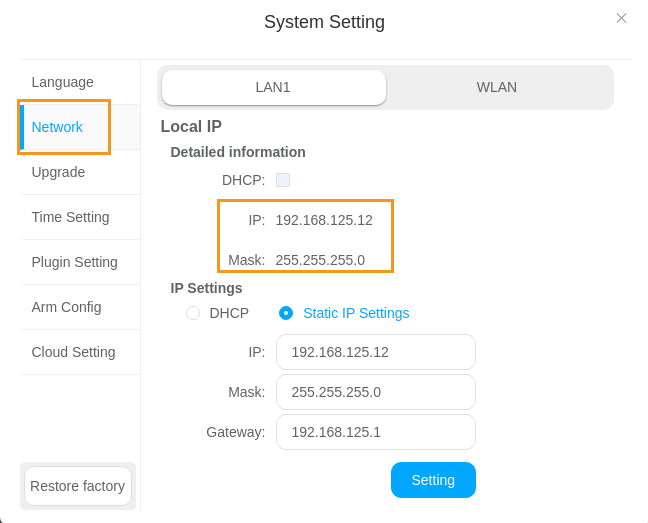
Cliquez sur l’icône de profil utilisateur en haut à droite de la console d’enseignement. Cliquez sur Paramètres système dans le menu déroulant.
-
Cliquez sur Réseau dans la fenêtre contextuelle « Paramètres système », et vérifiez l’adresse IP et le masque de sous-réseau du robot dans la zone « IP locale ».
-
-
Si l’adresse IP du robot et celle de l’IPC sont dans des sous-réseaux différents, veuillez modifier l’adresse IP de l’IPC.
Configurer la configuration de communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
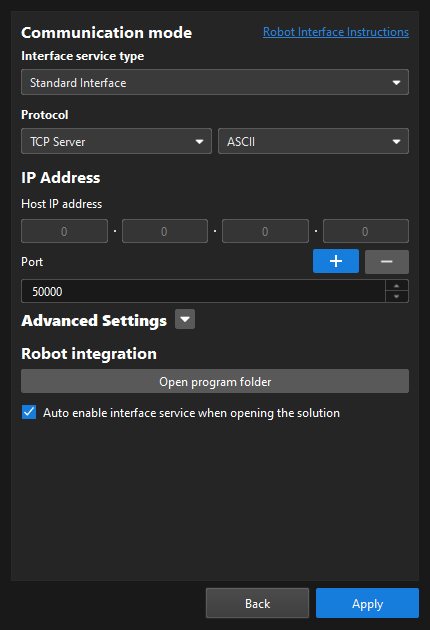
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Préparer les fichiers du programme
-
Branchez la clé USB dans le port USB de l’IPC.
-
Sur l’IPC, vous pouvez trouver les trois fichiers suivants dans le dossier du programme ouvert (le dossier
SIASUN).Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/SIASUNdu répertoire d’installation de Mech-Vision et Mech-Viz.-
mm.pro
-
mm.program
-
mm_siasun.script
-
-
Vous pouvez choisir de charger un projet ou de charger des programmes lors de la configuration de la communication Standard Interface pour un robot SIASUN.
Charger un projet signifie charger dans le robot l’ensemble du projet qui contient le programme d’étalonnage, le programme de reconnaissance visuelle, le programme de planification de trajectoire, etc.
Charger des programmes signifie charger dans un projet existant les programmes spécifiques qui permettent au robot d’établir la communication avec le système de vision de Mech-Mind et d’accéder aux données et de les traiter.
-
Si vous devez charger le projet complet, copiez les fichiers suivants dans le répertoire racine de la clé USB:
-
mm.pro: le fichier du projet complet
-
-
Si vous devez charger des programmes individuels, copiez les fichiers suivants dans le répertoire racine de la clé USB:
-
mm.program: programme d’exemple de la communication Standard Interface et programme d’étalonnage
-
mm_siasun.script: script robot pour la communication socket et le traitement des données
-
-
Charger les fichiers du programme sur le robot
Vous pouvez choisir de charger un projet ou de charger des programmes lors de la configuration de la communication Standard Interface pour un robot SIASUN.
Reportez-vous à la section Charger le projet si vous devez charger un projet complet sur le robot; et reportez-vous à la section Charger le projet si vous devez importer la fonction de communication Standard Interface dans un projet existant.
Charger le projet
-
Branchez la clé USB dans le port USB à l’arrière de la console d’enseignement.
-
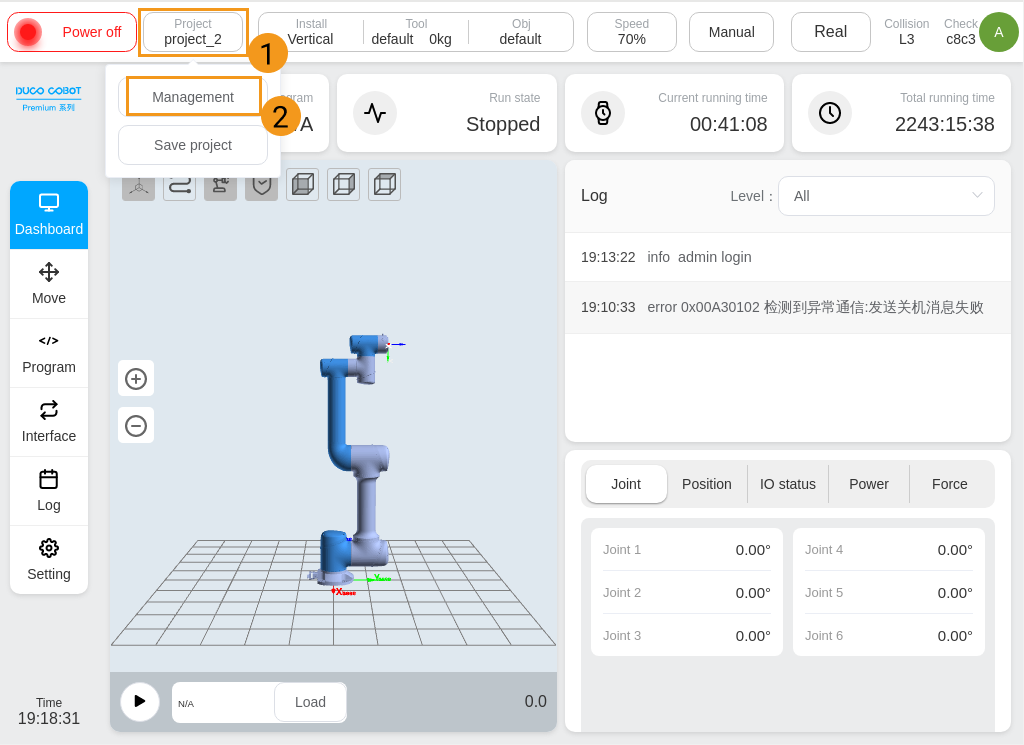
Cliquez sur Projet en haut à gauche de la console d’enseignement. Sélectionnez Gestion dans le menu déroulant.
-
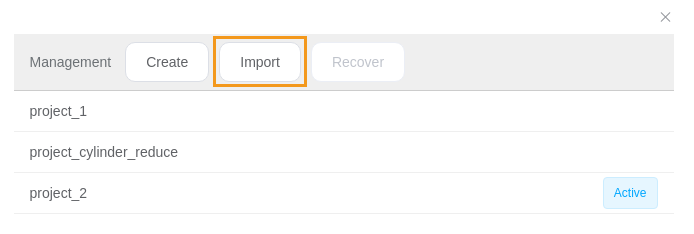
Sélectionnez Importer dans la fenêtre contextuelle « Gestion ».
-
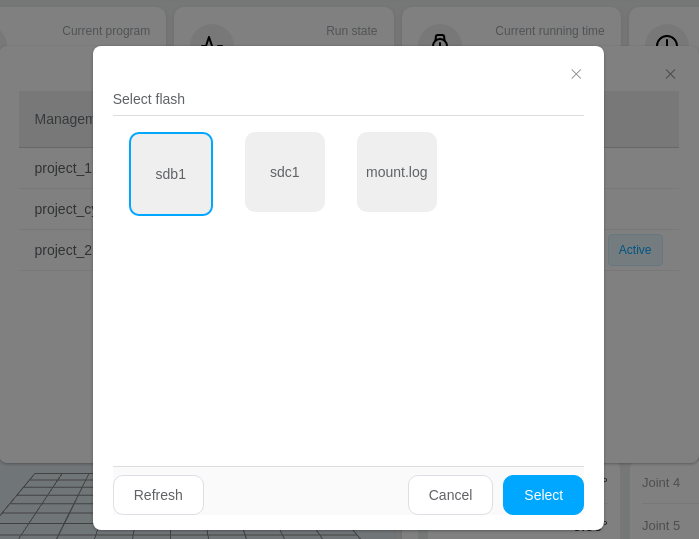
Sélectionnez la clé USB que vous avez branchée sur la console d’enseignement dans la fenêtre contextuelle « Sélectionner le support », et cliquez sur Sélectionner.
-
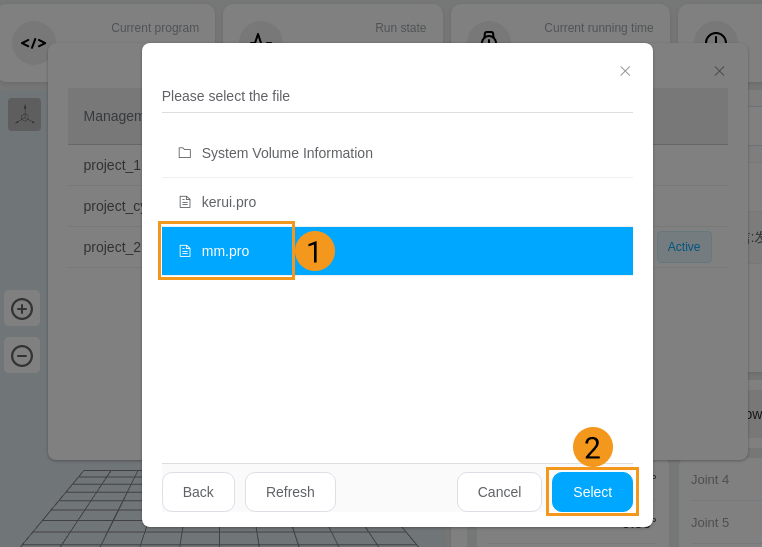
Sélectionnez mm.pro dans la fenêtre contextuelle « Veuillez sélectionner le fichier », puis cliquez sur Sélectionner. L’interface revient à la fenêtre « Gestion » et affiche « Importation réussie ».
-
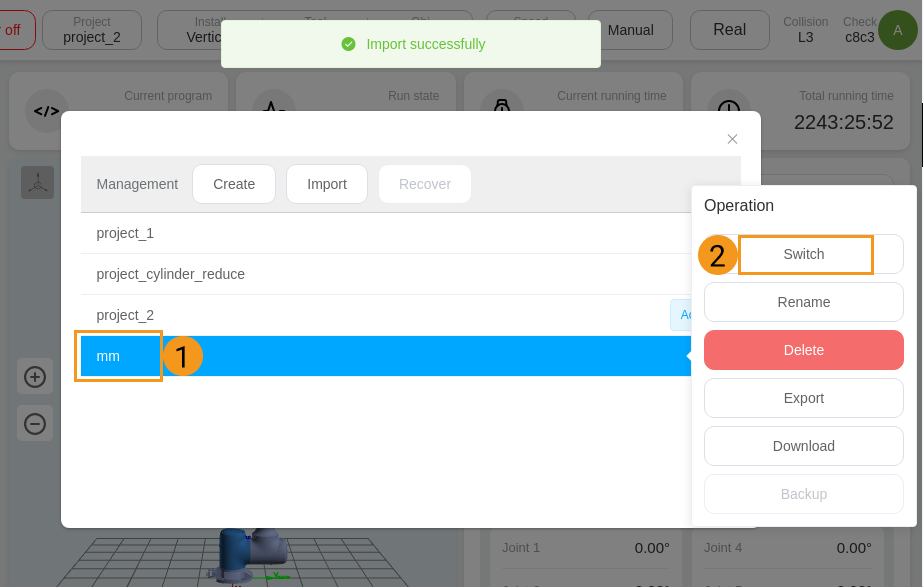
Cliquez sur le projet mm. Cliquez sur Basculer dans le menu d’opérations contextuel.
-
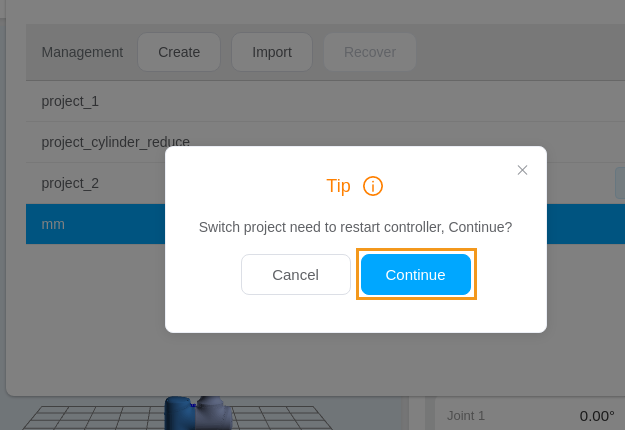
Cliquez sur Continuer dans la boîte de dialogue contextuelle pour redémarrer le contrôleur et terminer le chargement du projet.
Charger des programmes
-
Branchez la clé USB dans le port USB à l’arrière de la console d’enseignement.
-
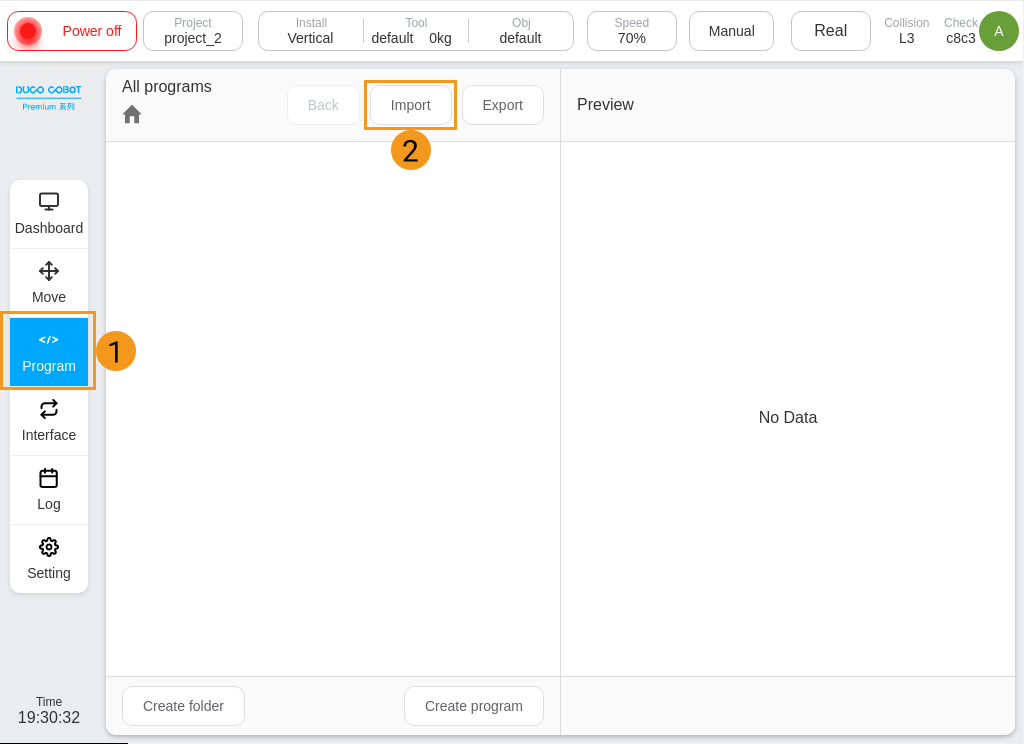
Cliquez sur Programme dans le panneau latéral gauche de la console d’enseignement. Cliquez sur Importer sur le panneau « Tous les programmes ».
-
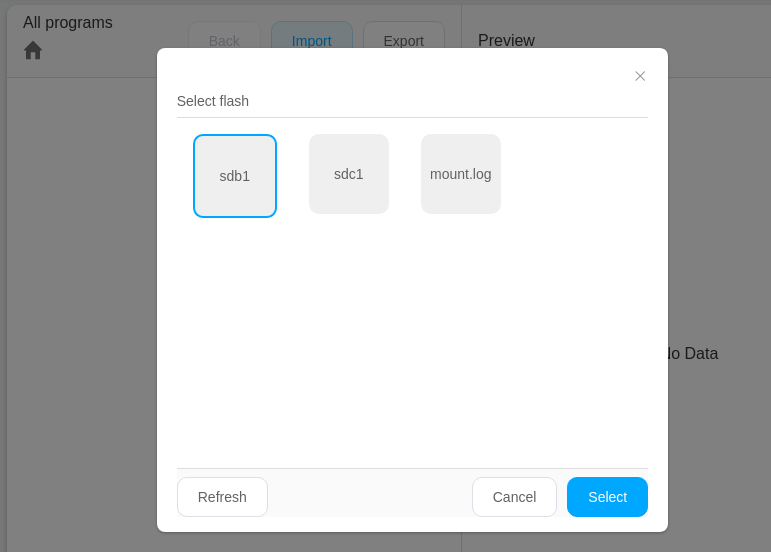
Sélectionnez la clé USB que vous avez branchée sur la console d’enseignement dans la fenêtre contextuelle « Sélectionner le support », et cliquez sur Sélectionner.
-
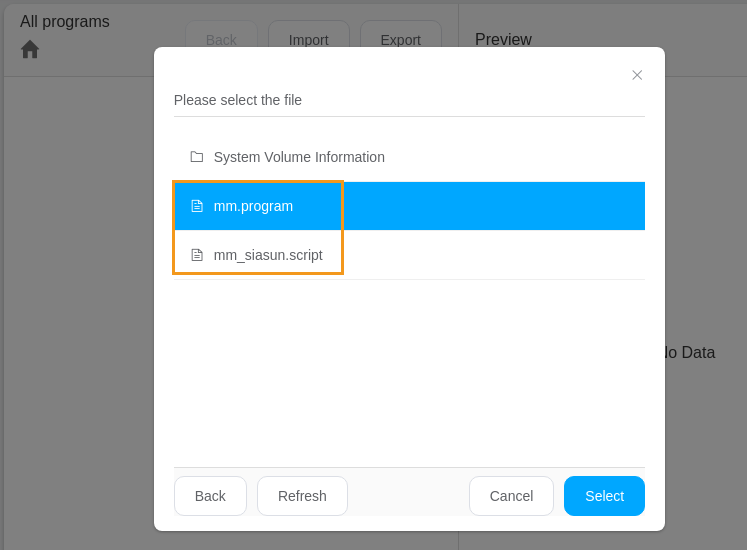
Sélectionnez mm.program dans la fenêtre contextuelle « Veuillez sélectionner le fichier », puis cliquez sur Sélectionner. L’interface affiche « Importation réussie » et revient à la page « Programme ».
-
Reportez-vous aux étapes 2~4 et importez le fichier mm_siasun.script.
-
Après avoir chargé les deux fichiers mentionnés ci-dessus, vous devez ajouter des variables globales manuellement. Cliquez sur Paramètres dans le panneau latéral gauche de la console d’enseignement. Cliquez sur sur le panneau d’opérations.
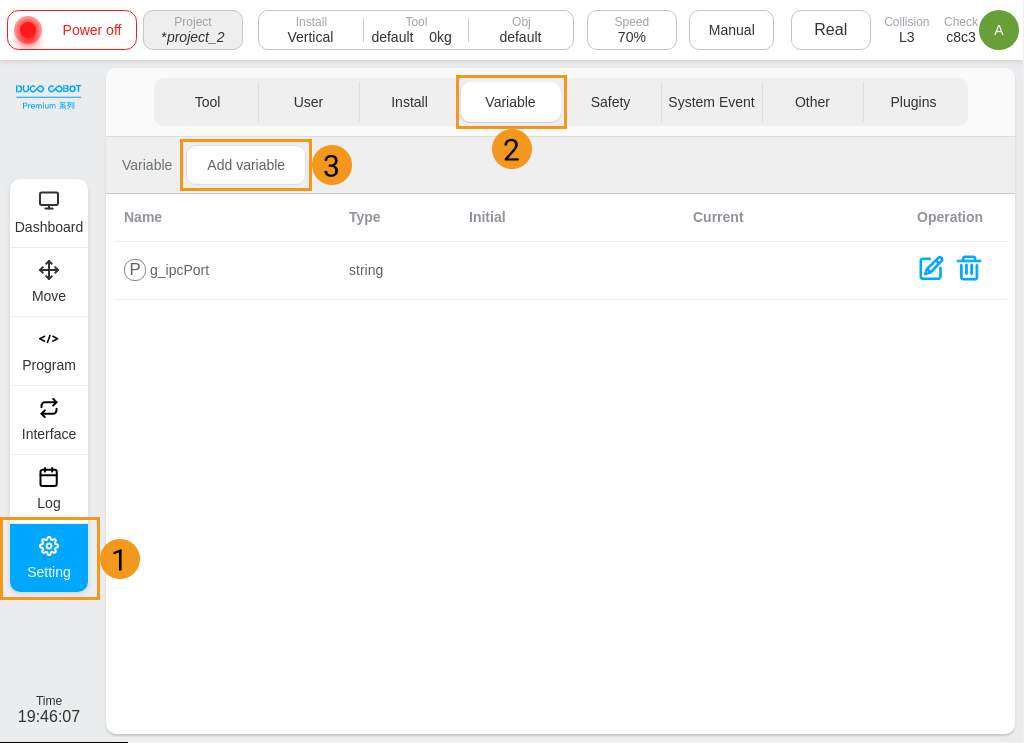
-
Saisissez Nom et Type pour la nouvelle variable dans la fenêtre contextuelle « Créer une variable », et sélectionnez Persistant.
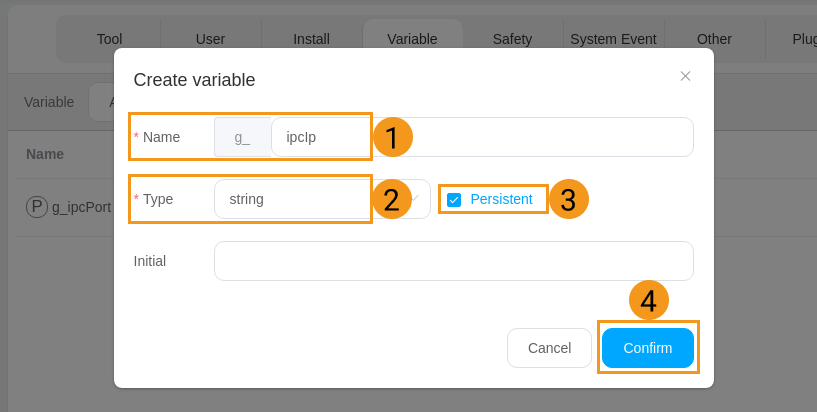
Les variables que vous devez créer sont répertoriées dans le tableau suivant.
-
Le nom de la variable est sensible à la casse.
-
« g_ » est déjà dans la zone de texte de la fenêtre « Créer une variable ». Ne le saisissez pas de nouveau.
Nom de la variable Type g_ipcIp
string
g_ipcPort
number
g_mmCmd
number
g_mmStatus
number
g_mmProjectId
number
g_mmExceptPose
number
g_mmRecipeId
number
g_mmPoseType
number
g_mmBranchId
number
g_mmBranchPort
number
g_mmIndexId
number
g_mmIndexPort
number
g_mmRecvList
num_list
g_mmTarget
num_list
g_mmNum
number
g_mmConfigId
number
g_mmBoxSize
string
g_mmPosSend
string
-
-
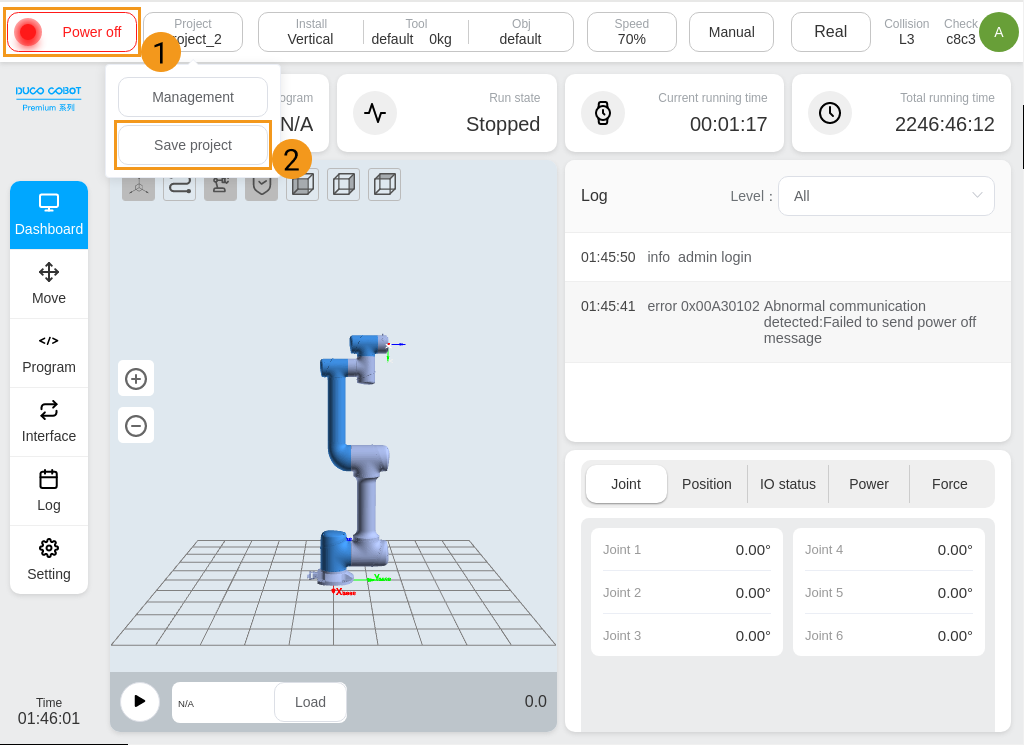
Cliquez sur Projet dans le coin supérieur gauche, puis cliquez sur Enregistrer le projet dans le menu déroulant.
Saisir les adresses IP de l’IPC
Après avoir chargé le projet ou les programmes, vous devez configurer l’adresse IP et le port de l’IPC sur la console d’enseignement, afin que le robot puisse communiquer avec l’IPC.
-
Cliquez sur Paramètres dans le panneau latéral gauche de la console d’enseignement, puis sélectionnez Variable. Trouvez g_ipcIp et cliquez sur l’icône d’édition
 à sa droite.
à sa droite.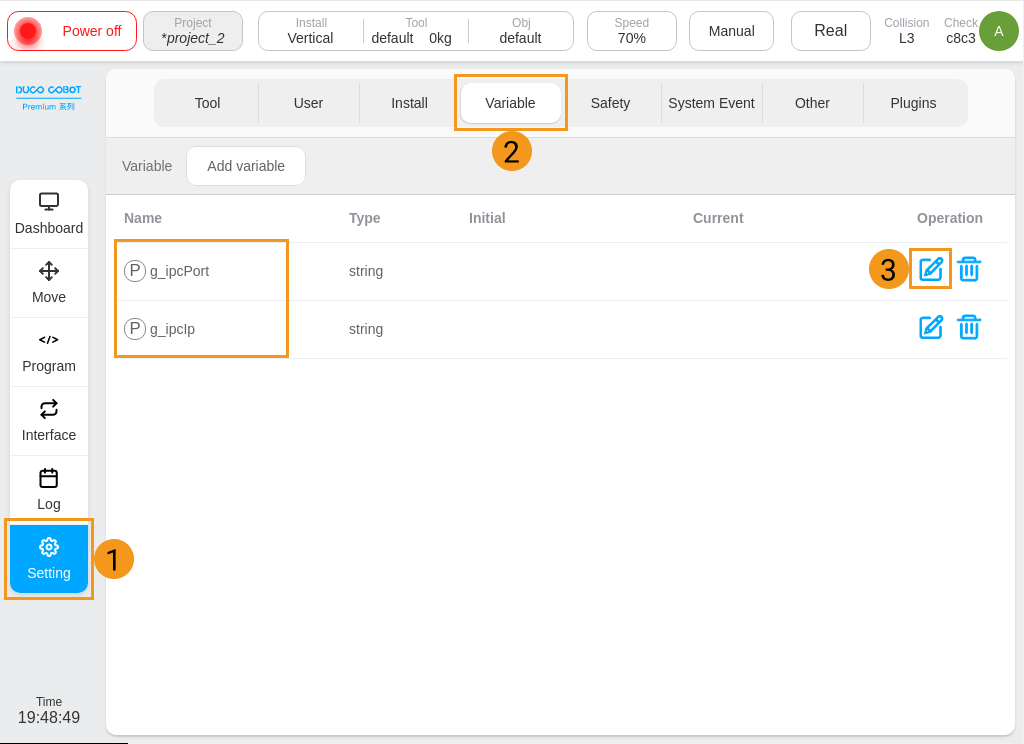
-
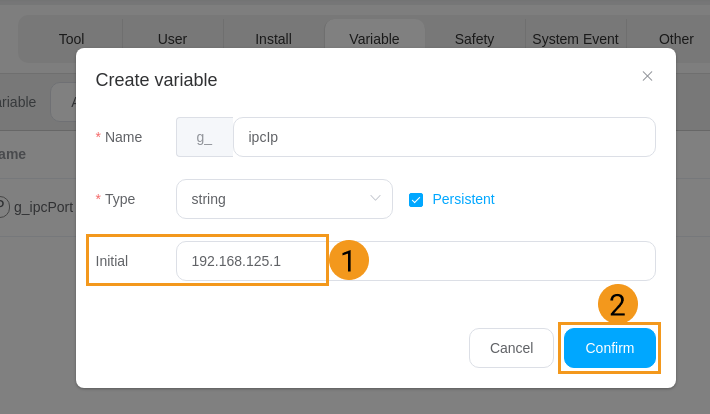
La fenêtre « Créer une variable » s’ouvre. Saisissez l’adresse IP de l’IPC dans la zone de texte Initial, puis cliquez sur Confirmer. Ce guide utilise 192.168.125.1 à titre d’exemple. Veuillez saisir l’adresse IP de l’IPC utilisé.
-
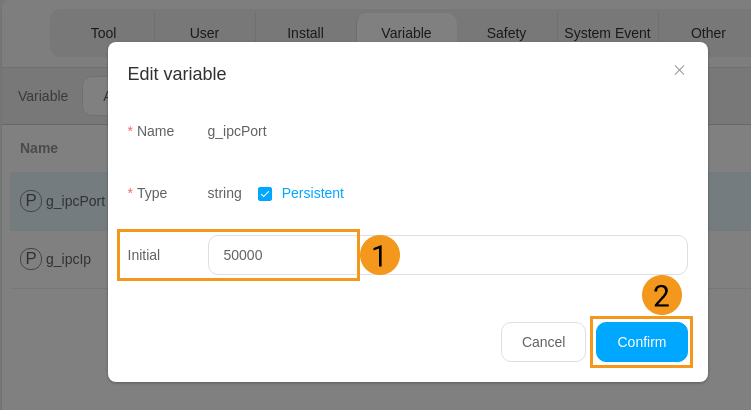
Trouvez g_ipcPort dans le panneau « Variable », et cliquez sur l’icône d’édition
à sa droite. -
La fenêtre « Créer une variable » s’ouvre. Saisissez le numéro de port de l’IPC dans la zone de texte Initial. Ce guide utilise 50000 à titre d’exemple. Veuillez saisir l’adresse IP de l’IPC utilisé. Ensuite, cliquez sur Confirmer.
Tester la communication Standard Interface
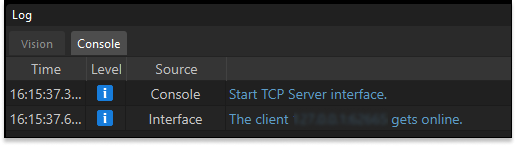
Avant de tester la communication Standard Interface entre le robot et le système de vision, assurez-vous que le service d’interface est démarré. Ensuite, exécutez un programme de test sur la console d’enseignement pour tester la communication Standard Interface.
-
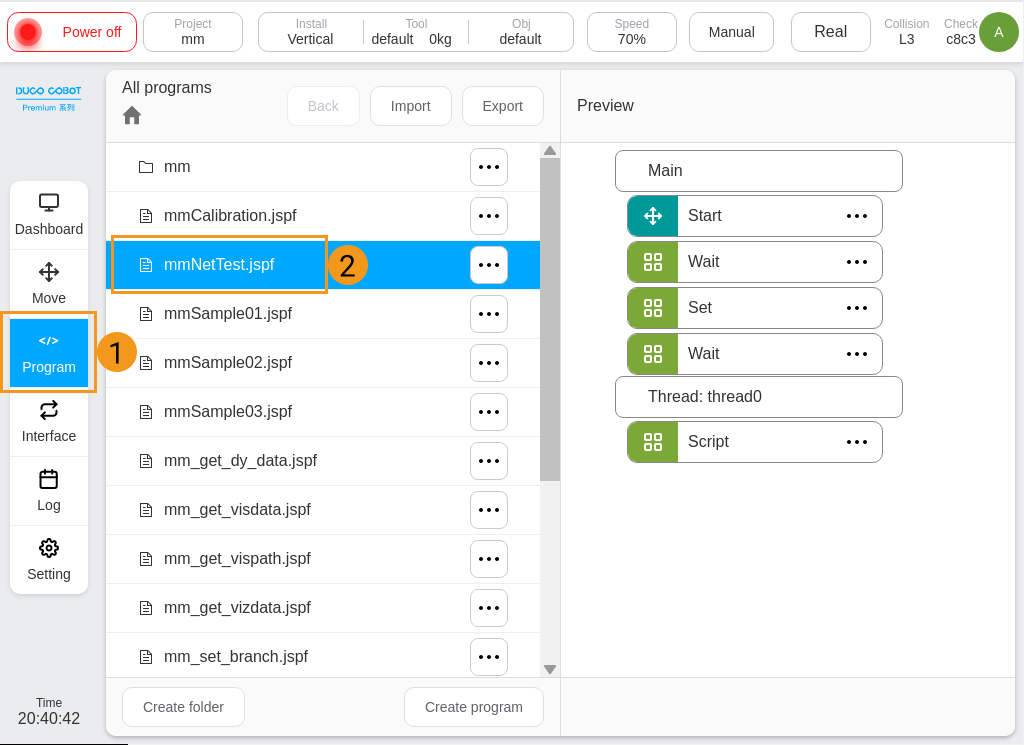
Cliquez sur Programme dans le panneau latéral gauche. Recherchez et double-cliquez sur le programme mmNetTest.jspf dans le panneau « Tous les programmes ».
-
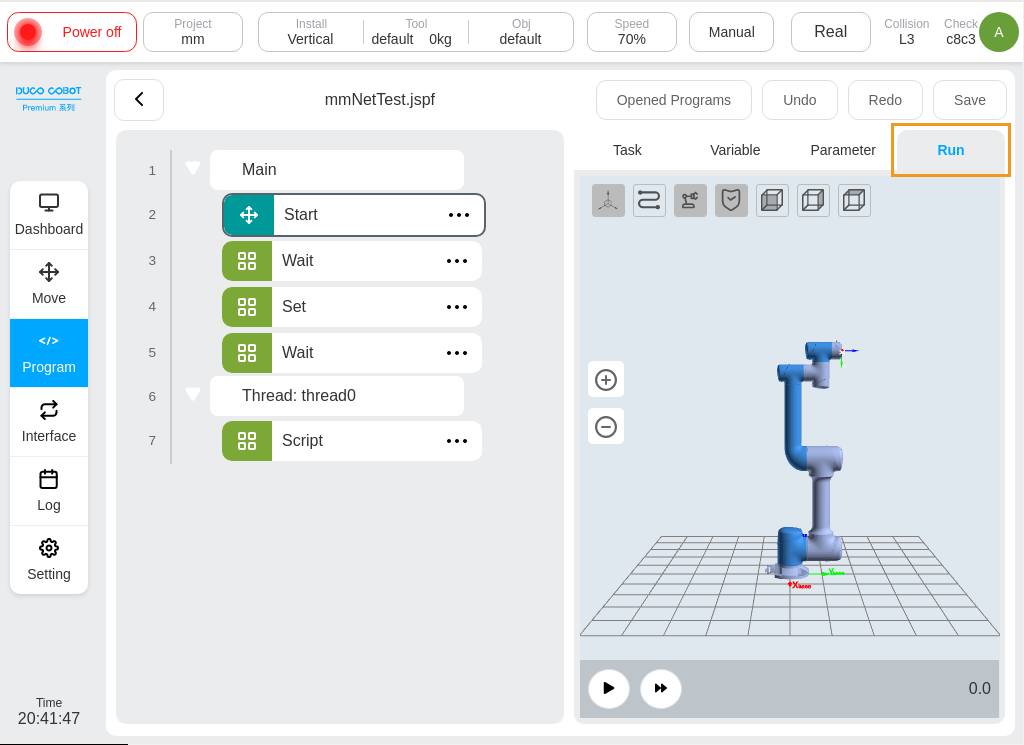
Cliquez sur Exécuter sur le panneau du robot simulé.
-
Si le robot SIASUN établit avec succès la communication Standard Interface avec Mech-Vision, le journal correspondant sera enregistré dans l’onglet Console du panneau de journal dans Mech-Vision.