Programmation de l’interface standard pour JAKA
Ce document explique comment écrire un programme d’interface standard en utilisant la fonction de programmation de JAKA. Vous pouvez appliquer le programme d’exemple avec de légères modifications. Il n’y a aucune exigence concernant la version du contrôleur du robot pour l’utilisation des programmes d’exemple fournis dans cette section.
Charger les programmes d’exemple
-
Ouvrez le dossier JAKA dans
Communication Component\Robot_Interface\JAKAdans le répertoire d’installation de Mech-Vision & Mech-Viz. Copiez les fichiersmmCali.zip,mmVis.zip,mmVisPath.zipetmmViz.zipsur la machine où JAKA Zu APP est installée. Les opérations ultérieures nécessitent l’importation des quatre fichiers copiés ici. -
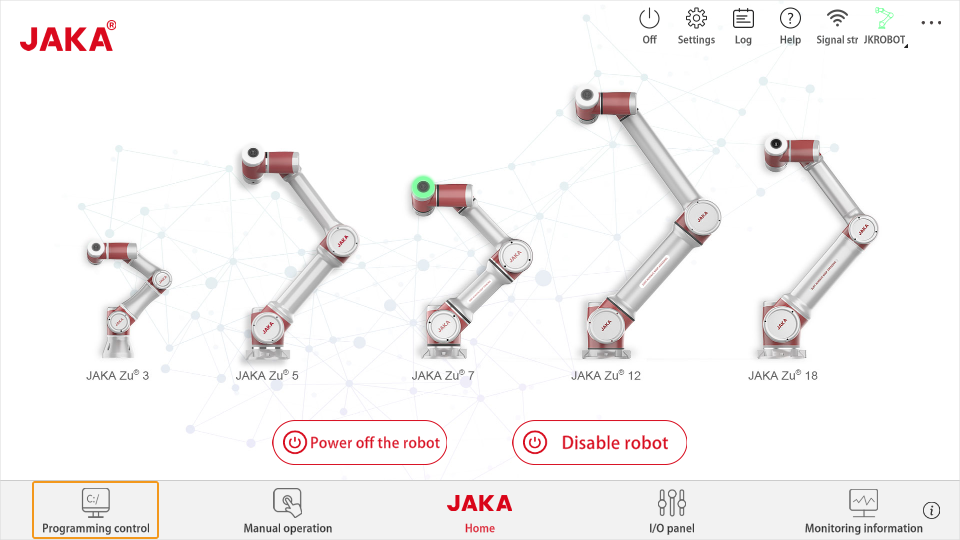
Revenez à l’interface principale de JAKA, puis cliquez sur Contrôle de programmation dans le coin inférieur gauche.
-
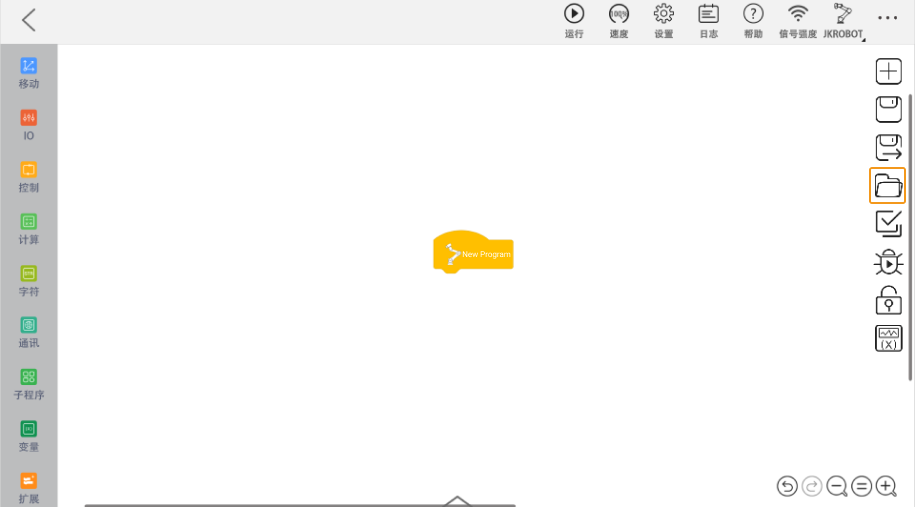
Cliquez sur l’icône de dossier sur le côté droit.
-
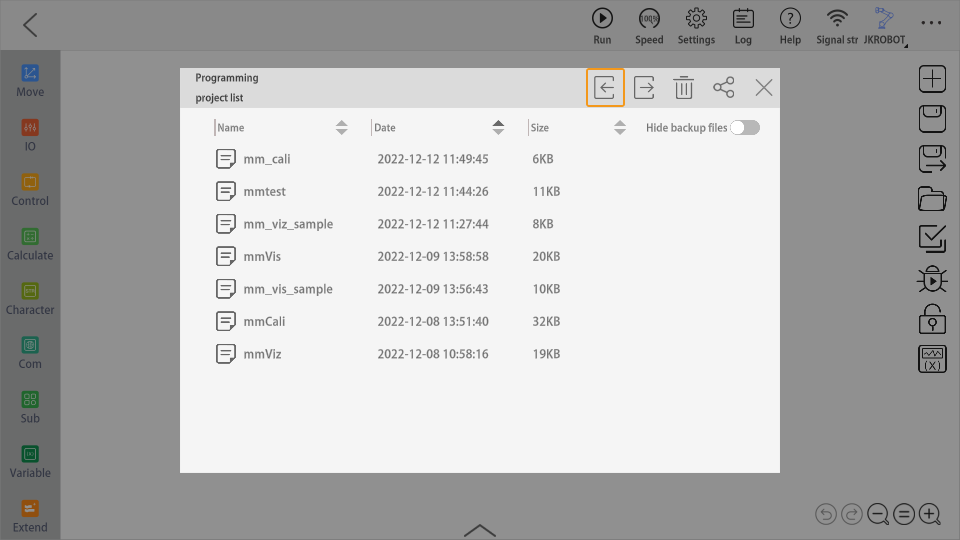
Cliquez sur l’icône d’importation.
-
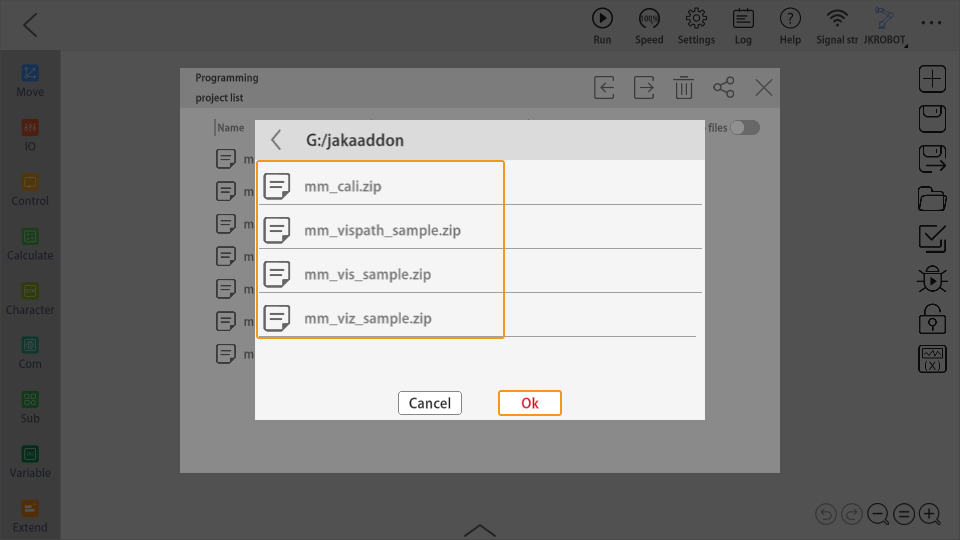
Sélectionnez les fichiers illustrés ci-dessous et cliquez sur Ok.
Calibration
Dans la fenêtre Contrôle de programmation, ouvrez le programme mmCali chargé.
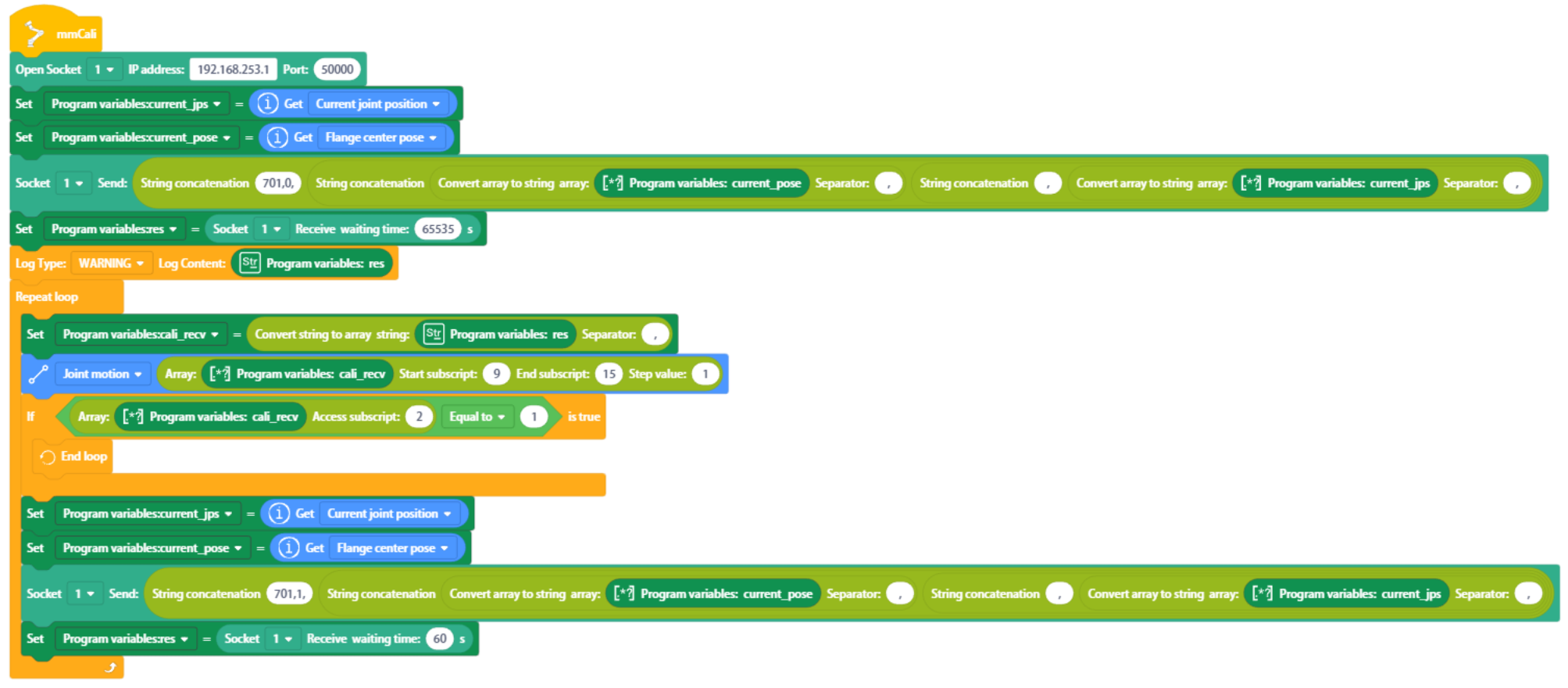
Description du programme
Vous n’aurez besoin d’effectuer que les deux modifications suivantes :
-
Étape 1 : Modifiez l’adresse IP et le numéro de port dans la commande Ouvrir SOCKET. L’adresse IP définie ici est l’adresse IP de l’IPC, qui doit être sur le même sous-réseau que celui du robot.
-
Étape 9 : Vous pouvez sélectionner le mouvement linéaire, et définir l’indice de début sur 3 et l’indice de fin sur 9.
Obtenir le résultat de vision depuis Mech-Vision
Dans la fenêtre Contrôle de programmation, ouvrez le programme mmVis chargé.
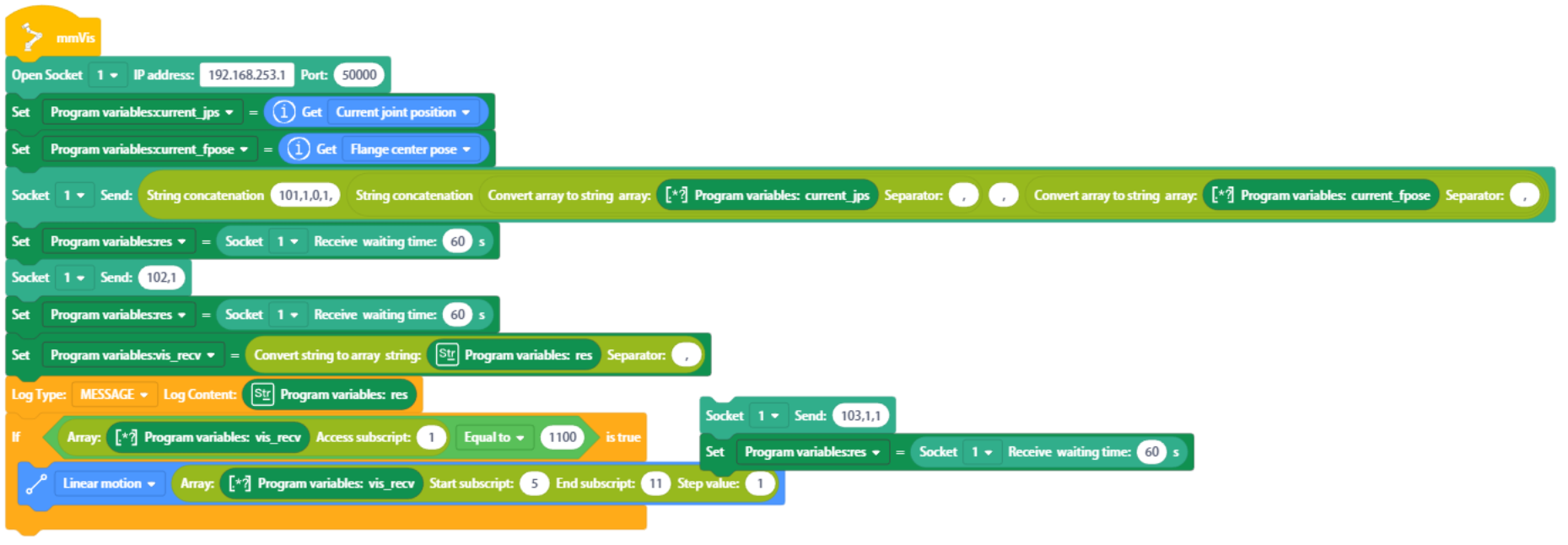
Description du programme
-
Étape 1 : Établissez une connexion Socket TCP/IP entre le robot et l’IPC. L’adresse IP définie ici est l’adresse IP de l’IPC, qui doit être sur le même sous-réseau que celui du robot.
-
Étape 2 : Obtenez les positions articulaires actuelles du robot et stockez-les dans la variable current_jps.
-
Étape 3 : Obtenez la pose actuelle de la bride du robot et stockez-la dans la variable current_fpose.
-
Étape 4 : Envoyez la commande pour exécuter le projet Mech-Vision. Veuillez vous référer à Commande 101 pour des descriptions détaillées des paramètres.
-
Étape 5 : Recevez le code d’état renvoyé par Commande 101, et stockez-le dans la variable res.
-
Étape 6 : Envoyez la commande pour obtenir le résultat de vision. Veuillez vous référer à Commande 102 pour des descriptions détaillées des paramètres.
-
Étape 7 : Recevez les données renvoyées par Commande 102, et stockez-les dans la variable res.
-
Étape 8 : Convertissez les données reçues à l’Étape 7 de chaînes en tableau et stockez les données dans la variable vis_recv.
-
Étape 9 : Imprimez le journal.
-
Étape 10 : Déterminez si la valeur de l’indice d’accès 1 de vis_recv est 1100. 1100 indique que le résultat de vision a été obtenu avec succès.
-
Étape 11 : Déplacez-vous vers le premier point de vision en mouvement linéaire.
Pour le mouvement linéaire du robot JAKA, le logiciel doit envoyer le TCP au robot ; et pour le mouvement articulé, le logiciel doit envoyer les positions articulaires.
Obtenir la trajectoire planifiée depuis Mech-Viz
Dans la fenêtre Contrôle de programmation, ouvrez le programme mmViz chargé.
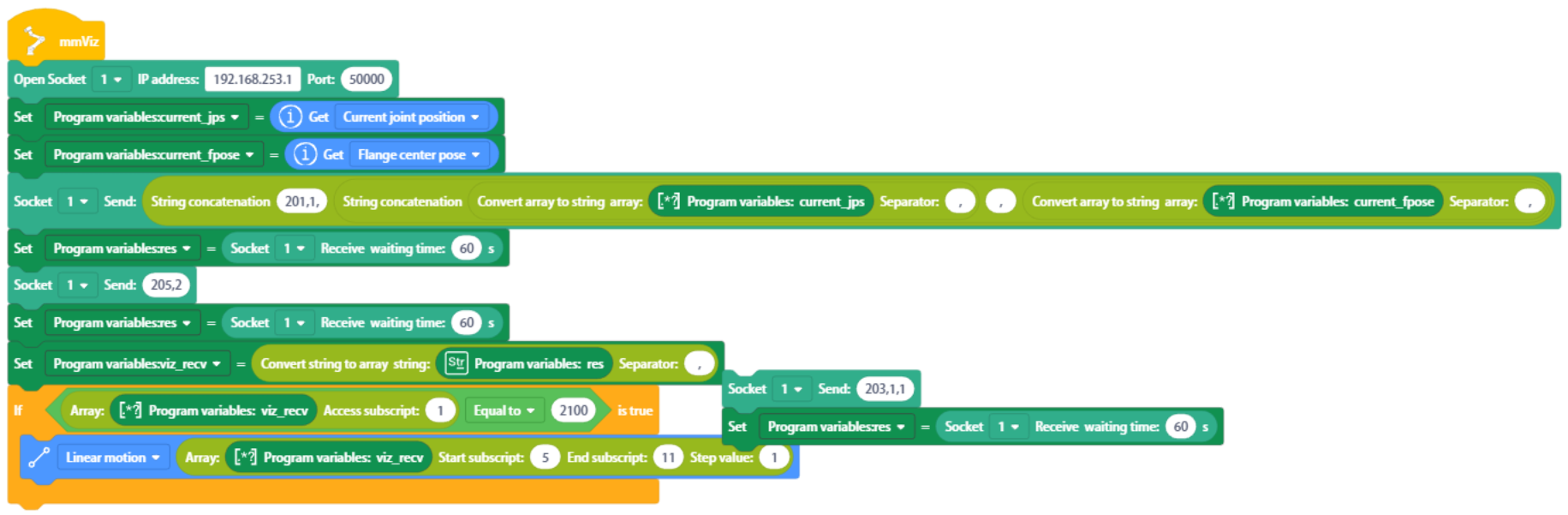
Description du programme
-
Étape 1 : Établissez une connexion Socket TCP/IP entre le robot et l’IPC. L’adresse IP définie ici est l’adresse IP de l’IPC, qui doit être sur le même sous-réseau que celui du robot.
-
Étape 2 : Obtenez les positions articulaires actuelles du robot et stockez-les dans la variable current_jps.
-
Étape 3 : Obtenez la pose actuelle de la bride du robot et stockez-la dans la variable current_fpose.
-
Étape 4 : Envoyez la commande pour exécuter le projet Mech-Viz. Veuillez vous référer à Commande 201 pour des descriptions détaillées des paramètres.
-
Étape 5 : Recevez le code d’état renvoyé par Commande 201, et stockez-le dans la variable res.
-
Étape 6 : Envoyez la commande pour obtenir la trajectoire planifiée depuis Mech-Viz. Veuillez vous référer à Commande 205 pour des descriptions détaillées des paramètres.
-
Étape 7 : Recevez les données renvoyées par Commande 205, et stockez-les dans la variable res.
-
Étape 8 : Convertissez les données reçues à l’Étape 7 de chaînes en tableau et stockez les données dans la variable viz_recv.
-
Étape 9 : Déterminez si la valeur de l’indice d’accès 1 de viz_recv est 2100. 2100 indique que la trajectoire planifiée a été obtenue avec succès depuis Mech-Viz.
-
Étape 10 : Déplacez-vous vers le premier point de passage en mouvement linéaire.
Pour le mouvement linéaire du robot JAKA, le logiciel doit envoyer le TCP au robot ; et pour le mouvement articulé, le logiciel doit envoyer les positions articulaires.
Obtenir la trajectoire planifiée depuis Mech-Vision
Dans la fenêtre Contrôle de programmation, ouvrez le programme mmVisPath chargé.
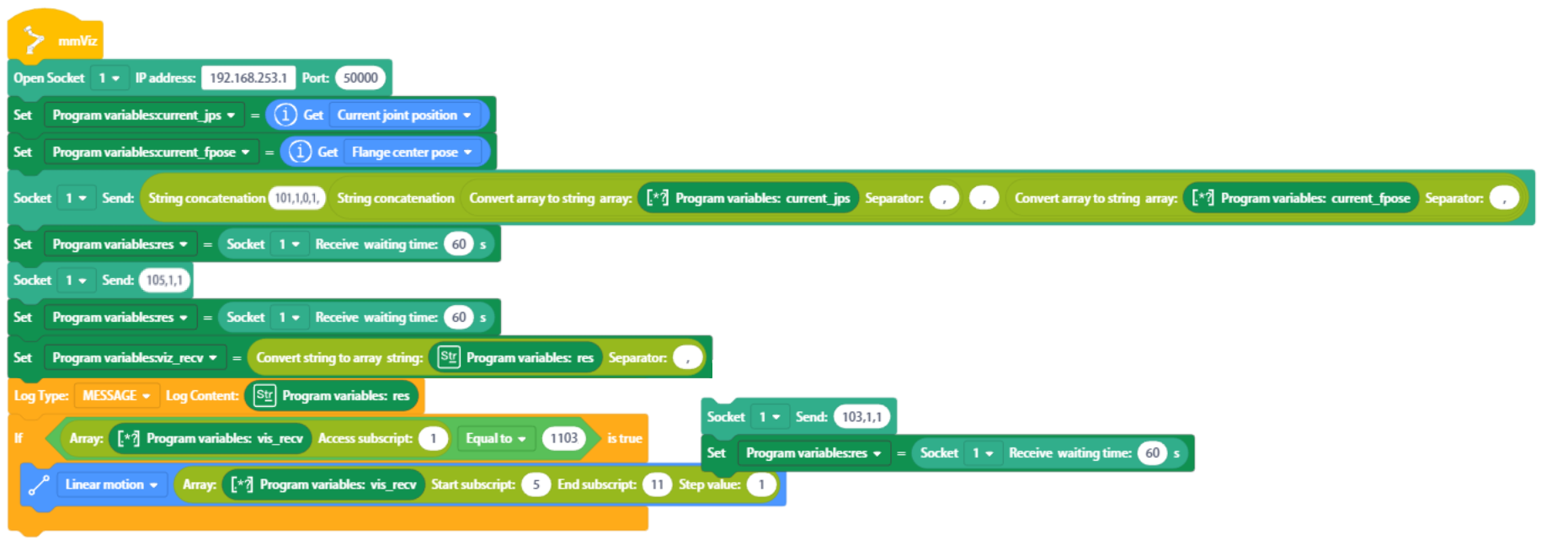
Description du programme
-
Étape 1 : Établissez une connexion Socket TCP/IP entre le robot et l’IPC. L’adresse IP définie ici est l’adresse IP de l’IPC, qui doit être sur le même sous-réseau que celui du robot.
-
Étape 2 : Obtenez les positions articulaires actuelles du robot et stockez-les dans la variable current_jps.
-
Étape 3 : Obtenez la pose actuelle de la bride du robot et stockez-la dans la variable current_fpose.
-
Étape 4 : Envoyez la commande pour exécuter le projet Mech-Vision. Veuillez vous référer à Commande 101 pour des descriptions détaillées des paramètres.
-
Étape 5 : Recevez le code d’état renvoyé par Commande 101, et stockez-le dans la variable res.
-
Étape 6 : Envoyez la commande pour obtenir la trajectoire planifiée depuis Mech-Vision. Veuillez vous référer à Commande 105 pour des descriptions détaillées des paramètres.
-
Étape 7 : Recevez les données renvoyées par Commande 105, et stockez-les dans la variable res.
-
Étape 8 : Convertissez les données reçues à l’Étape 7 de chaînes en tableau et stockez les données dans la variable vis_recv.
-
Étape 9 : Imprimez le journal.
-
Étape 10 : Déterminez si la valeur de l’indice d’accès 1 de vis_recv est 1103. 1103 indique que la trajectoire planifiée a été obtenue avec succès depuis Mech-Vision.
-
Étape 11 : Déplacez-vous vers le premier point de passage en mouvement linéaire.
Pour le mouvement linéaire du robot JAKA, le logiciel doit envoyer le TCP au robot ; et pour le mouvement articulé, le logiciel doit envoyer les positions articulaires.