Configuration de la communication Master-Control
Ce guide vous explique comment configurer la communication Master-Control avec un robot Doosan.
Préparation
Vérifier les versions matérielles et logicielles
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Le robot appartient à la série M, et le contrôleur de robot de cette série est illustré ci-dessous.

-
Version du micrologiciel du contrôleur : V2.8.
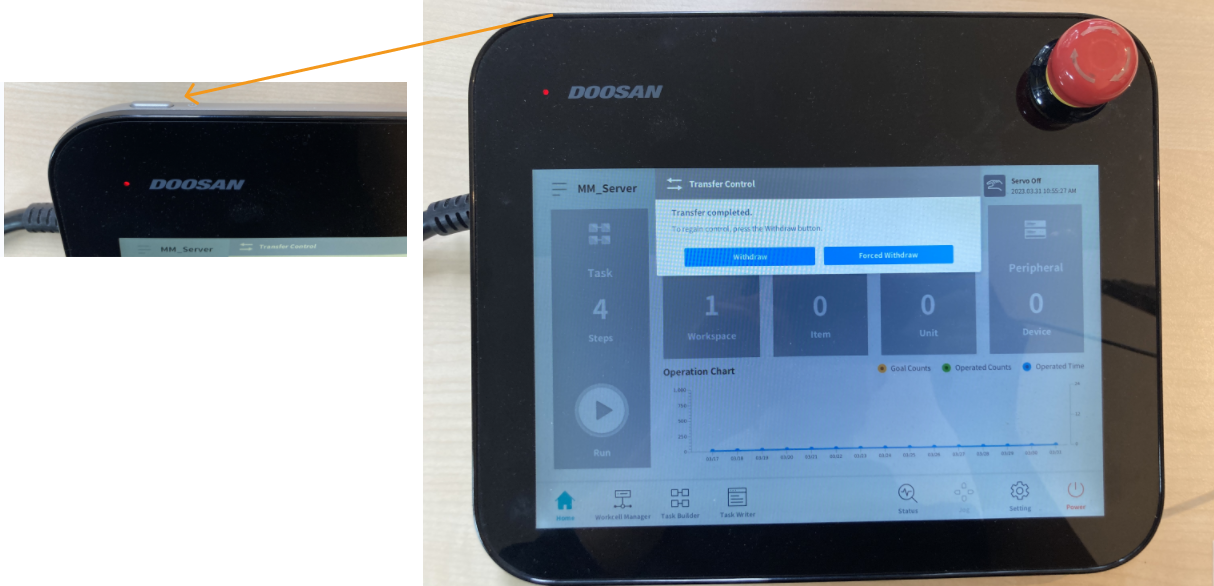
Démarrer le robot et la console d’enseignement
-
Actionnez l’interrupteur d’alimentation sous le contrôleur.
-
Appuyez sur le bouton d’alimentation dans l’angle supérieur gauche de la console d’enseignement.
-
Sur l’écran d’accueil de la console d’enseignement, appuyez sur Paramètres dans le panneau inférieur, puis sur Mise à jour du robot pour confirmer que la version du micrologiciel, qui est GV02080000 sur l’image ci-dessous, est V2.8.
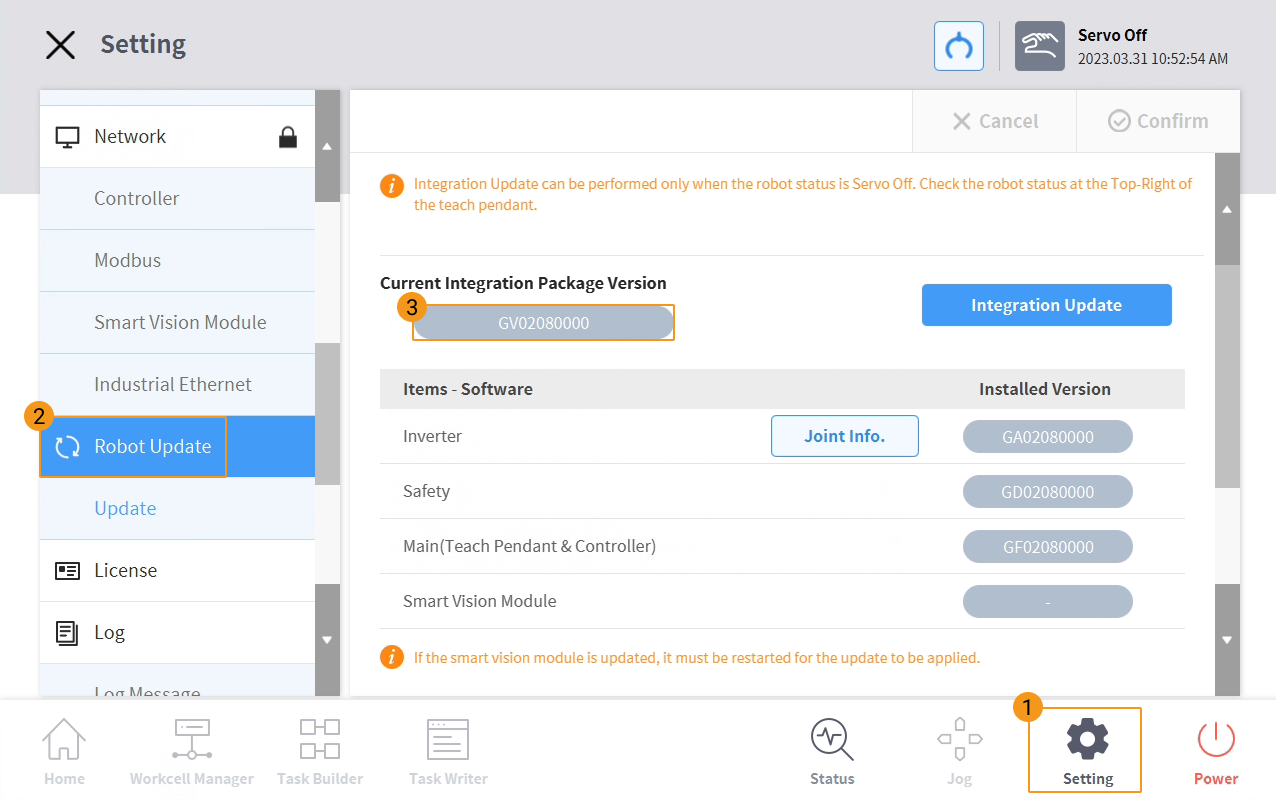
-
Sur la console d’enseignement, appuyez sur État dans le panneau inférieur puis sélectionnez Marche. Une fenêtre Message de sécurité s’affiche.
Avant d’appuyer sur une option du panneau inférieur, assurez-vous d’avoir fermé les fenêtres des autres options affichées à l’écran. 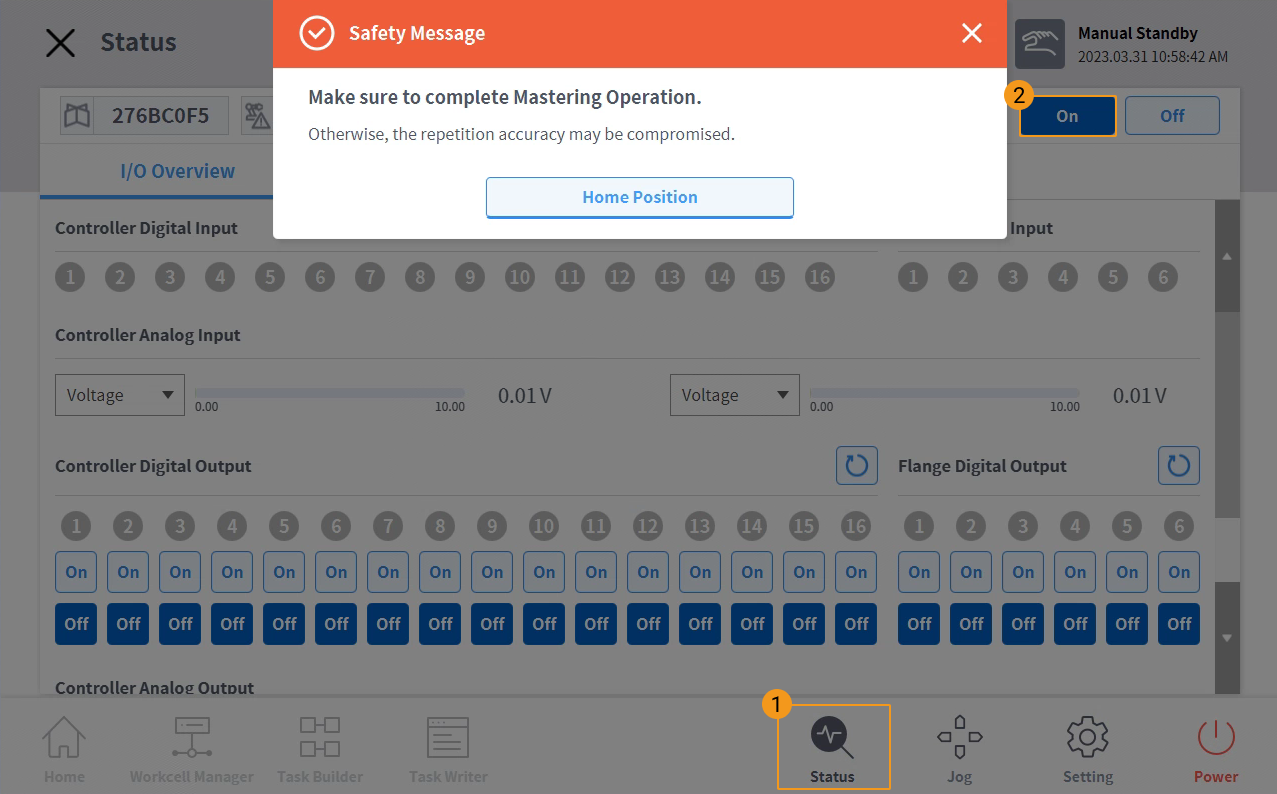
-
Maintenez le bouton Position d’origine enfoncé jusqu’à ce qu’une fenêtre Message d’information apparaisse. La fenêtre disparaît après quelques secondes, indiquant que le robot s’est déplacé vers la position d’origine. Ensuite, appuyez sur le bouton de sortie pour fermer la fenêtre Message de sécurité.
Avant d’effectuer cette étape, assurez-vous de la sécurité du personnel et du robot afin d’éviter toute collision lors des déplacements du robot. 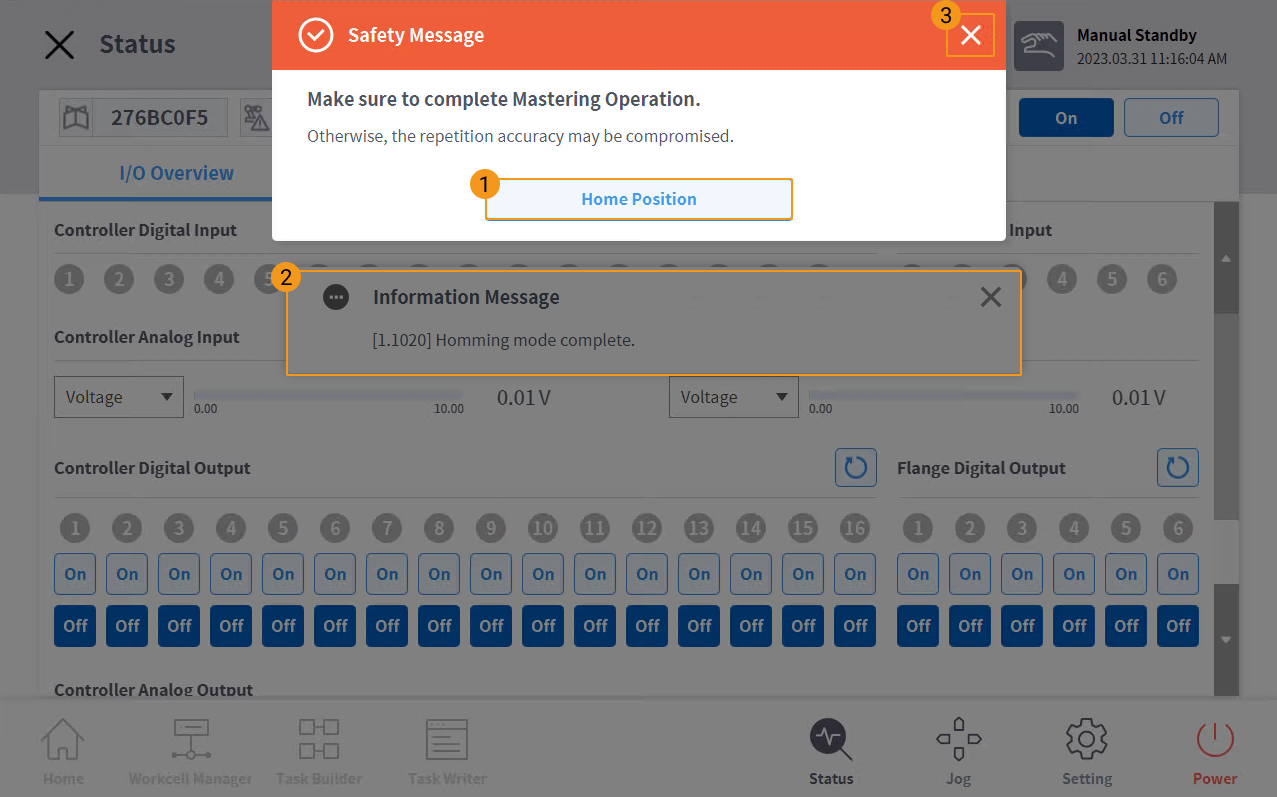
Après les opérations ci-dessus, le témoin d’état du Servo dans l’angle supérieur droit devient vert.
Configurer la connexion réseau
Connecter le matériel
Utilisez le câble Ethernet pour relier les ports réseau de l’IPC et du contrôleur du robot. Les trois ports réseau indiqués sur l’image ci-dessous peuvent être utilisés pour la communication TCP ; vous pouvez choisir n’importe lequel d’entre eux.

Définir l’adresse IP
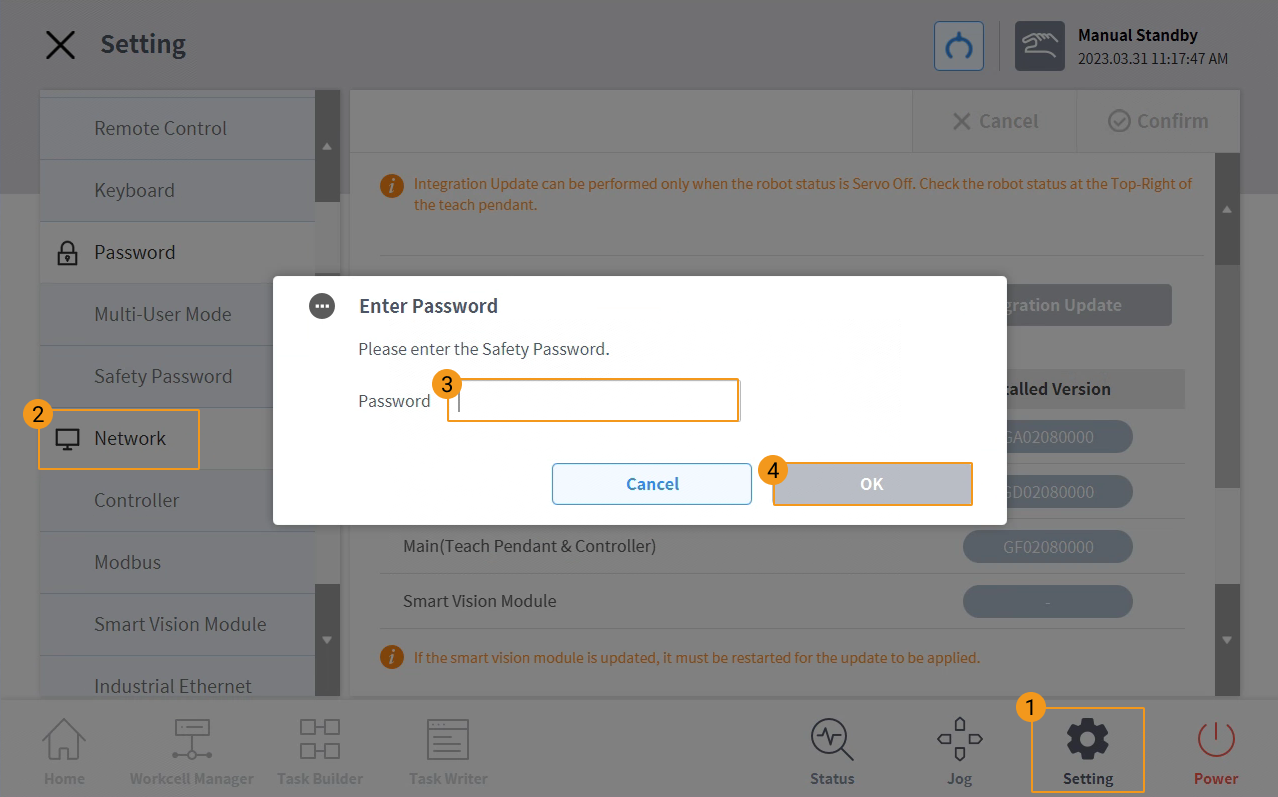
-
Sur la console d’enseignement, appuyez sur Paramètres dans le panneau inférieur puis sur Réseau. Saisissez ensuite le mot de passe et appuyez sur OK. Le mot de passe par défaut est admin.
-
Appuyez sur Adresse statique, définissez l’adresse IP du robot, puis appuyez sur Définir.
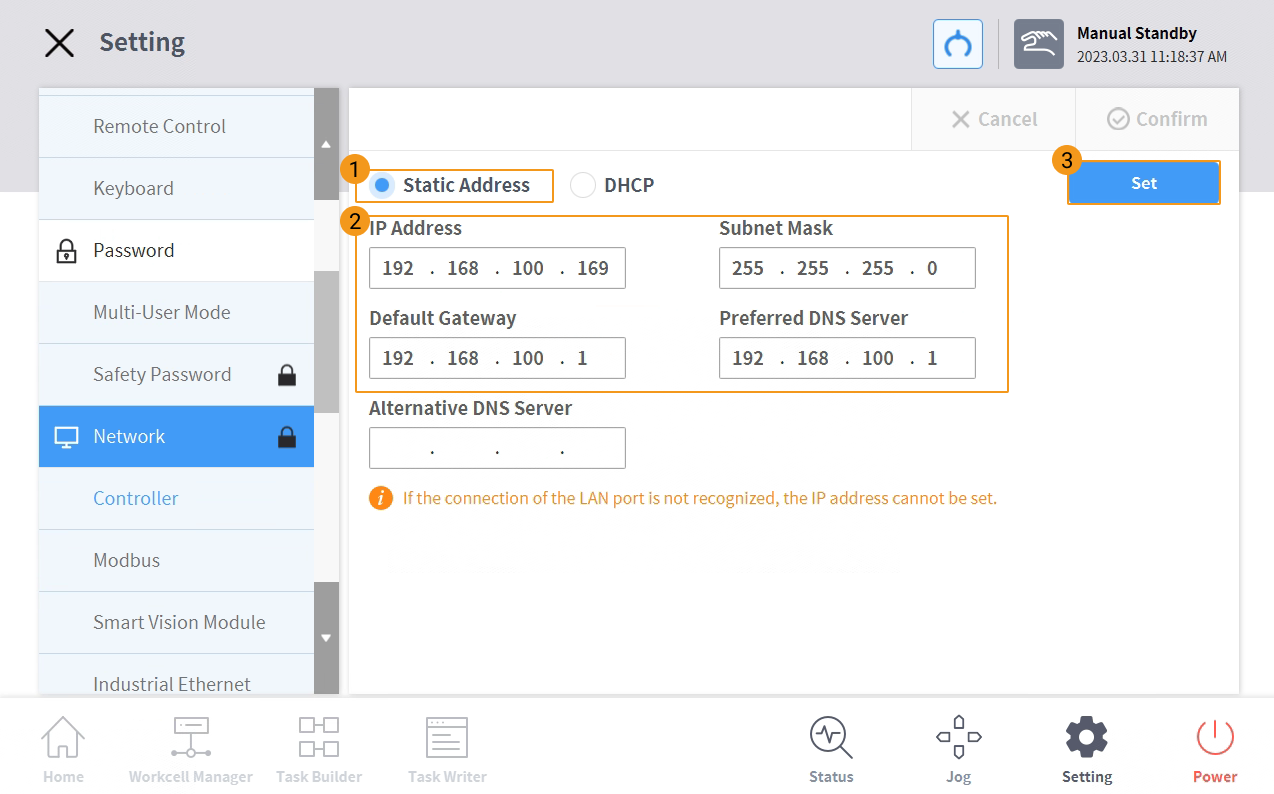
-
Définissez l’adresse IP de l’IPC.
Pour permettre la communication entre l’IPC et le contrôleur du robot, le port réseau de l’IPC connecté au contrôleur doit se trouver sur le même sous-réseau que le robot. Cela signifie que les parties réseau et les masques de sous-réseau des adresses IP doivent être identiques. Par exemple, 192.168.100.169/255.255.255.0 et 192.168.100.170/255.255.255.0 sont sur le même sous-réseau.
Préparer les fichiers de programme
-
Sur l’IPC, allez à
Communication Component/Robot_Server/Robot_FullControl/doosan/Backup_Scriptdepuis le répertoire d’installation où Mech-Vision et Mech-Viz sont installés. -
Branchez la clé USB sur le port USB de l’IPC. Copiez le fichier MM_Server.txt du dossier Backup_Script sur la clé USB puis retirez-la en toute sécurité.
Charger les fichiers de programme sur le robot
| Il est recommandé de sauvegarder les fichiers système du robot avant de charger les fichiers de programme Master-Control afin d’éviter une corruption du système pouvant être causée par l’opération de chargement. En cas de problème, vous pouvez utiliser le fichier de sauvegarde pour restaurer le système du robot. Veuillez vous référer à Sauvegarder et restaurer les fichiers du robot pour des instructions détaillées. |
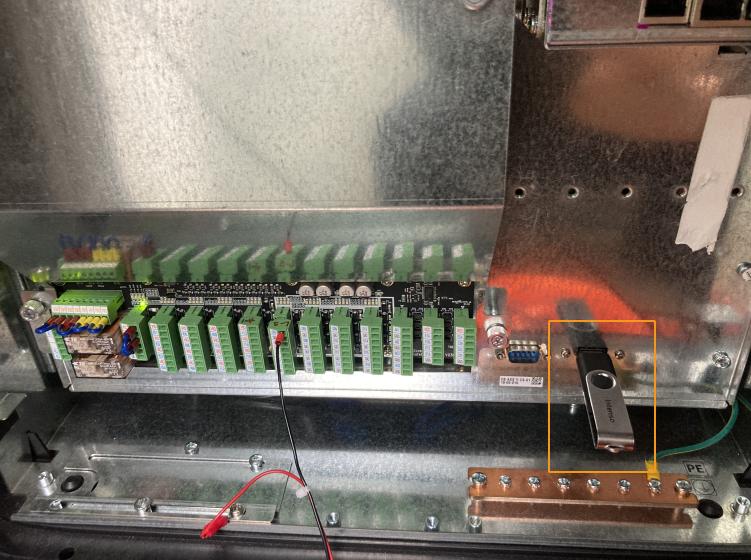
-
Branchez la clé USB contenant le fichier de programme sur le port USB du contrôleur du robot.
-
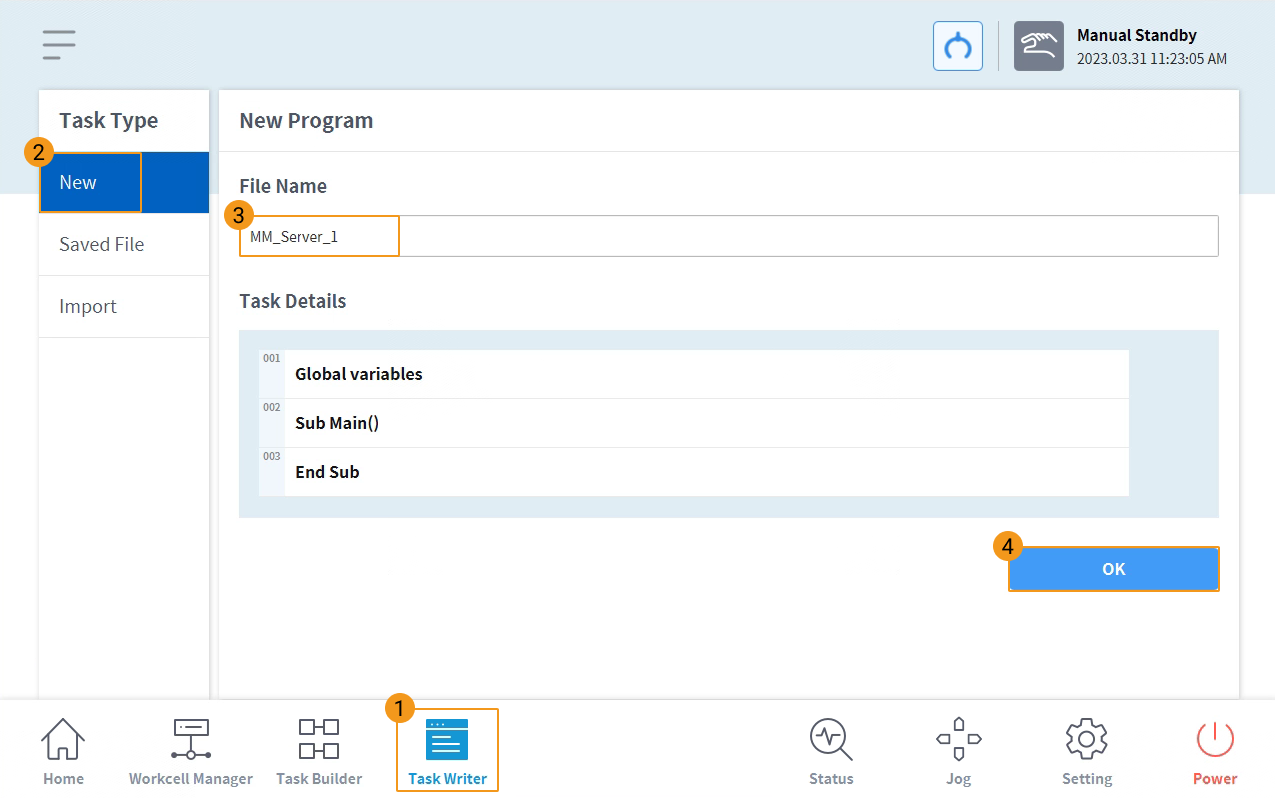
Sur la console d’enseignement, appuyez sur Éditeur de tâches → Nouveau, saisissez un nom de fichier (par ex. MM_Server_1), puis appuyez sur OK.
-
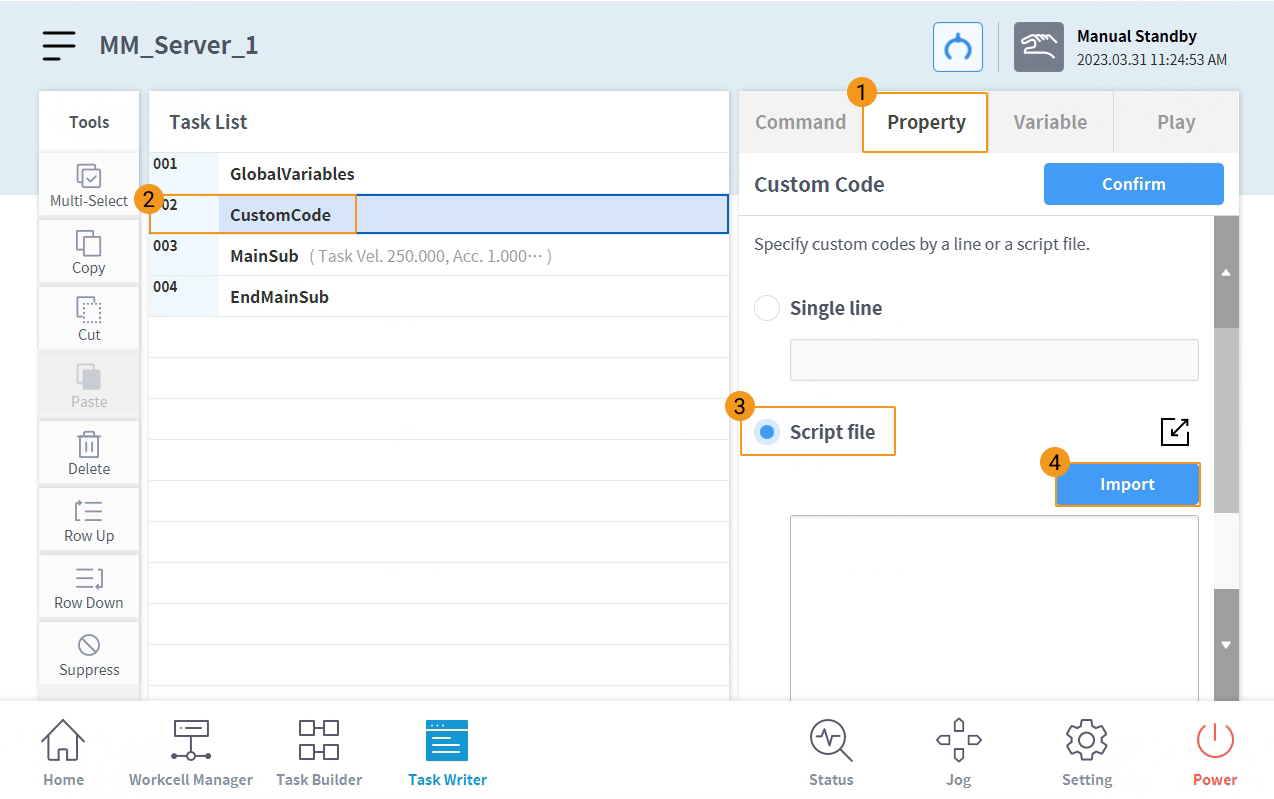
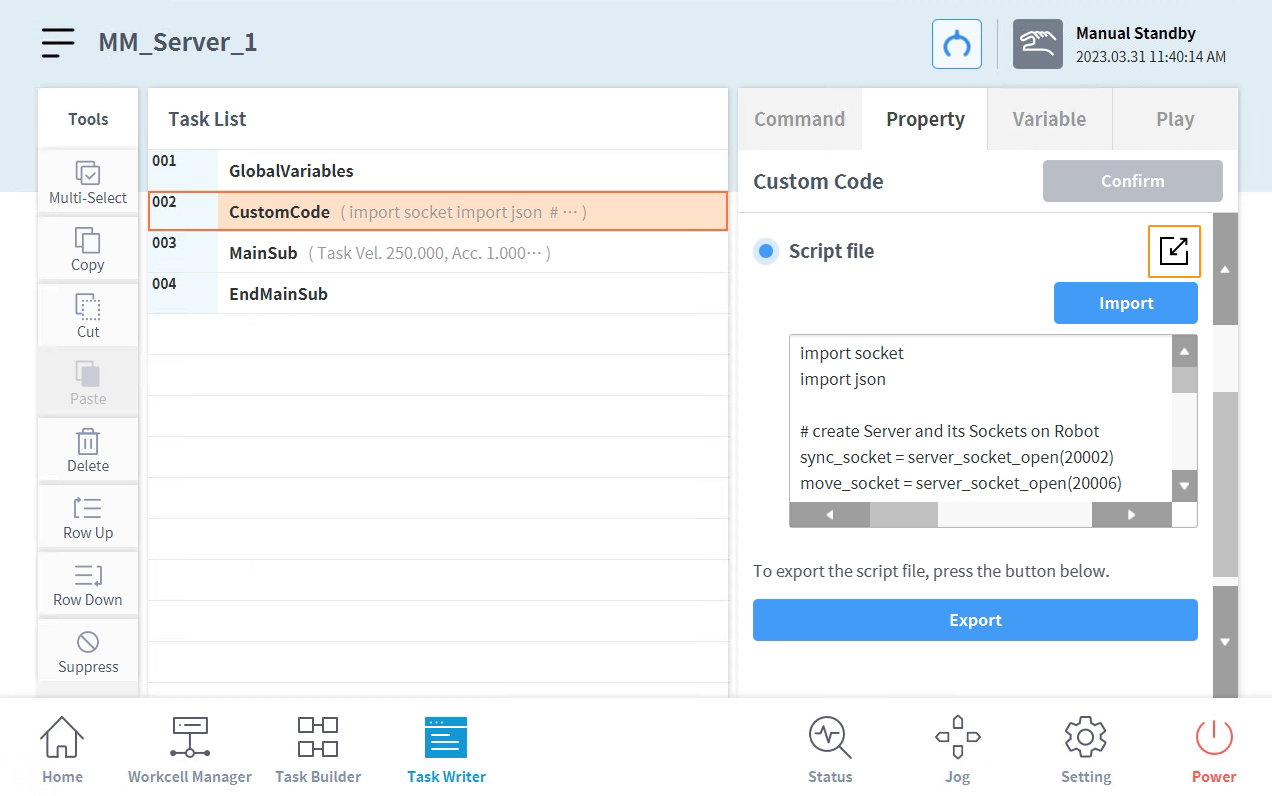
Appuyez sur Propriété et sélectionnez CustomCode. Ensuite, appuyez successivement sur Fichier de script et Importer.
-
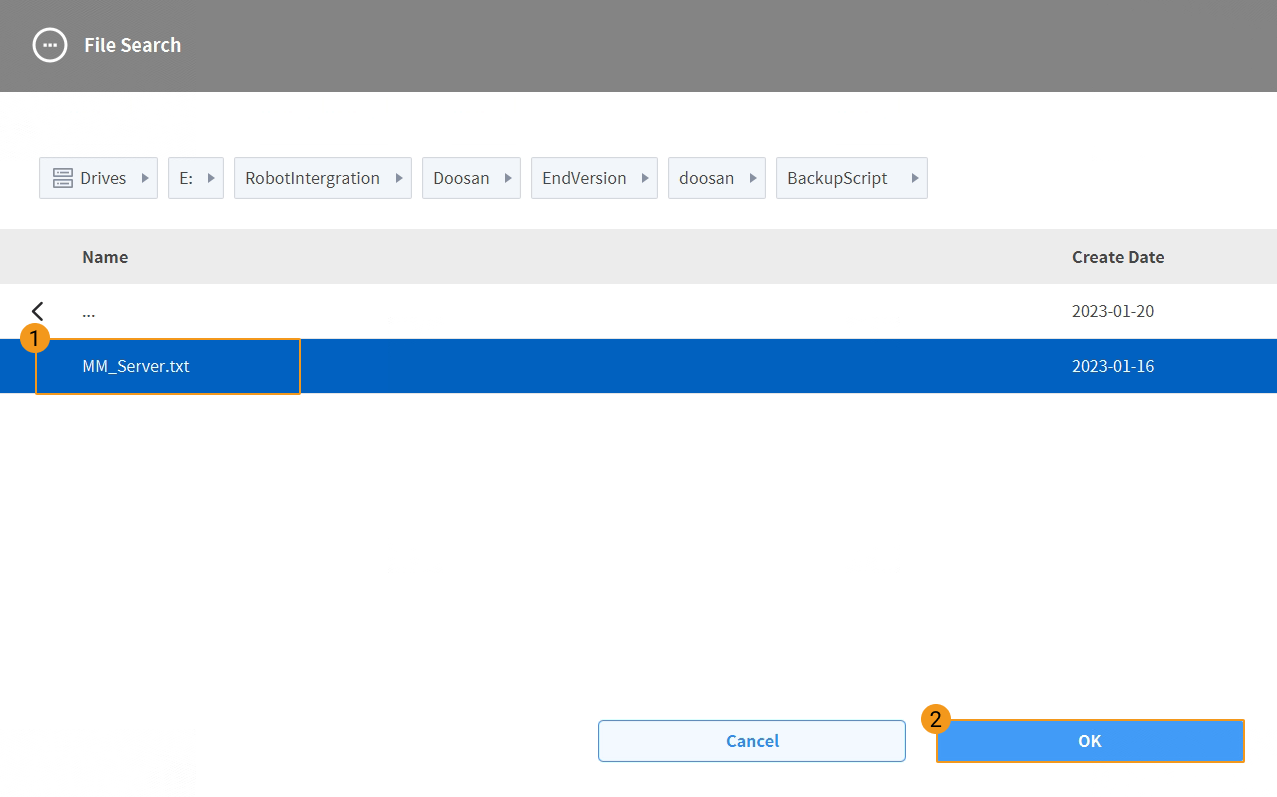
Dans la fenêtre contextuelle, repérez et sélectionnez le fichier MM_Server.txt, puis appuyez sur OK pour terminer.
-
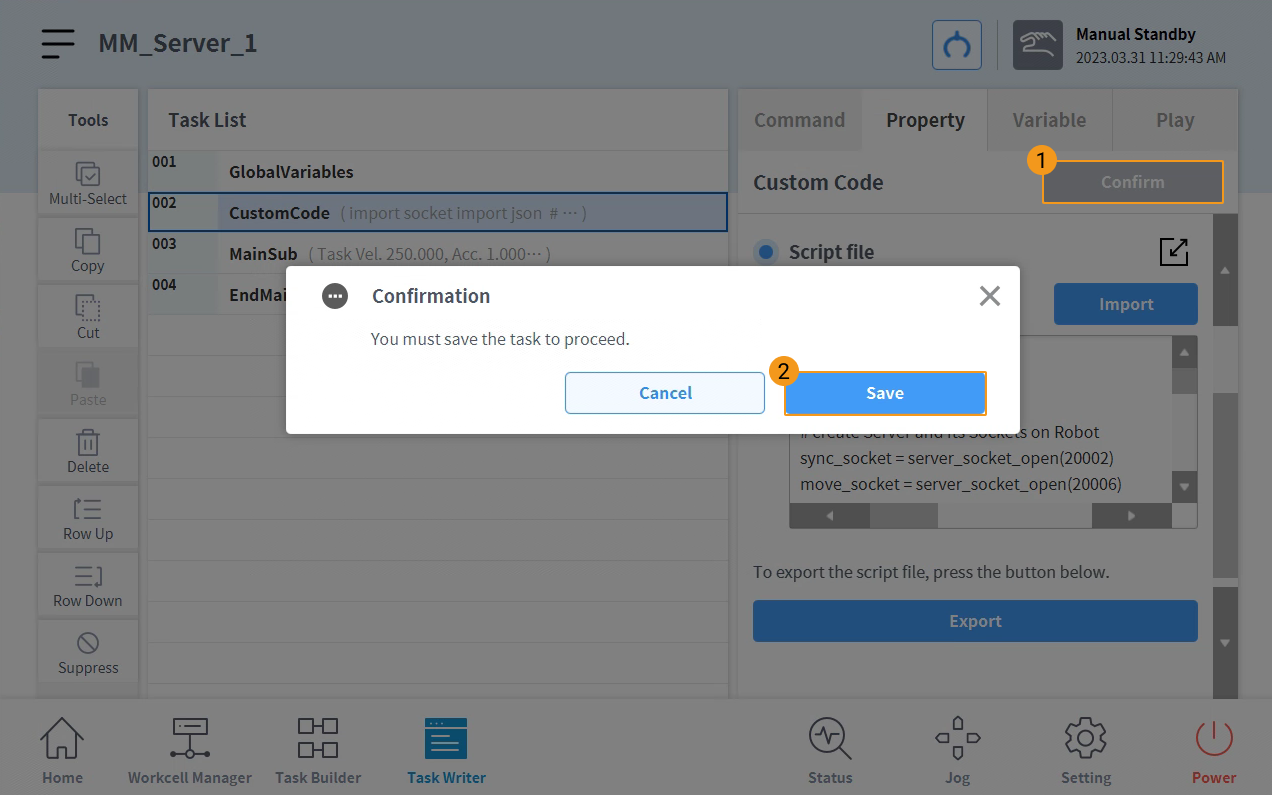
Appuyez sur Confirmer puis sur Enregistrer.
Tester la communication Master-Control
-
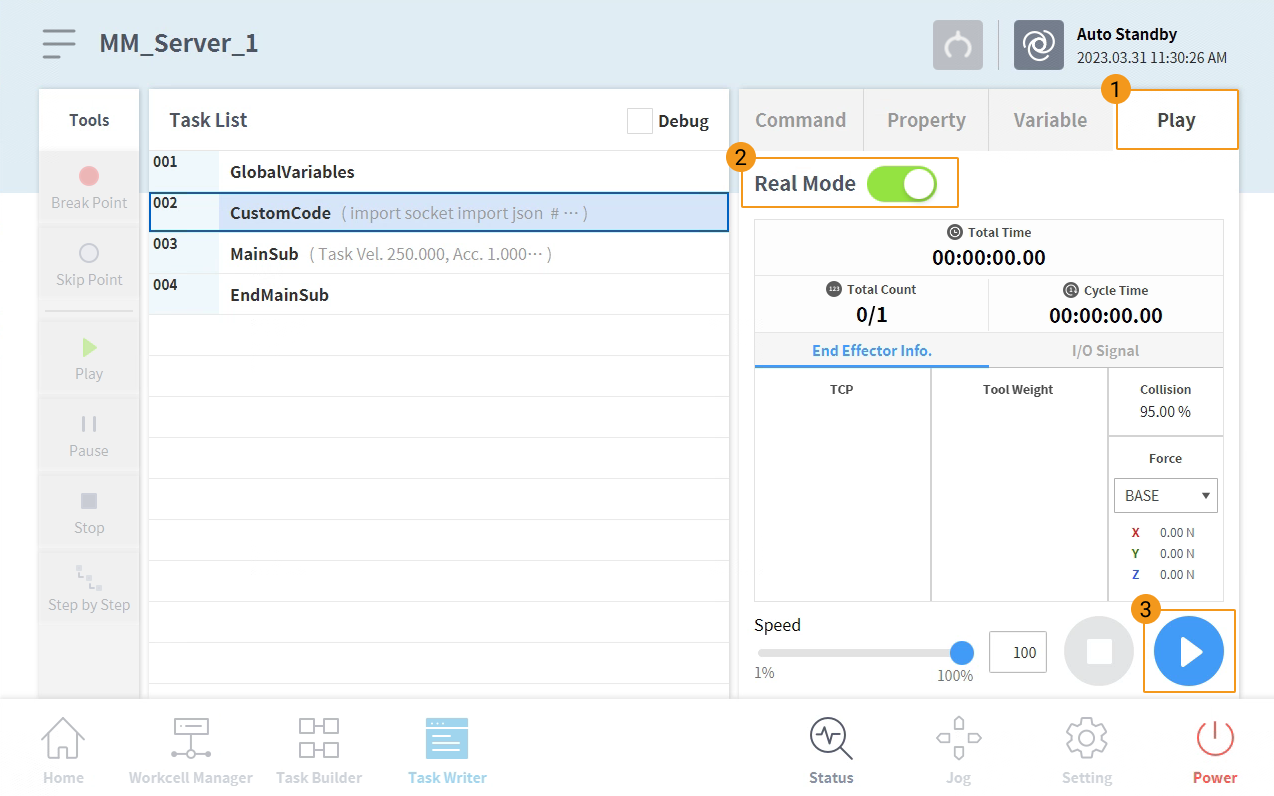
Sur la console d’enseignement, appuyez sur Lecture et activez le Mode réel. Réduisez la vitesse du robot de manière appropriée et appuyez sur le bouton d’exécution pour lancer le programme Master-Control.
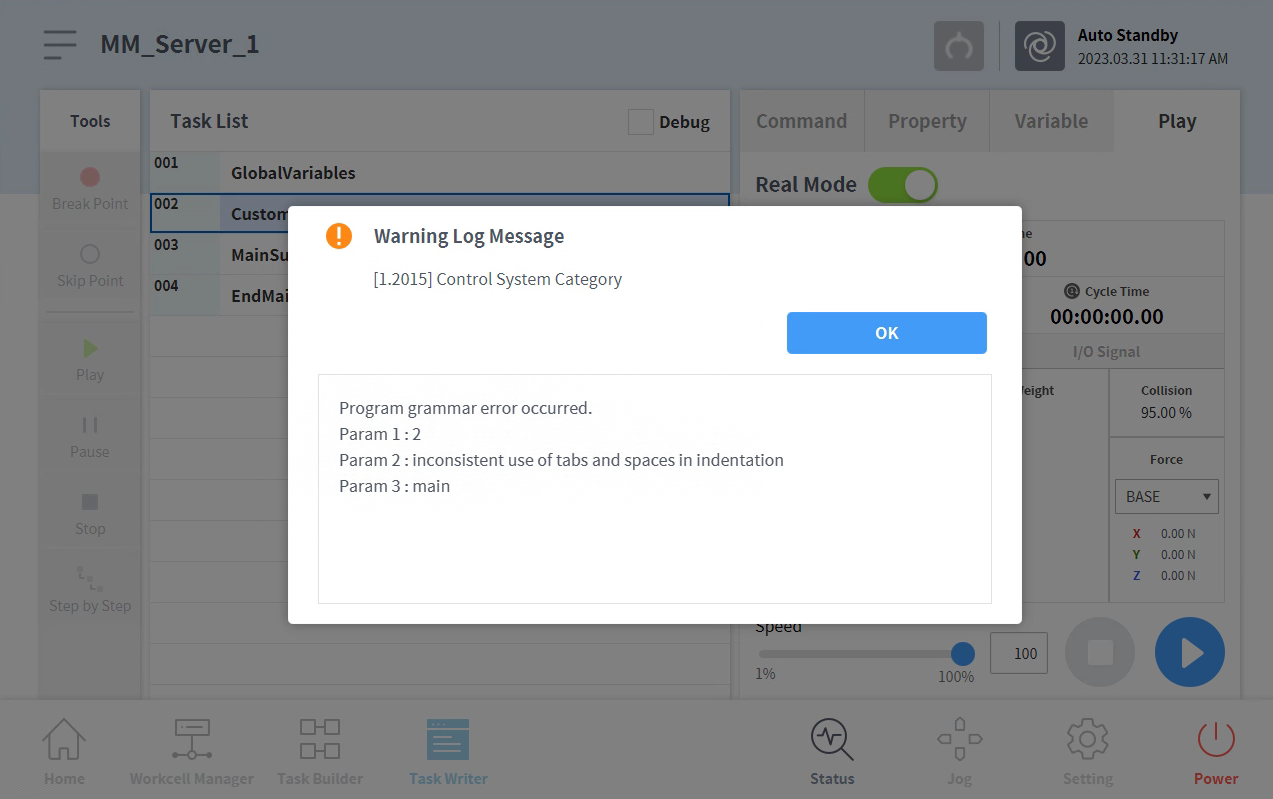
Si un message d’avertissement comme ci-dessous apparaît, vérifiez s’il existe une utilisation incohérente des tabulations et des espaces dans l’indentation du script Python MM_Server_1. Python utilise l’indentation pour distinguer les différents blocs de code et impose donc des exigences strictes en matière d’indentation.
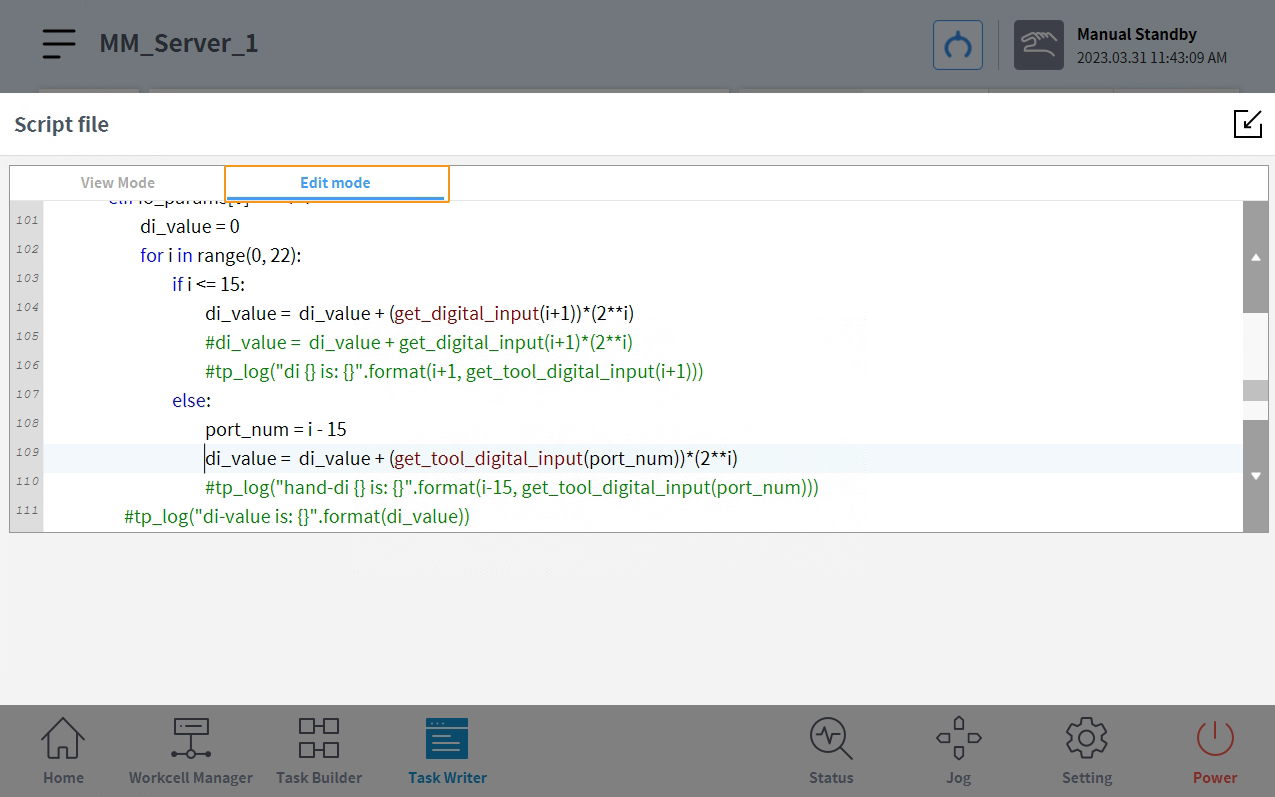
Suivez les étapes indiquées sur l’image ci-dessous pour éditer le script sur la console d’enseignement. Vous pouvez également modifier le fichier MM_Server.txt sur votre PC pour corriger le problème d’indentation puis réimporter le fichier.
-
Reportez-vous à Test de la connexion du robot pour effectuer les étapes suivantes.
| Si Mech-Viz est déconnecté, le programme du côté robot doit également être arrêté. Autrement dit, la tâche « MM_Server_1 » ci-dessus doit être arrêtée. Si vous souhaitez vous reconnecter et contrôler le robot, veuillez réexécuter le programme. |
Opérations courantes
Définir le TCP
Lorsqu’un outil d’extrémité est utilisé dans le projet Mech-Viz, veuillez définir la Position du centre de l’outil conformément aux instructions suivantes. Une pince est utilisée comme exemple dans les instructions ci-dessous.
-
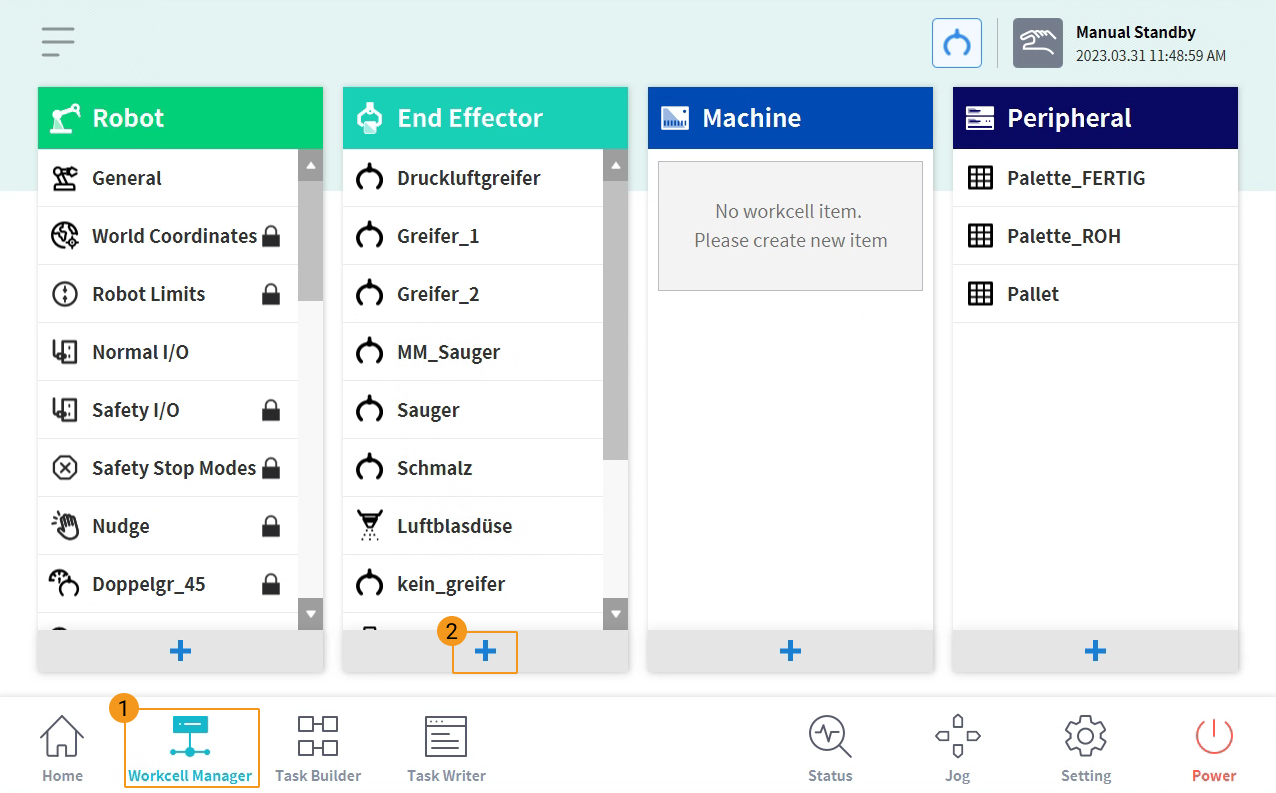
Sur la console d’enseignement, appuyez sur Gestionnaire de cellule dans le panneau inférieur puis sur +.
-
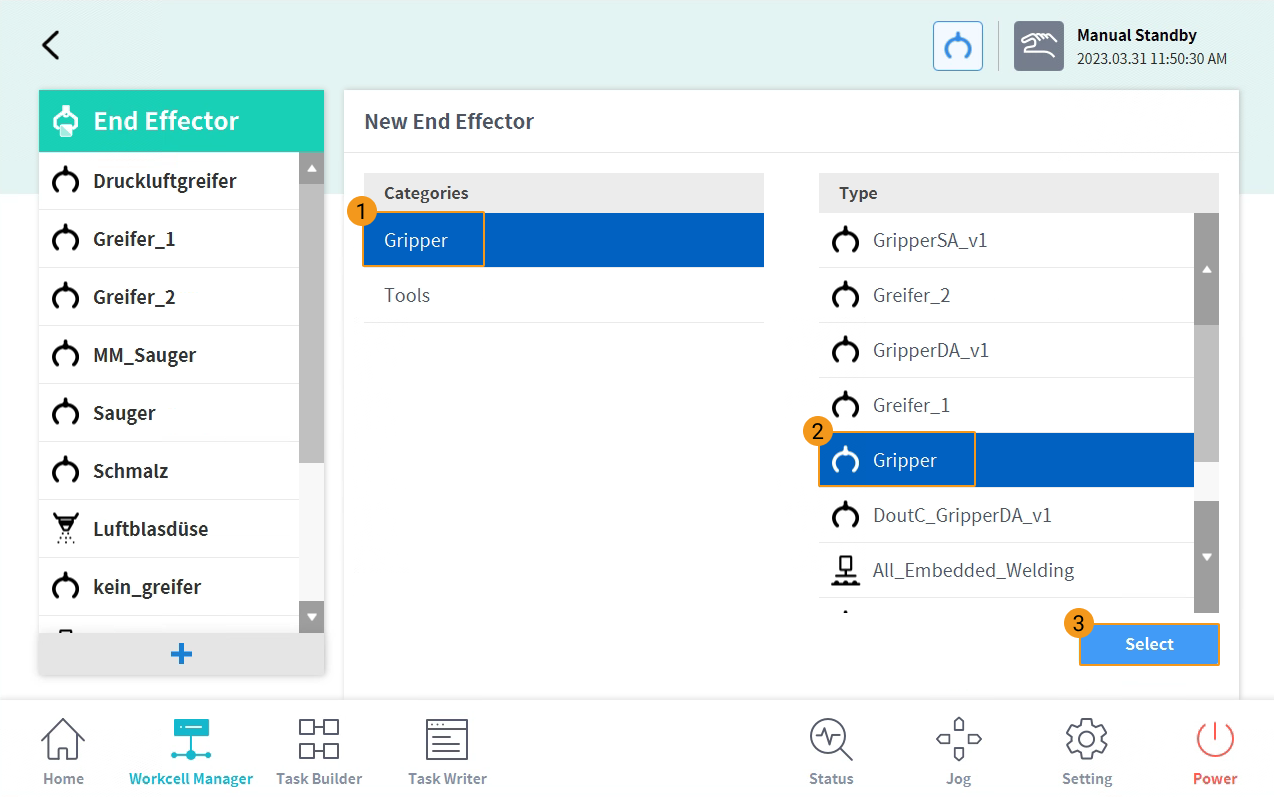
Sélectionnez Gripper dans Catégories et Gripper comme Type, puis appuyez sur Sélectionner.
-
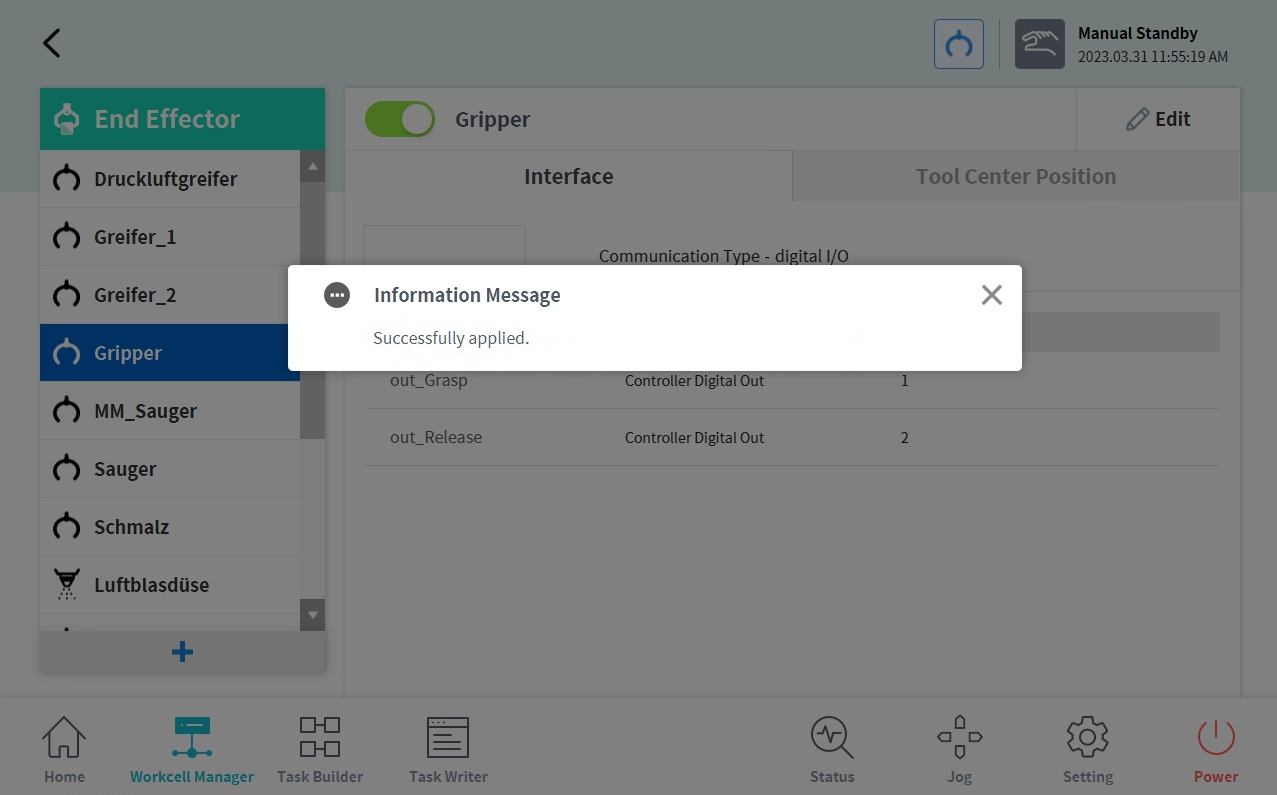
Nommez la pince et appuyez sur Position du centre de l’outil pour définir les paramètres de Position. La valeur Z dans cet exemple est réglée sur 200 mm. Une fois les réglages terminés, appuyez sur Confirmer.
Étant donné que le TCP dans Mech-Viz ne peut pas être synchronisé avec la console d’enseignement, veuillez vous assurer que les paramètres Position définis ici sont identiques aux valeurs TCP définies dans Mech-Viz. Sinon, le mouvement linéaire du robot sera problématique lorsqu’il existe des décalages et rotations particuliers de l’outil d’extrémité. 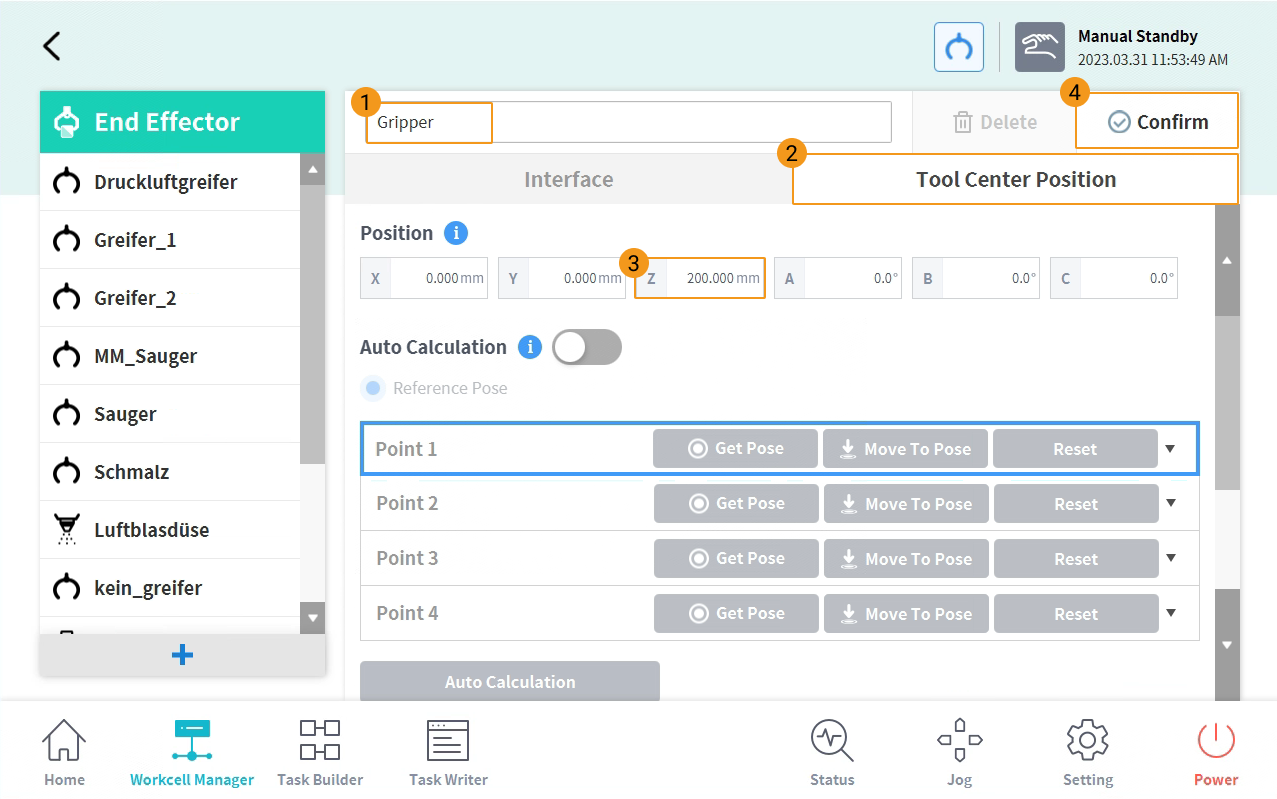
-
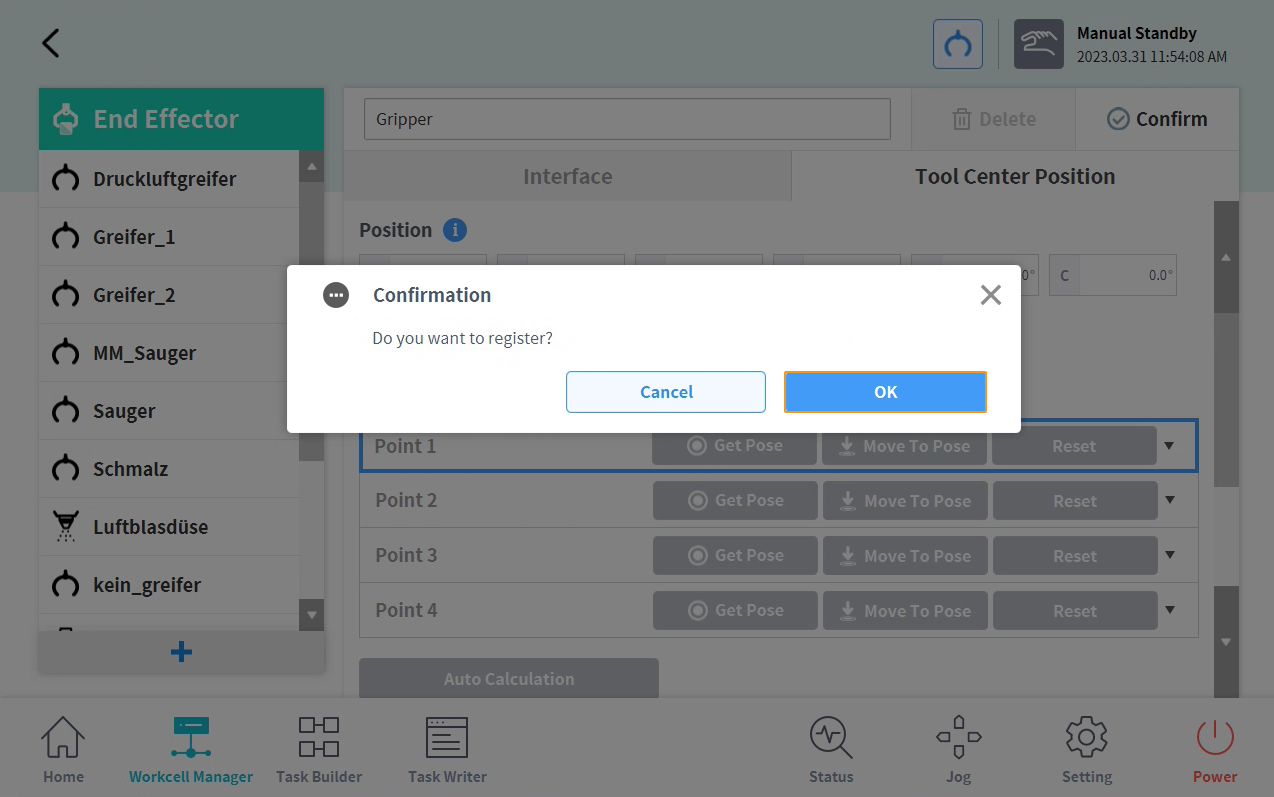
Appuyez sur OK pour enregistrer les réglages ; un message « Appliqué avec succès » s’affichera.
Sauvegarder et restaurer les fichiers du robot
Il est recommandé de sauvegarder les fichiers système du robot avant de charger les fichiers de programme Master-Control afin d’éviter une corruption du système pouvant être causée par l’opération de chargement. En cas de problème, vous pouvez utiliser le fichier de sauvegarde pour restaurer le système du robot.
Sauvegarde
-
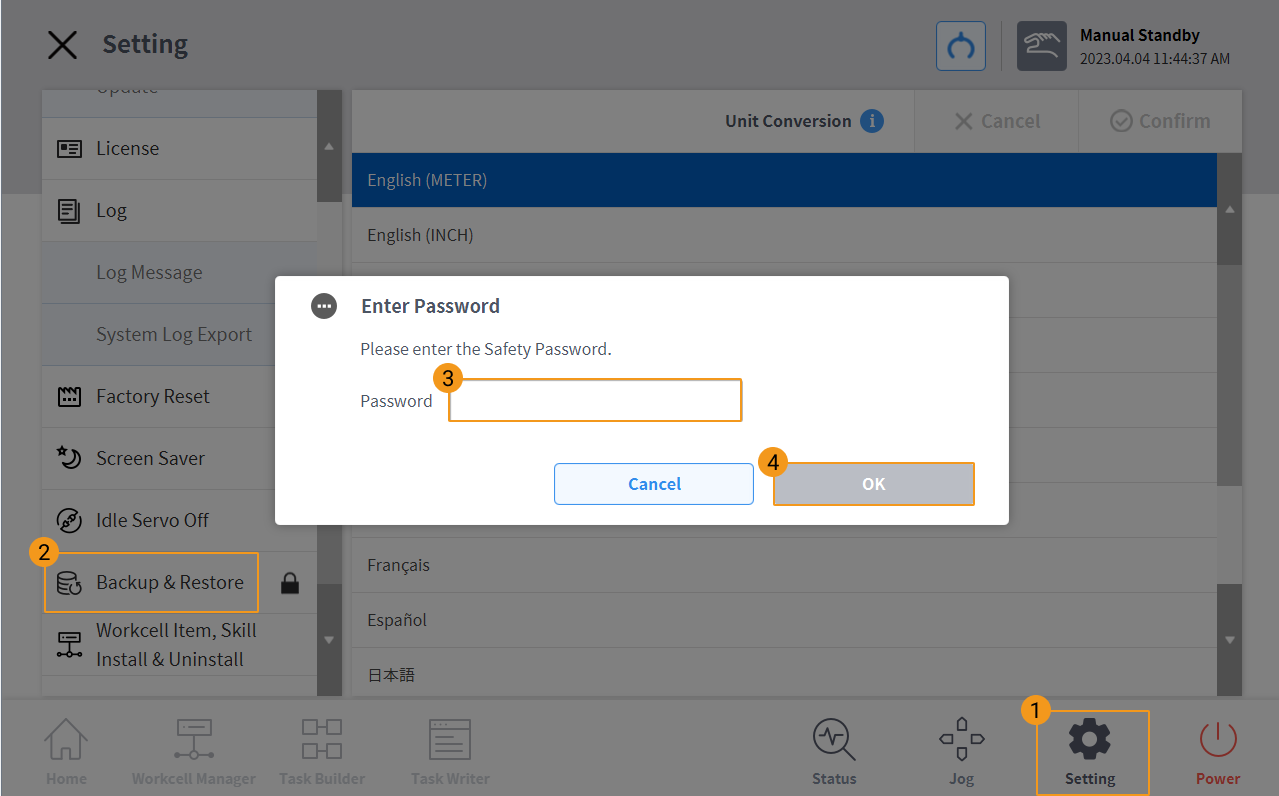
Sur la console d’enseignement, appuyez sur Paramètres dans le panneau inférieur, puis sélectionnez Sauvegarde & Restauration dans le panneau de gauche. Une fenêtre Saisir le mot de passe s’affichera. Saisissez ensuite le mot de passe et appuyez sur OK. Le mot de passe par défaut est admin.
-
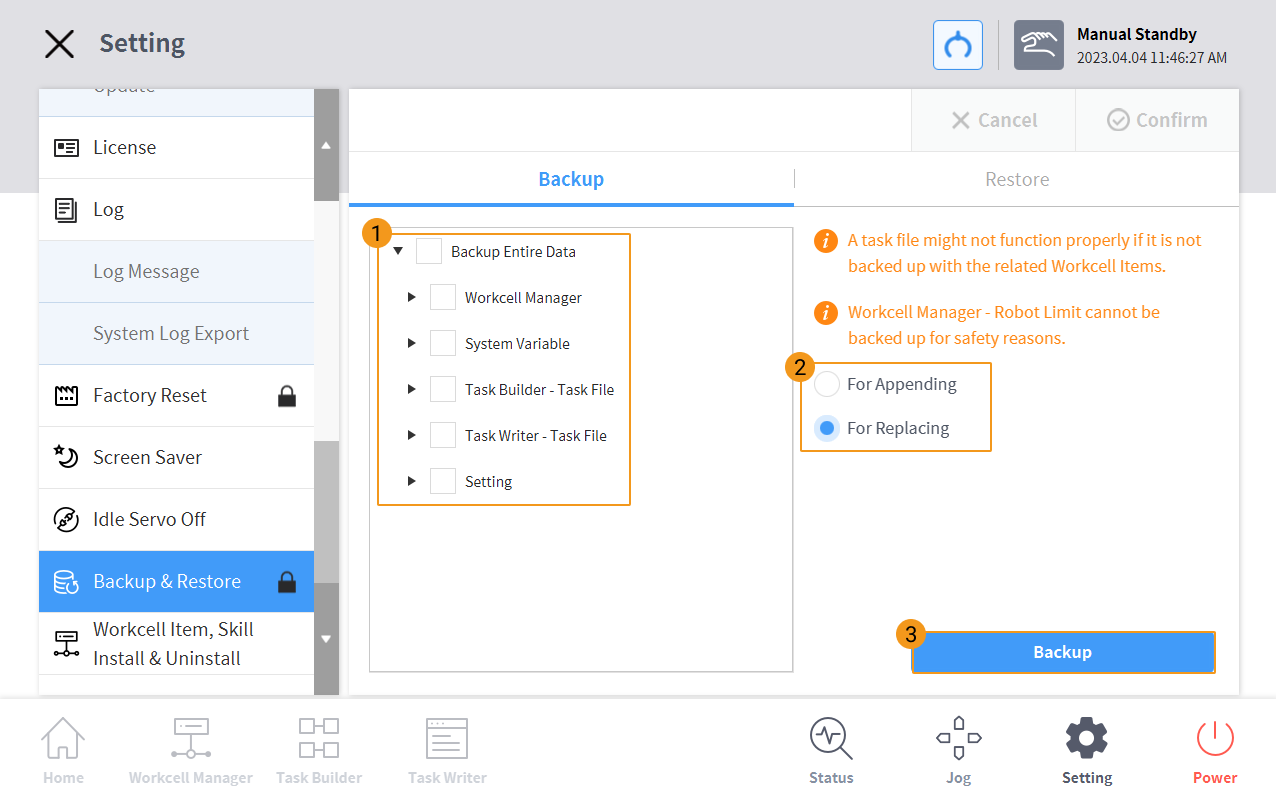
Dans l’onglet Sauvegarde, sélectionnez les éléments à sauvegarder, choisissez Pour remplacement ou Pour ajout, puis appuyez sur Sauvegarder.
-
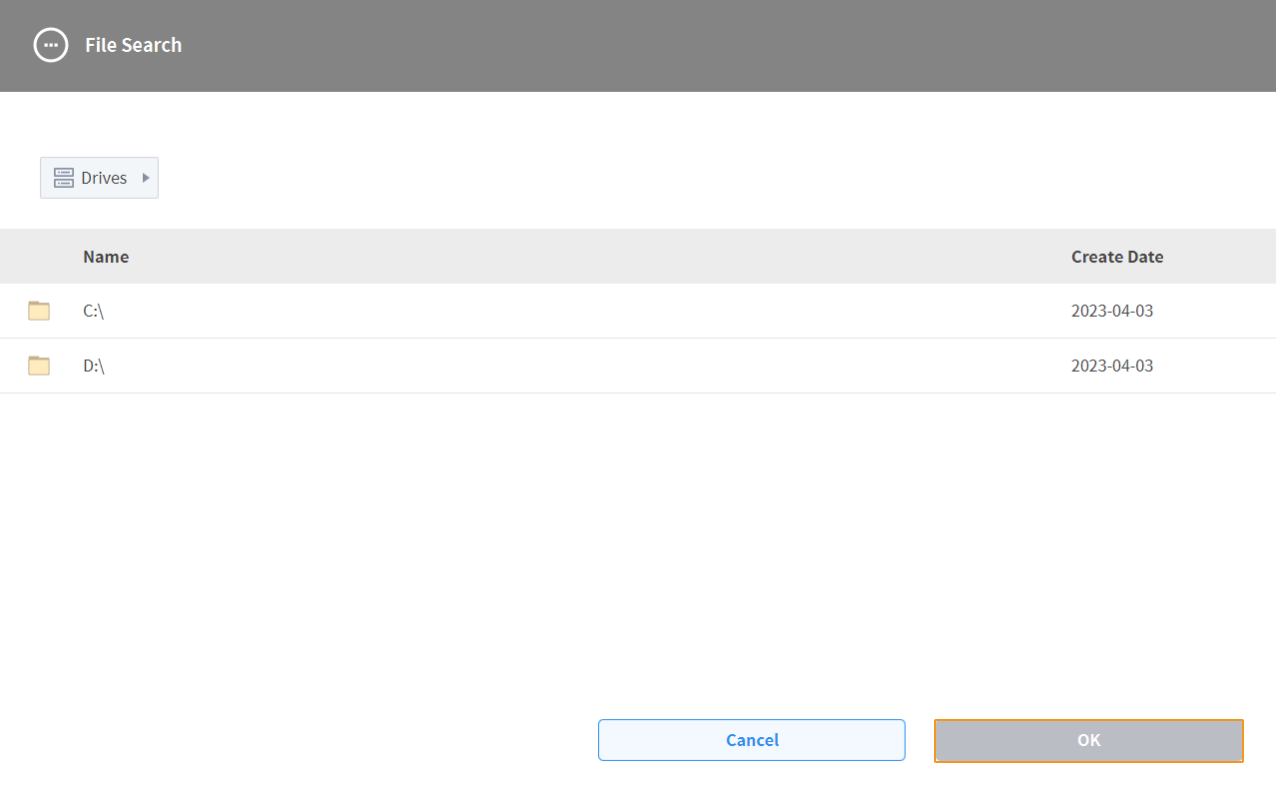
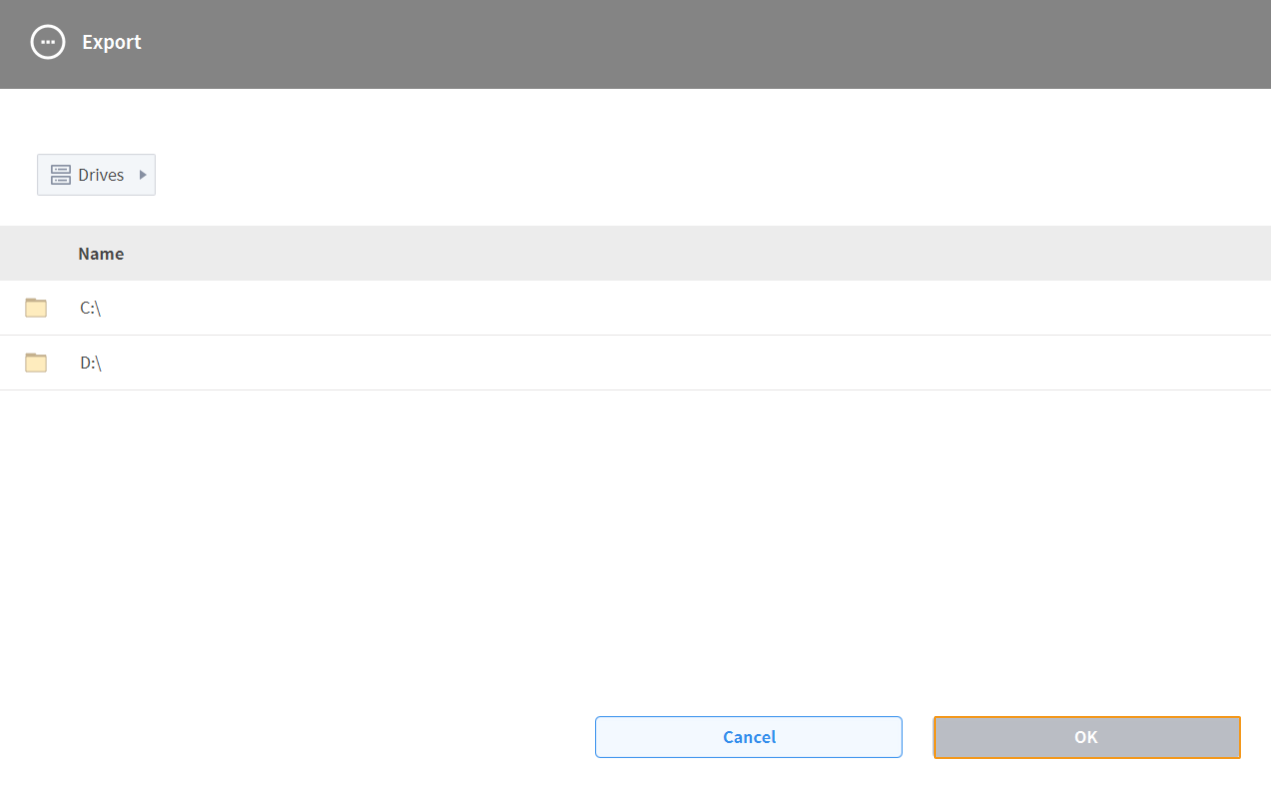
Dans la fenêtre contextuelle, sélectionnez le répertoire où vous souhaitez stocker les fichiers de sauvegarde, puis appuyez sur OK.
Restauration
-
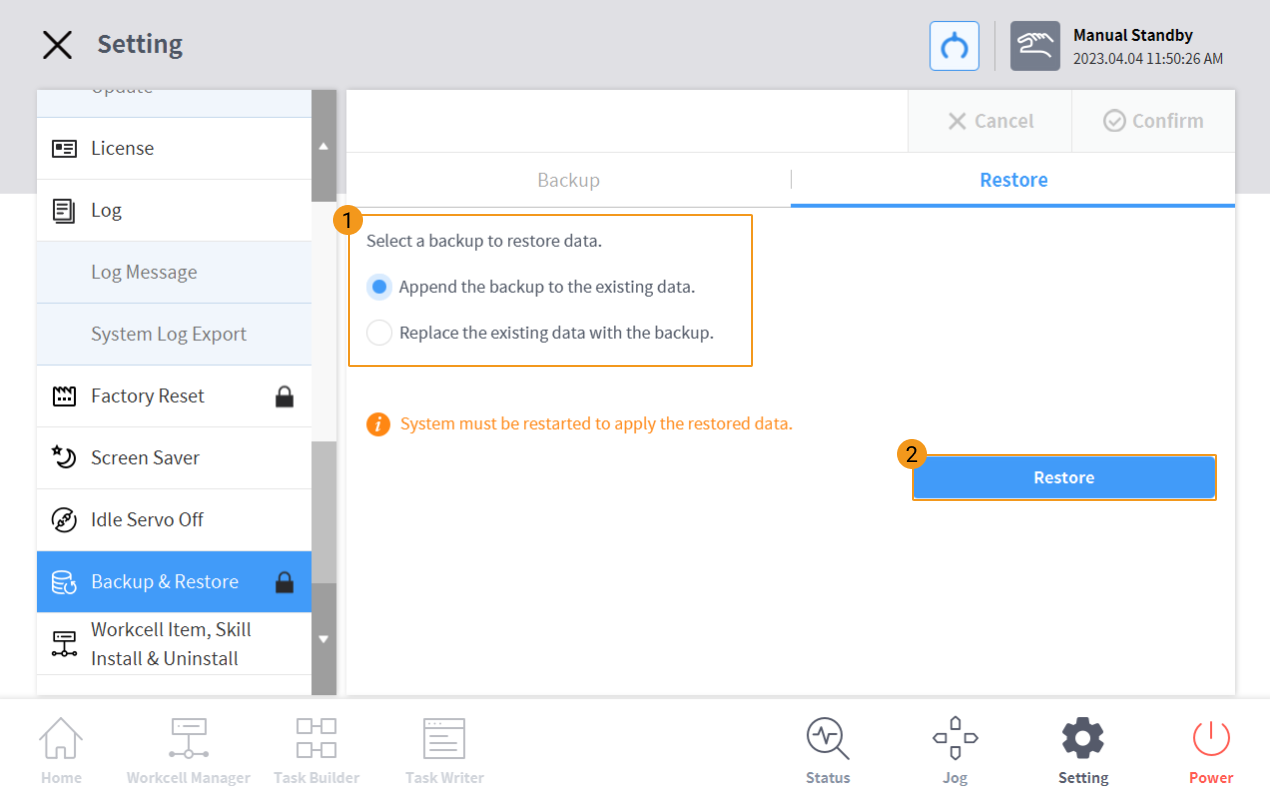
Dans l’onglet Restauration, sélectionnez une sauvegarde pour restaurer les données. Veuillez vous assurer que l’option que vous choisissez correspond à l’option de sauvegarde (Pour remplacement ou Pour ajout) que vous avez sélectionnée. Ensuite, appuyez sur Restaurer.
-
Sélectionnez le fichier de sauvegarde dans la fenêtre contextuelle et appuyez sur OK.