E/S non liées à une entrée-sortie matérielle..mm_control-
Problème
Lors de l’exécution du programme principal de contrôle sur le robot STAUBLI, l’erreur suivante se produit:
Erreur d’exécution VAL 3. E/S non liées à une entrée-sortie matérielle..mm_control-.
Causes possibles
Les deux raisons suivantes peuvent provoquer l’erreur ci-dessus.
-
Paramètres de la carte d’E/S incorrects.
-
Paramètres SIO incorrects.
Solutions
| Si les paramètres d’E/S restent incorrects, vous pouvez envisager de supprimer tout le contenu lié aux E/S du programme et de ne contrôler que les mouvements du robot sans utiliser d’E/S. |
-
Cause 1:
-
Si le robot n’est pas connecté à la carte d’E/S EtherCat Term_1_(D24403000), supprimez le code lié aux E/S dans le fichier mm_control.dtx, en particulier le code suivant.
Les fichiers mm_control.dtx et statusServer.pgx se trouvent au chemin Communication Component/Robot_Server/Robot_FullControl/staubli/mm_controldans le répertoire d’installation de Mech-Vision et Mech-Viz.<Data name="exDO" access="private" xsi:type="array" type="dio" size="4"> <Value key="0" link="J206_EtherCAT\Term_1_(D24403000)\%Q0" /> <Value key="1" link="J206_EtherCAT\Term_1_(D24403000)\%Q1" /> <Value key="2" link="J206_EtherCAT\Term_1_(D24403000)\%Q2" /> <Value key="3" link="J206_EtherCAT\Term_1_(D24403000)\%Q3" /> </Data> <Data name="exDI" access="private" xsi:type="array" type="dio" size="8"> <Value key="0" link="J206_EtherCAT\Term_1_(D24403000)\%I0" /> <Value key="1" link="J206_EtherCAT\Term_1_(D24403000)\%I1" /> <Value key="2" link="J206_EtherCAT\Term_1_(D24403000)\%I2" /> <Value key="3" link="J206_EtherCAT\Term_1_(D24403000)\%I3" /> <Value key="4" link="J206_EtherCAT\Term_1_(D24403000)\%I4" /> <Value key="5" link="J206_EtherCAT\Term_1_(D24403000)\%I5" /> <Value key="6" link="J206_EtherCAT\Term_1_(D24403000)\%I6" /> <Value key="7" link="J206_EtherCAT\Term_1_(D24403000)\%I7" /> </Data>En même temps, modifiez les valeurs de statusNum[7] et statusNum[8] dans le fichier statusServer.pgx. Le code suivant montre les valeurs mises à jour.
statusNum[7]=0 statusNum[8]=0 -
Si le robot utilise un autre modèle de carte d’E/S, veuillez la configurer conformément au manuel officiel du robot. Assurez-vous que la carte d’E/S fonctionne correctement. Ensuite, modifiez les informations de lien exDO et exDI dans le fichier mm_control.dtx en fonction des noms réels des dispositifs d’E/S.
<Data name="exDO" access="private" xsi:type="array" type="dio" size="4"> <Value key="0" link="J206_EtherCAT\Term_1_(D24403000)\%Q0" /> <Value key="1" link="J206_EtherCAT\Term_1_(D24403000)\%Q1" /> <Value key="2" link="J206_EtherCAT\Term_1_(D24403000)\%Q2" /> <Value key="3" link="J206_EtherCAT\Term_1_(D24403000)\%Q3" /> </Data> <Data name="exDI" access="private" xsi:type="array" type="dio" size="8"> <Value key="0" link="J206_EtherCAT\Term_1_(D24403000)\%I0" /> <Value key="1" link="J206_EtherCAT\Term_1_(D24403000)\%I1" /> <Value key="2" link="J206_EtherCAT\Term_1_(D24403000)\%I2" /> <Value key="3" link="J206_EtherCAT\Term_1_(D24403000)\%I3" /> <Value key="4" link="J206_EtherCAT\Term_1_(D24403000)\%I4" /> <Value key="5" link="J206_EtherCAT\Term_1_(D24403000)\%I5" /> <Value key="6" link="J206_EtherCAT\Term_1_(D24403000)\%I6" /> <Value key="7" link="J206_EtherCAT\Term_1_(D24403000)\%I7" /> </Data>
-
-
Cause 2:
Vérifiez les paramètres SIO en suivant ces étapes.
-
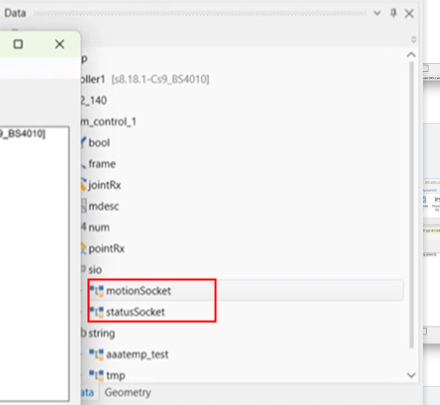
Dans le logiciel SRS (Staubli Robotics Suite), ouvrez la liste Data du projet et vérifiez si les variables motionsocket et statussocket existent sous le nœud sio. Si elles n’existent pas, veuillez les ajouter manuellement. Étapes: double-cliquez sur sio. Dans la fenêtre contextuelle, sélectionnez le type et saisissez le nom de la variable.
-
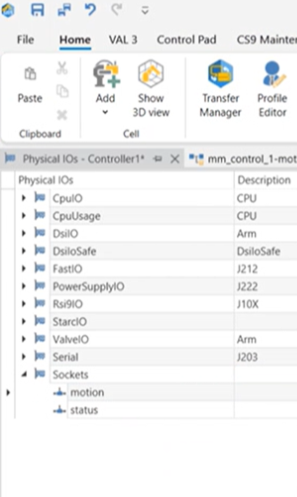
Ouvrez l’interface des E/S physiques et vérifiez si motion et status existent sous le nœud Sockets. S’ils n’existent pas, veuillez les ajouter manuellement. Étapes: cliquez avec le bouton droit sur le nœud Sockets et sélectionnez le bouton edit board pour ouvrir la boîte de dialogue. Ensuite, cliquez sur le menu déroulant à côté de l’icône + et sélectionnez TCP/IP Server. Ajoutez motion et status dans l’ordre. Le numéro de port pour motion doit être défini sur 1111, et pour status, sur 2222.
-
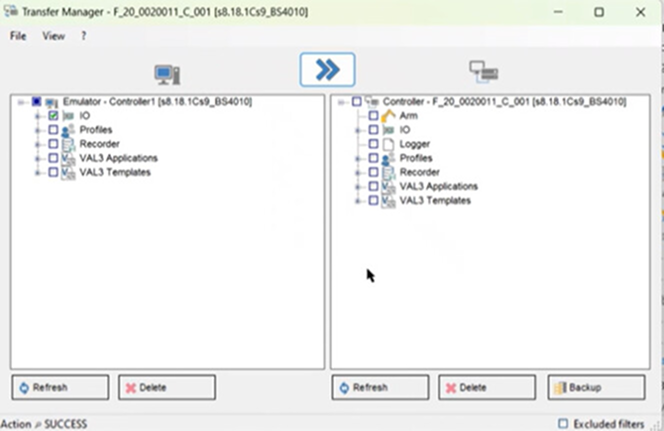
Importez les paramètres d’E/S dans le contrôleur à l’aide du gestionnaire de transfert.
-
Redémarrez le contrôleur.
-