Configurer la communication de l’Interface Standard
Ce guide explique comment configurer la communication de l’Interface Standard avec un robot Techman (TM).
Préparation
Avant d’effectuer toute opération sur le robot TM, veuillez vous assurer que les exigences suivantes sont remplies :
-
La version du logiciel du contrôleur (TMflow) est 1.84.
La version 1.84 est celle utilisée pour l’adaptation. Pour les autres versions, vous pouvez vous référer à ce guide pour l’opération. En cas de problème, veuillez contacter le support technique de Mech-Mind. -
L’adresse IP du robot, par exemple 192.168.2.10, a été obtenue.
Prendre le contrôle du robot
Il existe deux façons de contrôler le robot, et vous pouvez choisir l’une ou l’autre selon la situation réelle.
Contrôler le robot via le contrôleur
-
Connectez l’écran, le clavier et la souris au contrôleur via les ports USB et HDMI du contrôleur, selon le cas.
-
Cliquez sur
 , et attendez que l’ID du robot correspondant apparaisse dans la fenêtre.
, et attendez que l’ID du robot correspondant apparaisse dans la fenêtre.
-
Connectez le robot de l’une des manières suivantes :
-
Double-cliquez sur l’icône du robot
-
Double-cliquez sur l’ID du robot
-
Double-cliquez sur l’adresse IP du robot
-
-
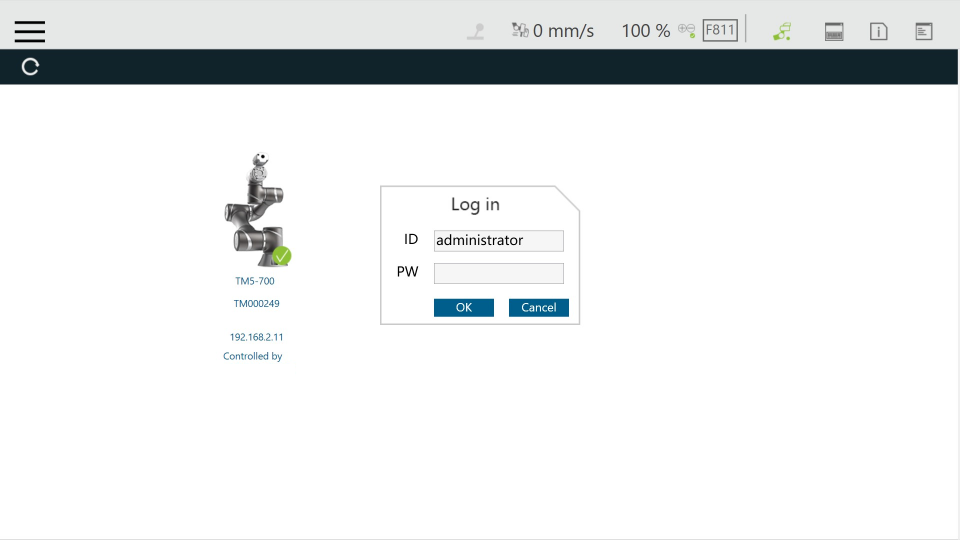
Saisissez votre ID et votre mot de passe dans la fenêtre de connexion, puis cliquez sur OK. Vous pouvez utiliser l’ID par défaut administrator pour vous connecter sans mot de passe.
-
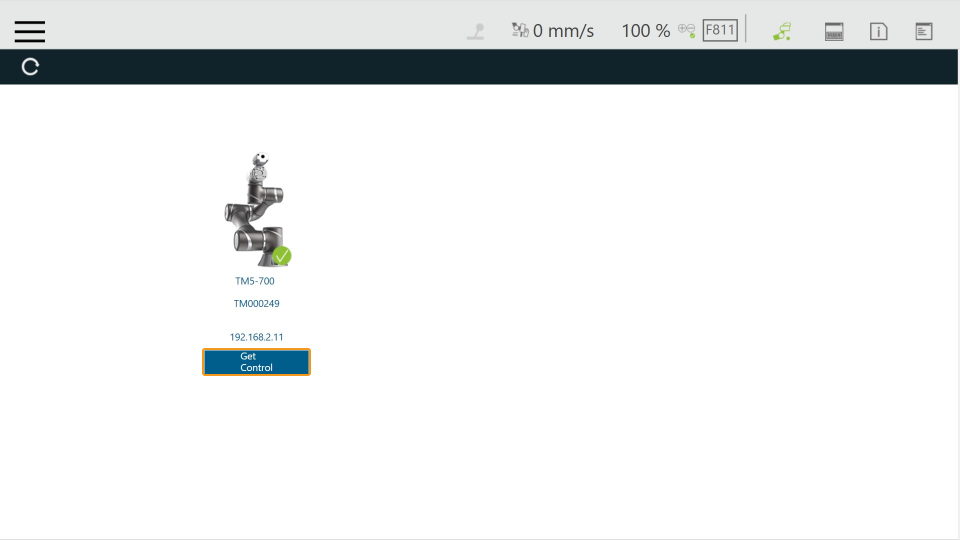
Cliquez sur Prendre le contrôle pour contrôler le robot.
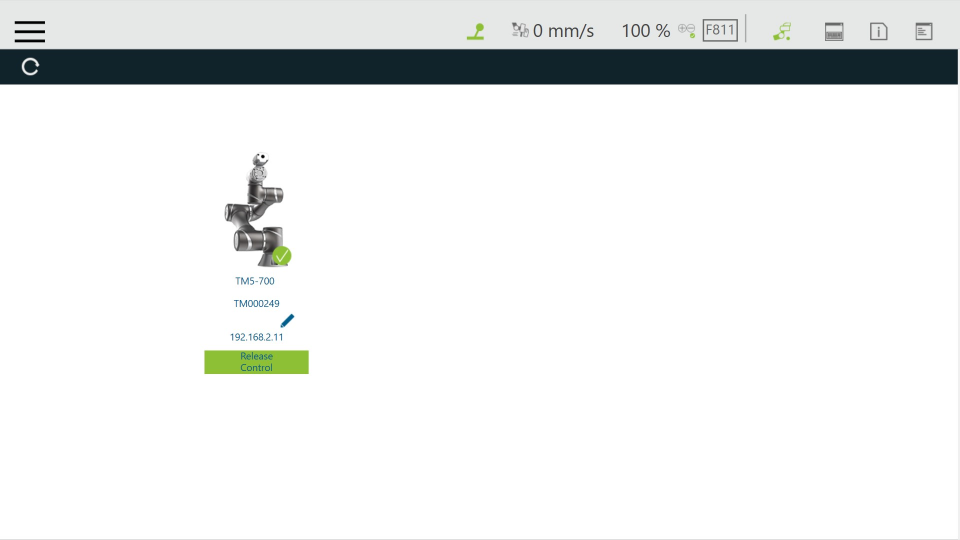
Si le contrôle du robot réussit, la fenêtre sera comme illustré ci-dessous.
Contrôler le robot via l’IPC
Connecter le matériel
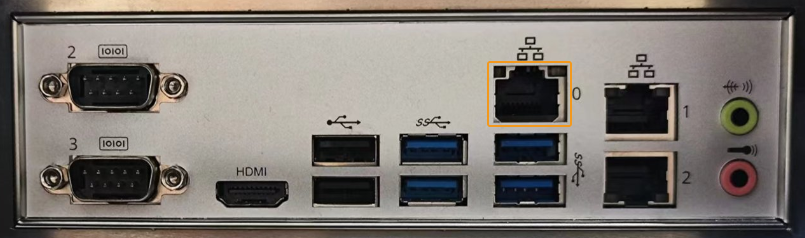
Branchez le câble Ethernet sur le port LAN du contrôleur du robot pour le connecter à l’IPC.
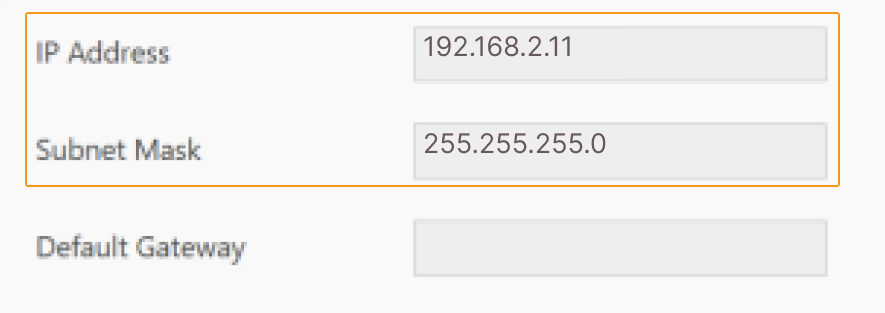
Définir l’adresse IP de l’IPC
Dans l’IPC, définissez l’adresse IP de l’IPC.
| Définissez les adresses IP de l’IPC et du robot dans le même sous-réseau. Sinon, la connexion au robot échouera. |
Contrôler le robot avec l’IPC
-
Téléchargez et installez le logiciel TMflow sur votre IPC depuis le site Web de Techman Robot.
Si la marque du robot est Omron TM, veuillez télécharger TMFlow 1.8.4 ou supérieur depuis le site officiel d’Omron et terminer le processus de mise à niveau. -
Ouvrez TMflow, cliquez sur
, et attendez que l’ID du robot correspondant apparaisse dans la fenêtre.
-
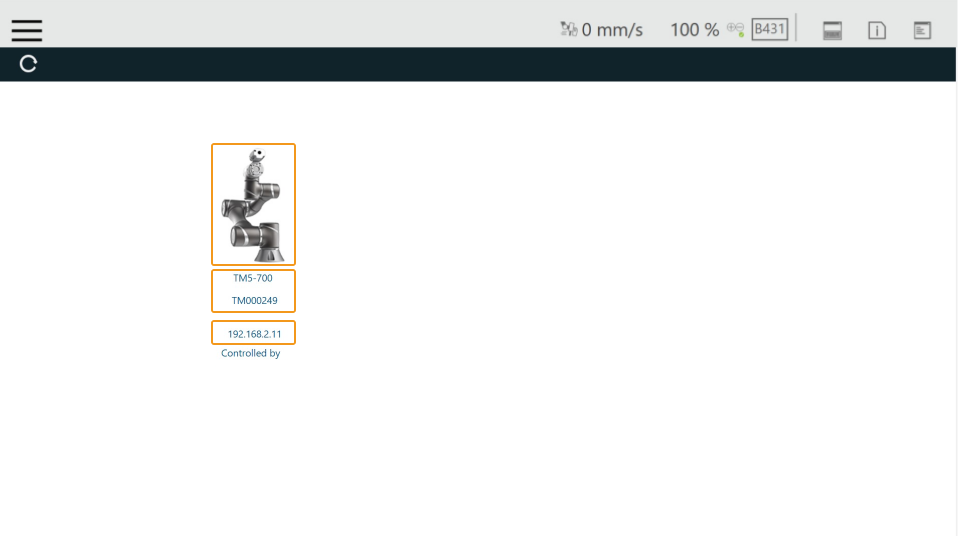
Connectez le robot de l’une des manières suivantes :
-
Double-cliquez sur l’icône du robot
-
Double-cliquez sur l’ID du robot
-
Double-cliquez sur l’adresse IP du robot
-
-
Saisissez votre ID et votre mot de passe dans la fenêtre de connexion, puis cliquez sur OK. Vous pouvez utiliser l’ID par défaut administrator pour vous connecter sans mot de passe.
-
Cliquez sur Prendre le contrôle pour contrôler le robot.
Si le contrôle du robot réussit, la fenêtre sera comme illustré ci-dessous.
Configurer la configuration de communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
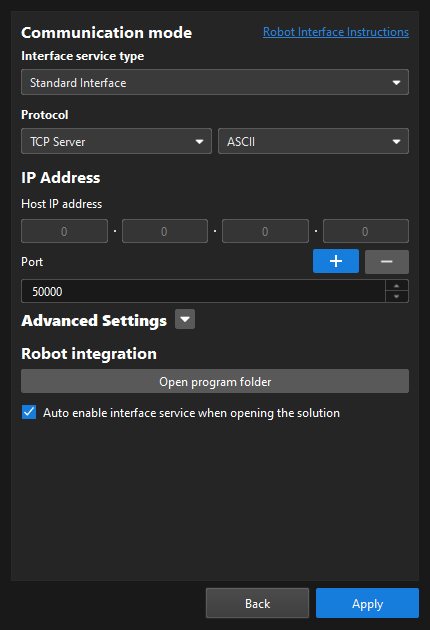
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
Sous Intégration du robot, cliquez sur Ouvrir le dossier du programme.
Les fichiers nécessaires au chargement ultérieur seront copiés depuis ce dossier. Ne fermez pas ce dossier. -
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers du programme
L’exemple ci-dessous utilise un IPC pour charger les fichiers du programme. La méthode pour charger les fichiers du programme avec un contrôleur est similaire.
Préparer les fichiers du programme
-
Branchez la clé USB sur le port USB de l’IPC.
-
Renommez la clé USB en TMROBOT, sinon la clé USB ne pourra pas être reconnue par le contrôleur du robot.
-
Dans le dossier du programme ouvert (le dossier
TM_Plugin_and_Play), ouvrez le dossierTMFlowet copiez le dossierTM_Exportsur la clé USB.Vous pouvez également trouver le dossier du programme dans le chemin
Communication Component/Robot_Interface/Robot_Plugin/TM_Plugin_and_Playdu répertoire d’installation de Mech-Vision et Mech-Viz. -
Branchez la clé USB contenant les fichiers du programme sur le port USB du contrôleur du robot.
Sauvegarder les fichiers système du robot
Il est recommandé de sauvegarder les fichiers système du robot avant de charger les fichiers du programme de l’Interface Standard, afin d’éviter toute corruption du système pouvant être causée par l’opération de chargement. En cas de problème, vous pouvez utiliser le fichier de sauvegarde pour restaurer le système du robot.
-
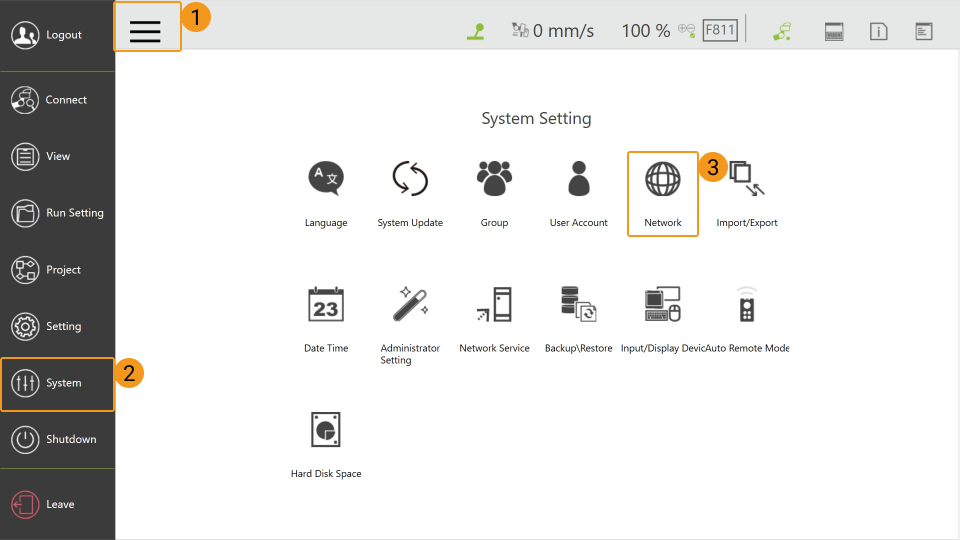
Ouvrez le logiciel TMflow, cliquez sur l’icône
 dans le coin supérieur gauche de la fenêtre, puis sélectionnez .
dans le coin supérieur gauche de la fenêtre, puis sélectionnez .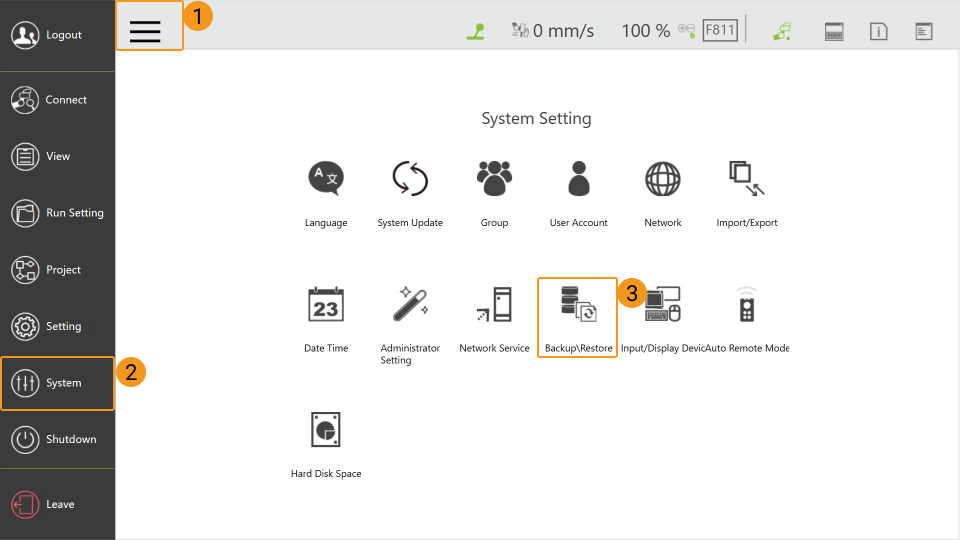
-
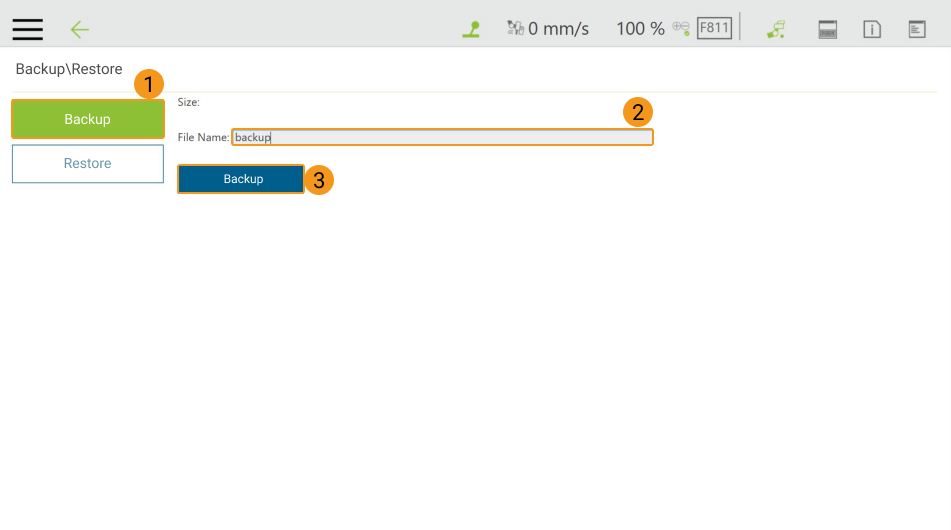
Cliquez sur Sauvegarder, saisissez un nom de fichier pour le fichier de sauvegarde, puis cliquez à nouveau sur Sauvegarder.
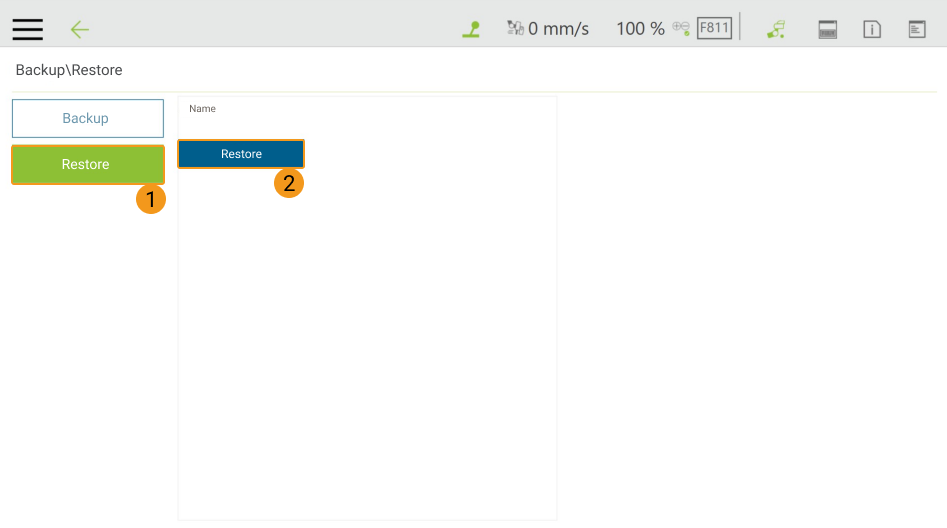
Si vous devez restaurer le système du robot avec le fichier de sauvegarde, cliquez sur Restaurer puis sur Restaurer.
Charger les fichiers sur le robot
-
Avant de charger les fichiers sur le robot, veuillez appuyer et maintenir le bouton
M/Asur le Robot Stick pour passer le robot en mode Manuel (le voyant vert Manuel est allumé). Veuillez ignorer cette étape si le robot est déjà en mode Manuel.
-
Ouvrez le logiciel TMflow, cliquez sur
puis sélectionnez .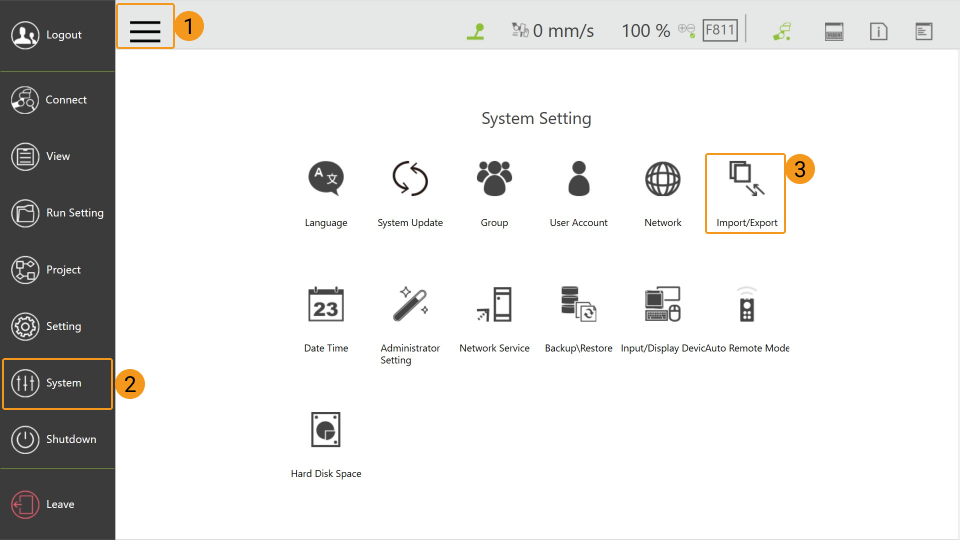
-
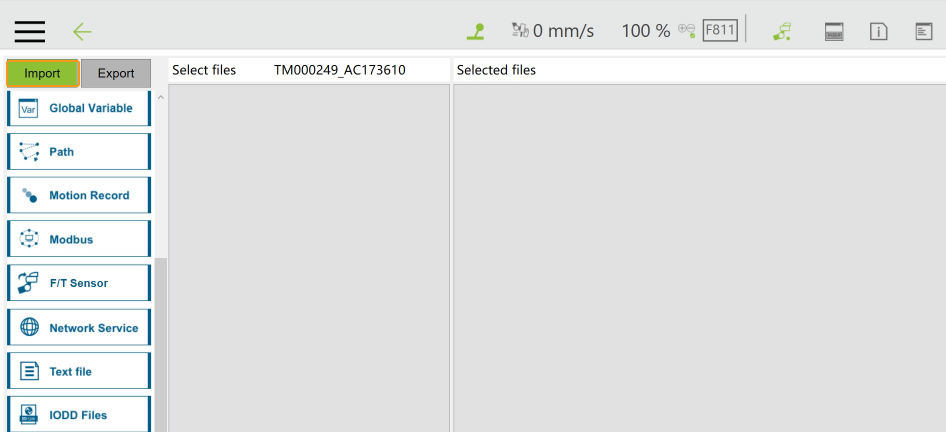
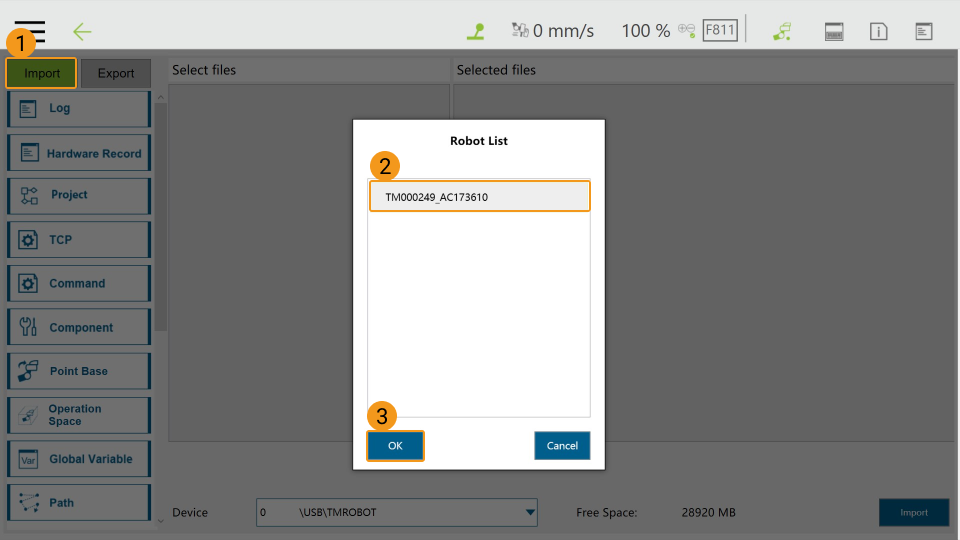
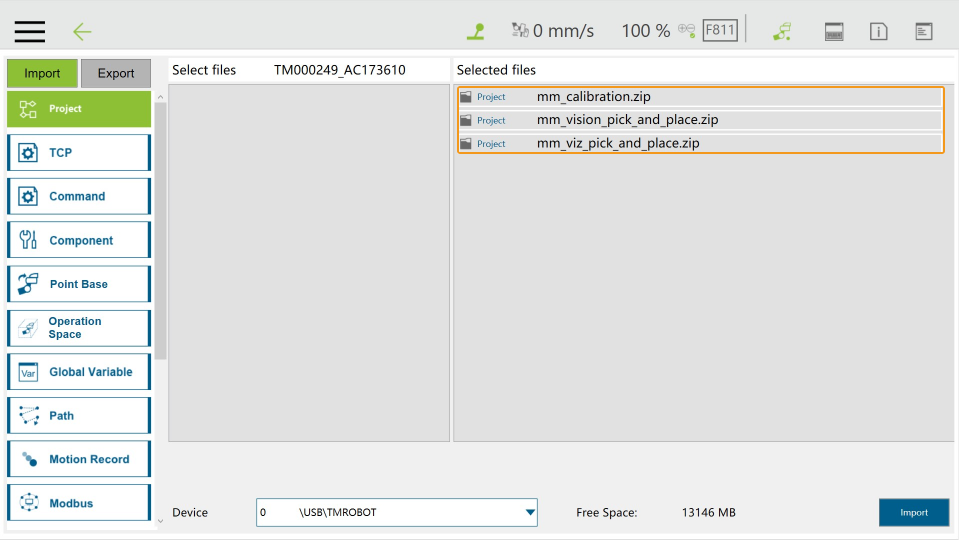
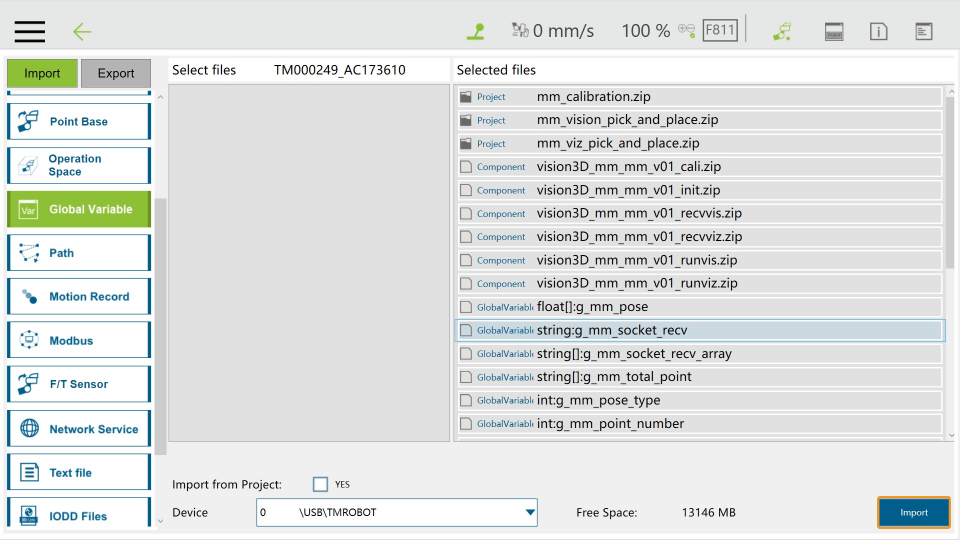
Cliquez sur Importer dans le coin supérieur gauche.
-
Sélectionnez le fichier de programme TM000249_AC173610 dans la fenêtre contextuelle Liste des robots et cliquez sur OK.
-
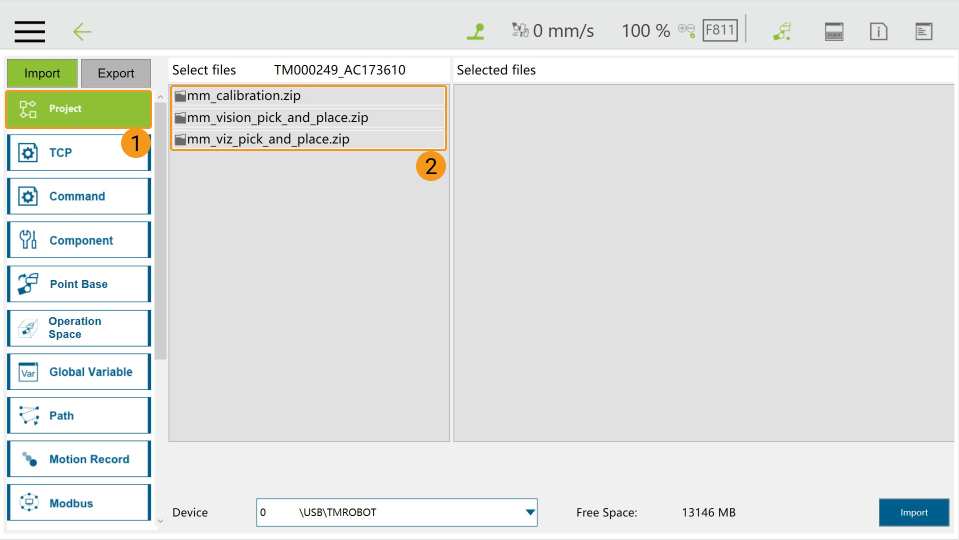
Cliquez sur Projet, et sélectionnez successivement les trois fichiers dans le panneau Sélectionner des fichiers, puis ils apparaîtront dans le panneau Fichiers sélectionnés à droite.
-
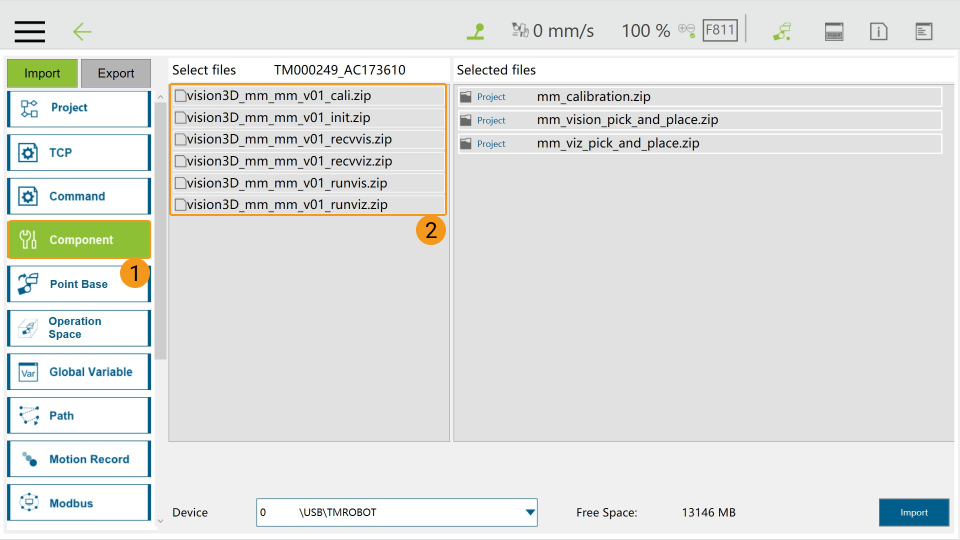
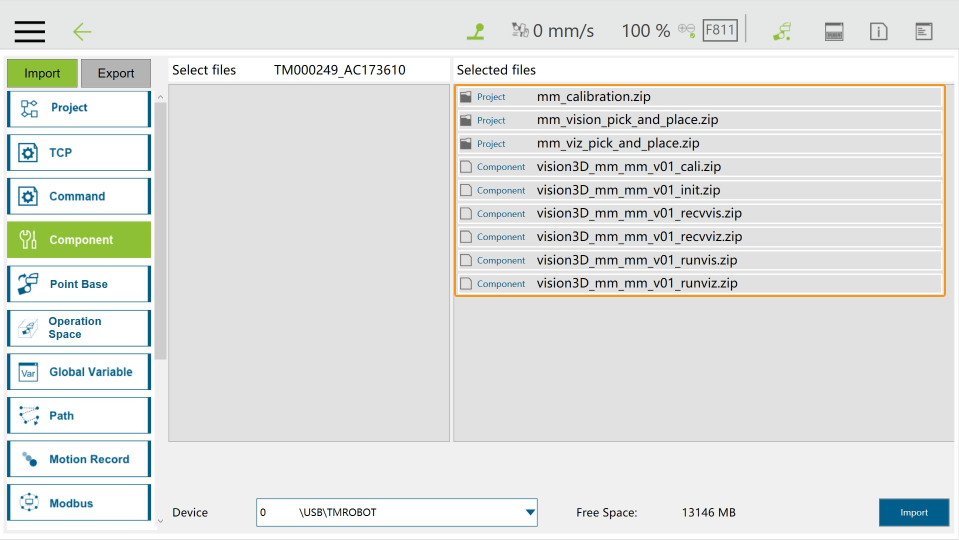
Cliquez sur Composant, et sélectionnez successivement les six fichiers dans le panneau Sélectionner des fichiers, puis ils apparaîtront dans le panneau Fichiers sélectionnés à droite.
-
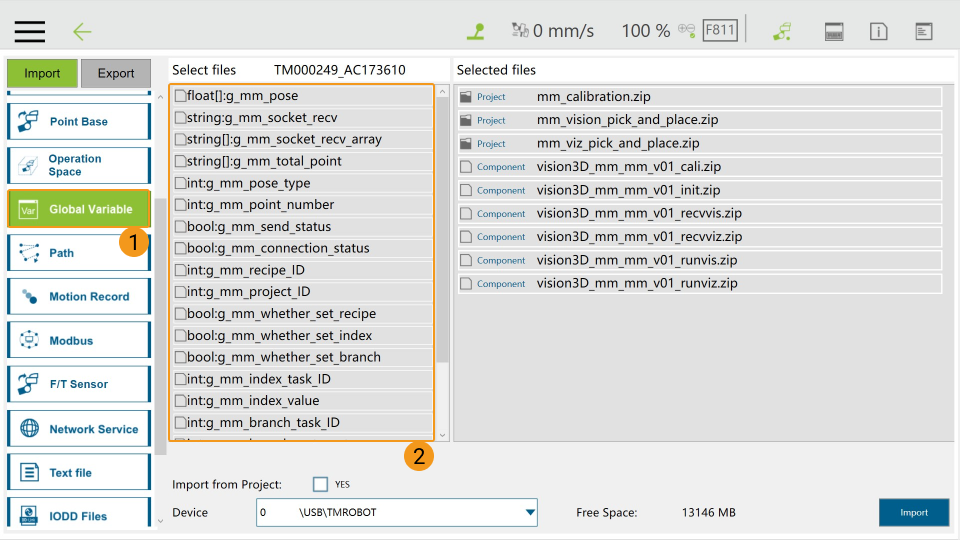
Cliquez sur Variable globale, et sélectionnez successivement tous les fichiers dans le panneau Sélectionner des fichiers, puis ils apparaîtront dans le panneau Fichiers sélectionnés à droite.
-
Cliquez sur Importer dans le coin inférieur droit de la fenêtre, puis cliquez sur OK dans la fenêtre contextuelle une fois l’import terminé.
-
Cliquez sur
, puis sélectionnez .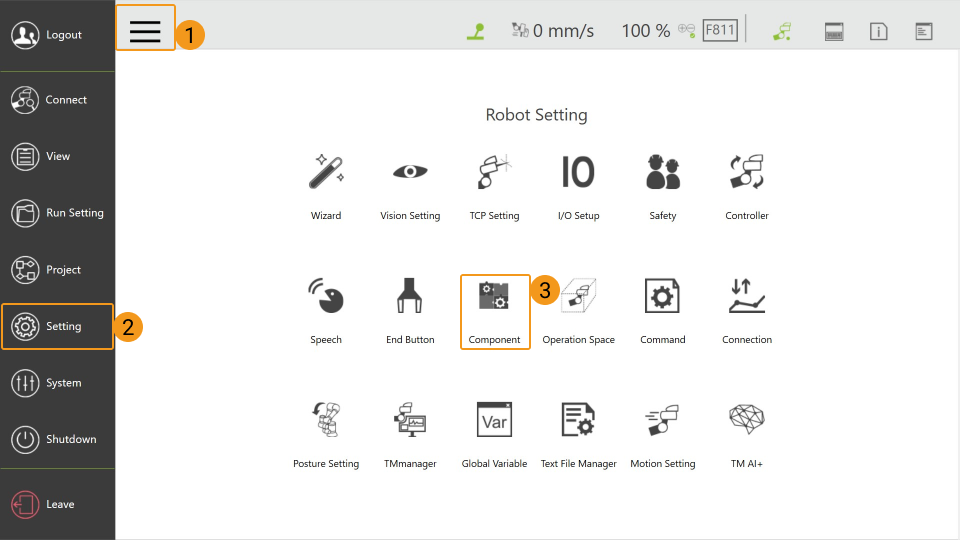
-
Sélectionnez tous les composants et cliquez sur Enregistrer.

-
Débranchez la clé USB de l’IPC après avoir terminé les étapes ci-dessus.
Tester la connexion du robot
-
Cliquez sur
et sélectionnez Projet pour ouvrir la fenêtre ci-dessous.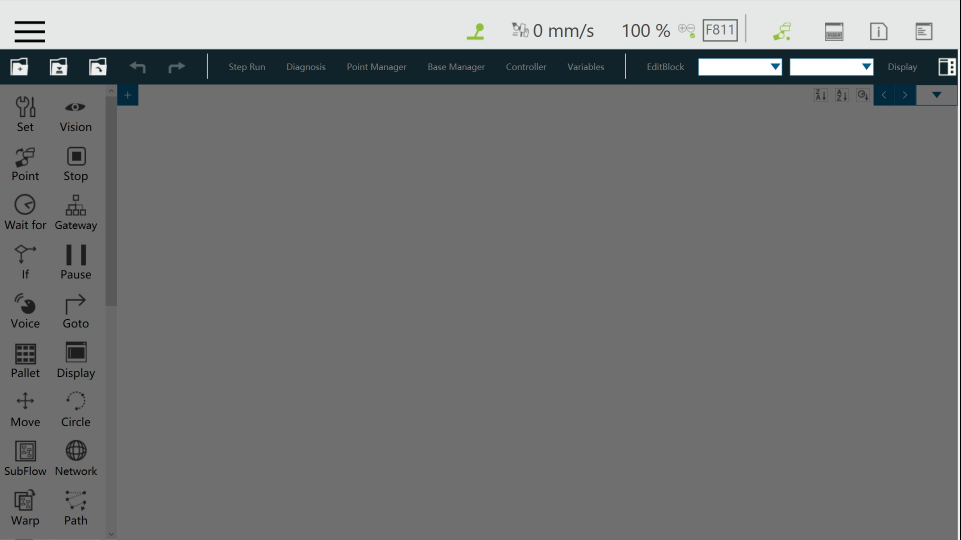
-
Cliquez sur l’icône
 dans le coin supérieur gauche de la fenêtre, saisissez un nom pour le projet dans la fenêtre contextuelle, puis cliquez sur OK.
dans le coin supérieur gauche de la fenêtre, saisissez un nom pour le projet dans la fenêtre contextuelle, puis cliquez sur OK.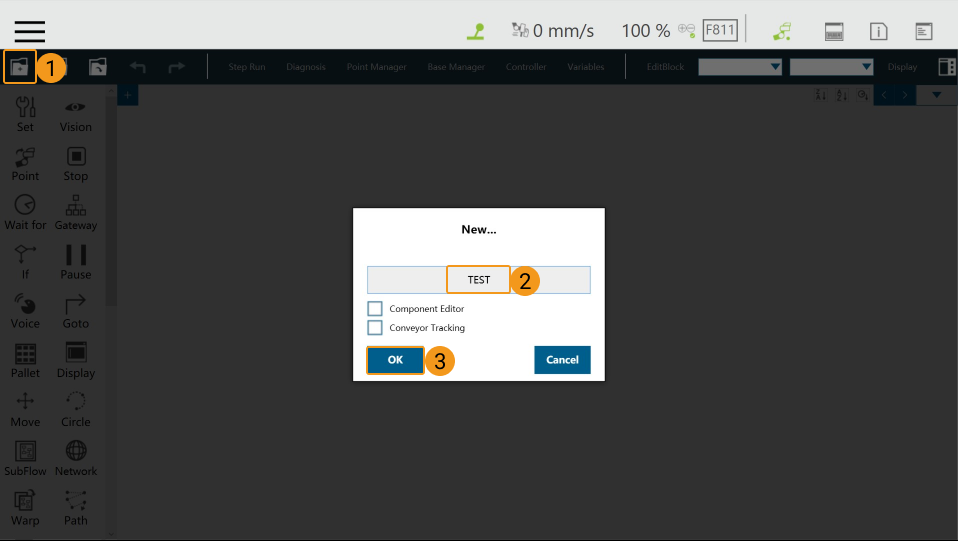
-
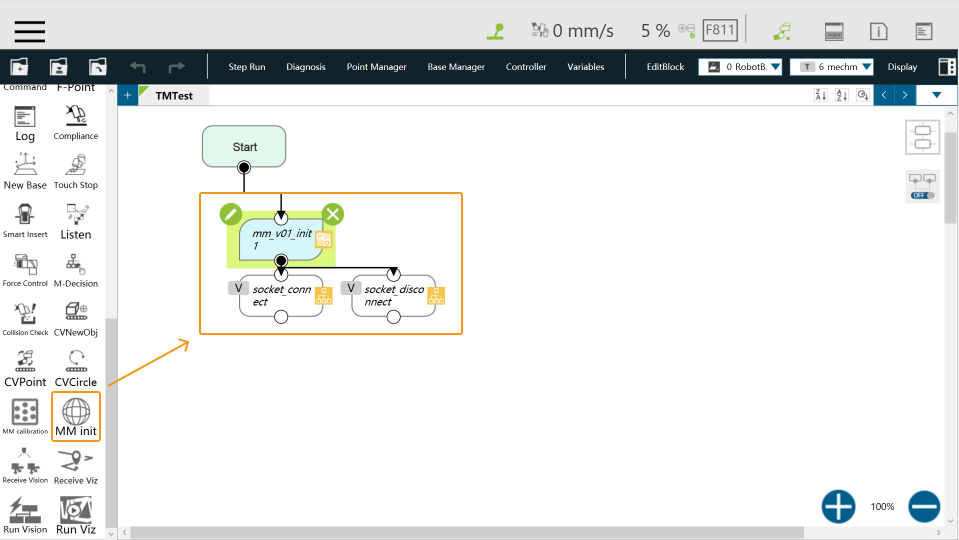
Faites glisser le nœud MM init dans la zone d’édition du flux.
-
Cliquez sur l’icône
 dans le coin supérieur gauche du nœud mm_v01_init1.
dans le coin supérieur gauche du nœud mm_v01_init1.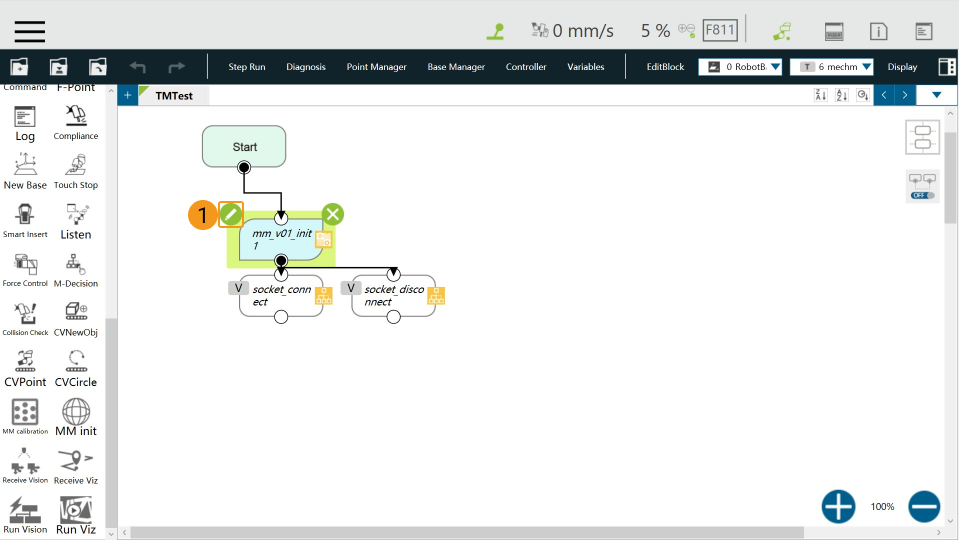
-
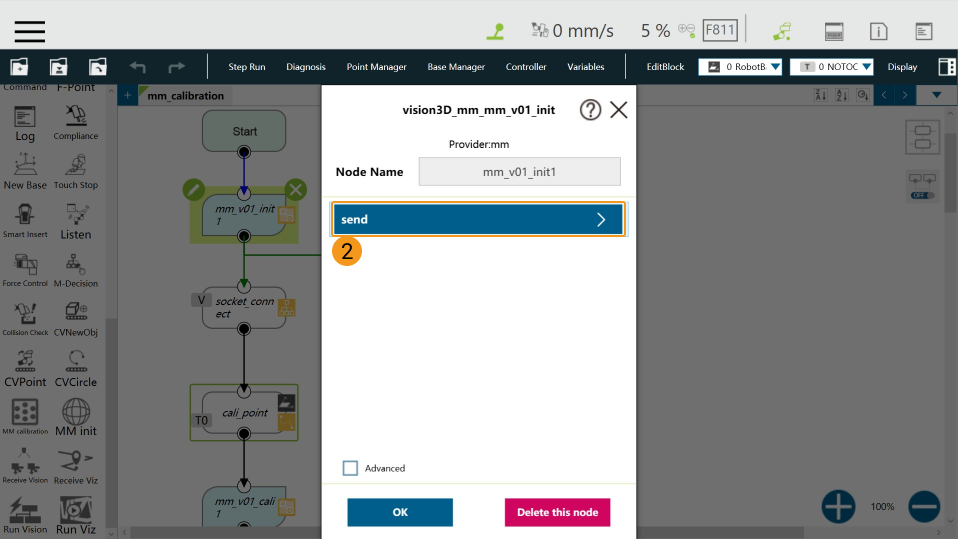
Cliquez sur les icônes une par une comme sur l’image ci-dessous.
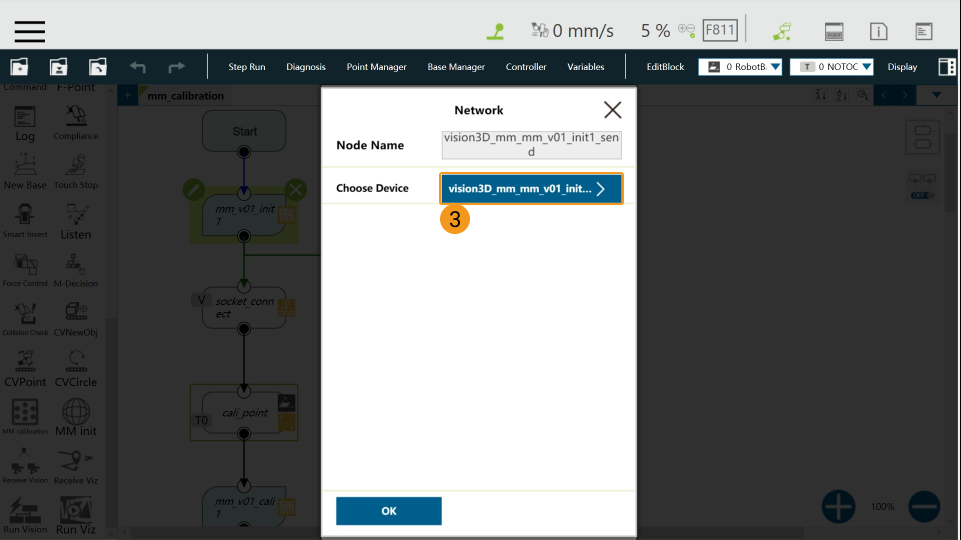
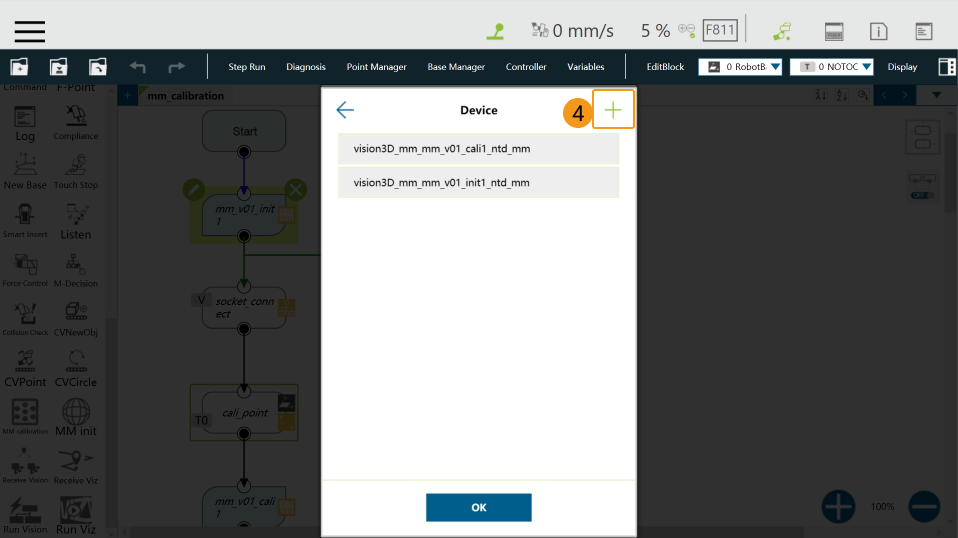
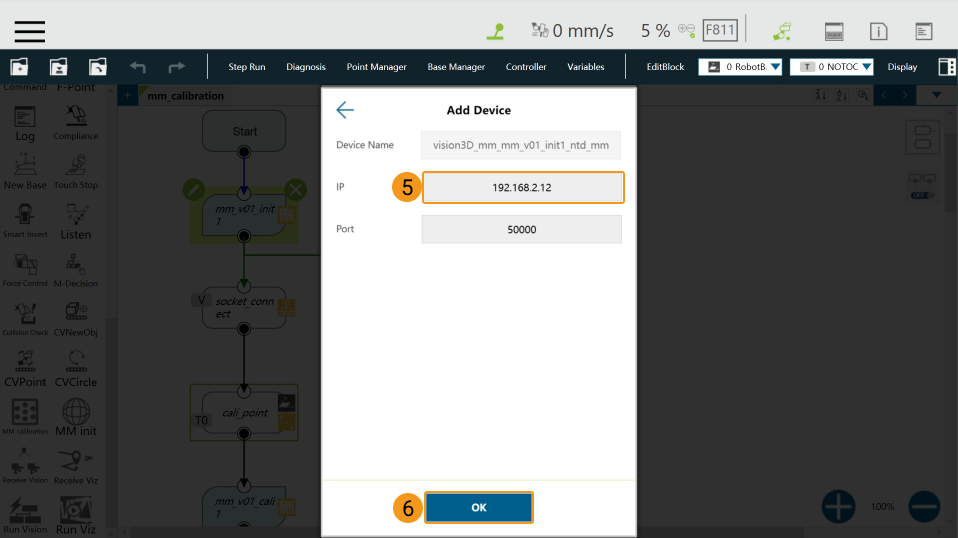
-
Saisissez l’adresse IP de l’IPC dans la fenêtre Ajouter un périphérique et cliquez sur OK.
-
Appuyez sur le bouton
M/Adu Robot Stick jusqu’à entendre un bip, indiquant que le mode Manuel a été désactivé. Appuyez sur les boutons + - + + - dans l’ordre ; le voyant bleu Auto s’allumera, indiquant que le robot est passé en mode Auto.
-
Ensuite, appuyez sur le bouton
Exécutersur le Robot Stick ; le programme se lancera après trois bips. -
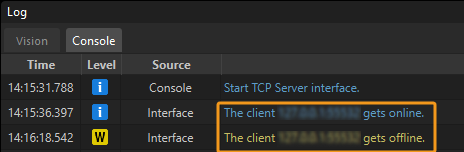
Si la connexion du robot est réussie, l’onglet Console du panneau Journal de Mech-Vision affichera une notification.
-
Une fois le test terminé, appuyez sur le bouton
Arrêtersur le Robot Stick.