Commandes d’interface standard
Les 6 composants d’interface standard disponibles sont les suivants.
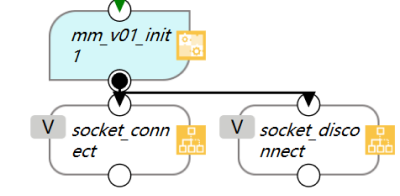
Initialiser la communication (MM init)
Ce composant sert à initialiser la communication réseau et doit être ajouté juste après le nœud de démarrage.
Veuillez vous référer à Configurer l’adresse IP de l’IPC pour modifier l’adresse IP de l’IPC.
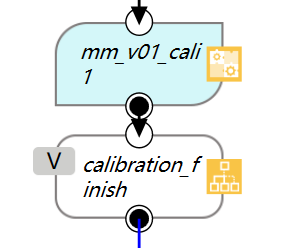
Étalonnage (MM calibration)
Ce composant est utilisé pour l’étalonnage de la caméra. Il définit l’ensemble du processus d’étalonnage de la caméra et ne comporte aucun paramètre ajustable.
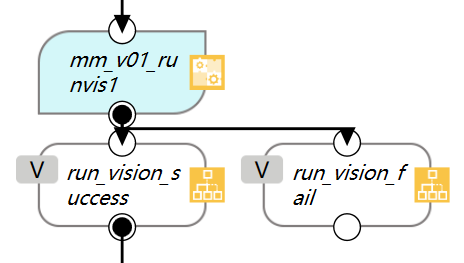
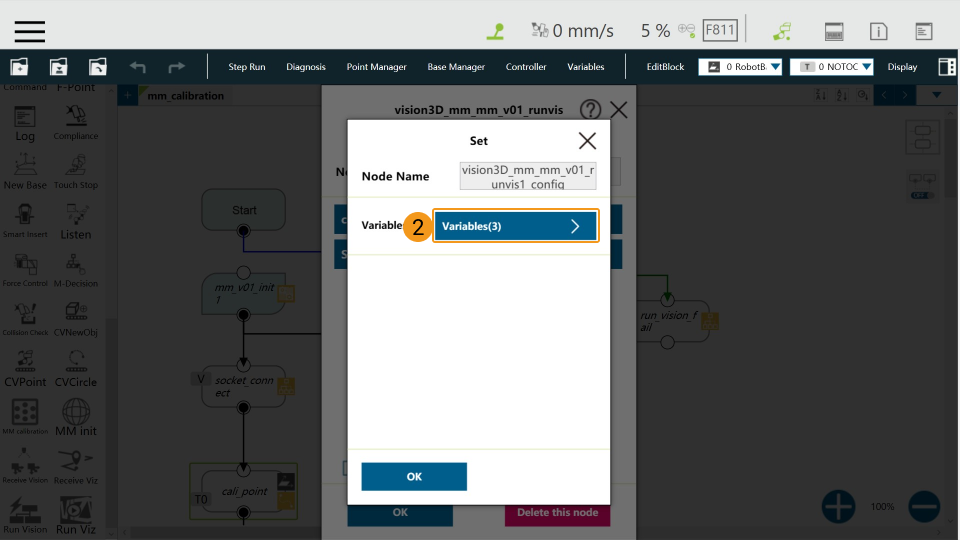
Démarrer le projet Mech-Vision (Run Vision)
Ce composant sert à démarrer le projet Mech-Vision.
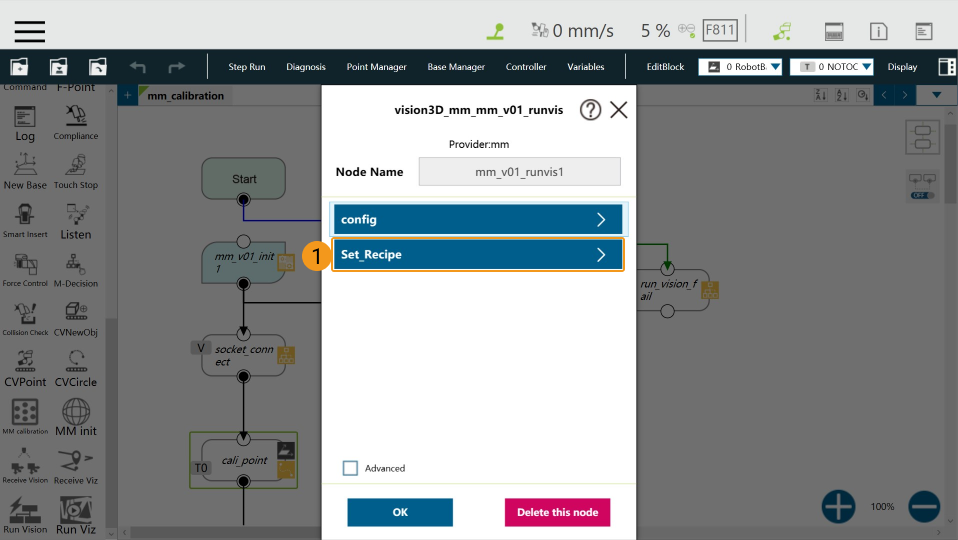
Paramètres
-
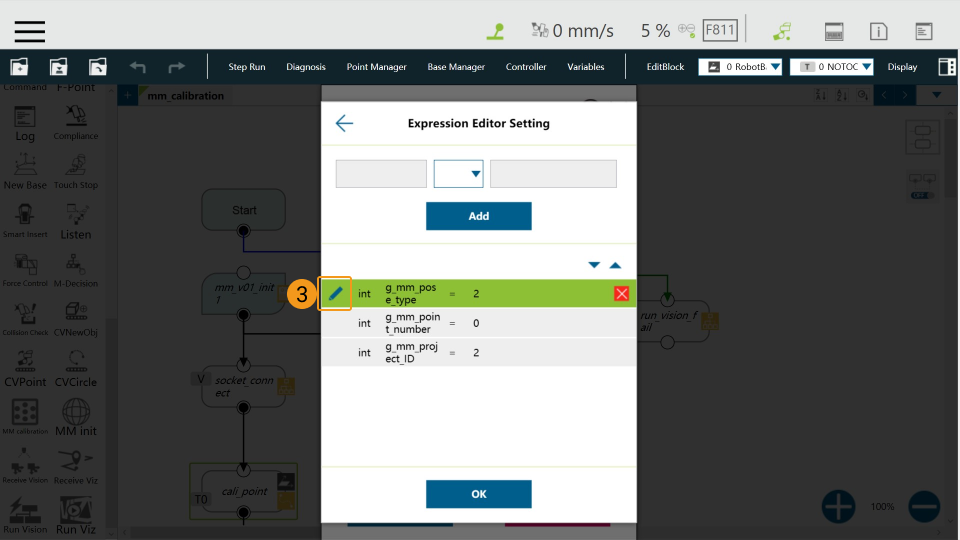
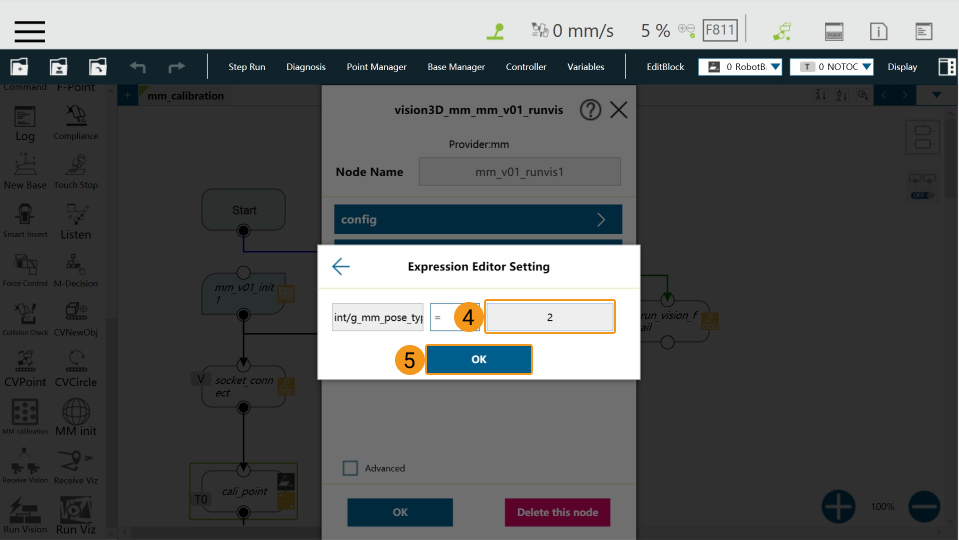
config
-
g_mm_pose_type: Type de pose du robot. Valeurs valides : 1 et 2. Une valeur de 1 indique des positions articulaires. Une valeur de 2 indique le TCP
-
g_mm_point_number: Nombre de points de vision
-
g_mm_project_ID: ID du projet Mech-Vision
-
-
Set_Recipe
-
g_mm_whether_set_recipe: Faut-il changer la recette. true indique qu’il faut changer la recette. false indique qu’il ne faut pas changer la recette
-
g_mm_recipe_ID: ID de recette
-
Démarrer le projet Mech-Viz (Run Viz)
Ce composant sert à démarrer le projet Mech-Viz.
Paramètres
-
Config
-
g_mm_runviz_pose_type: Type de pose du robot. Valeurs valides : 1. Une valeur de 1 indique des positions articulaires
-
g_whether_after_161: Indique si la version de Mech-Vision et Mech-Viz est postérieure à 1.6.1. true indique oui et false indique non
-
-
Set_Branch
-
g_mm_whether_set_branch: Indique s’il faut définir la branche. true indique qu’il faut définir la branche. false indique qu’il ne faut pas définir la branche
-
g_mm_branch_task_ID: ID de l’étape « Branch by Msg »
-
g_mm_branch_out_port: Numéro de port de sortie
-
-
Set_Index
-
g_mm_whether_set_index: Indique s’il faut définir l’index. true indique qu’il faut définir l’index. false indique qu’il ne faut pas définir l’index
-
g_mm_index_task_ID: ID de l’étape de type index
-
g_mm_index_value: Valeur d’index
-
Obtenir la ou les cibles de vision (Receive Vision)
Ce composant sert à obtenir le résultat de vision depuis le projet Mech-Vision correspondant. Le sous-nœud qu’il prend dépend du code d’état reçu.
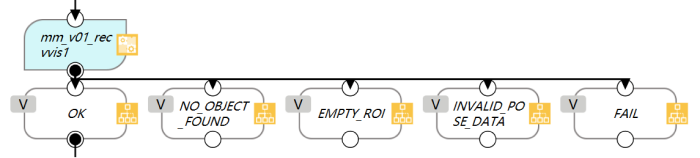
Une fois l’exécution de ce composant terminée, le résultat de vision renvoyé par Mech-Vision sera stocké dans la variable globale g_mm_socket_recv_array sous forme de chaînes. Vous pouvez traiter les données de cette variable selon des exigences spécifiques.
Sous-nœuds et codes d’état correspondants :
-
NO_OBJECT_FOUND : 1002
-
EMPTY_ROI : 1003
-
INVALID_POSE_DATA : 1006
Obtenir le chemin planifié (Receive Viz)
Ce composant sert à obtenir le chemin planifié depuis Mech-Viz.
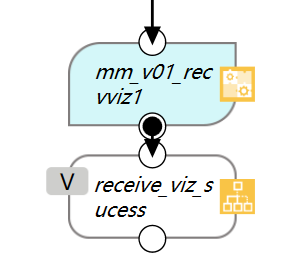
Une fois l’exécution de ce composant terminée, les résultats renvoyés par Mech-Viz seront stockés dans la variable globale g_mm_socket_recv_array sous forme de chaînes. Vous pouvez traiter les données de cette variable selon des exigences spécifiques.
Tous les points de passage sont stockés dans la variable globale g_mm_total_point sous forme de chaînes. Les 6 premiers éléments du tableau représentent le premier point de passage, les éléments 7 à 12 représentent le deuxième point de passage, et ainsi de suite. Le nombre de points de passage augmentera de 1 tous les 6 éléments. Vous pouvez attribuer des valeurs aux éléments du tableau pour guider le déplacement du robot.
De plus, ce composant fournit une variable g_mm_recv_viz_time qui sert à stocker le nombre de déclenchements sous forme d’entiers. La valeur de la variable commence à 0, indiquant que le composant Get Planned Path est déclenché une fois. Si le composant est déclenché deux fois, la valeur de la variable sera 1.
Précautions
Faites glisser un composant vers la zone d’édition du flux. Cliquez sur l’ dans le coin supérieur gauche du nœud, et sélectionnez Avancé dans la fenêtre contextuelle. Cliquez sur les paramètres avec send et recv l’un après l’autre, et sélectionnez vision3D_mm_mm_v01_init1_ntd_mm dans les fenêtres Network. Assurez-vous que les paramètres réseau de tous les composants sont identiques.
dans le coin supérieur gauche du nœud, et sélectionnez Avancé dans la fenêtre contextuelle. Cliquez sur les paramètres avec send et recv l’un après l’autre, et sélectionnez vision3D_mm_mm_v01_init1_ntd_mm dans les fenêtres Network. Assurez-vous que les paramètres réseau de tous les composants sont identiques.

