Communication Master-Control
Après avoir compris les concepts de base de la communication Master-Control, réalisez les tâches de communication Master-Control dans le processus réel de déploiement en fonction de vos besoins métier et de la marque de votre robot.
| Ce manuel décrit uniquement les tâches de communication dans le processus de déploiement. Pour plus de détails sur les autres tâches du processus de déploiement, consultez les documents Déploiement d’applications. |
| Tâche | Description |
|---|---|
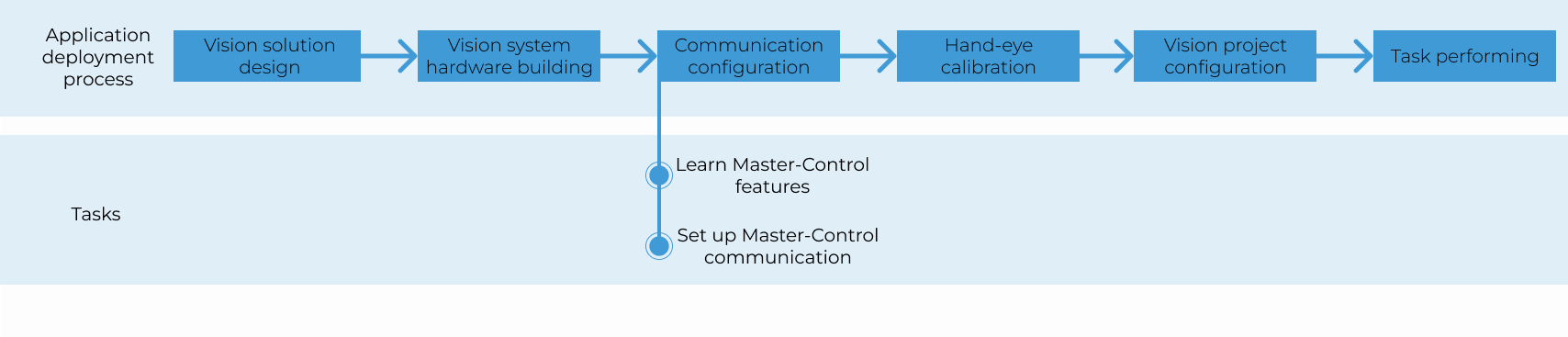
Prendre connaissance des fonctionnalités de Master-Control |
Consultez les descriptions des fonctionnalités Master-Control propres à votre robot afin de vous assurer qu’elles répondent à vos besoins. Les fonctionnalités incluent la communication, la réception et l’envoi de données, les paramètres du robot, ainsi que les fonctionnalités d’entrées et de sorties numériques. |
Configurer la communication Master-Control |
Assurez-vous que le robot peut communiquer avec le système de vision. |
|