Programme d’exemple 10 : MM_S10_Viz_Subtask
Présentation du programme
Description |
Ce programme d’exemple se compose de deux programmes : un programme principal et un sous-programme. Le sous-programme (programme d’arrière-plan) déclenche l’exécution du projet Mech-Viz pour obtenir le trajet planifié. Le programme principal (programme au premier plan) déplace le robot en fonction du trajet planifié. Ensuite, le programme principal déclenche le sous-programme lorsque le robot quitte la zone de prélèvement pour obtenir le prochain trajet planifié, ce qui réduit le temps de cycle.
|
||
Chemin du fichier |
Sous-programme : Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin Programme principal : Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin
|
||
Projet |
Projets Mech-Vision et Mech-Viz |
||
Prérequis |
|
|
Description du programme
La partie suivante décrit le sous-programme.
| À l’instar du programme d’exemple MM_S2_Viz_Basic, le sous-programme déclenche l’exécution du projet Mech-Viz et obtient le code du trajet planifié. Par conséquent, les fonctionnalités du sous-programme qui sont similaires à celles de MM_S2_Viz_Basic ne sont pas décrites dans cette partie. Pour plus d’informations sur ces fonctionnalités, voir Programme d’exemple 2 : MM_S2_Viz_Basic. |
MODULE MM_S10_Sub
!----------------------------------------------------------
! FUNCTION: run Mech-Viz project and get planned path
! in subtask(run together with MM_S10_Viz_Subtask)
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define variables
PERS num pose_num_b:=5;
PERS num vis_pose_num_b:=3;
PERS num toolid_b{5}:=[0,0,0,0,0];
PERS num label_b{5}:=[0,0,0,0,0];
PERS num status_b:=2100;
PERS bool flag_vis_b:=FALSE;
CONST jointtarget snap_jps_b:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
PERS jointtarget jps_b{5}:=
[
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
PROC main()
flag_vis_b:=FALSE;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1",50000,300;
WHILE TRUE DO
IF flag_vis_b=TRUE THEN
MM_Open_Socket;
!trigger Mech-Viz project
MM_Start_Viz 2,snap_jps_b;
!get planned path, 1st argument (1) means getting pose in JPs
MM_Get_VizData 1, pose_num_b, vis_pose_num_b, status_b;
!check whether planned path has been got from Mech-Viz successfully
IF status_b=2100 THEN
!save waypoints of the planned path to local variables one by one
MM_Get_Jps 1,jps_b{1},label_b{1},toolid_b{1};
MM_Get_JPS 2,jps_b{2},label_b{2},toolid_b{2};
MM_Get_JPS 3,jps_b{3},label_b{3},toolid_b{3};
ENDIF
MM_Close_Socket;
flag_vis_b:=FALSE;
ENDIF
ENDWHILE
ENDPROC
ENDMODULELe code ci-dessus montre que le sous-programme définit flag_vis_b sur FALSE, initialise les paramètres de communication, puis écoute en continu la valeur de flag_vis_b via la boucle WHITE.
-
Lorsque flag_vis_b est défini sur TRUE, le sous-programme déclenche l’exécution du projet Mech-Viz, obtient le trajet planifié, puis définit flag_vis_b sur FALSE.
-
Lorsque flag_vis_b est défini sur FALSE, le sous-programme écoute en continu la valeur de flag_vis_b.
La partie suivante décrit le programme principal.
| À l’instar du programme d’exemple MM_S2_Viz_Basic, le programme principal effectue la prise et la dépose sur la base du code du trajet planifié. Par conséquent, les fonctionnalités du programme principal qui sont similaires à celles de MM_S2_Viz_Basic ne sont pas décrites dans cette partie. Pour plus d’informations sur ces fonctionnalités, voir Programme d’exemple 2 : MM_S2_Viz_Basic. |
MODULE MM_S10_Viz_Subtask
!----------------------------------------------------------
! FUNCTION: run Mech-Viz project and get planned path
! in subtask (run together with MM_S10_Sub)
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define local num variables
PERS bool flag_vis_b:=FALSE;
PERS num status_b:=2100;
PERS num pose_num_b:=5;
PERS num toolid_b{5}:=[0,0,0,0,0];
PERS num label_b{5}:=[0,0,0,0,0];
PERS num vis_pose_num_b:=3;
LOCAL VAR num count:=0;
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget pick_wait_point:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
PERS jointtarget jps_b{5}:=
[
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
!define local tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
PROC Sample_10()
!set the acceleration parameters
AccSet 50, 50;
!set the velocity parameters
VelSet 50, 1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
!trigger Mech-Viz project and get planned path
trigger_vis_b;
LOOP:
!move to wait position for picking
MoveL pick_wait_point,v1000,fine,gripper1;
!wait until subtask program finished
WaitUntil(flag_vis_b=FALSE);
!check whether planned path has been got from Mech-Viz successfully
IF status_b <> 2100 THEN
!add error handling logic here according to different error codes
!e.g.: status=2038 means no point cloud in ROI
Stop;
ENDIF
!follow the planned path to pick
!move to approach waypoint of picking
MoveAbsJ jps_b{1},v1000,fine,gripper1;
!move to picking waypoint
MoveAbsJ jps_b{2},v300,fine,gripper1;
!add object grasping logic here, such as "setdo DO_1, 1;"
Stop;
!move to departure waypoint of picking
MoveAbsJ jps_b{3},v1000,fine,gripper1;
!move to intermediate waypoint of placing, and trigger Mech-Viz project and get planned path in advance
MoveJSync drop_waypoint,v1000,z50,gripper1,"trigger_vis_b";
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
GOTO LOOP;
ENDPROC
PROC trigger_vis_b()
flag_vis_b:=TRUE;
ENDPROC
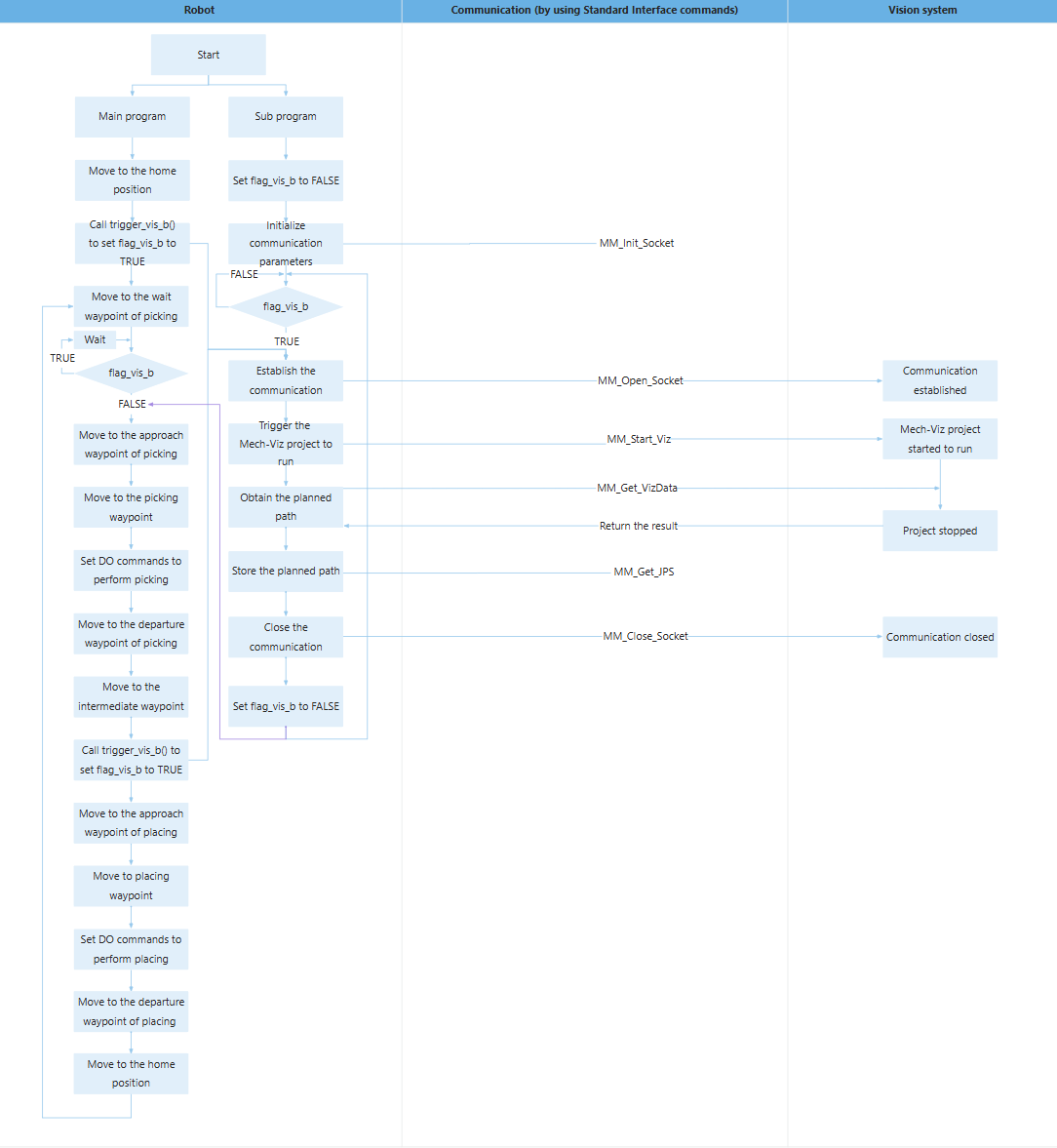
ENDMODULELe flux de travail correspondant au code du programme d’exemple ci-dessus est illustré dans la figure ci-dessous.
Le tableau ci-dessous illustre le code central du programme principal.
| Fonctionnalité | Code et description | ||
|---|---|---|---|
Déclencher l’exécution du projet Mech-Viz et obtenir le trajet planifié |
Dans l’exemple ci-dessus, le programme principal appelle la fonction trigger_vis_b(). Le code de cette fonction est présenté ci-dessous. Dans l’exemple ci-dessus, lorsque flag_vis_b est défini sur TRUE dans la fonction trigger_vis_b(), le sous-programme détecte la valeur TRUE, déclenche l’exécution du projet Mech-Viz, puis obtient le trajet planifié. |
||
Planifier le trajet suivant à l’avance par bouclage (préhension→déclenchement du prochain cycle de planification de trajectoire→dépose) |
Le code ci-dessus indique que le programme principal boucle à travers le code entre LOOP et GOTO LOOP. Dans l’exemple ci-dessus, le robot se déplace vers un point d’attente avant la prise et attend que le sous-programme obtienne et stocke le trajet planifié (c.-à-d. que flag_vis_b passe de TRUE à FALSE). Dans l’exemple ci-dessus, le robot se déplace le long du trajet planifié jusqu’au point d’approche de la prise (jps_b{1}), puis jusqu’au point de prise (jps_b{2}), effectue la prise (par exemple, setdo DO_1, 1;), puis se déplace jusqu’au point de départ de la prise (jps_b{3}). Dans le code ci-dessus, le robot se déplace vers la position cible (drop_waypoint, c’est-à-dire le point intermédiaire pendant la dépose) et appelle la fonction trigger_vis_b() à la position cible. Le programme principal appelle à nouveau la fonction trigger_vis_b() pour déclencher l’exécution du projet Mech-Viz et obtenir le trajet planifié. Maintenant que le robot se trouve en dehors de la zone de dépose, il peut planifier à l’avance le prochain trajet de prise sans attendre la fin de la dépose, puis planifier le prochain trajet de prise.
L’exemple ci-dessus indique que le robot se déplace vers le point d’approche de la dépose (RelTool(drop,0,0,-100)), puis vers le point de dépose (drop), effectue la dépose (par exemple, setdo DO_1, 0;), puis se déplace vers le point de départ de la dépose (RelTool(drop,0,0,-100)) et ensuite vers la position d’origine. |