Configuration de la communication Master-Control
Ce guide vous montre comment charger le programme Master-Control sur un robot MELFA et configurer la communication Master-Control entre le robot et le système de vision Mech-Mind.
| Dans cette section, vous allez charger le programme Master-Control du robot et les fichiers de configuration dans le système du robot afin d’établir la communication Master-Control entre le système de vision et le robot. |
Préparation
Configurer la connexion réseau
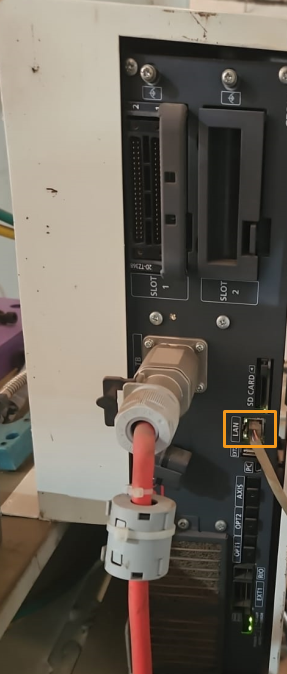
Connecter le matériel
Utilisez le câble Ethernet pour connecter les ports réseau de l’IPC et du contrôleur du robot.
Définir l’adresse IP sur l’IPC
L’adresse IP par défaut du robot MELFA est 192.168.0.20. Par conséquent, définir l’adresse IP de l’IPC sur une adresse du sous-réseau 192.168.0.0/255.255.255.0.
| Les adresses IP de l’IPC et du robot doivent être sur le même sous-réseau, mais ne définissez pas les mêmes adresses IP. |
Créer et configurer le projet
Dans ce guide, le programme Master-Control est chargé dans le robot via le logiciel RT ToolBox3. Par conséquent, avant de charger le programme, vous devez installer RT ToolBox3.
-
Installer le logiciel RT ToolBox3 sur l’IPC.
Vous pouvez contacter le fabricant du robot pour obtenir le logiciel RT ToolBox3. -
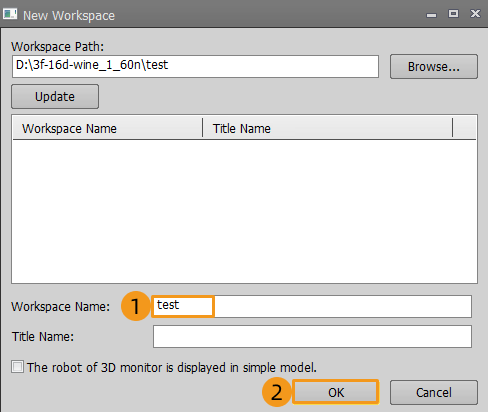
Ouvrez RT ToolBox3. Cliquez sur Nouveau dans la barre de menus, entrez le nom de l’espace de travail, puis cliquez sur OK.
-
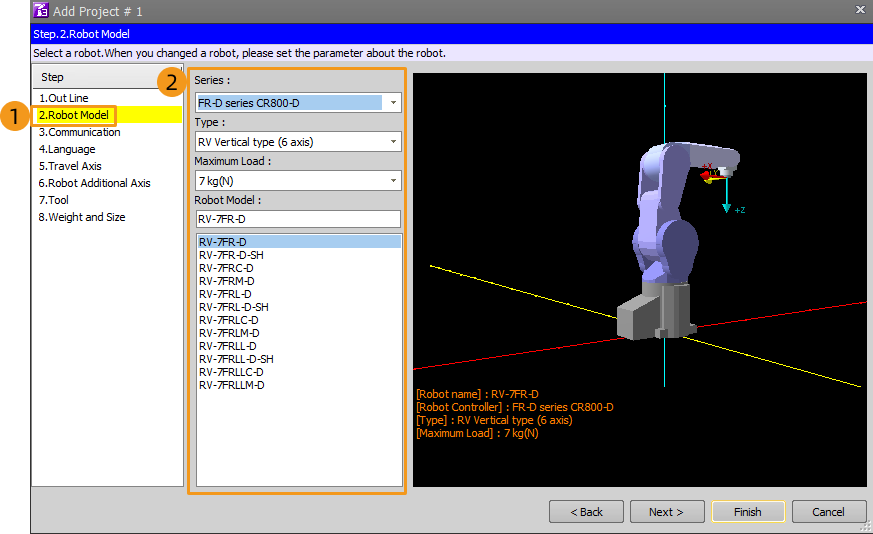
Cliquez sur Modèle de robot dans le panneau de gauche, et sélectionnez la Série, le Type, la Charge maximale et le Modèle de robot du robot utilisé.
-
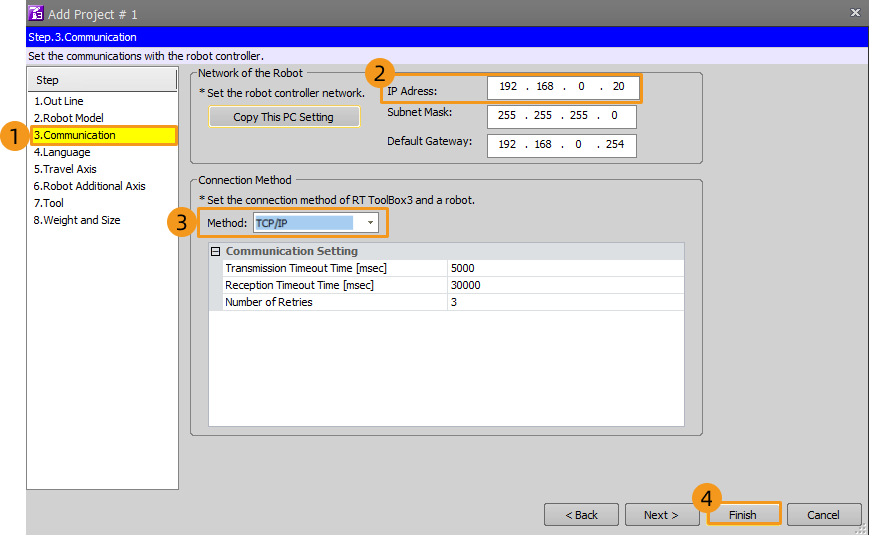
Cliquez sur Communication dans la barre de gauche et vérifiez l’adresse IP du robot. Assurez-vous que les adresses IP du robot et de l’IPC sont sur le même sous-réseau. Définissez la méthode de connexion sur TCP/IP. Ensuite, cliquez sur Terminer.
-
Lorsque la boîte de dialogue suivante s’affiche, cliquez sur En ligne pour connecter le robot utilisé.
Charger les fichiers du programme sur le robot
-
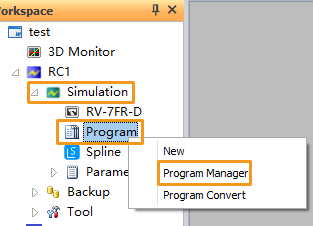
Dans le panneau Espace de travail, cliquez sur .
-
Effectuez les étapes ci-dessous dans la fenêtre pop-up.
-
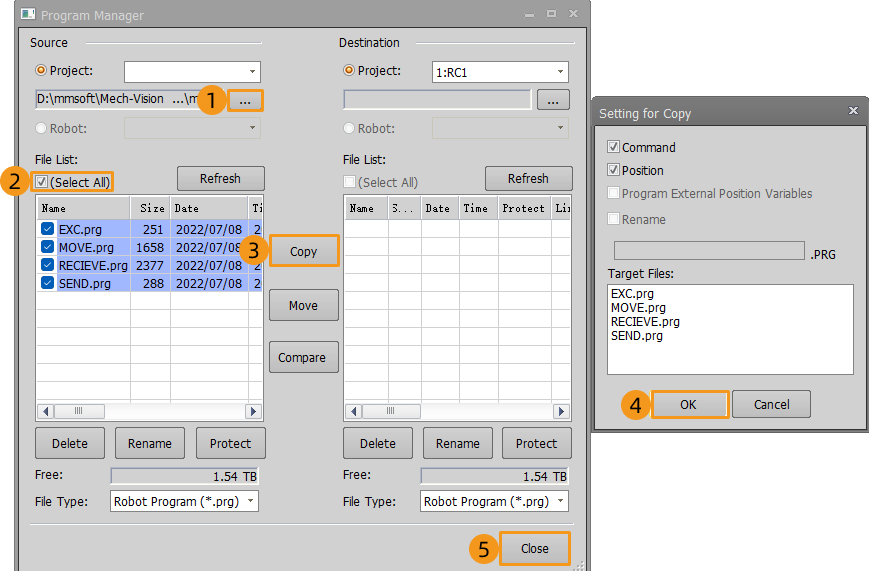
Cliquez sur ....
-
Dans le navigateur de fichiers qui s’ouvre, accédez à
Communication Component/Robot_Server/Robot_FullControldepuis le répertoire d’installation de Mech-Vision & Mech-Viz. Sélectionnez le dossier melfa et cliquez sur OK. -
Sélectionnez (Tout sélectionner).
-
Cliquez sur Copier.
-
Cliquez sur OK dans la fenêtre pop-up. Les fichiers copiés apparaîtront dans la zone de liste de fichiers à droite. Ensuite, cliquez sur Fermer.
-
À présent, le programme Master-Control et les fichiers de configuration sont chargés dans le système du robot.
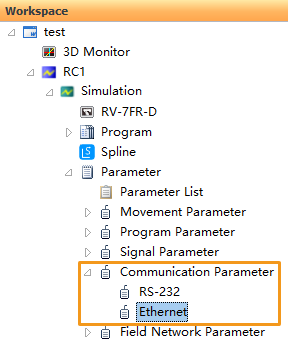
Configurer Ethernet
-
Cliquez sur sur le panneau Espace de travail à gauche.
-
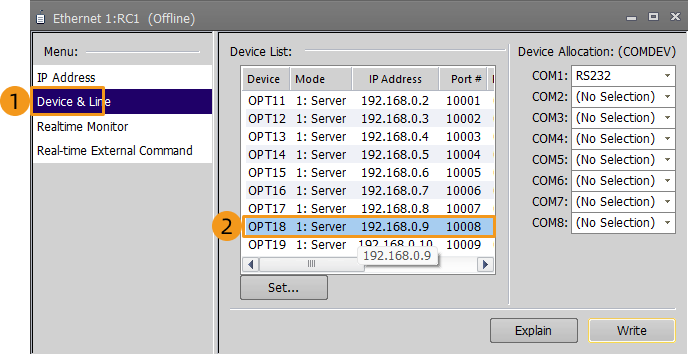
Cliquez sur Périphérique & Ligne dans le menu de gauche, puis double-cliquez sur la ligne OPT18.
-
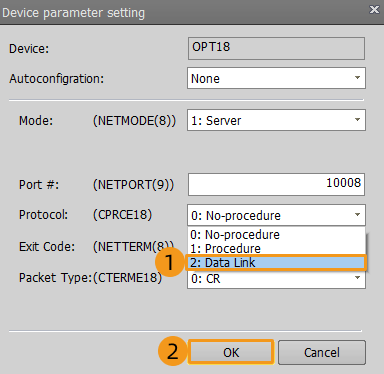
Dans la fenêtre pop-up, réglez Protocole sur Liaison de données, puis cliquez sur OK.
-
Définissez le Protocole du périphérique OPT19 sur Liaison de données en suivant les étapes ci-dessus.
-
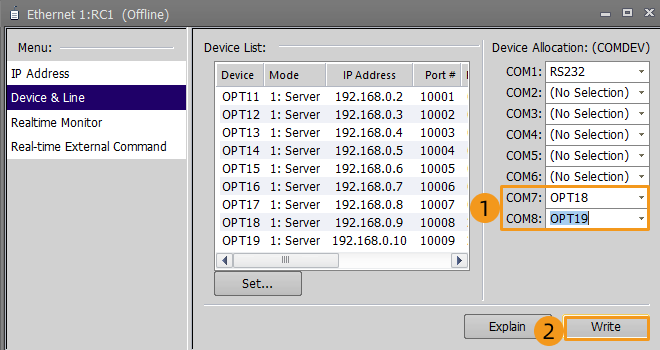
Dans la fenêtre Ethernet, définissez la valeur de COM7 sur OPT18 et la valeur de COM8 sur OPT19, puis cliquez sur Écrire.
-
Cliquez sur (Y) dans la boîte de dialogue pop-up.
Le robot redémarre automatiquement après l’écriture du programme. 
Tester la communication Master-Control
Exécuter le programme
-
Basculez la clé sur le contrôleur du robot en mode AUTOMATIC.

-
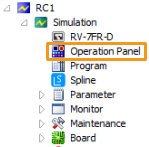
Cliquez sur dans le panneau d’espace de travail de RT ToolBox3.
-
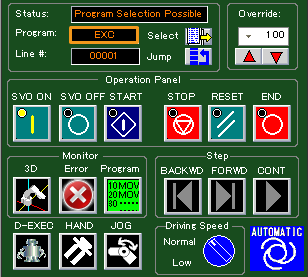
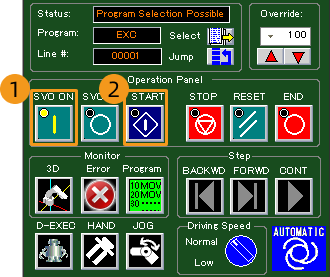
Cliquez sur l’icône Sélectionner dans le panneau d’opération. Sélectionnez EXC dans la fenêtre pop-up et cliquez sur OK.

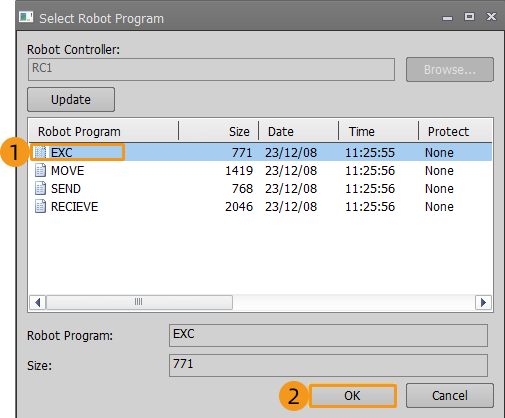
Après cela, EXC s’affichera dans la zone de texte Programme.
-
Cliquez sur SVO ON, puis cliquez sur Démarrer.
Créer un projet Mech-Viz
-
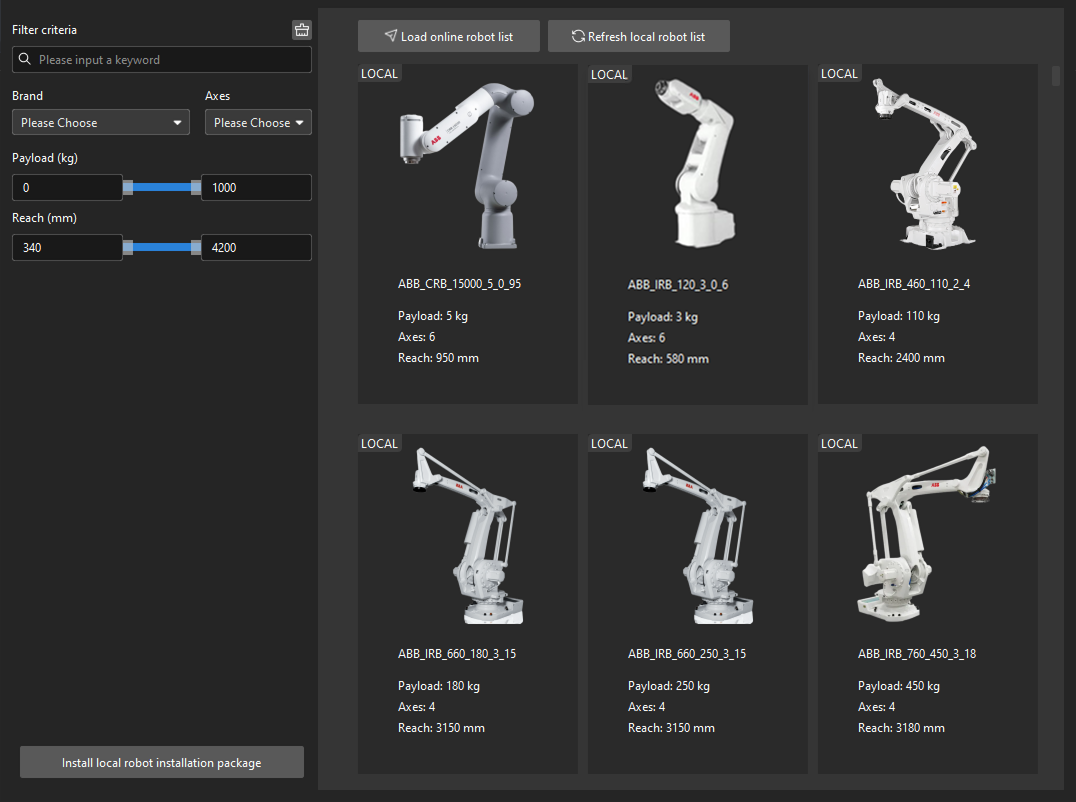
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
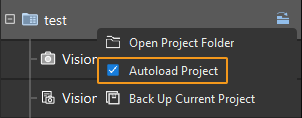
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
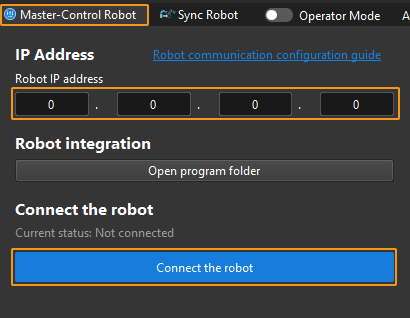
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
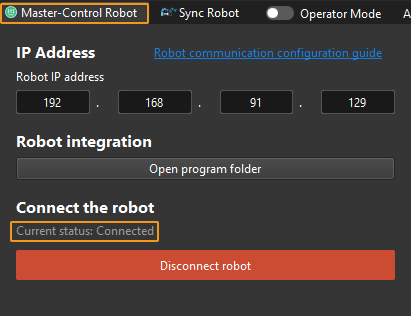
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
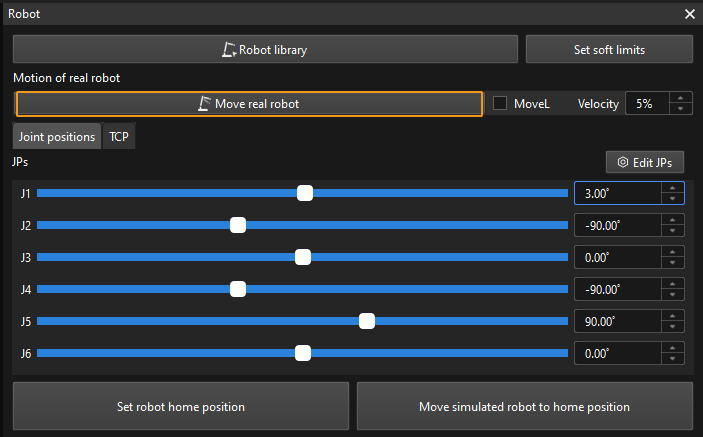
Déplacer le robot
-
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
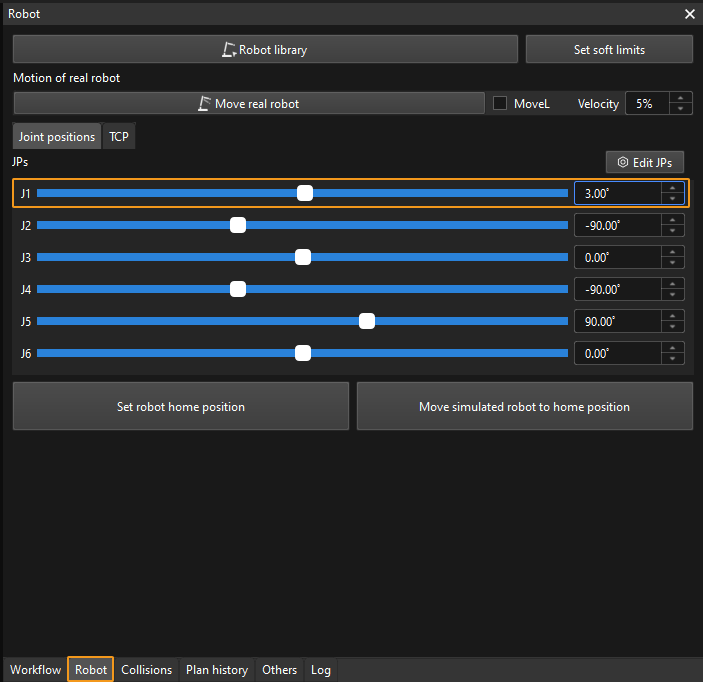
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !