Programme d’exemple 14: MM_S14_Vis_GetUserData
Présentation du programme
Description |
Lorsque le robot obtient le résultat de vision, il obtient également les données de sortie personnalisées du projet Mech-Vision. |
Chemin du fichier |
Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin |
Projet |
projet Mech-Vision (un ou plusieurs ports personnalisés doivent être ajoutés à l’étape Sortie) |
Prérequis |
|
| Ce programme d’exemple est fourni à titre de référence uniquement. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette partie décrit le programme d’exemple MM_S14_Vis_GetUserData.
| Comparé au programme d’exemple MM_S1_Vis_Basic, ce programme ne contient que la modification suivante (le code de cette modification est en gras). Par conséquent, seule la modification est décrite dans la partie suivante. Pour des informations sur les parties de MM_S14_Vis_GetUserData qui sont identiques à celles de MM_S1_Vis_Basic, voir Programme d’exemple 1: MM_S1_Vis_Basic. |
DEF MM_S14_Vis_GetUserData ( )
;---------------------------------------------------
; FUNCTION: trigger Mech-Vision project and get
; vision result and custom data using command 110
; Mech-Mind, 2023-12-25
;---------------------------------------------------
;set current tool no. to 1
BAS(#TOOL,1)
;set current base no. to 0
BAS(#BASE,0)
;move to robot home position
PTP HOME Vel=100 % DEFAULT
;initialize communication parameters (initialization is required only once)
MM_Init_Socket("XML_Kuka_MMIND",873,871,60)
;move to image-capturing position
LIN camera_capture Vel=1 m/s CPDAT1 Tool[1] Base[0]
;trigger NO.1 Mech-Vision project
MM_Start_Vis(1,0,2,init_jps)
;get vision result from NO.1 Mech-Vision project
MM_Get_Dy_Data(1,pos_num,status)
;check whether vision result has been got from Mech-Vision successfully
IF status<> 1100 THEN
;add error handling logic here according to different error codes
;e.g.: status=1003 means no point cloud in ROI
;e.g.: status=1002 means no vision result
halt
ENDIF
;save first vision point data to local variables
MM_Get_DyPose(1,Xpick_point,label)
;save received custom data
offset_x=MM_UserData[1]
offset_y=MM_UserData[2]
offset_z=MM_UserData[3]
;calculate pick approach point based on pick point
tool_offset={X 0,Y 0,Z -100,A 0,B 0,C 0}
Xpick_app=Xpick_point:tool_offset
;move to intermediate waypoint of picking
PTP pick_waypoint CONT Vel=50 % PDAT1 Tool[1] Base[0]
;move to approach waypoint of picking
LIN pick_app Vel=1 m/s CPDAT2 Tool[1] Base[0]
;move to picking waypoint
LIN pick_point Vel=0.3 m/s CPDAT3 Tool[1] Base[0]
;add object grasping logic here, such as "$OUT[1]=TRUE"
halt
;move to departure waypoint of picking
LIN pick_app Vel=1 m/s CPDAT2 Tool[1] Base[0]
;move to intermediate waypoint of placing
PTP drop_waypoint CONT Vel=100 % PDAT2 Tool[1] Base[0]
;move to approach waypoint of placing
LIN drop_app Vel=1 m/s CPDAT4 Tool[1] Base[0]
;move to placing waypoint
LIN drop Vel=0.3 m/s CPDAT5 Tool[1] Base[0]
;add object releasing logic here, such as "$OUT[1]=FALSE"
halt
;move to departure waypoint of placing
LIN drop_app Vel=1 m/s CPDAT4 Tool[1] Base[0]
;move back to robot home position
PTP HOME Vel=100 % DEFAULT
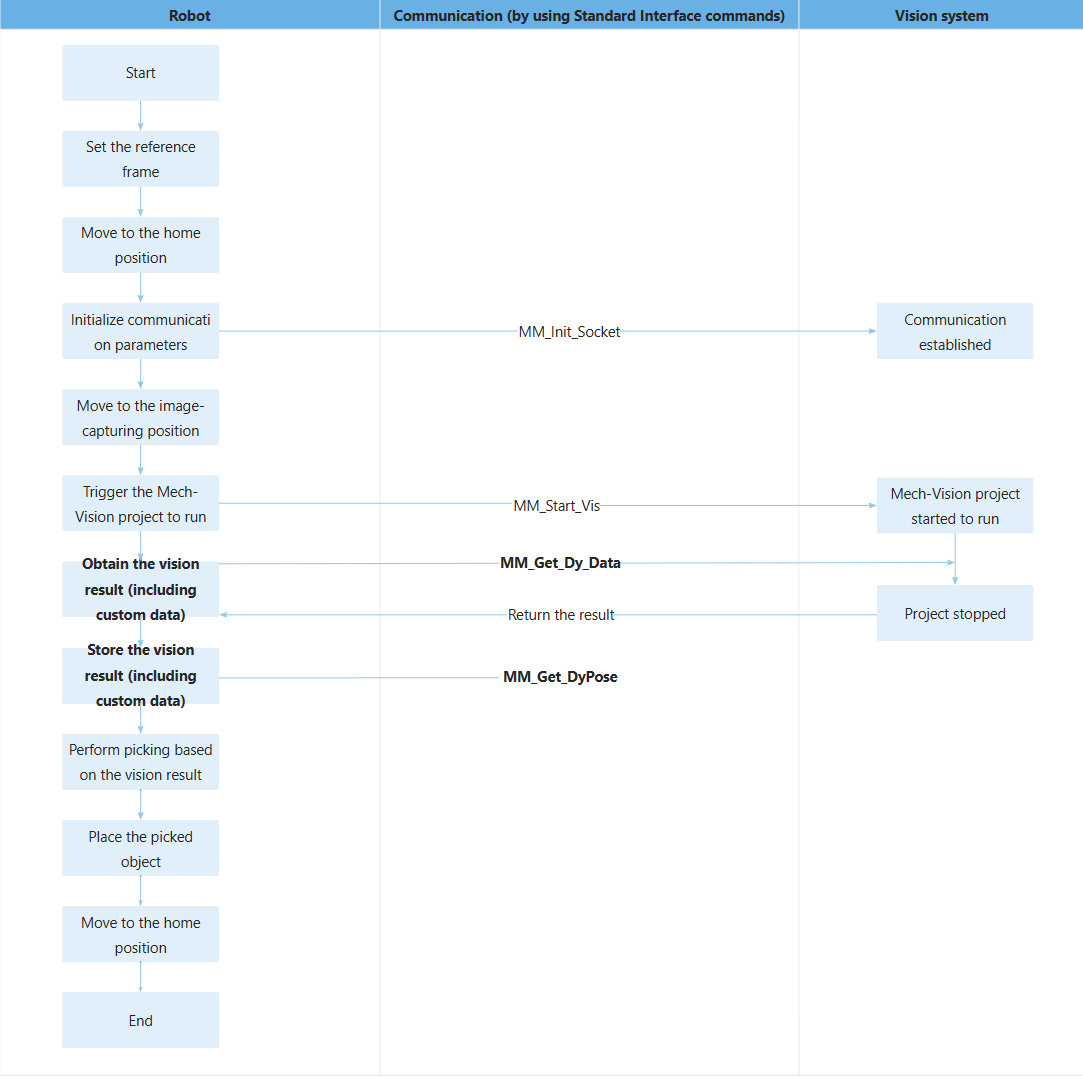
ENDLe flux de travail correspondant au code du programme d’exemple ci-dessus est illustré dans la figure ci-dessous.
Le tableau ci-dessous décrit le code en gras. Vous pouvez cliquer sur l’hyperlien du nom de commande pour afficher sa description détaillée.
| Fonctionnalité | Code et description | ||||
|---|---|---|---|---|---|
Obtenir le résultat de vision (y compris les données personnalisées) |
L’ensemble de l’instruction indique que le robot obtient le résultat de vision du projet Mech-Vision avec un ID de 1. Le résultat de vision inclut des données personnalisées.
|
||||
Stocker le résultat de vision (y compris les données personnalisées) |
L’ensemble de l’instruction enregistre le TCP, l’étiquette et les données personnalisées du premier point de vision dans les variables spécifiées. Le code ci-dessus affecte les données personnalisées MM_UserData[1], MM_UserData[2] et MM_UserData[3], qui représentent trois points de vision (points de passage de prise), respectivement à offset_x, offset_y et offset_z.
|