ABB RobotWare 6 Étalonnage automatique
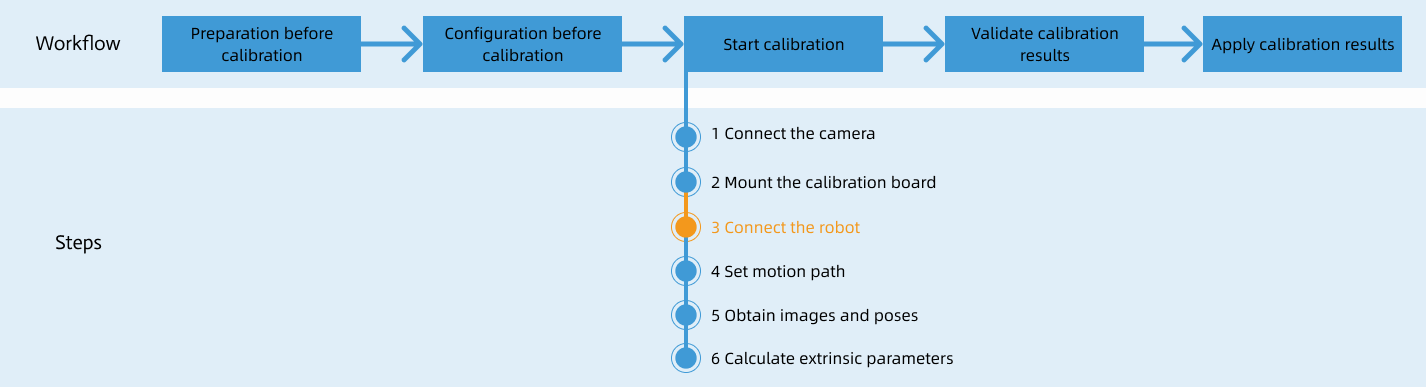
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
1. Sélectionner et modifier le programme d’étalonnage
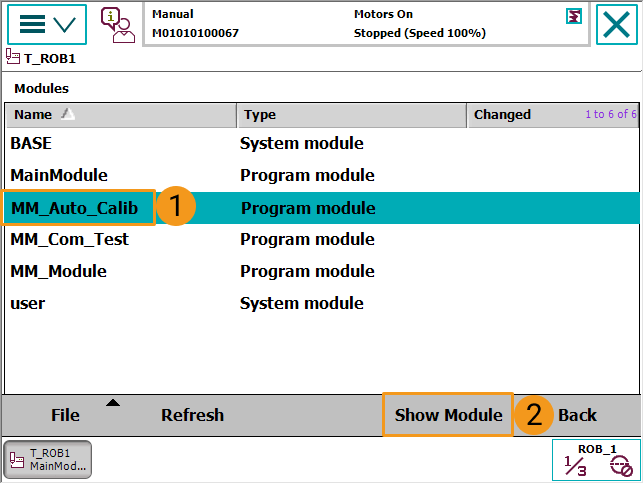
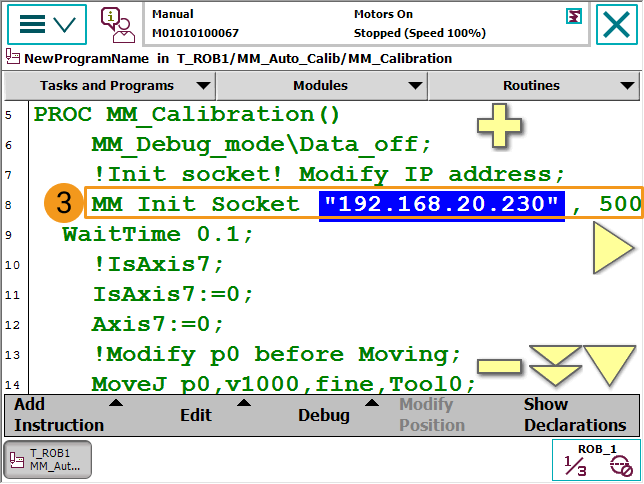
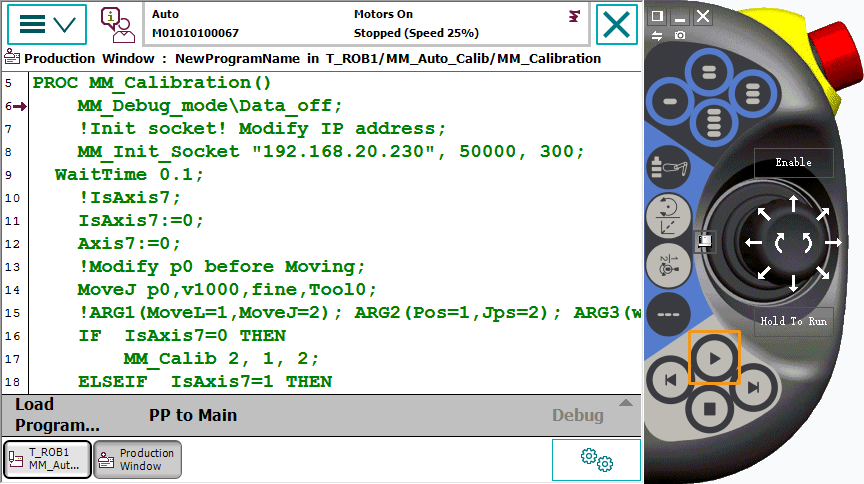
En mode manuel, sélectionnez , puis localisez et ouvrez le module de programme MM_Auto_Calib dans T_ROB1. Assurez-vous que l’adresse IP de la ligne MM_Init_Socket dans le module de programme est l’adresse IP de l’IPC, et que le port est identique au paramétrage dans Mech-Vision. Pour des instructions détaillées sur l’opération, reportez-vous à sélectionner et modifier le programme de test de communication.
2. Apprendre le point de départ de l’étalonnage
-
Déplacez le robot vers le point de départ pour l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
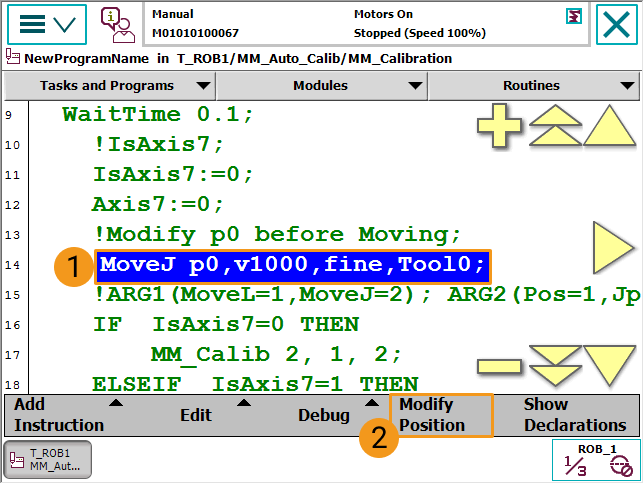
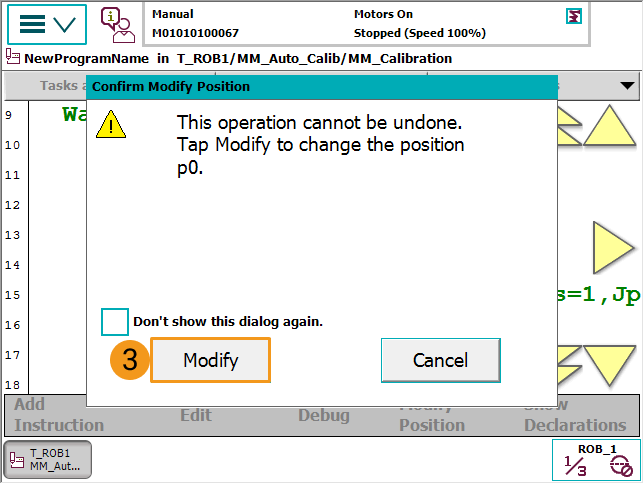
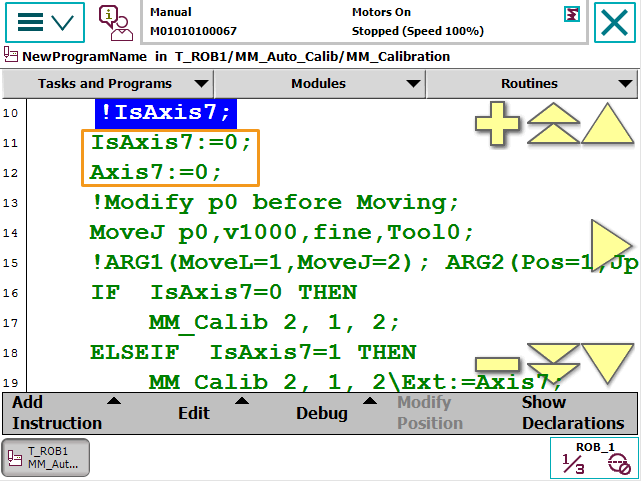
Sélectionnez la ligne dans l’image ci-dessous puis choisissez Modifier la position. Sélectionnez Modifier dans la boîte de dialogue pour enregistrer la pose actuelle du robot dans P0.
-
S’il y a un 7e axe qui est contrôlé par le robot sur site, modifiez “IsAxis7 :=0;” en “IsAxis7 :=1;” et modifiez la valeur de Axis7 en conséquence (Axis7 = XX, XX désigne la valeur actuelle du 7e axe). S’il n’y a pas de 7e axe ou si le 7e axe est contrôlé par un PLC, vous pouvez ignorer cette étape.
3. Exécuter le programme d’étalonnage
-
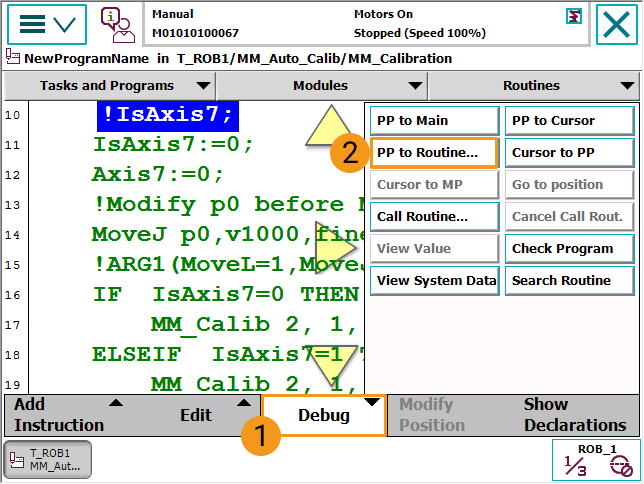
En mode manuel, sélectionnez dans l’interface du programme MM_Auto_Calib.
-
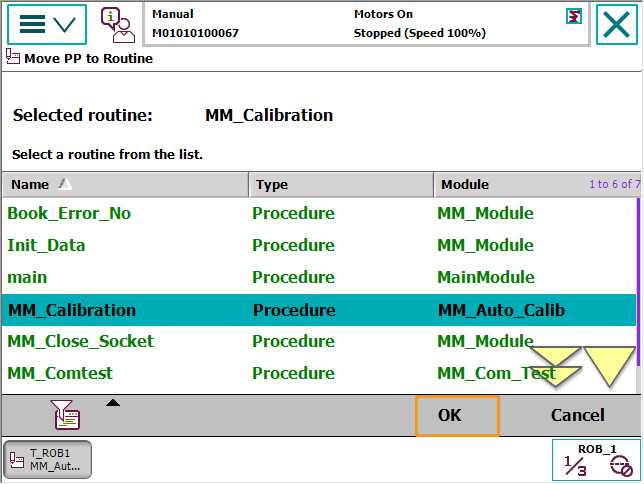
Après avoir sélectionné MM_Calibration, sélectionnez OK.
-
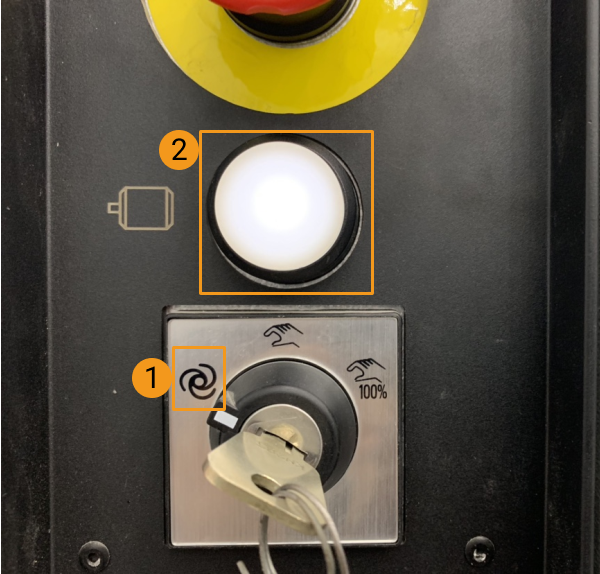
Tournez la clé sur le contrôleur en mode automatique. Sélectionnez le bouton Moteurs en marche et assurez-vous que le témoin moteur est allumé.
Si l’avertissement Auto Condition Reset (qui réinitialise le pointeur de programme vers le programme principal) apparaît dans l’interface du boîtier d’enseignement, le programme ne peut pas s’exécuter normalement dans les étapes suivantes.
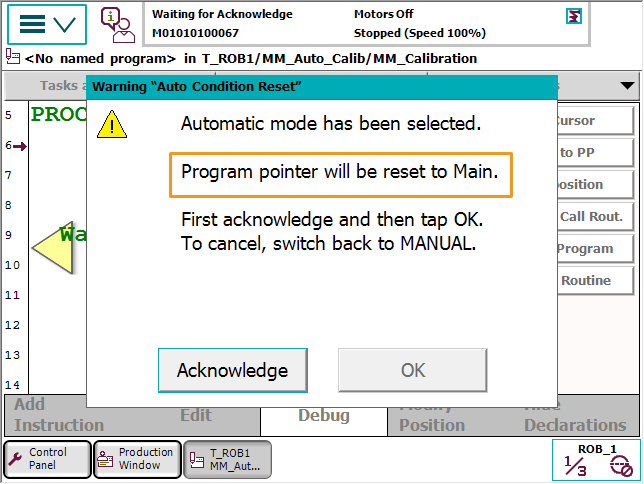
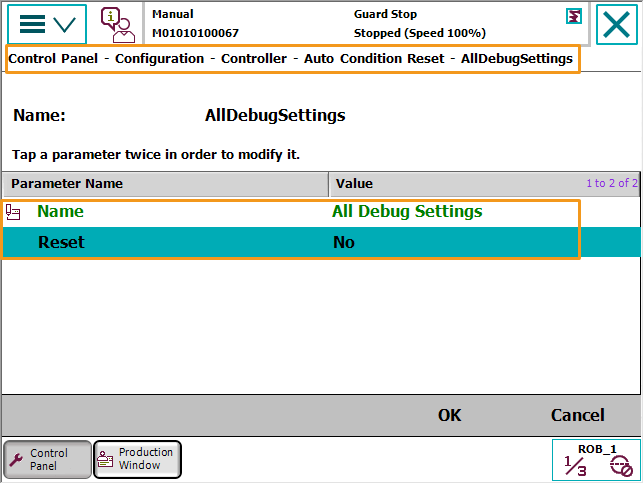
Dans ce cas, vous pouvez passer en mode manuel, sélectionner , régler Reset sur No, puis réexécuter l’Étape 3.
-
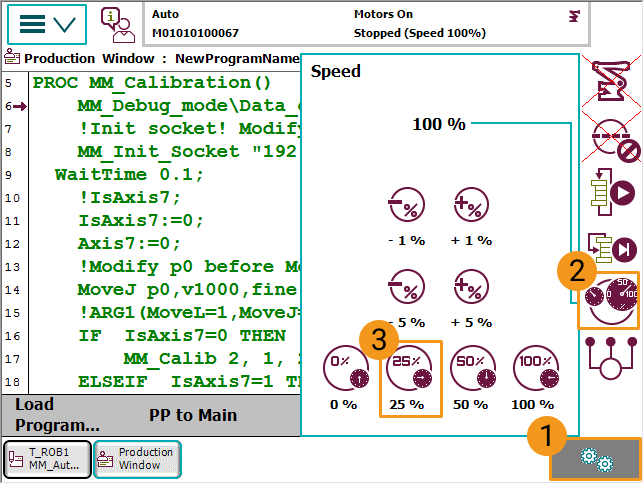
Suivez les étapes dans l’image pour modifier la vitesse à 25 %.
-
Dans l’interface suivante, sélectionnez le bouton d’exécution.
-
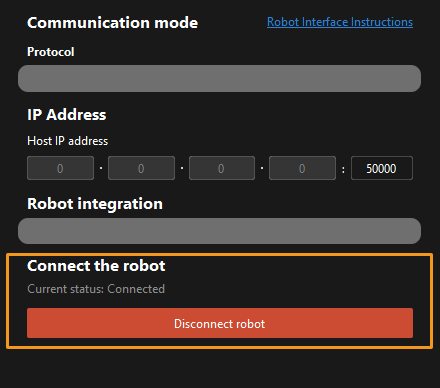
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-