Kawasaki Étalonnage automatique
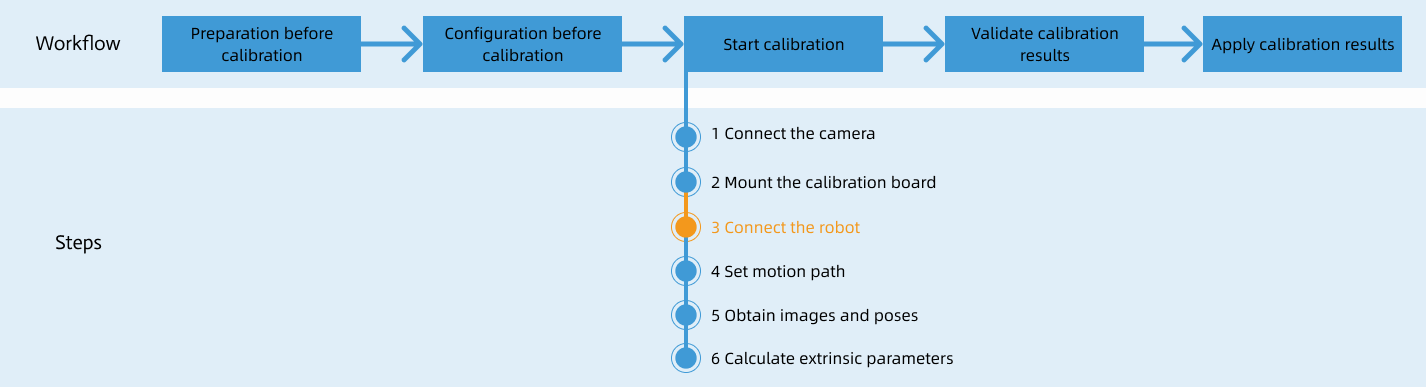
Après avoir configuré la communication via l’interface standard, vous pouvez connecter le robot pour effectuer l’étalonnage automatique. Le flux de travail global de l’étalonnage automatique est illustré dans la figure ci-dessous.
Note spéciale
Pendant la procédure d’étalonnage, lorsque vous atteignez l’étape Connecter le robot et que le bouton En attente de la connexion du robot… apparaît dans Mech-Vision, effectuez les étapes ci-dessous côté robot. Après avoir réalisé ces étapes, poursuivez avec les étapes restantes dans Mech-Vision.
|
1. Sélectionner et modifier le programme d’étalonnage
-
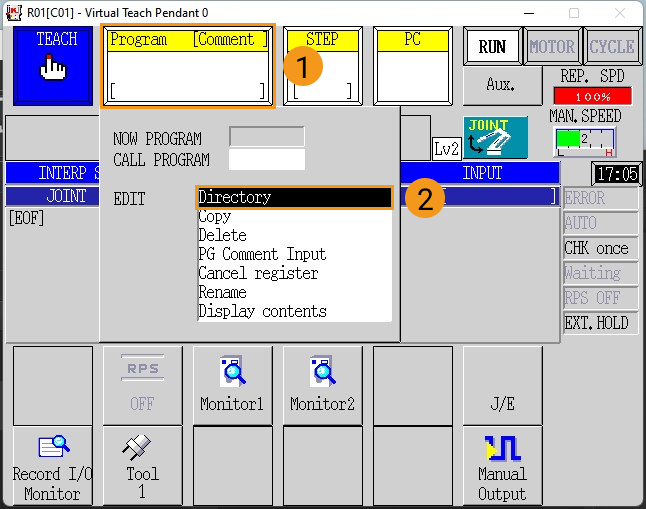
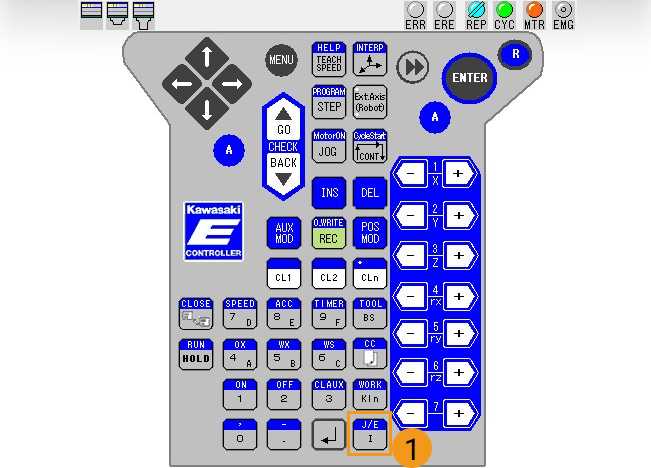
Appuyez sur la zone du programme en mode enseignement. Sélectionnez Répertoire dans le menu contextuel.
-
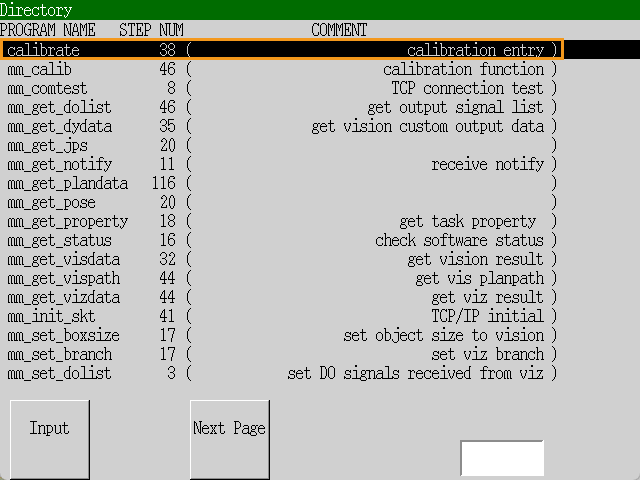
Sélectionnez dans le répertoire le programme au premier plan calibrate, et appuyez sur ENTRÉE sur le boîtier d’apprentissage pour confirmer.
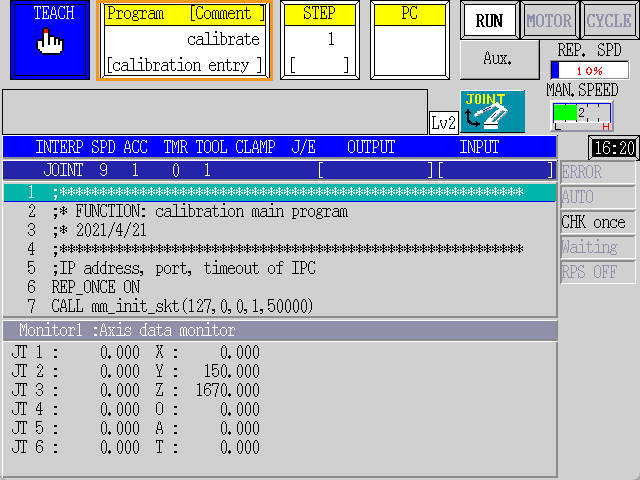
La figure suivante montre l’interface après l’ajout du programme.
-
Modifiez les paramètres de la fonction mm_init_skt dans le programme calibrate en suivant les étapes ci-dessous.
-
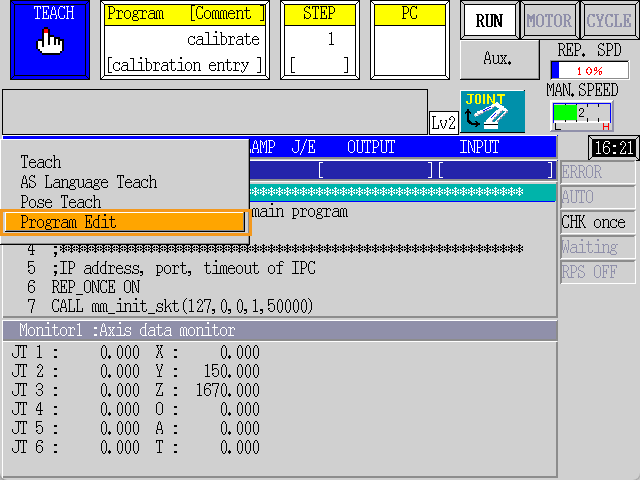
Appuyez sur J/E sur le boîtier d’apprentissage, sélectionnez Édition du programme dans le menu contextuel, puis appuyez sur ENTRÉE pour confirmer.
-
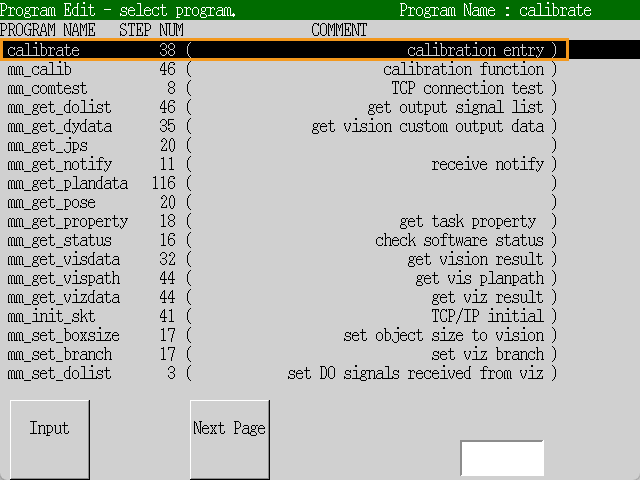
Sélectionnez calibrate dans le répertoire des programmes, et appuyez sur ENTRÉE pour confirmer.
-
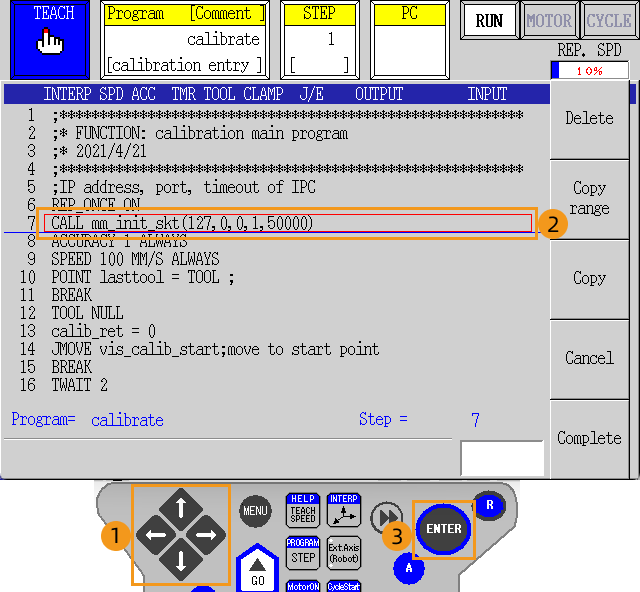
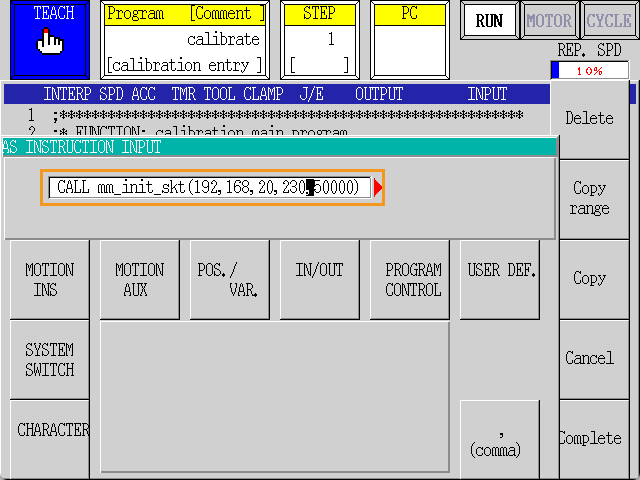
Déplacez le cadre de sélection rouge jusqu’à la ligne qui contient mm_init_skt sur le boîtier d’apprentissage à l’aide des touches fléchées pour sélectionner call mm_init_skt(127,0,0,1,50000). Ensuite, appuyez sur la touche ENTRÉE pour confirmer.
-
Déplacez le curseur aux positions nécessaires avec les touches fléchées sur le boîtier d’apprentissage pour modifier les paramètres : remplacez «127,0,0,1» par l’adresse IP de l’IPC, et «50000» par le numéro de port hôte défini dans Mech-Vision. Après avoir modifié les paramètres, appuyez sur ENTRÉE pour confirmer et appuyez sur R pour quitter.
-
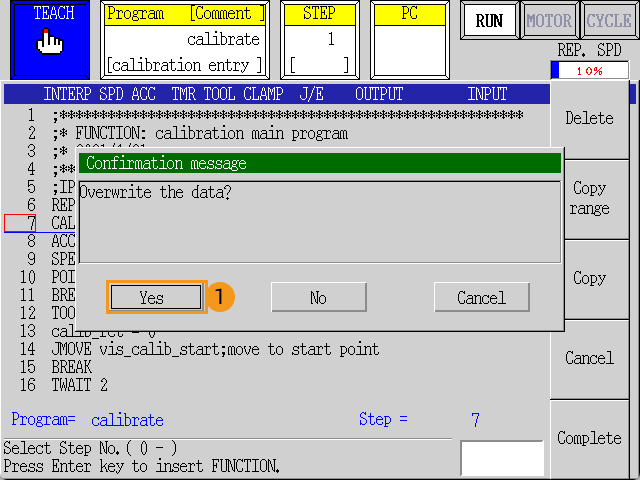
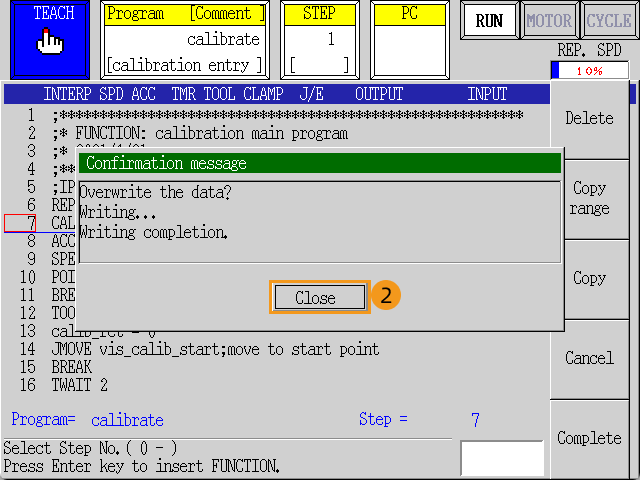
Dans la fenêtre de confirmation affichée, appuyez sur Oui, puis appuyez sur Fermer.
-
2. Enseigner le point de départ de l’étalonnage
-
Déplacez le robot jusqu’au point de départ de l’étalonnage.
Vous pouvez utiliser la position du robot à l’étape Vérifier la qualité du nuage de points de la plaque d’étalonnage comme point de départ de l’étalonnage.
-
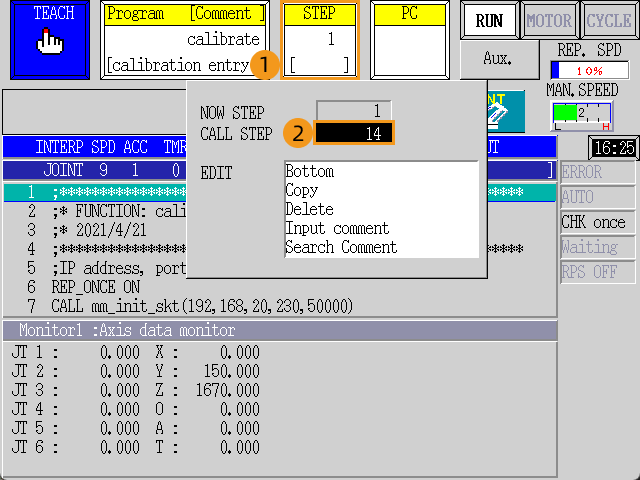
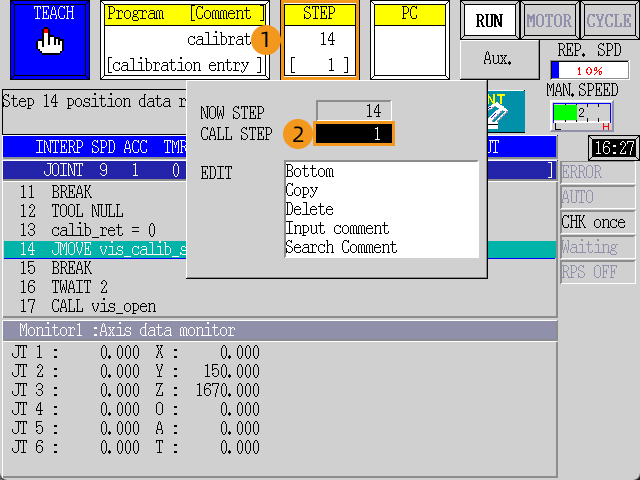
Sélectionnez la zone STEP et saisissez le numéro de la ligne contenant « JMOVE vis_calib_start; » (par exemple, 14). Appuyez sur ENTRÉE pour sélectionner la ligne.
-
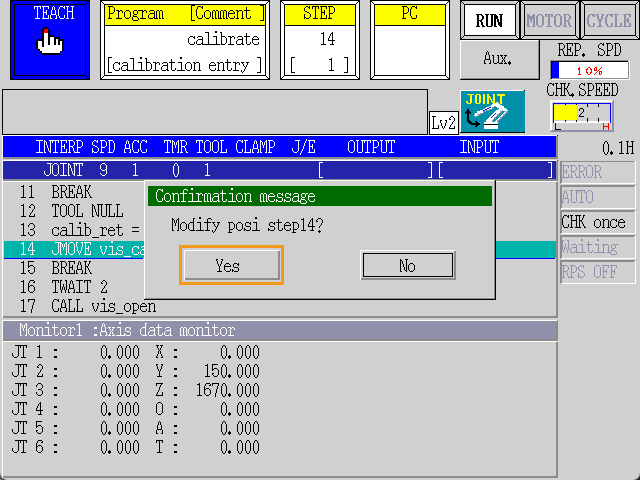
Appuyez simultanément sur les touches A et POS MOD sur le boîtier d’apprentissage.
-
Sélectionnez Oui dans la boîte de dialogue pour enregistrer la pose actuelle du robot, qui peut être utilisée directement comme point de départ d’étalonnage, dans la variable de pose vis_calib_start.
3. Exécuter le programme d’étalonnage
-
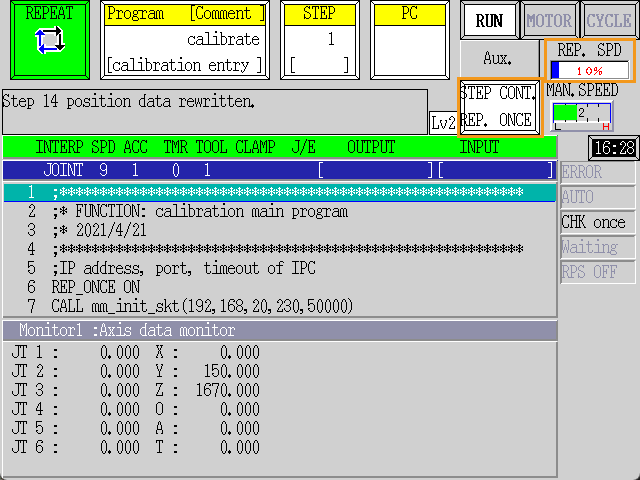
Appuyez sur la zone STEP, saisissez 1 à l’aide de la touche numérique, puis appuyez sur ENTRÉE pour relancer le programme depuis la première ligne.
-
Basculez Teach/Repeat sur le contrôleur vers REPEAT, et mettez le verrou d’enseignement sur le boîtier d’apprentissage sur OFF. Après ces opérations, le robot doit être en mode REPEAT.

-
Passez au mode STEP CONT. REP. ONCE, et modifiez la valeur de REP. SPD à 10%.
-
Maintenez la touche A sur le clavier et appuyez sur MOTOR à l’écran pour allumer MOTOR. Maintenez A sur le clavier et appuyez sur CYCLE à l’écran pour allumer CYCLE. Si RUN ne devient pas vert, maintenez la touche A et appuyez sur la touche RUN/HOLD sur le boîtier d’apprentissage.
Lorsque RUN, MOTOR, CYCLE sont tous allumés, le programme commence à s’exécuter. 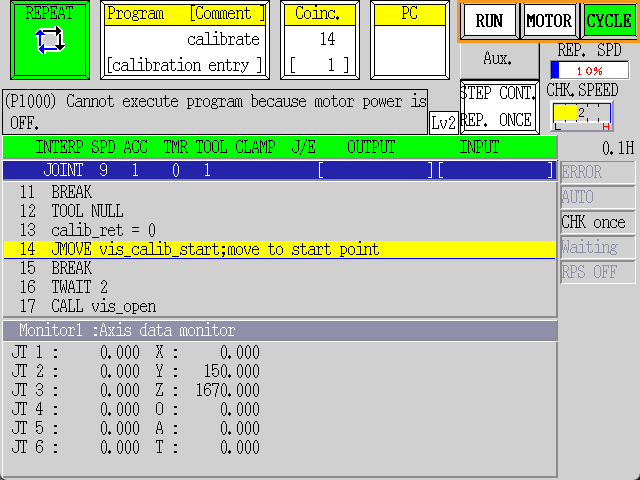
-
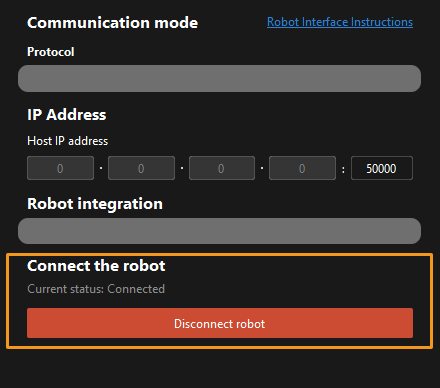
Lorsque, dans la fenêtre Étalonnage de Mech-Vision, l'état actuel passe à connecté et que le bouton En attente de la connexion du robot... devient Déconnecter le robot, cliquez sur Suivant en bas.
-
Effectuez l’étape 4 de Démarrer l’étalonnage (à savoir Définir la trajectoire de mouvement) ainsi que les opérations suivantes en vous basant sur les liens ci-dessous.
-
Si le mode de montage de la caméra est œil-vers-main, consultez ce document et effectuez les opérations correspondantes.
-
Si le mode de montage de la caméra est œil-en-main, consultez ce document et effectuez les opérations correspondantes.
-