Communication via Adapter
After you appris les concepts de base de la communication via Adapter, complete Adapter communication tasks in the actual application deployment process based on your actual business requirements and your external device.
| This manual describes only the communication tasks in the deployment process. For details of other tasks in the deployment process, see Déploiement d’applications documents. |
| Tâche | Description |
|---|---|
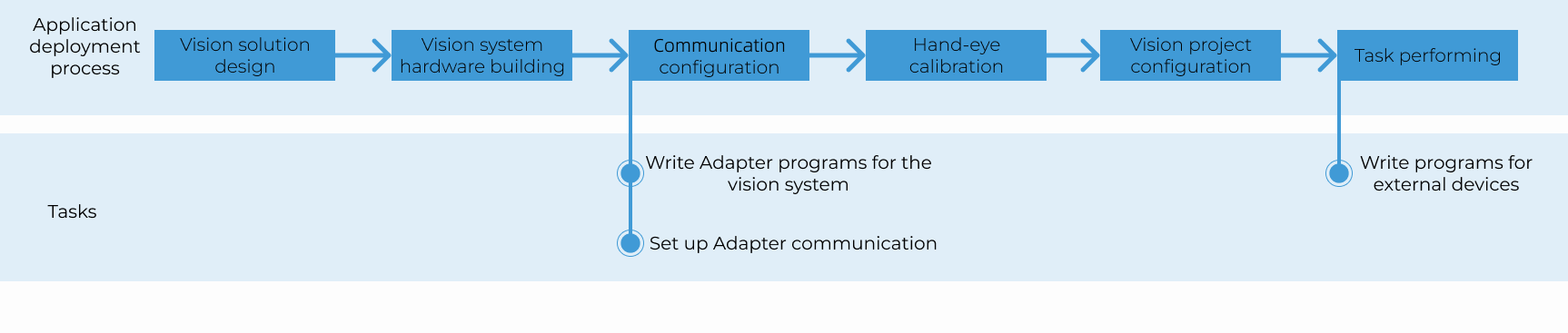
Écrire des programmes Adapter pour le système de vision |
Les programmes Adapter relient les dispositifs externes au système de vision. Les programmes Adapter communiquent en interne avec Mech-Vision et Mech-Viz et, en externe, avec des robots, des PLC ou des ordinateurs hôtes. Les programmes Adapter sont écrits en Python en utilisant l’une des méthodes suivantes:
|
Configurer la communication via Adapter |
Configurez les programmes Adapter dans le système de vision afin de vous assurer que la communication via Adapter est prise en charge dans le système de vision. Pour plus d’informations, voir Aperçu rapide d’Adapter. |
Écrire des programmes pour les dispositifs externes |
Les programmes des dispositifs externes obtiennent, depuis le système de vision, les informations sur les objets ou la trajectoire de mouvement du robot, puis guident le robot, le PLC ou l’ordinateur hôte afin d’exécuter les opérations en conséquence. |