Configuration de la communication Master-Control
Ce guide explique comment configurer la communication Master-Control avec un robot FANUC.
Préparation
Vérifier les versions du contrôleur et des logiciels
|
Les modèles et versions indiqués ci-dessous ont été testés et peuvent être utilisés. Pour d’autres modèles et versions, vous pouvez vous référer à ce guide pour la procédure d’utilisation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. |
-
Version du système du contrôleur : V7.5, V7.7, V8.x, V9.x et V10.1
Cliquez ici pour les instructions
-
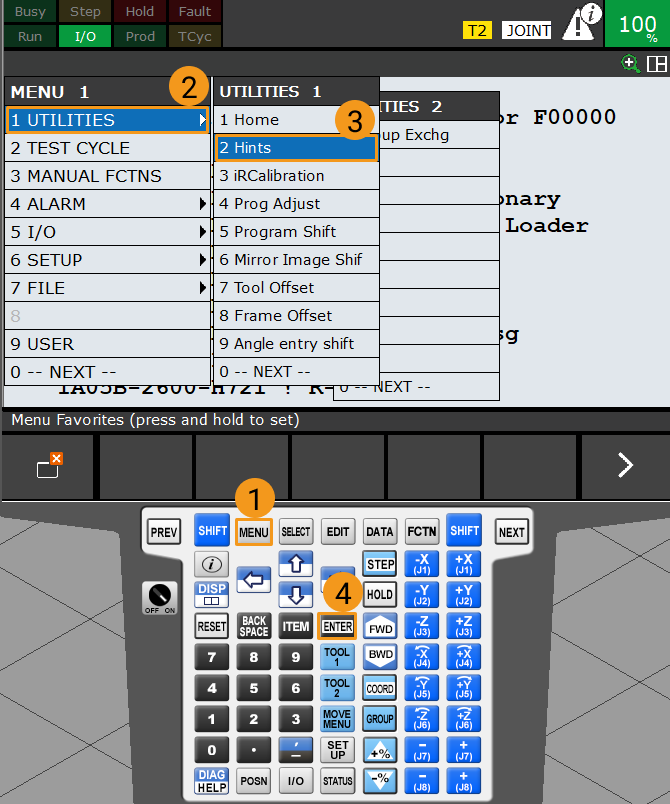
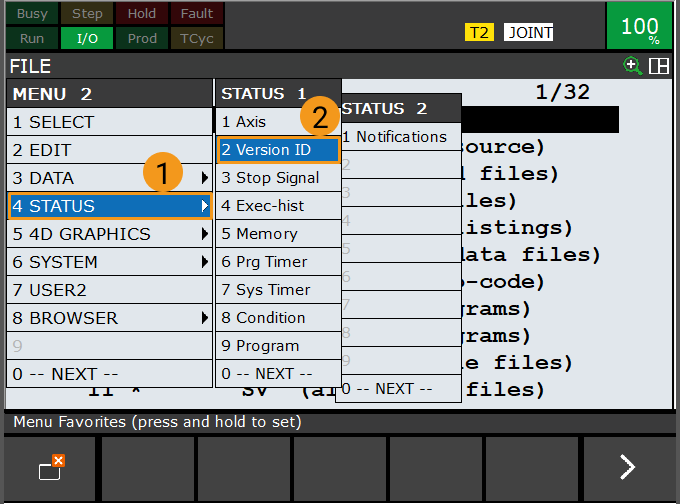
Appuyez sur la touche MENU du panneau de programmation, sélectionnez à l’aide des touches fléchées, puis appuyez sur ENTRÉE.
-
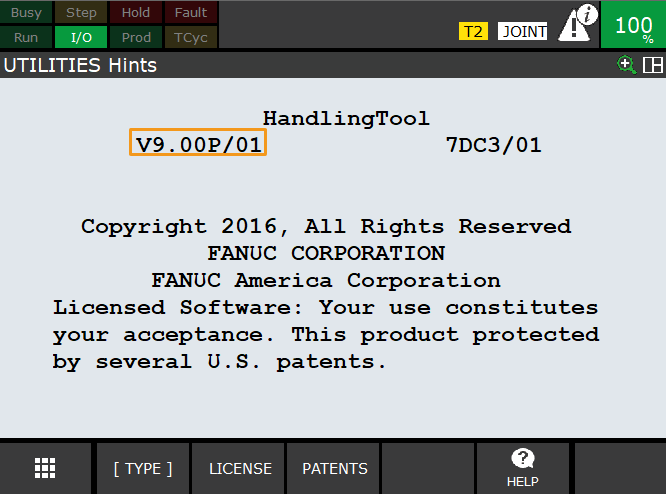
Dans l’interface « UTILITIES Conseils », la zone sélectionnée sur l’image correspond à la version du système du contrôleur du robot.
-
-
Assurez-vous que les paquets logiciels supplémentaires requis du contrôleur sont installés :
-
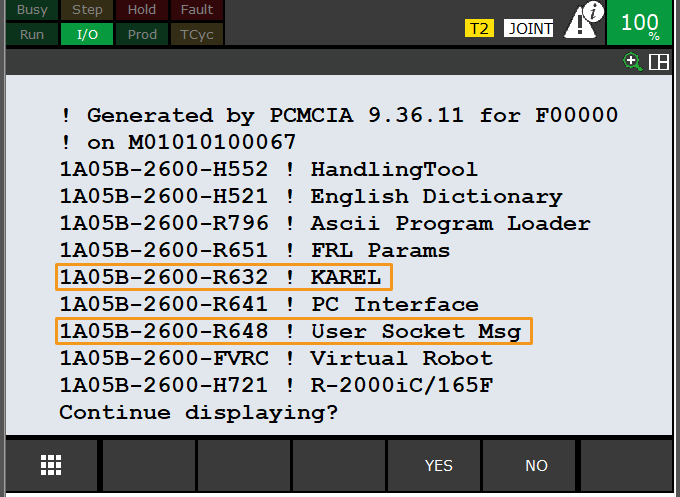
R651 ou R632 (KAREL) DOIT être installé.
-
R648 (User Socket Msg) DOIT être installé.
Cliquez ici pour les instructions
-
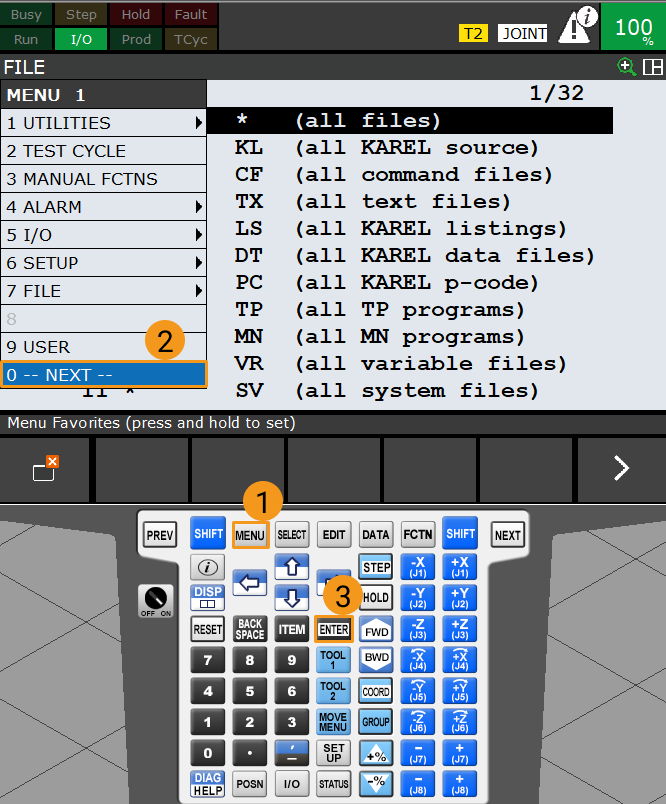
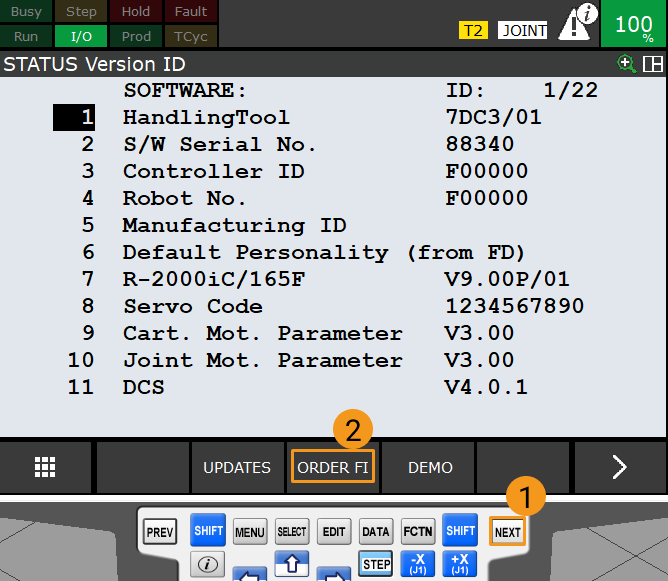
Appuyez sur la touche MENU du panneau de programmation. Sélectionnez SUIVANT à l’aide des touches fléchées, puis appuyez sur ENTRÉE.
-
Sélectionnez à l’aide des touches fléchées, puis appuyez sur ENTRÉE.
-
Appuyez sur SUIVANT, puis appuyez sur F3 (c.-à-d. sélectionnez ORDER FI).
-
Assurez-vous que les paquets logiciels requis sont installés comme indiqué sur l’image ci-dessous.
-
Configurer la connexion réseau
Connecter le matériel
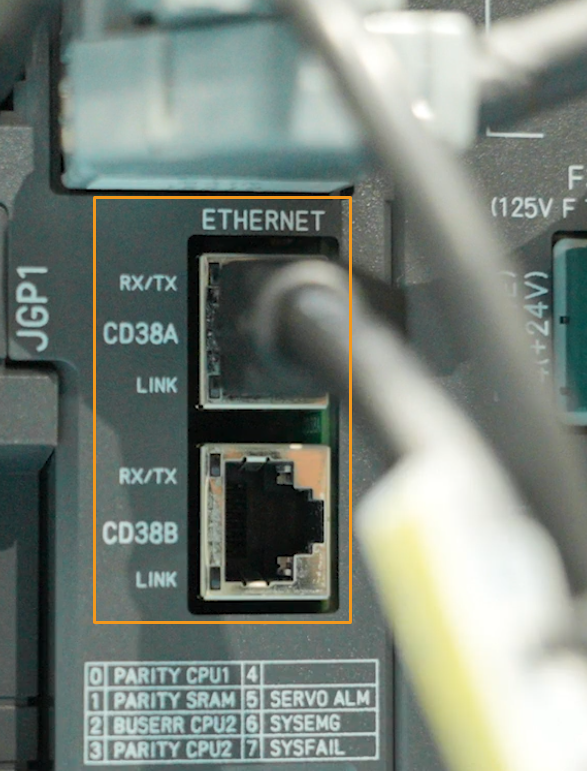
Branchez le câble Ethernet de l’IPC sur le port Ethernet du contrôleur du robot comme illustré. Vous pouvez connecter le câble au port CD38A ou au port CD38B. CD38A correspond au Port n°1 dans le paramétrage IP du robot, tandis que CD38B correspond au Port n°2.
Définir l’adresse IP
-
Appuyez sur MENU sur le panneau de programmation. Sélectionnez à l’aide des touches fléchées. Appuyez sur ENTRÉE pour ouvrir la fenêtre SETUP Protocols.

-
Sélectionnez TCP/IP et appuyez sur F3 (c.-à-d. sélectionnez DÉTAIL) pour ouvrir la fenêtre SETUP Host Comm.

-
Effectuez les opérations correspondantes selon le port auquel le câble Ethernet est connecté.
Si le Port 1 et le Port 2 sont tous deux activés, leurs adresses IP doivent se trouver sur des sous-réseaux différents. -
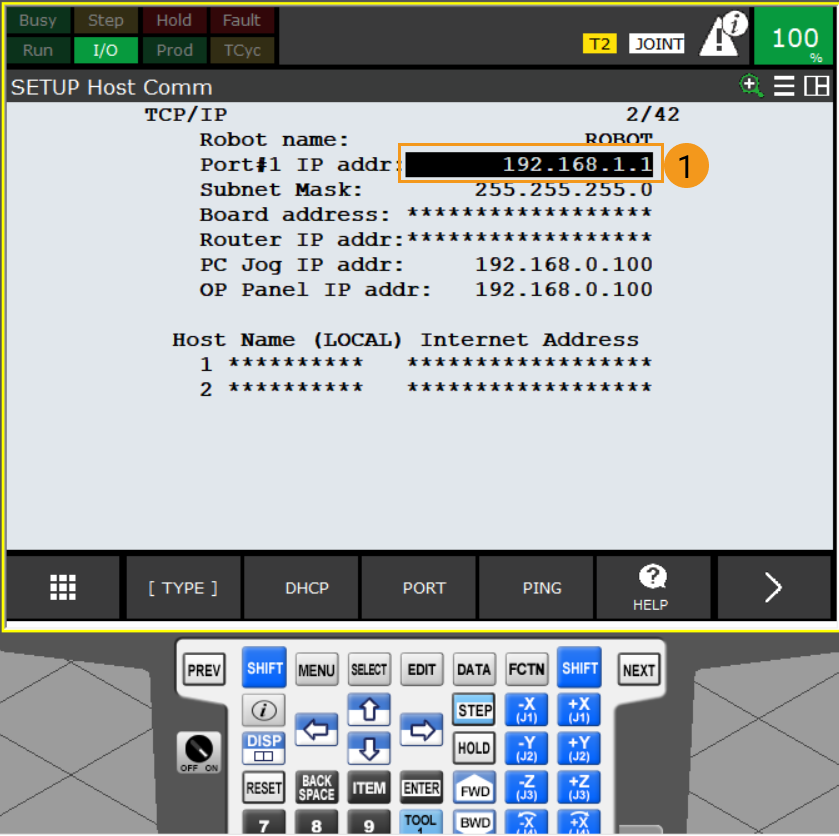
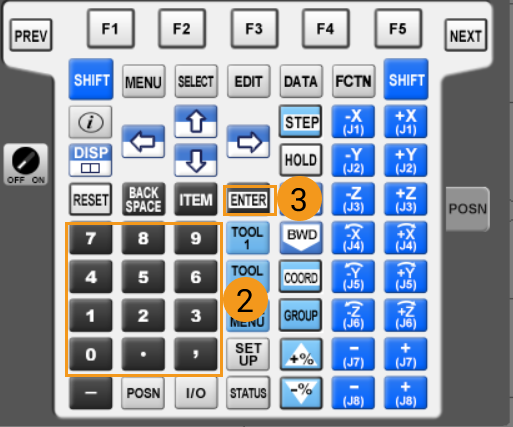
Si le câble Ethernet est connecté au port CD38A (Port n°1), modifiez l’adresse IP du robot comme suit : sélectionnez la ligne Adresse IP à l’aide des touches fléchées, appuyez sur la touche ENTRÉE, saisissez l’adresse IP du robot à l’aide du clavier du panneau de programmation, puis appuyez sur ENTRÉE. Veuillez noter que l’adresse IP du robot doit être sur le même sous-réseau que celle de l’IPC et que les deux adresses IP doivent être différentes.
-
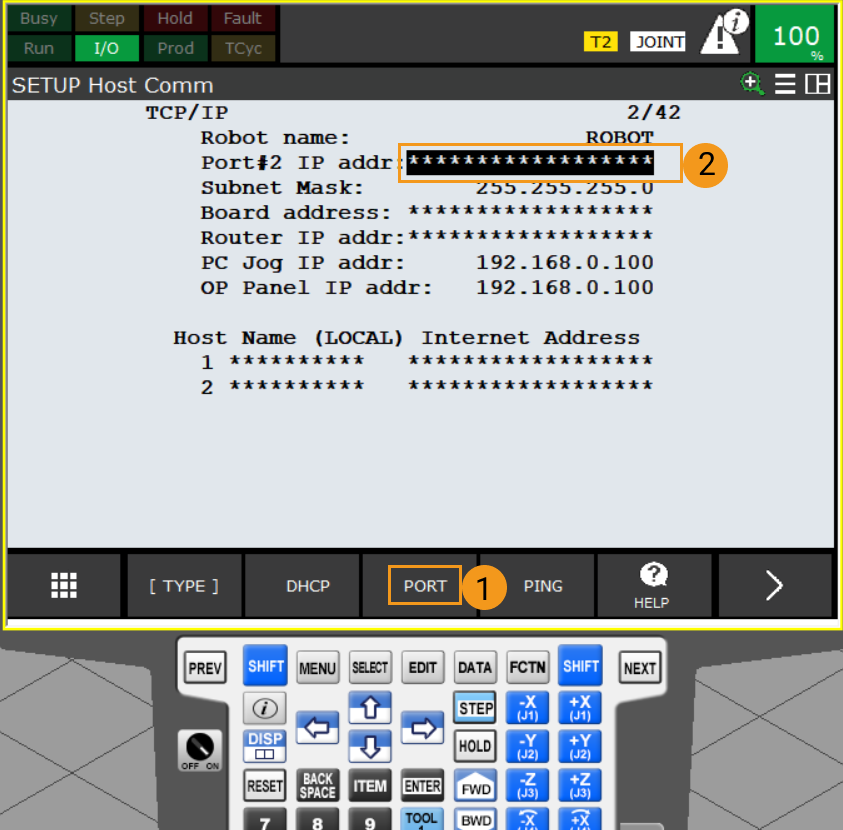
Si le câble Ethernet est connecté au port CD38B (Port n°2), modifiez l’adresse IP du robot comme suit : Appuyez sur F3 (c.-à-d. sélectionnez PORT) pour passer au Port n°2. Sélectionnez la ligne Adresse IP à l’aide des touches fléchées, appuyez sur la touche ENTRÉE, saisissez l’adresse IP du robot à l’aide du clavier du panneau de programmation, puis appuyez sur ENTRÉE. Veuillez noter que l’adresse IP du robot doit être sur le même sous-réseau que celle de l’IPC et que les deux adresses IP doivent être différentes.
-
Charger les fichiers de programme sur le robot
Sauvegarder les fichiers de programme du robot
-
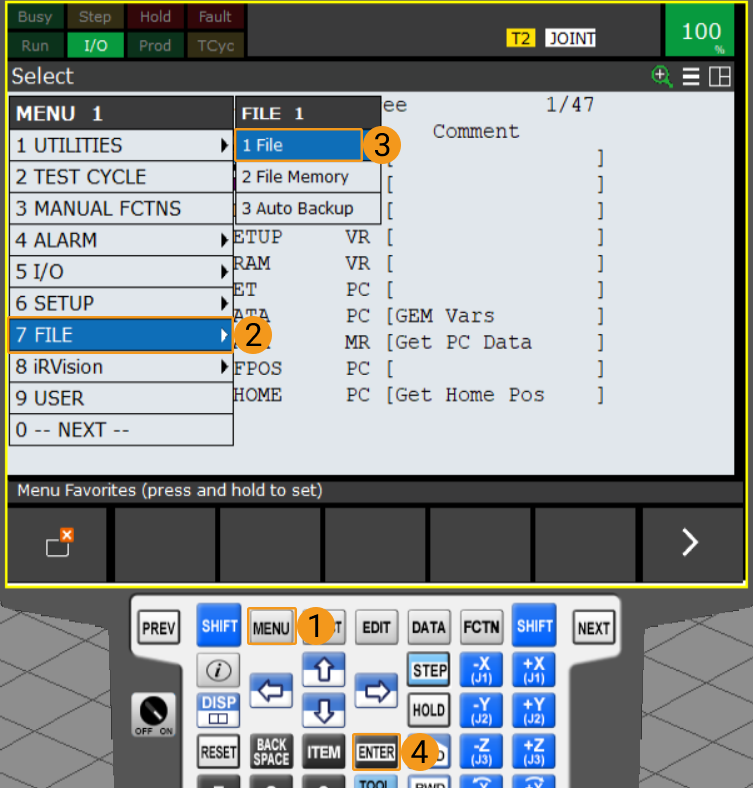
Branchez la clé USB et appuyez sur MENU. Sélectionnez à l’aide des touches fléchées. Ensuite, appuyez sur ENTRÉE pour ouvrir la fenêtre FILE.
-
Veuillez vous assurer que votre clé USB ne dépasse pas 32 Go et que le système de fichiers de la clé est FAT32.
-
Vous pouvez connecter la clé USB au contrôleur du robot ou au panneau de programmation en fonction du besoin réel.
-
-
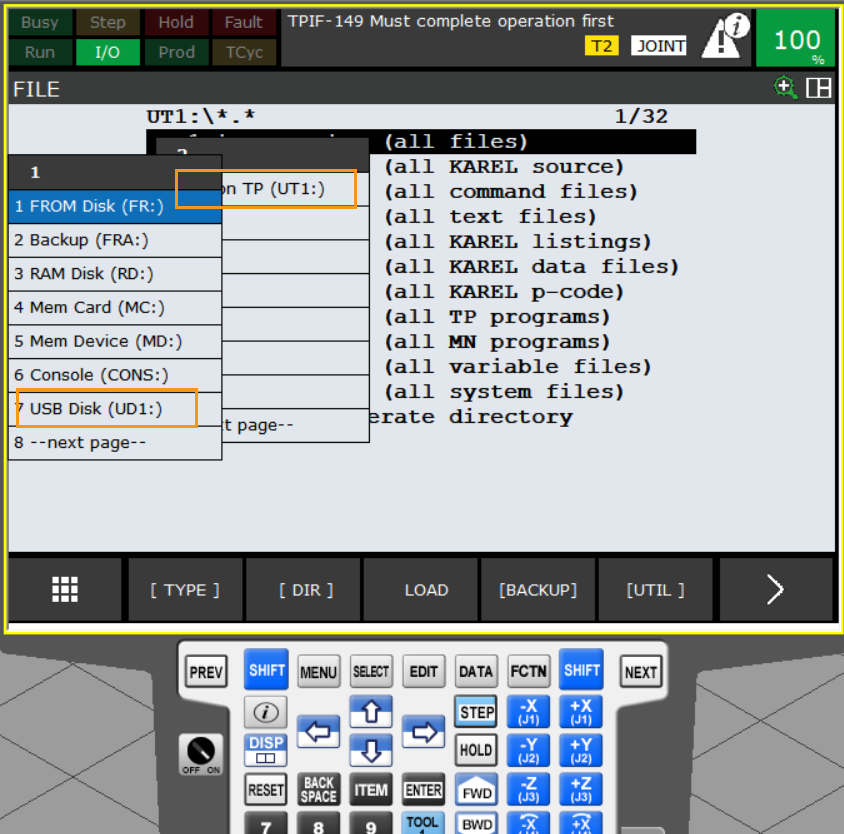
Dans la fenêtre FILE, appuyez sur F5 (c.-à-d. sélectionnez UTIL). Sélectionnez Définir le périphérique à l’aide des touches fléchées et appuyez sur ENTRÉE pour ouvrir le dossier USB.
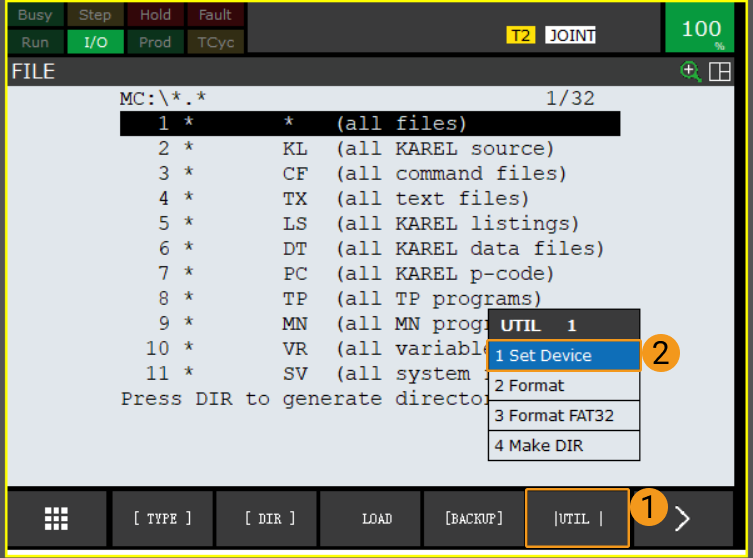
-
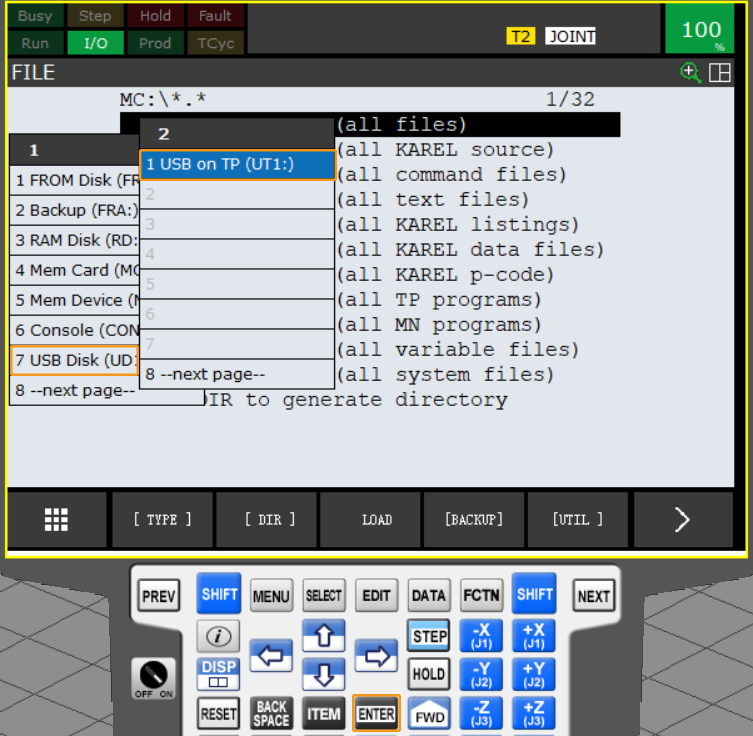
Si votre clé USB est connectée au contrôleur, sélectionnez USB Disk (UD1:) à l’aide des touches fléchées, et appuyez sur ENTRÉE. Si votre clé USB est connectée au panneau de programmation, sélectionnez USB on TP (UT1:) à l’aide des touches fléchées, et appuyez sur ENTRÉE.
-
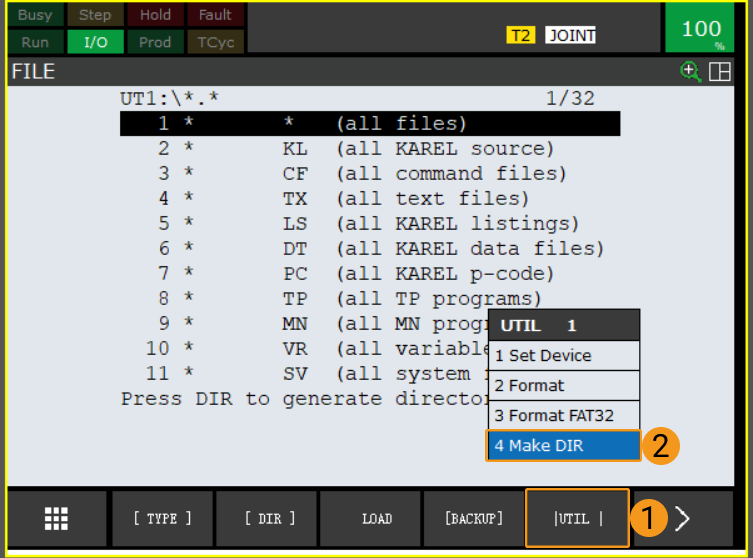
Dans la fenêtre USB FILE, appuyez sur F5 (c.-à-d. sélectionnez UTIL). Sélectionnez Créer DIR, puis appuyez sur ENTRÉE.
-
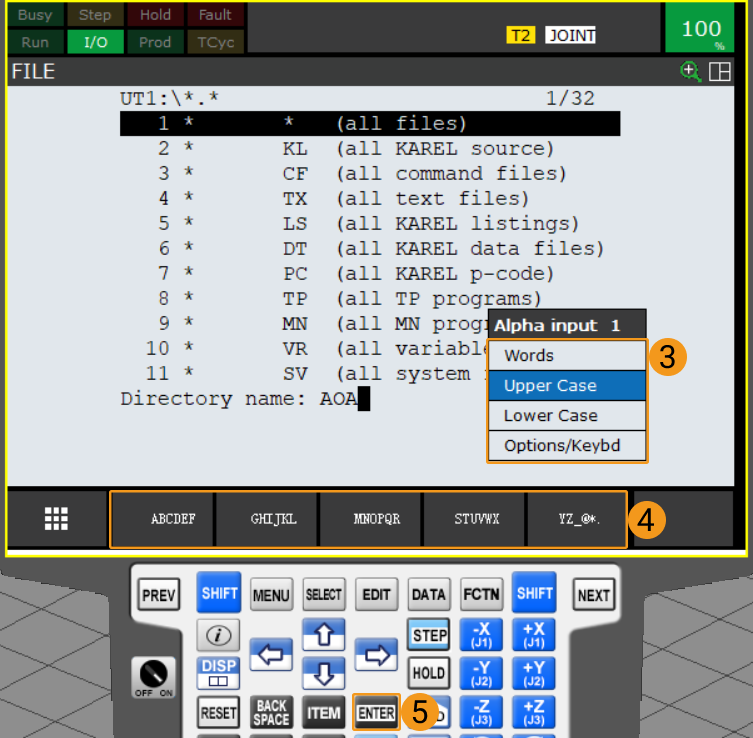
Sélectionnez Mots, Majuscules, Minuscules ou Options/Clavier et utilisez les touches F1~F5 pour nommer le dossier, par exemple AOA. Ensuite, appuyez sur ENTRÉE pour confirmer et entrer dans le nouveau dossier.
-
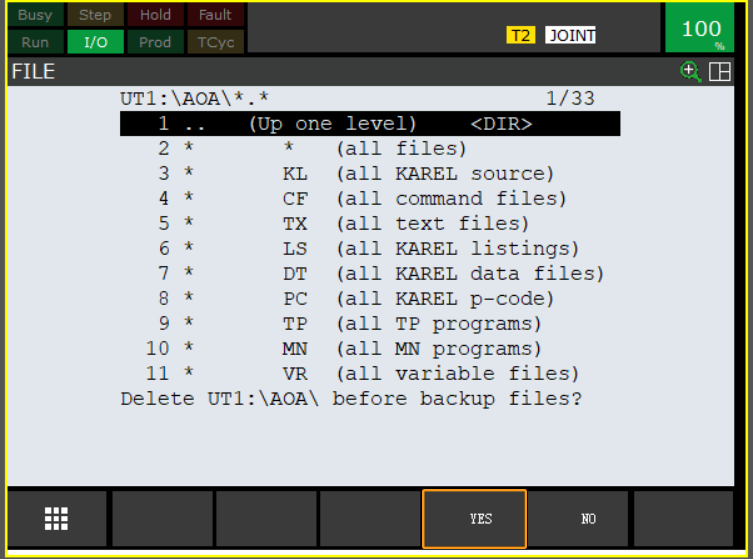
Appuyez sur F4 (c.-à-d. sélectionnez SAUVEGARDE). Sélectionnez Tout ce qui précède avec les touches fléchées, et appuyez sur ENTRÉE pour sauvegarder les fichiers.

-
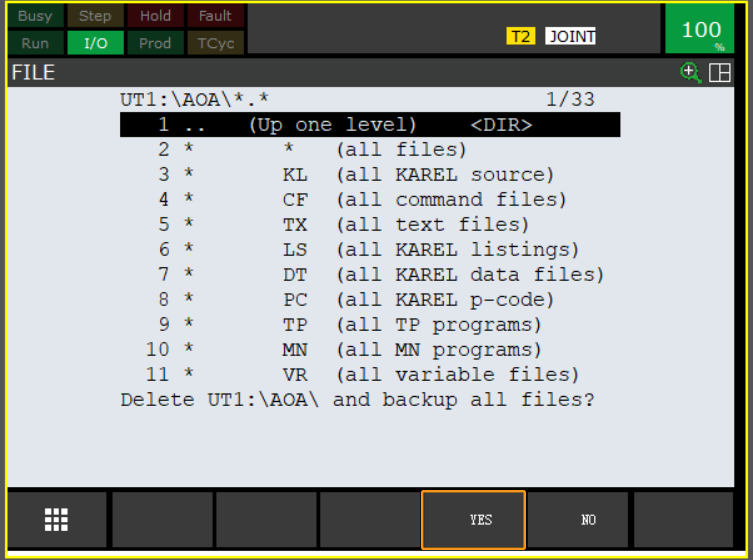
Un message demandant s’il faut supprimer le nouveau dossier après la sauvegarde des fichiers s’affichera à l’écran. Appuyez sur F4 pour sélectionner OUI. Ensuite, un message demandant s’il faut sauvegarder tous les fichiers s’affichera à l’écran. Appuyez sur F4 pour sélectionner OUI.
-
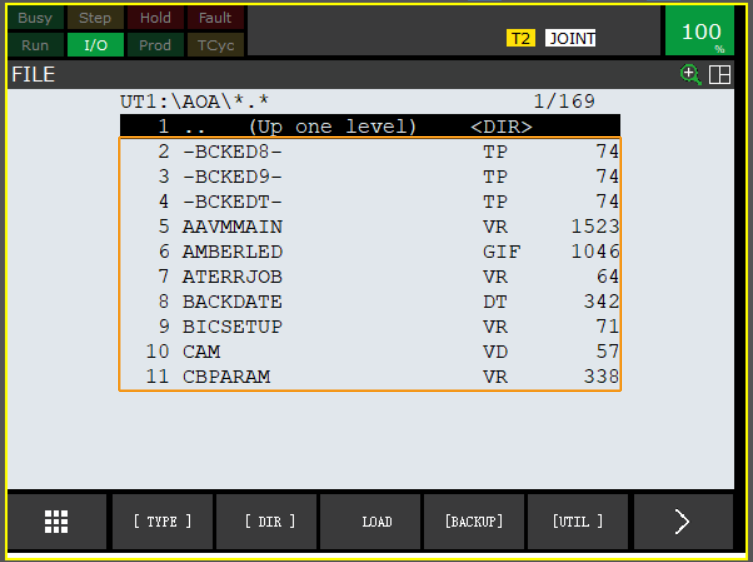
Après la fin de la sauvegarde, sélectionnez tous les fichiers à l’aide des touches fléchées, puis appuyez sur ENTRÉE pour afficher tous les fichiers sauvegardés.

Préparer les fichiers de programme
Accédez à Communication Component/Robot_Server/Robot_FullControl/fanuc depuis le répertoire d’installation de Mech-Vision & Mech-Viz, puis copiez tous les fichiers et dossiers de ce dossier et collez-les à la racine de la clé USB.
|
Charger les fichiers sur le robot
-
Branchez la clé USB et appuyez sur MENU. Sélectionnez à l’aide des touches fléchées. Ensuite, appuyez sur ENTRÉE pour ouvrir la fenêtre FILE.
Vous pouvez connecter la clé USB au contrôleur du robot ou au panneau de programmation en fonction du besoin réel.

-
Appuyez sur F5 (c.-à-d. sélectionnez UTIL). Sélectionnez Définir le périphérique à l’aide des touches fléchées, et appuyez sur ENTRÉE pour ouvrir le dossier USB.

-
Si votre clé USB est connectée au contrôleur, sélectionnez USB Disk (UD1:) à l’aide des touches fléchées, et appuyez sur ENTRÉE. Si votre clé USB est connectée au panneau de programmation, sélectionnez USB on TP (UT1:) à l’aide des touches fléchées, et appuyez sur ENTRÉE.
-
Sélectionnez tous les fichiers à l’aide des touches fléchées, et appuyez sur ENTRÉE pour accéder au répertoire racine de la clé USB.

-
Dans le répertoire racine de la clé USB, sélectionnez INSTALL à l’aide des touches fléchées. Appuyez sur ENTRÉE, et appuyez sur F4 (c.-à-d. sélectionnez OUI) pour commencer le chargement des programmes.
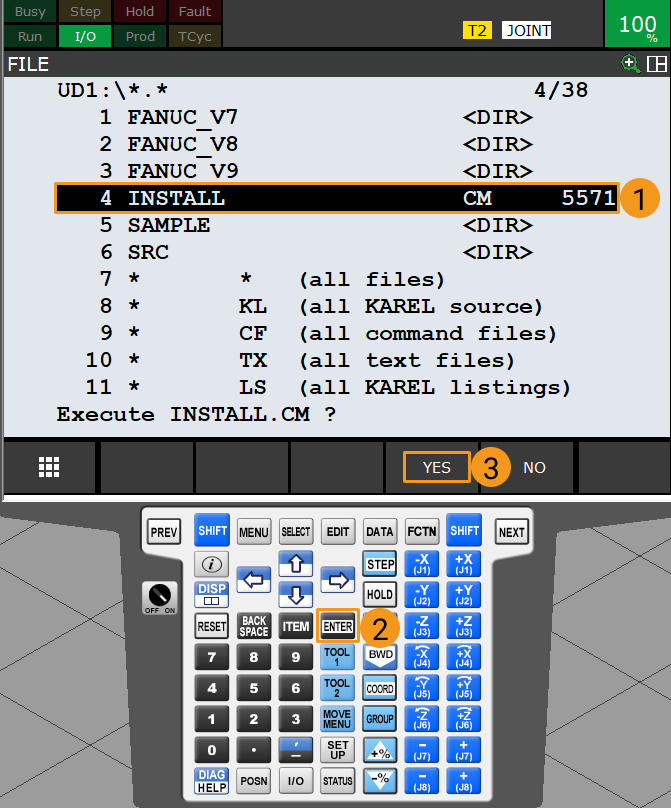
-
Lorsque le message « Programmes chargés » s’affiche, les fichiers de programme ont été chargés avec succès. Appuyez sur F4 (c.-à-d. sélectionnez OK) pour revenir à l’interface précédente.
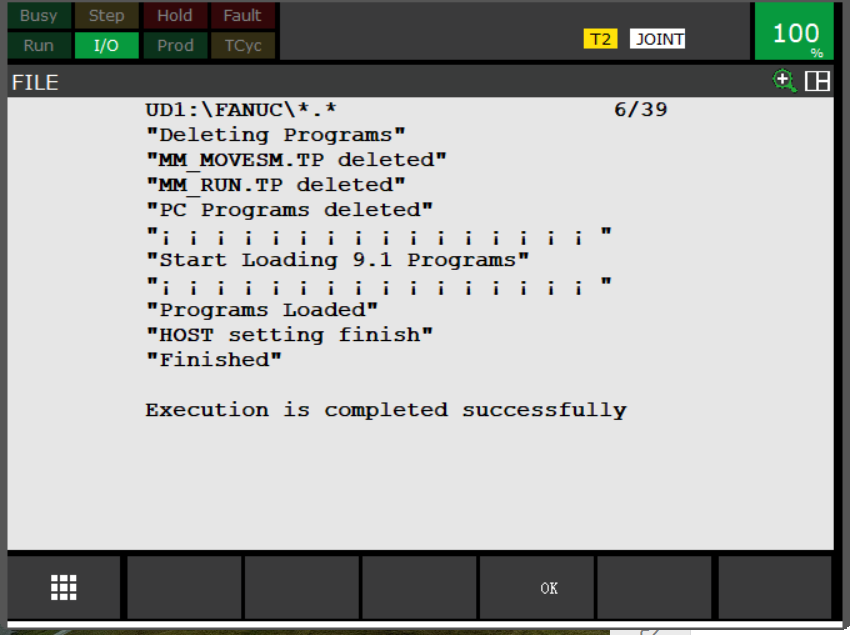
-
Redémarrez le robot.
Tester la communication Master-Control
Exécuter le programme
-
Appuyez sur la touche SELECT sur le panneau de programmation pour ouvrir la fenêtre de sélection de programme, puis appuyez sur F1 (c.-à-d. sélectionnez TYPE). Sélectionnez TP Programs à l’aide des touches fléchées puis appuyez sur ENTRÉE.
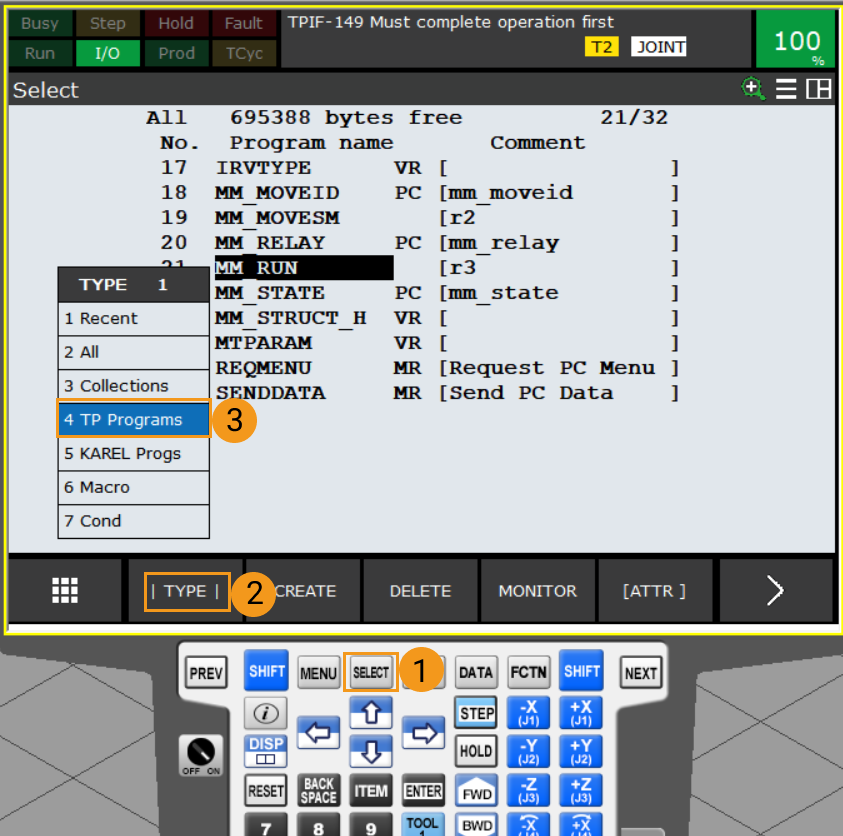
-
Sélectionnez MM_RUN à l’aide des touches fléchées, puis appuyez sur ENTRÉE.

-
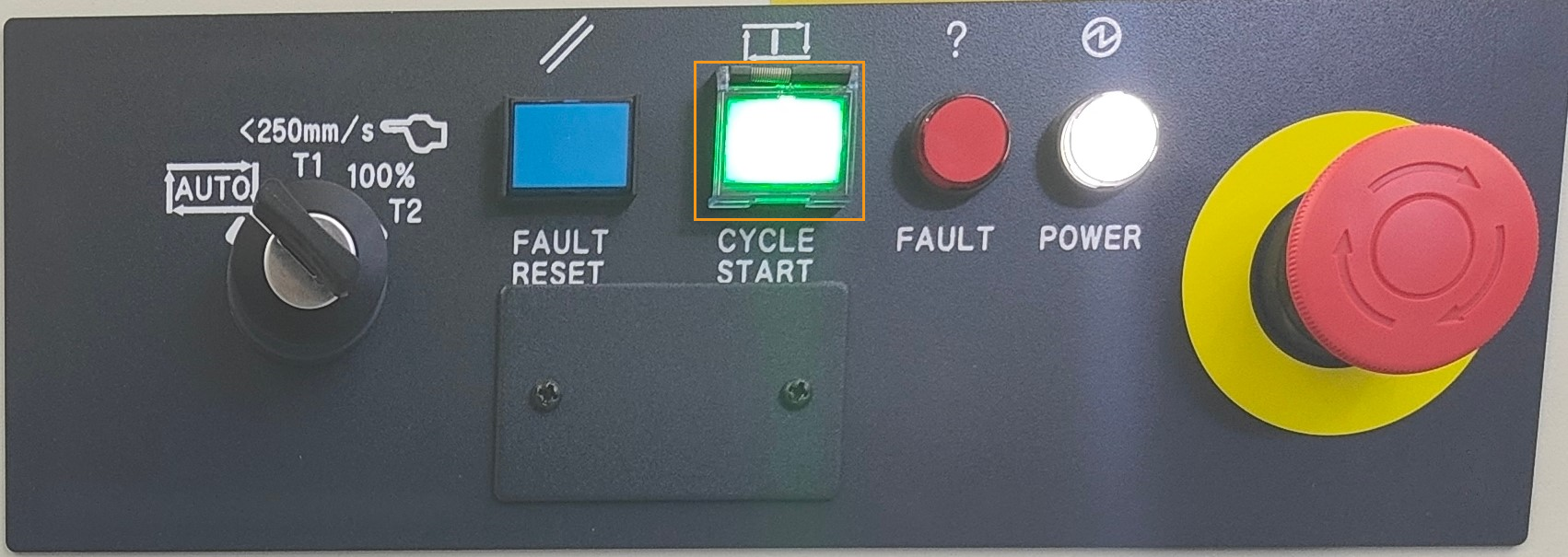
Tournez l’interrupteur à clé sur le contrôleur sur AUTO.
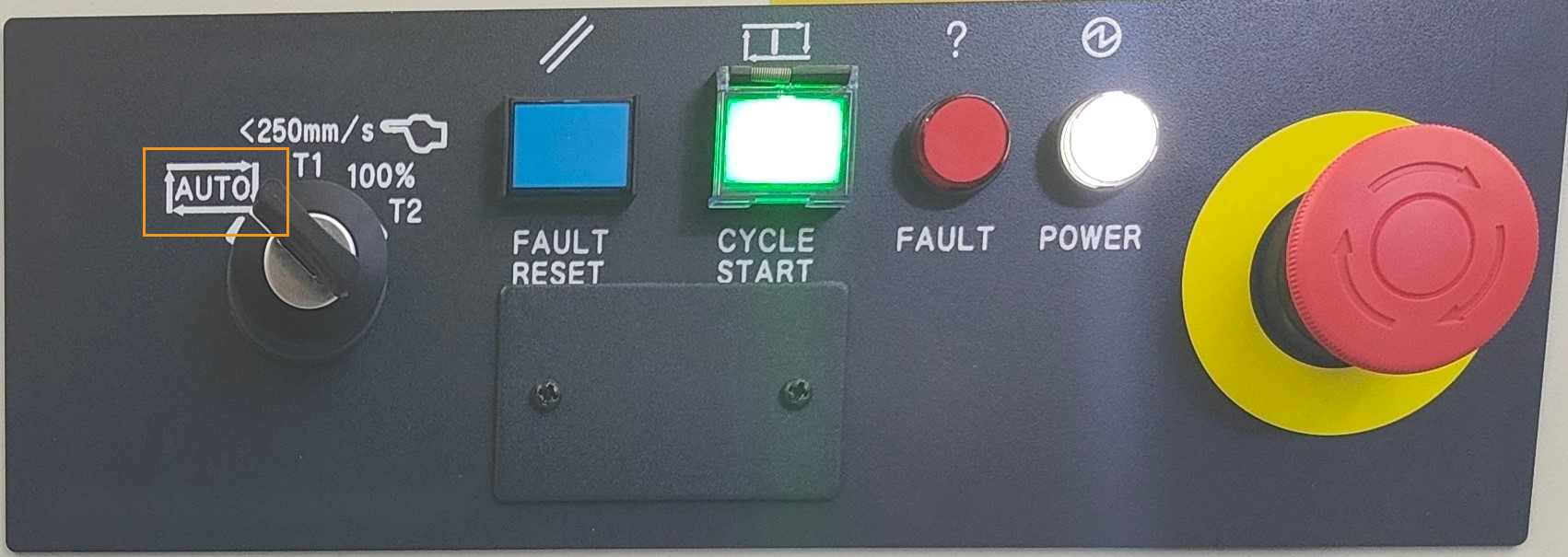
-
Mettez l’interrupteur sur le panneau de programmation sur OFF.

-
Appuyez sur le bouton CYCLE START sur le contrôleur pour exécuter le programme automatiquement.
-
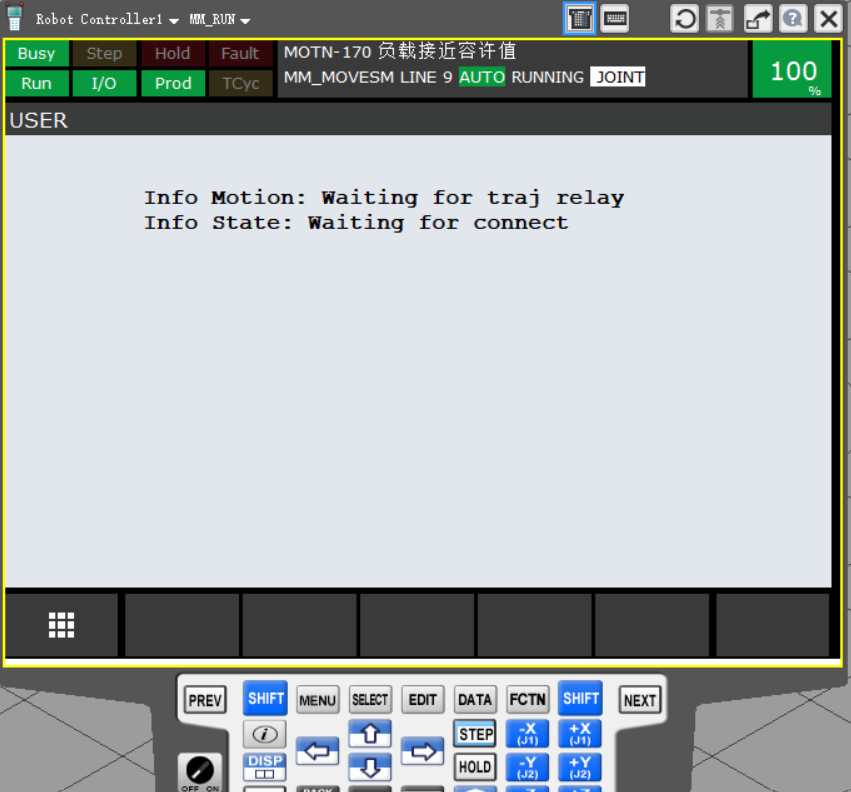
Lorsque État info : En attente de connexion s’affiche dans l’interface du panneau de programmation, le programme a été exécuté avec succès.
Créer un projet Mech-Viz
-
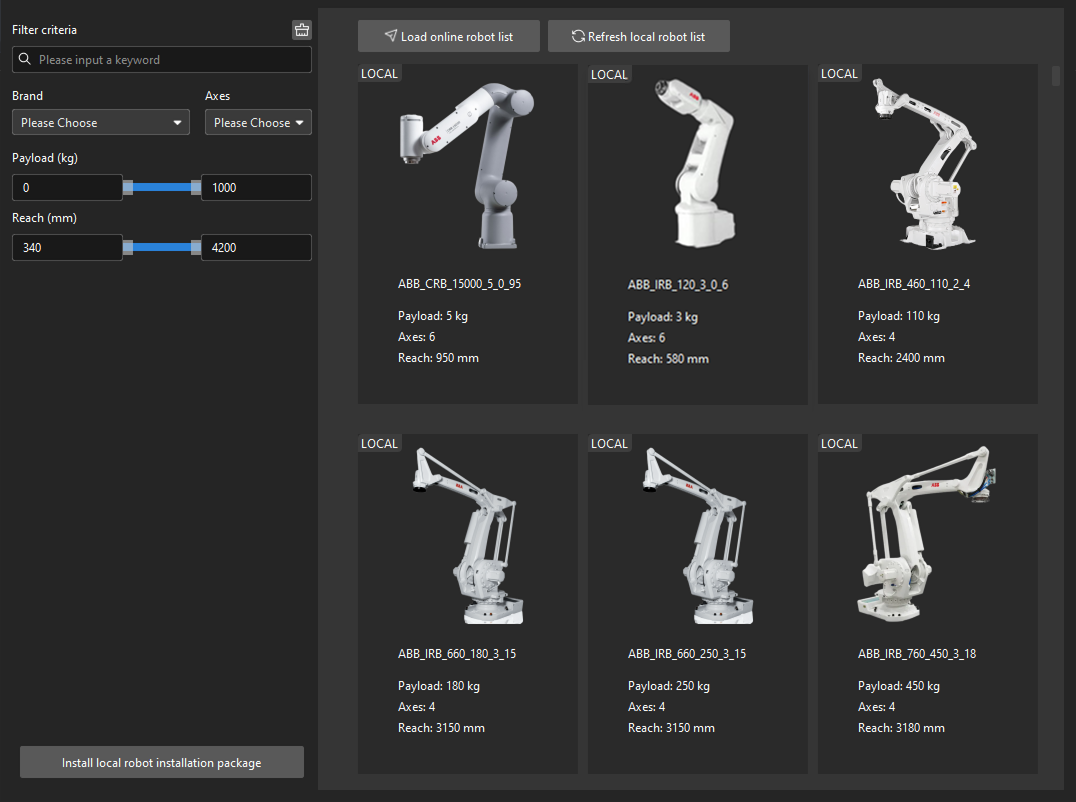
Ouvrez Mech-Viz, appuyez sur Ctrl + N au clavier pour créer un nouveau projet. Sélectionnez le modèle de robot correspondant à la marque et au modèle de votre robot réel sur l’interface, comme illustré ci-dessous.
-
Appuyez sur Ctrl + S et créez ou sélectionnez un dossier pour enregistrer le projet.
-
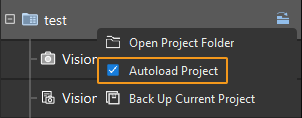
Cliquez avec le bouton droit sur le nom du projet dans le panneau de gauche de Mech-Viz et sélectionnez Chargement automatique du projet.
Connecter le robot
-
Cliquez sur Maître-Contrôle du robot dans la barre d’outils de Mech-Viz.
-
Saisissez l’adresse IP du robot réel dans Adresse IP du robot (l’adresse IP dans l’image n’est qu’un exemple). Cliquez sur Connecter le robot.
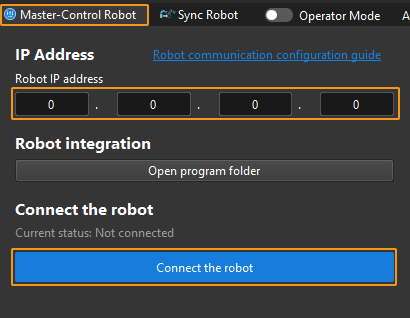
Si Mech-Viz connecte le robot réel avec succès, l’état actuel passera à Connecté. Pendant ce temps, l’icône dans la barre d’outils passera du bleu au vert.
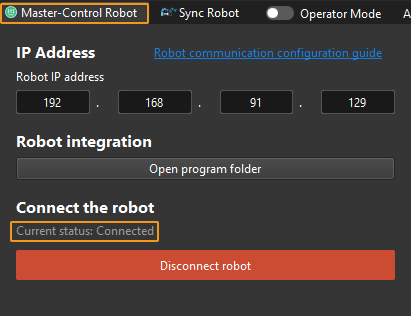
Si la connexion échoue, veuillez vérifier de nouveau l’adresse IP du robot.
Déplacer le robot
-
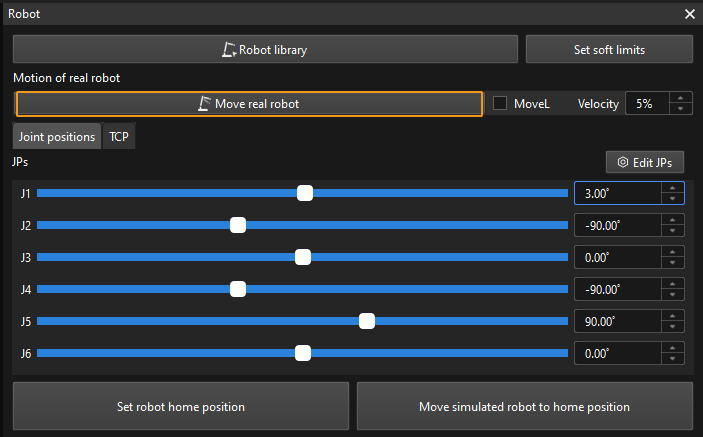
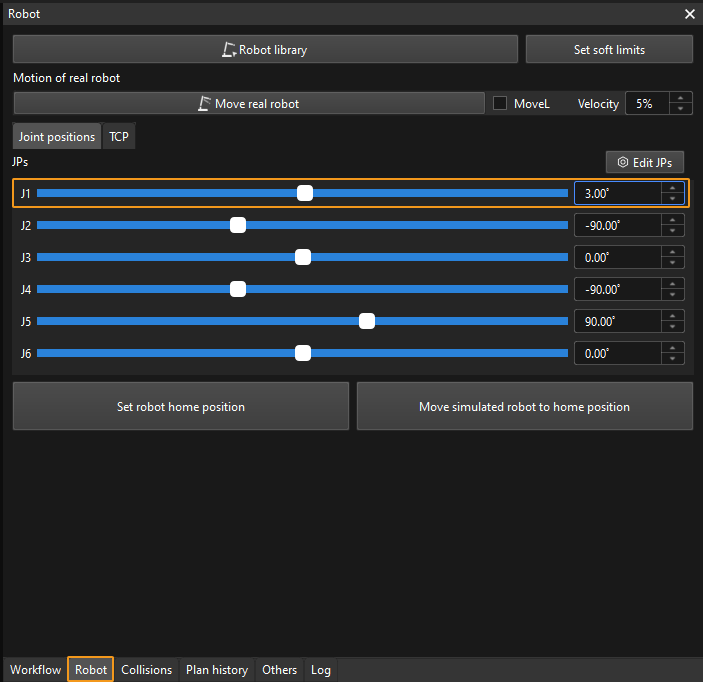
Dans la barre d’outils de Mech-Viz, changez les paramètres « Vel. » (vitesse) et « Acc. » (accélération) à 5 %.

-
Cliquez sur Synchroniser le robot dans la barre d’outils, et vous pouvez synchroniser les poses du robot simulé dans l’espace de simulation 3D avec les poses du robot réel. Cliquez ensuite à nouveau sur Synchroniser le robot pour le désélectionner.

-
Dans l’onglet Robot, ajustez légèrement la valeur de « J1 », par exemple de 0˚ à 3˚. Cette opération déplacera le robot simulé.
-
Cliquez sur Déplacer le robot réel et vérifiez si le robot réel a bougé. Si le robot réel a atteint les JPs définis pour le robot simulé, la communication maître-contrôle fonctionne.
Lors du déplacement du robot, veuillez assurer la sécurité du personnel. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur le boîtier d’enseignement !