Configurer la communication via l’interface standard avec JAKA
Ce guide explique comment configurer la communication via l’interface standard avec un robot JAKA.
Vérifier la compatibilité du contrôleur et du logiciel
Avant de charger le programme de l’interface standard, veuillez vérifier que la version du logiciel du contrôleur est 1.7.
-
Si la version du contrôleur du robot est inférieure à 1.7, veuillez la mettre à jour vers 1.7. Les étapes suivantes impliquent le programme JAKA AddOn, qui nécessite une version 1.7 du programme du contrôleur.
La version 1.7 est celle utilisée pour l’adaptation. Pour les versions ultérieures à 1.7, vous pouvez vous référer à ce guide pour l’exploitation. En cas de problème, veuillez contacter l’assistance technique de Mech-Mind. -
S’il est difficile de mettre à jour la version du logiciel du contrôleur, les utilisateurs peuvent modifier le programme JAKA pour prendre en charge la communication via l’interface standard. Cette méthode permet d’éviter l’installation du plugin JAKA AddOn et n’impose aucune exigence particulière quant à la version du logiciel du contrôleur.
Configurer la connexion réseau
Connecter le matériel
Vous pouvez choisir l’une des deux méthodes suivantes pour effectuer la configuration matérielle :
-
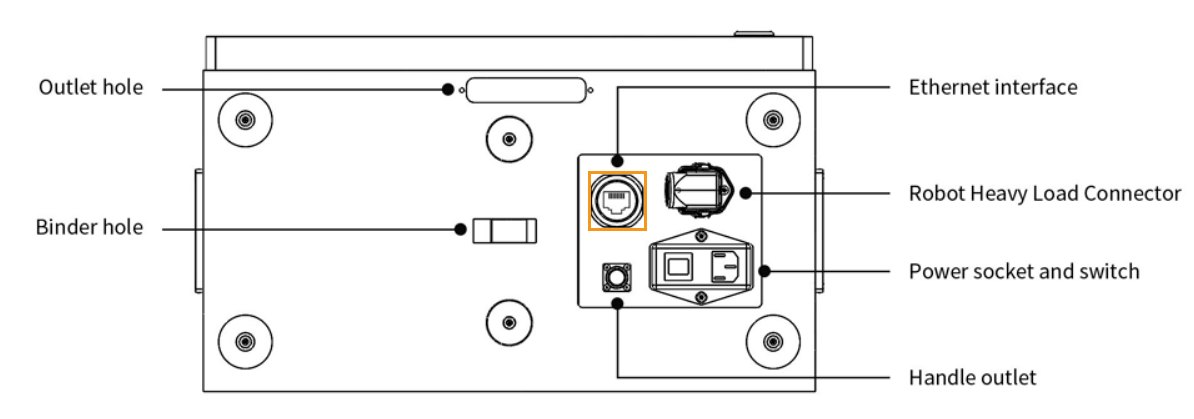
Branchez le câble Ethernet de l’IPC dans l’interface Ethernet à l’intérieur du panneau d’accessoires sur l’avant du contrôleur, comme illustré ci-dessous.
-
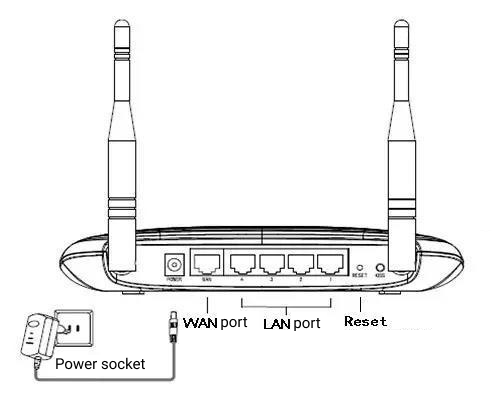
Connectez l’IPC et le contrôleur au même routeur avec des câbles Ethernet. Les adresses IP des deux doivent être dans le même sous-réseau.
Configurer l’adresse IP
-
Sur l’IPC, rendez-vous sur le site officiel de JAKA pour télécharger le logiciel JAKA Zu App. Veillez à ce que la version de JAKA Zu App soit cohérente avec la version du contrôleur.
-
Si vous utilisez un pupitre d’enseignement (teach pendant), vous n’avez pas besoin de télécharger JAKA Zu App. Dans ce cas, passez cette étape.
-
Dans cet exemple, JAKA Zu App V1.7.0 est utilisée. Si vous utilisez une version différente, l’interface et les fonctionnalités peuvent légèrement varier, mais cet exemple peut tout de même servir de référence.
-
-
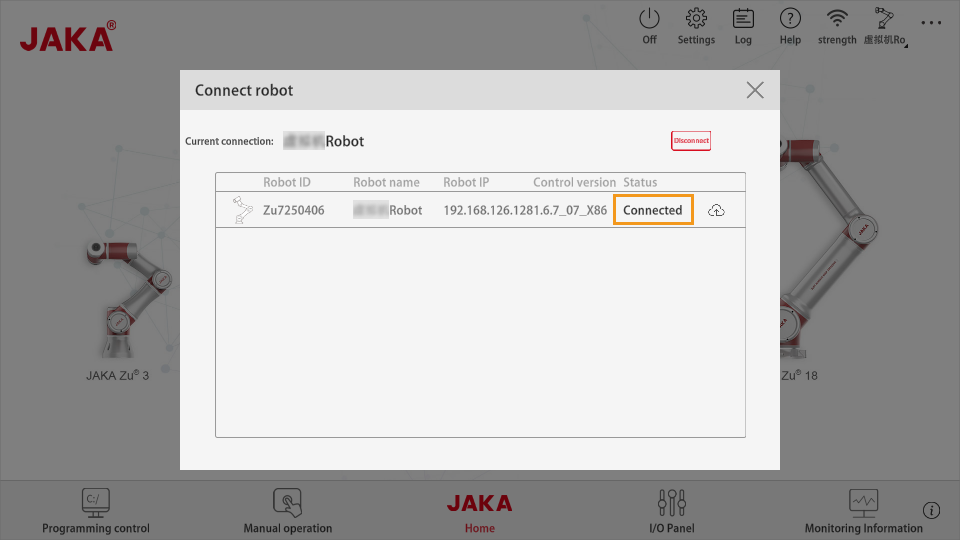
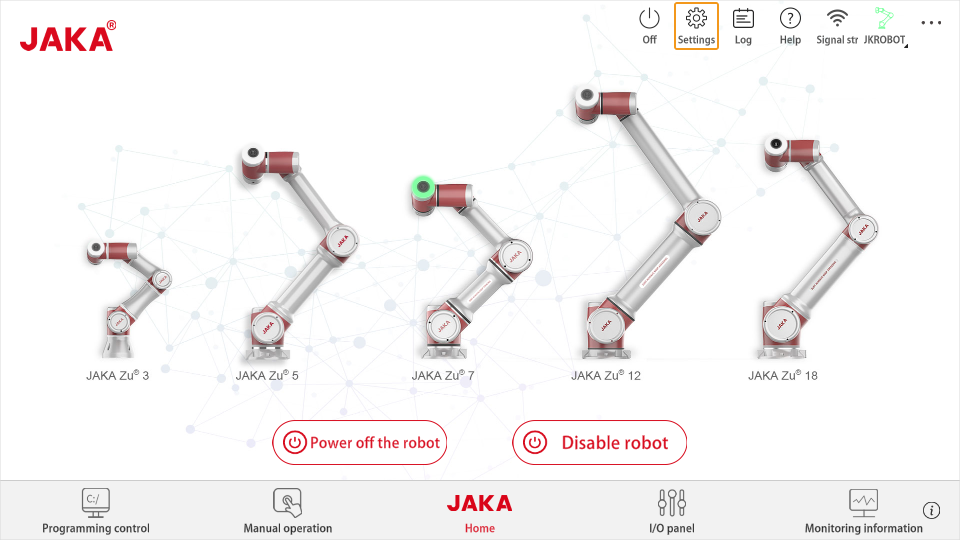
Ouvrez JAKA APP, cliquez sur Déconnecté en haut à droite pour Connecter le robot, puis cliquez sur
 pour saisir le mot de passe.
pour saisir le mot de passe.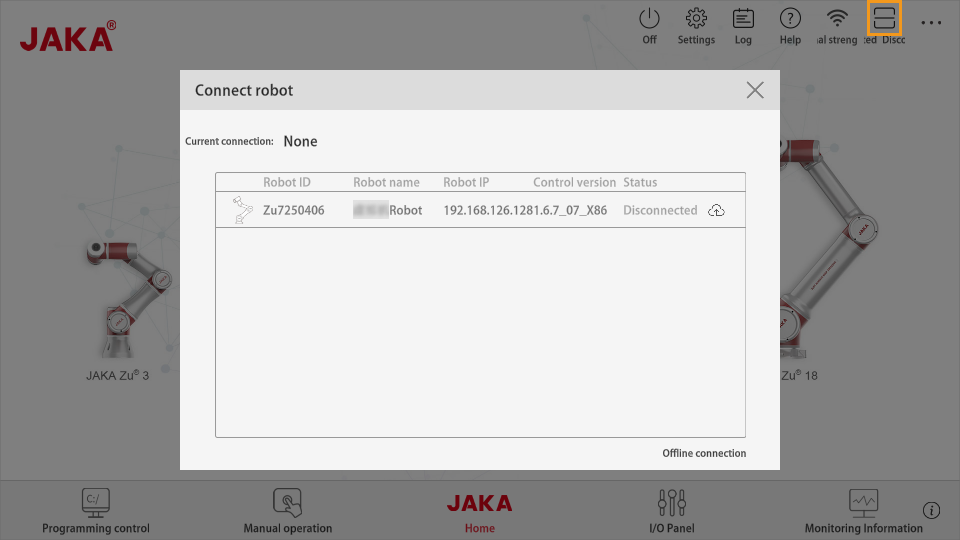
-
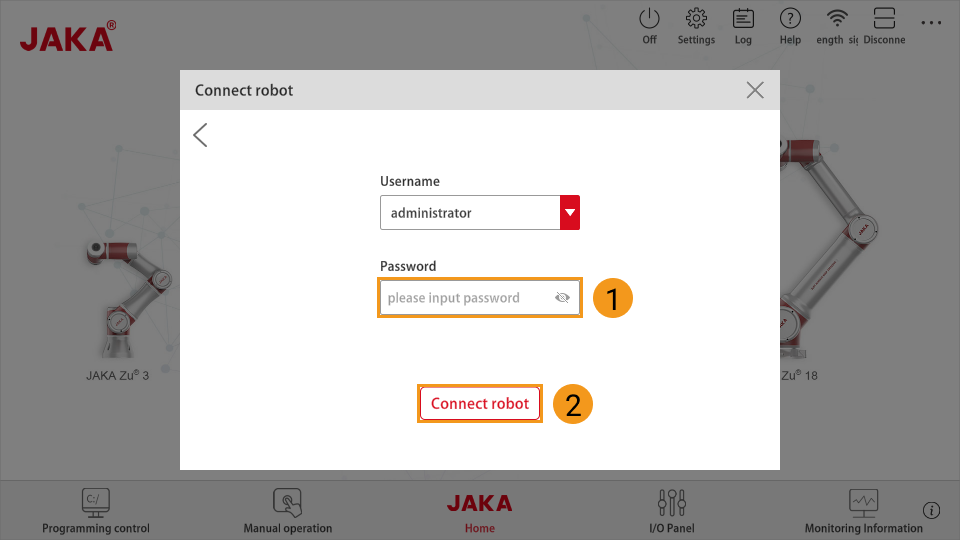
Saisissez le mot de passe de l’administrateur (le mot de passe par défaut est jakazuadmin), puis cliquez sur Connecter le robot.
-
En cas de connexion réussie, l’état du robot doit passer à Connecté.
-
Cliquez sur Mettre le robot sous tension puis sur Activer le robot pour mettre le robot sous tension.
Après la mise sous tension du robot, assurez-vous de saisir la valeur de charge de l’effecteur terminal. Sinon, le robot peut présenter des fluctuations verticales importantes au moment du démarrage, ce qui peut entraîner des dangers potentiels. 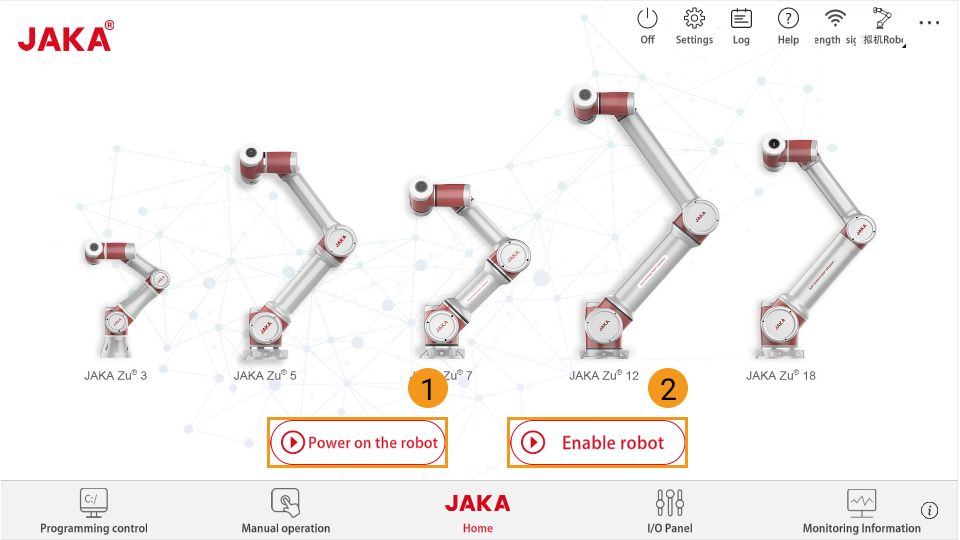
-
Cliquez sur Paramètres
 en haut à droite. Allez à pour définir l’adresse IP. JAKA APP doit être dans le même sous-réseau que l’IPC.
en haut à droite. Allez à pour définir l’adresse IP. JAKA APP doit être dans le même sous-réseau que l’IPC.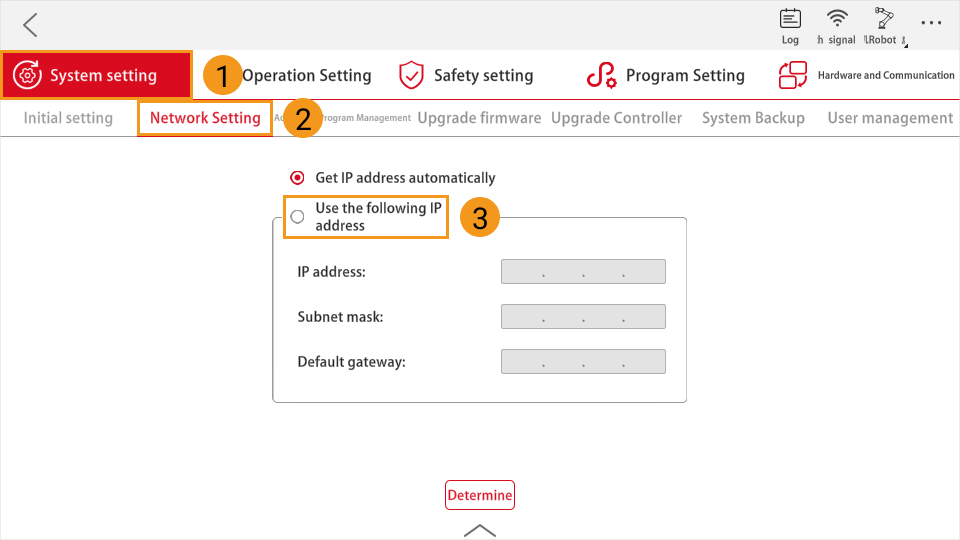
-
Sur l’IPC, configurer l’adresse IP de l’IPC.
Assurez-vous que les adresses IP de l’IPC et du robot sont sur le même sous-réseau.
Configurer la communication du robot
-
Ouvrez Mech-Vision, et vous pouvez accéder à différentes interfaces. Créez une nouvelle solution selon les instructions ci-dessous.
-
Si vous avez accédé à l’interface d’accueil, cliquez sur Nouvelle solution vierge.

-
Si vous avez accédé à l’interface principale, cliquez sur dans la barre de menus.

-
-
Cliquez sur Configuration de la communication du robot dans la barre d’outils de Mech-Vision.
-
Dans la fenêtre Configuration de la communication du robot, effectuez les configurations suivantes.
-
Cliquez sur le menu déroulant Sélectionner le robot, et choisissez Robot répertorié. Cliquez sur Sélectionner le modèle de robot, et sélectionnez le modèle de robot que vous utilisez. Puis, cliquez sur Suivant.
-
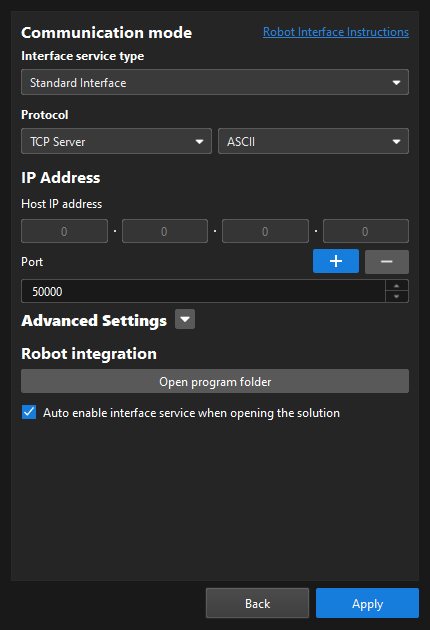
Dans la section Mode de communication, sélectionnez Interface standard pour Type de service d’interface, Serveur TCP pour Protocole, et ASCII pour le format de protocole.
-
Il est recommandé de définir le numéro de port à 50000 ou plus. Assurez-vous que le numéro de port n’est pas occupé par un autre programme.
-
(Optionnel) Sélectionnez Activer automatiquement le service d’interface à l’ouverture de la solution.
-
Cliquez sur Appliquer.
-
-
Sur l’interface principale de Mech-Vision, assurez-vous que le commutateur Configuration de la communication du robot dans la barre d’outils est basculé et est devenu bleu.

Charger les fichiers de programme sur le robot
Charger le fichier AddOn
-
Sur l’IPC, accédez à
Communication Component\Robot_Interface\Robot_Plugin\JAKA_Addon, ouvrez le dossier correspondant à votre version de contrôleur (par ex., 1.7.0), et copiez le fichier mm_custom_cmd.tar.gz sur l’appareil où se trouve JAKA Zu APP. -
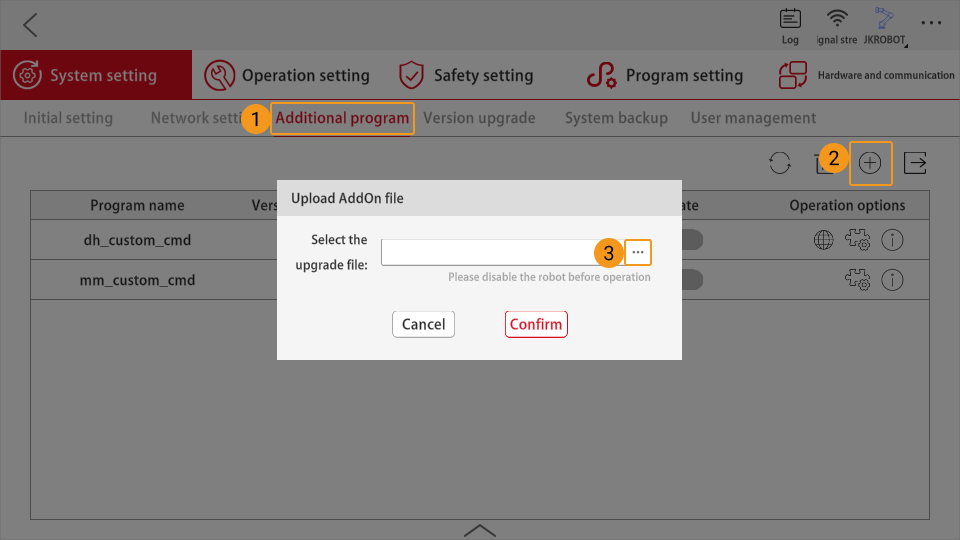
Cliquez sur Paramètres dans l’angle supérieur droit.
-
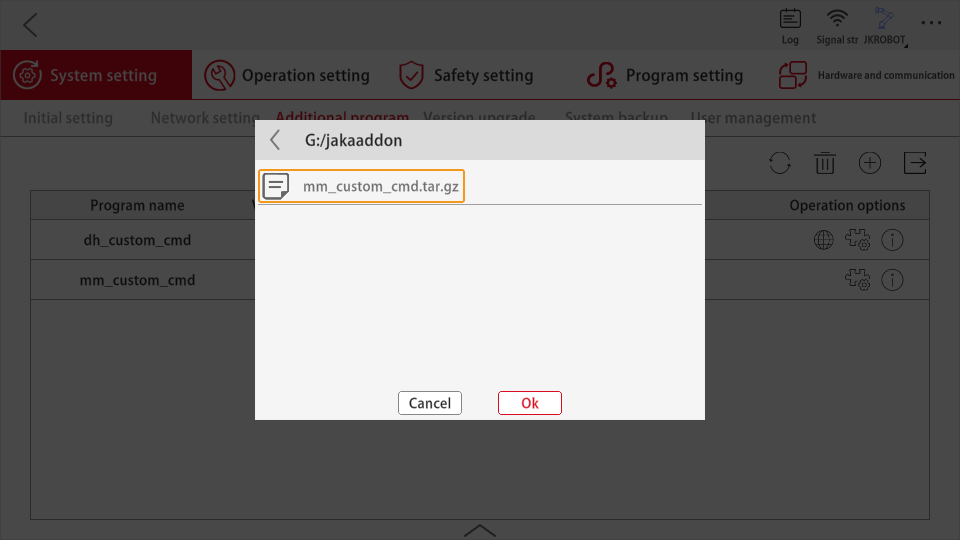
Cliquez sur Programme additionnel → + → ···.
-
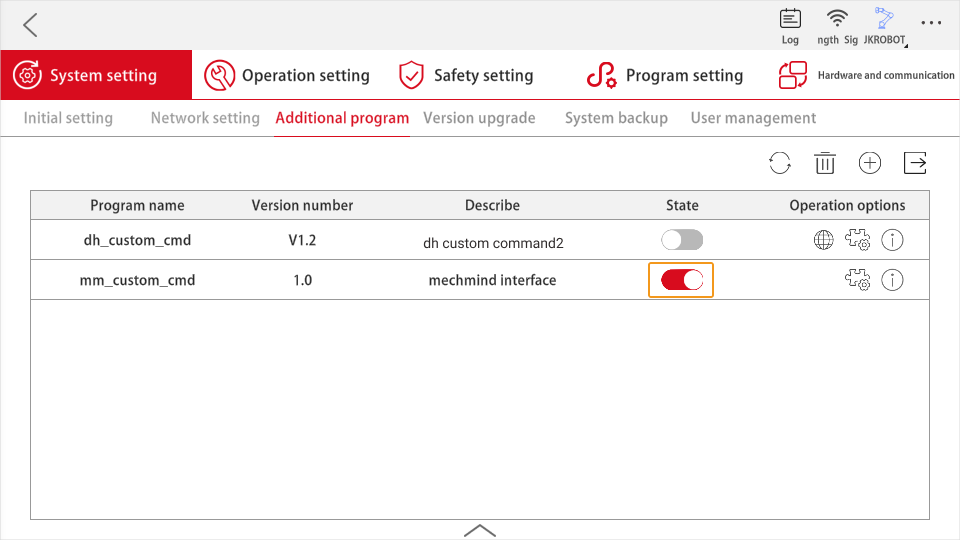
Sélectionnez le fichier mm_custom_cmd.tar.gz et cliquez sur OK. Les informations du programme mm_custom_cmd apparaîtront alors dans la liste.
-
Cliquez sur le bouton État de mm_custom_cmd pour l’activer.
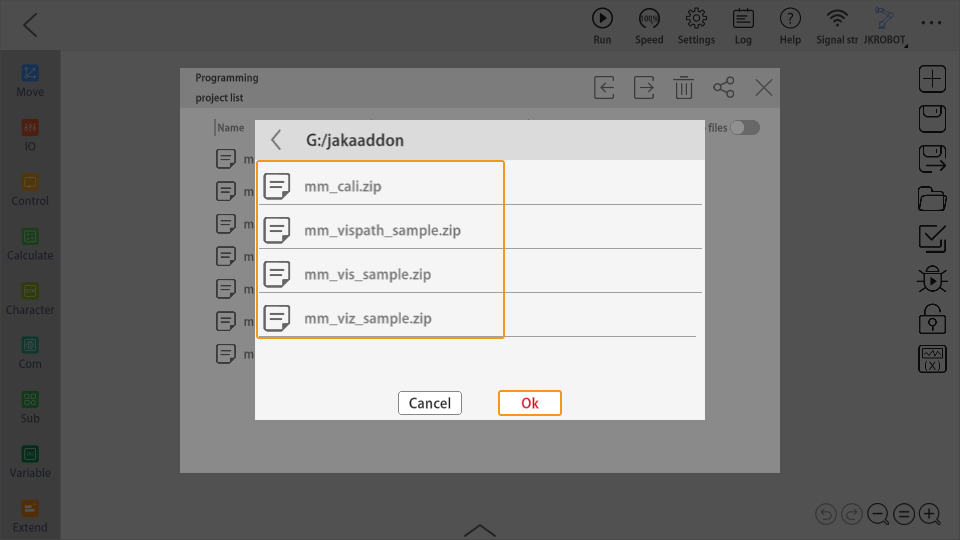
Charger les programmes d’exemple
Sur l’IPC, accédez à Communication Component\Robot_Interface\Robot_Plugin\JAKA_Addon et ouvrez le dossier correspondant à votre version de contrôleur (par ex., 1.7.0). Dans ce dossier, mm_cali.zip, mm_vis_sample.zip, mm_vispath_sample.zip et mm_viz_sample.zip sont des fichiers de programmes d’exemple. Vous devez copier ces fichiers de programme et les coller sur l’appareil où JAKA Zu APP est installée.
-
Revenez à l’interface principale de JAKA, puis cliquez sur Contrôle de programmation dans le coin inférieur gauche.
-
Cliquez sur l’icône de dossier sur le côté droit.
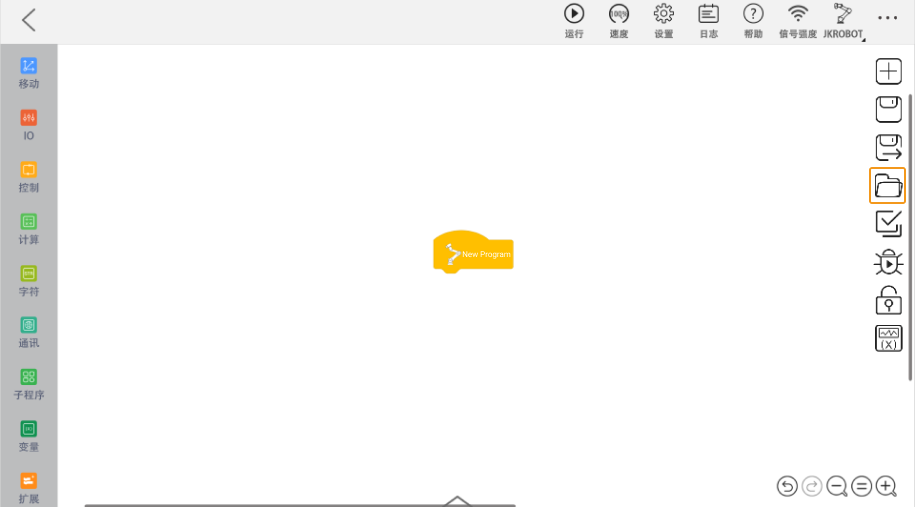
-
Cliquez sur l’icône d’importation.
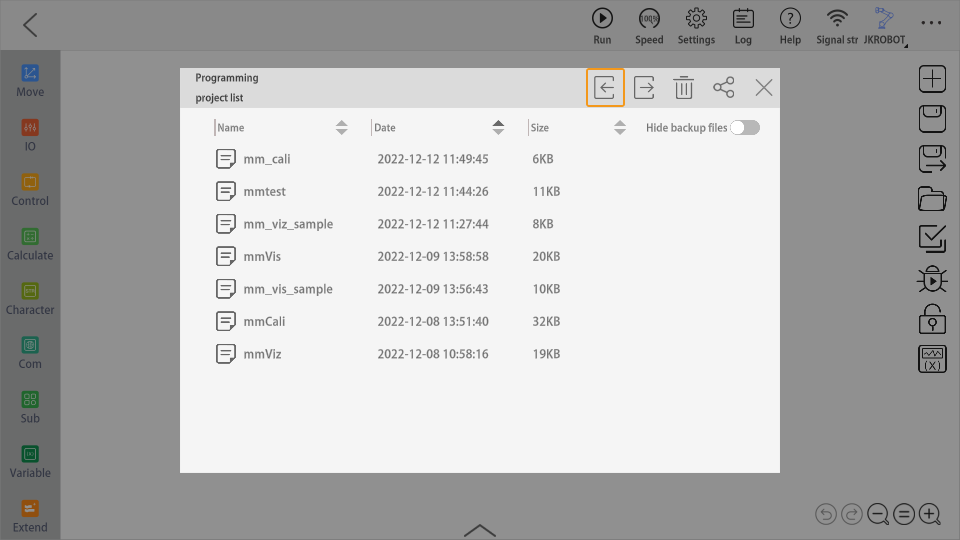
-
Sélectionnez les fichiers illustrés ci-dessous et cliquez sur Ok.
Créer des variables système
Avant d’exécuter le programme, vous devez créer deux variables système, sinon une erreur se produira.
-
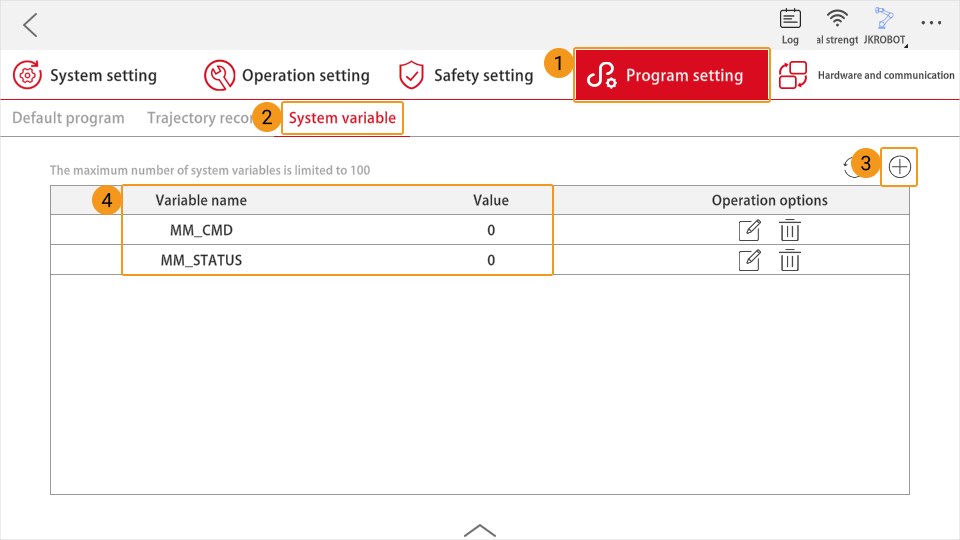
Revenez à l’interface principale de JAKA, et cliquez sur Paramètres dans l’angle supérieur droit.
-
Cliquez sur Paramètres du programme → Variable système, puis cliquez sur le bouton + dans l’angle supérieur droit. Créez deux variables (MM_CMD et MM_STATUS) comme indiqué ci-dessous. Les valeurs initiales sont 0.
Tester la connexion du robot
-
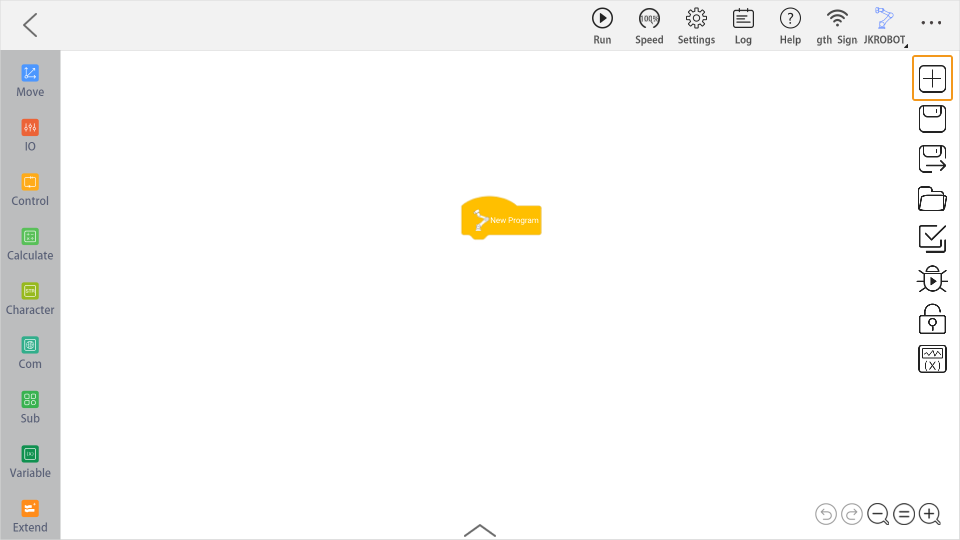
Revenez à l’interface principale de JAKA, puis cliquez sur Contrôle de programmation dans le coin inférieur gauche.
-
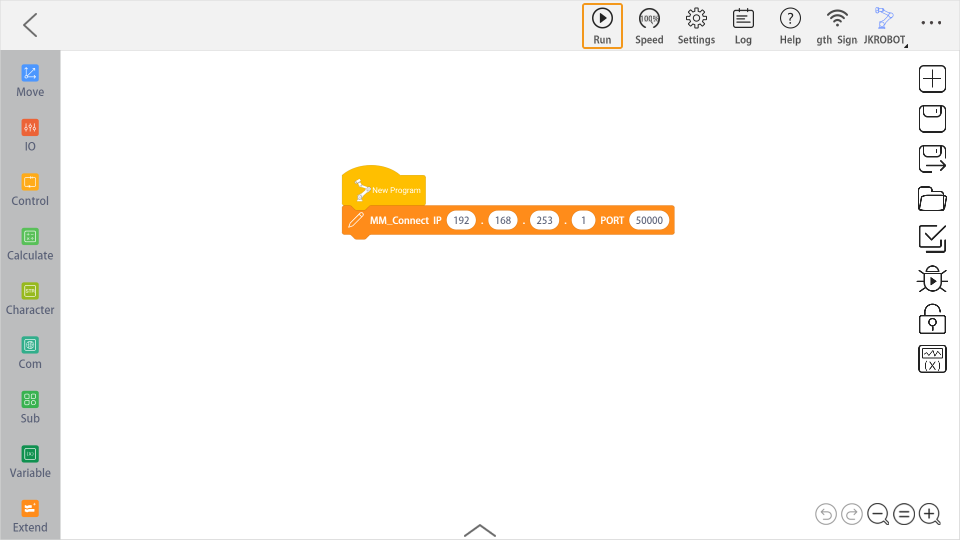
Cliquez sur + à droite pour créer un nouveau programme.
-
Cliquez sur Extension dans le coin inférieur gauche, faites glisser MM_Connect pour l’ajouter à NewProgram, puis définissez l’adresse IP et le numéro de port de l’IPC.
L’adresse IP de l’hôte et celle du robot doivent être sur le même sous-réseau. 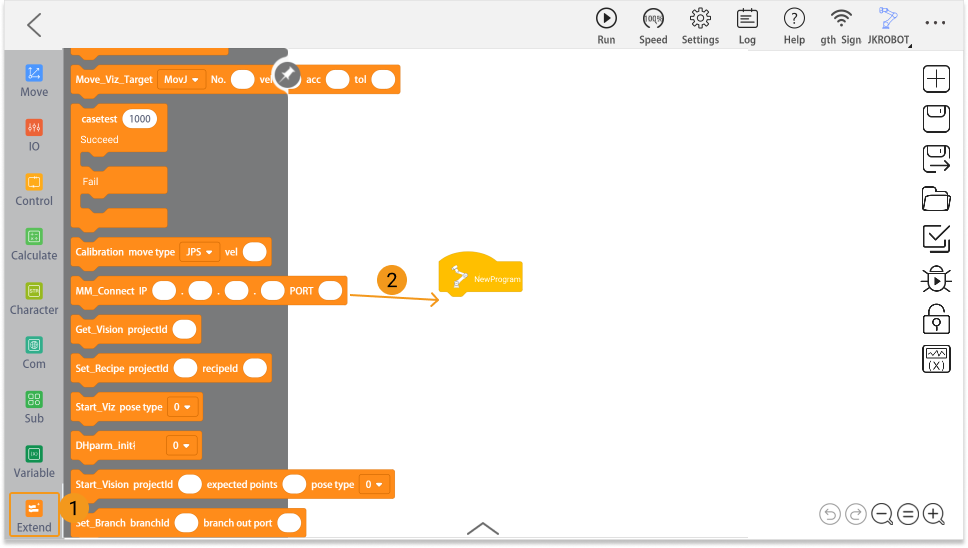
-
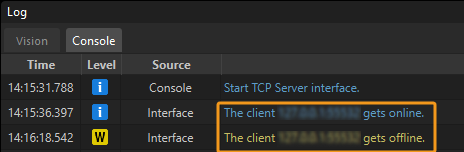
Cliquez sur Exécuter dans la barre d’outils.
-
Si la connexion du robot réussit, l’onglet Console du panneau Log de Mech-Vision affichera un enregistrement.
Une fois le test de communication réussi, poursuivez avec la section suivante pour définir les paramètres DH.
Définir le paramètre DH
En raison des différences entre les paramètres DH réels et théoriques de chaque robot collaboratif, le robot simulé dans Mech-Viz présentera une déviation de la pose de la bride après la synchronisation des positions articulaires avec le robot réel. Dans les applications de haute précision, veuillez suivre la méthode ci-dessous pour définir le paramètre DH afin de minimiser les erreurs.
-
Ouvrez Mech-Viz et créez un nouveau projet vierge. Sélectionnez le modèle de robot JAKA que vous souhaitez utiliser.
-
Sur la page d’accueil de JAKA, cliquez 10 fois sur l’icône du logo en haut à gauche, puis entrez le mot de passe (valeur par défaut : JAKAAMAZING). L’interface suivante s’affichera.
-
Sur le côté gauche de Mech-Viz, cliquez avec le bouton droit sur le nom du robot, sélectionnez Ouvrir le répertoire des fichiers du robot, puis ouvrez le fichier
xxxx_algo.json. -
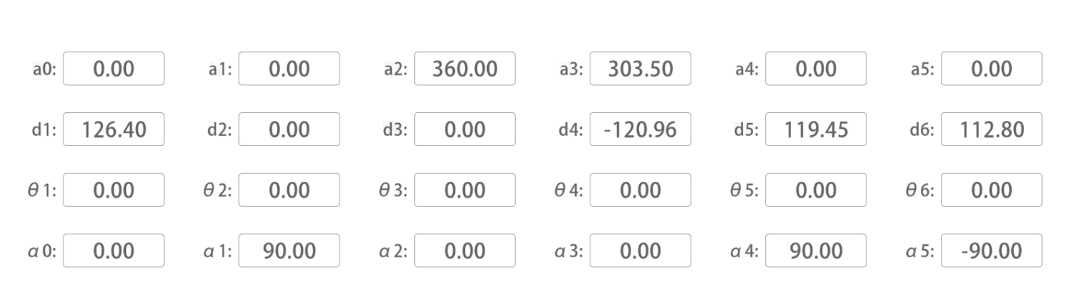
Saisissez les valeurs [d1, a2, a3, d4, d5, d6] de l’image ci-dessus dans le champ dh du fichier
xxxx_algo.json. Ensuite, ouvrez et enregistrez le fichierxxxx_algo.json. -
Sur le côté gauche de Mech-Viz, cliquez avec le bouton droit sur le nom du robot et sélectionnez Recharger le robot.
En raison de l’impossibilité d’ajuster les valeurs shoulder_offset et elbow_offset dans le fichier xxxx_algo.json.json, il peut subsister certaines erreurs dans le mouvement du robot.