Programme d’exemple 21 : MM_S21_1Robot_3IPC_Sequentially
Présentation du programme
Description |
Le robot se connecte à plusieurs IPC, ce qui signifie qu’un seul robot peut contrôler plusieurs systèmes de vision. |
||
Chemin du fichier |
Vous pouvez accéder au répertoire d’installation de Mech-Vision et Mech-Viz et trouver le fichier en utilisant le chemin |
||
Projet |
Projets Mech-Vision et Mech-Viz
|
||
Prérequis |
|
| Ce programme d’exemple est fourni uniquement à titre de référence. Avant d’utiliser le programme, veuillez le modifier en fonction du scénario réel. |
Description du programme
Cette section décrit le programme d’exemple MM_S21_1Robot_3IPC_Sequentially.
| Ce programme d’exemple se concentre sur la façon de connecter un robot à plusieurs IPC. Pour savoir comment un système de vision s’exécute sur chaque IPC, consultez la description correspondante dans Programme d’exemple 5 : MM_S5_Viz_SetBranch. |
1: !-------------------------------- ;
2: !FUNCTION: set up communication ;
3: !between 1Robot and 3IPC ;
4: !Sequentially ;
5: !Mech-Mind, 2024-4-25 ;
6: !-------------------------------- ;
7: ;
8: !set current uframe NO. to 0 ;
9: UFRAME_NUM=0 ;
10: !set current tool NO. to 1 ;
11: UTOOL_NUM=1 ;
12: LBL[10] ;
13: ;
14: !initialize communication ;
15: !parameters(initialization is ;
16: !required once change IPC tcp ;
17: !service ;
18: CALL MM_INIT_SKT('6','192.168.1.20',50000,5) ;
19: !trigger Mech-Viz project ;
20: CALL MM_START_VIZ(0,60) ;
21: WAIT .20(sec) ;
22: !set branch, "MM_SET_BCH ;
23: CALL MM_SET_BCH(1,1) ;
24: ;
25: !initialize communication ;
26: !parameters(initialization is ;
27: !required once change IPC tcp ;
28: !service ;
29: CALL MM_INIT_SKT('7','192.168.1.200',50000,5) ;
30: !trigger Mech-Viz project ;
31: CALL MM_START_VIZ(0,61) ;
32: WAIT .20(sec) ;
33: !set branch, "MM_SET_BCH ;
34: CALL MM_SET_BCH(1,2) ;
35: ;
36: !initialize communication ;
37: !parameters(initialization is ;
38: !required once change IPC tcp ;
39: !service ;
40: CALL MM_INIT_SKT('8','192.168.1.50',50000,5) ;
41: !trigger Mech-Viz project ;
42: CALL MM_START_VIZ(0,62) ;
43: WAIT .20(sec) ;
44: !set branch, "MM_SET_BCH ;
45: CALL MM_SET_BCH(1,2) ;
46: ;
47: !initialize communication ;
48: !parameters(initialization is ;
49: !required once change IPC tcp ;
50: !service ;
51: CALL MM_INIT_SKT('6','192.168.1.20',50000,5) ;
52: !get planned path, 1st argument ;
53: !(1) means getting pose in JPs ;
54: CALL MM_GET_VIZ(1,51,52,53) ;
55: !save the first waypoint of the ;
56: !planned path to local variables ;
57: !one by one ;
58: CALL MM_GET_JPS(1,70,71,72) ;
59: ;
60: !initialize communication ;
61: !parameters(initialization is ;
62: !required once change IPC tcp ;
63: !service ;
64: CALL MM_INIT_SKT('7','192.168.1.200',50000,5) ;
65: !get planned path, 1st argument ;
66: !(2) means getting pose in TCP ;
67: CALL MM_GET_VIZ(2,54,55,56) ;
68: !save the first waypoint of the ;
69: !planned path to local variables ;
70: !one by one ;
71: CALL MM_GET_POS(1,71,73,74) ;
72: ;
73: !initialize communication ;
74: !parameters(initialization is ;
75: !required once change IPC tcp ;
76: !service ;
77: CALL MM_INIT_SKT('8','192.168.1.50',50000,5) ;
78: !get planned path, 1st argument ;
79: !(1) means getting pose in JPs ;
80: CALL MM_GET_VIZ(1,57,58,59) ;
81: !save the first waypoint of the ;
82: !planned path to local variables ;
83: !one by one ;
84: CALL MM_GET_JPS(1,72,75,76) ;
85: ;
86: WAIT 5.00(sec) ;
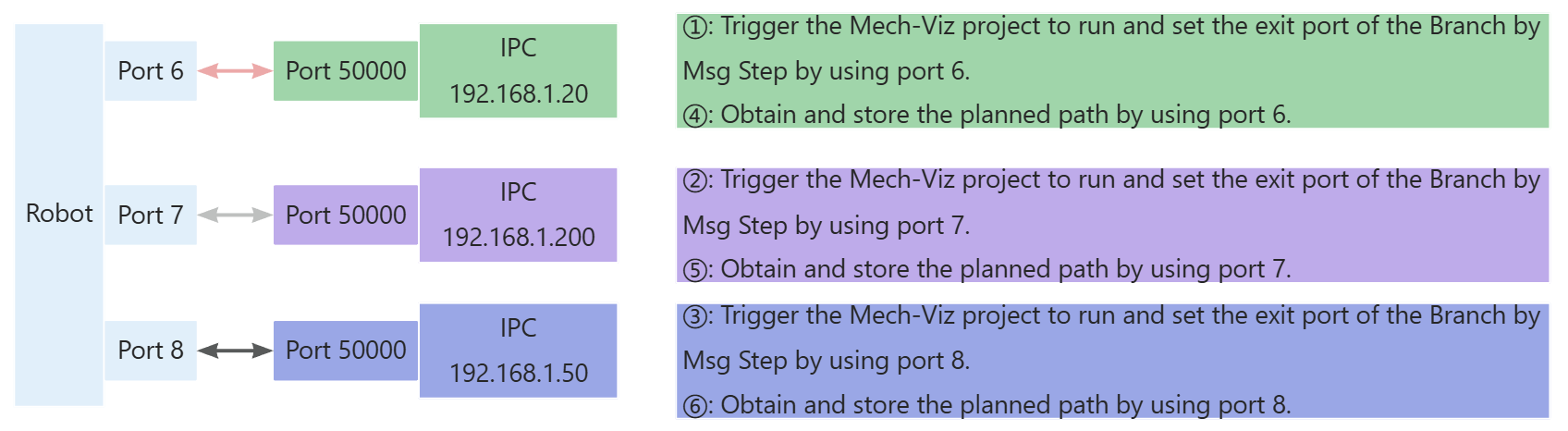
87: JMP LBL[10] ;Le processus correspondant au code du programme d’exemple ci-dessus est illustré dans la figure ci-dessous. ① à ⑥ indiquent l’ordre d’exécution du programme.
Le tableau ci-dessous décrit le code ci-dessus. Vous pouvez cliquer sur l’hyperlien du nom de commande pour en afficher la description détaillée.
| Adresse IP de l’IPC et numéro de port | Code et description | ||
|---|---|---|---|
192.168.1.20:50000 |
Pour établir la communication entre le robot et l’IPC, utilisez le port 6 du robot, l’adresse IP 192.168.1.20 et le port 50000 de l’IPC. La procédure est la suivante.
|
|
Un robot FANUC fournit 8 ports dans les paramètres système, comme illustré dans la figure suivante. Lorsque vous utilisez un port non défini dans la commande MM_INIT_SKT, vous devez redémarrer le contrôleur pour que les modifications prennent effet. Sinon, le robot ne pourra pas communiquer avec le système de vision et une erreur sera signalée. 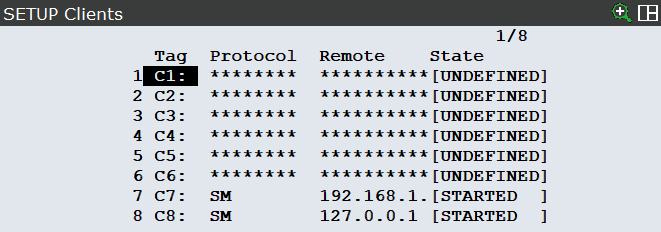
|