mm_viz_pick_and_place
Ce programme d’exemple déclenche le projet Mech-Viz pour planifier une trajectoire du robot et déplacer le robot vers le premier point de passage.
|
Veuillez vous assurer que le script Lua s’exécute en arrière-plan. Sinon, la communication entre le robot et la suite logicielle ne peut pas être établie. |
Logique du programme
NOP
WAIT B099 = 0
SET B109 1
//run viz pose type
SET B099 4
//start viz
WAIT B099 = 0
// SET B110 1
// //set branch id
// SET B111 1
// //set branch out port
// SET B099 5
// //set branch
// WAIT B099 = 0
// SET B112 2
// //set index id
// SET B113 1
// //set index out port
// SET B099 6
// //set index
// WAIT B099 = 0
SET B114 2
// receive viz pose type
SET B099 7
// receive from viz
WAIT B099 = 0
SET B099 9
// set viz to v101-v120 p101-p120
WAIT B099 = 0
// MOVL V100 V=100MM/S CR=0.000MM
END-
Ligne 3: Définir le type de pose à envoyer à Mech-Viz (2 signifie envoyer les JPs actuels et la pose de la bride).
-
Ligne 5: Envoyer la commande pour déclencher l’exécution du projet Mech-Viz.
-
Ligne 8: Définir l’ID de l’étape « Branche par Msg » pour laquelle une sélection de branche est requise.
-
Ligne 10: Définir le port de sortie à emprunter pour l’étape ci-dessus.
-
Ligne 12: Envoyer la commande pour sélectionner la branche par laquelle le projet Mech-Viz doit se poursuivre.
-
Ligne 15: Définir l’ID de l’étape ayant le paramètre Current Index.
-
Ligne 17: Définir la valeur du paramètre Current Index dans l’étape ci-dessus.
-
Ligne 19: Envoyer la commande pour définir le paramètre Current Index.
-
Ligne 22: Définir le type de pose de point de passage à obtenir depuis Mech-Viz (2 signifie obtenir des poses de points de passage en tant que TCPs).
-
Ligne 24: Envoyer la commande pour obtenir la trajectoire planifiée.
-
Ligne 27: Envoyer la commande pour enregistrer les poses de points de passage obtenues depuis Mech-Viz dans les variables V101-V120 (Si les poses de points de passage obtenues sont des JPs, elles sont stockées dans les variables P101 à P120).
-
Ligne 30: Déplacer le robot vers la pose de point de passage obtenue. Modifiez la commande et/ou ajoutez d’autres commandes de mouvement du robot selon les besoins réels.
Exécuter le programme mm_viz_pick_and_place
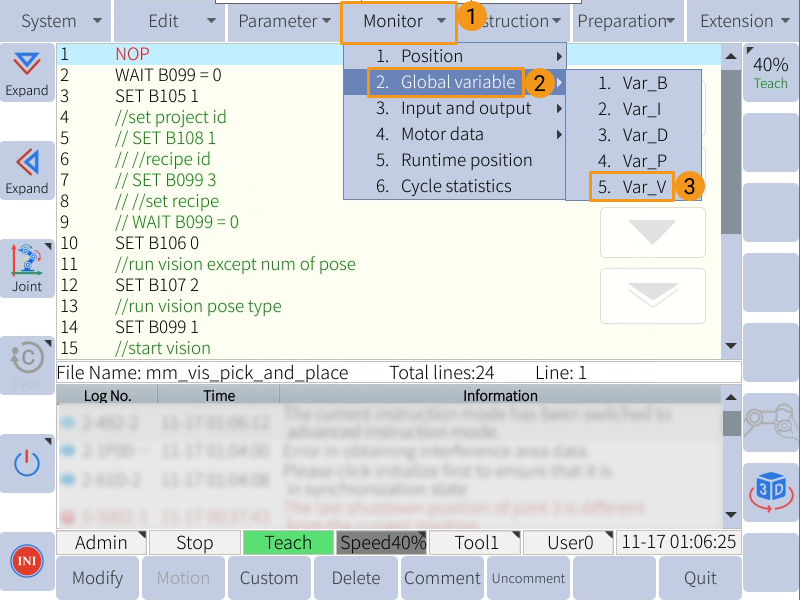
Ouvrir les variables nécessaires
Étant donné que les poses de points de passage reçues de Mech-Viz seront stockées dans les variables V101 à V120 (si TCP) ou P101 à P120 (si JPs), veuillez d’abord ouvrir ces 40 variables selon les étapes suivantes.
-
Sur le boîtier d’enseignement, appuyez sur .
Si le point dans la colonne Statut est rouge, la variable n’est pas ouverte. Sélectionnez une variable fermée, puis appuyez sur Ouvrir en bas à gauche pour l’ouvrir.
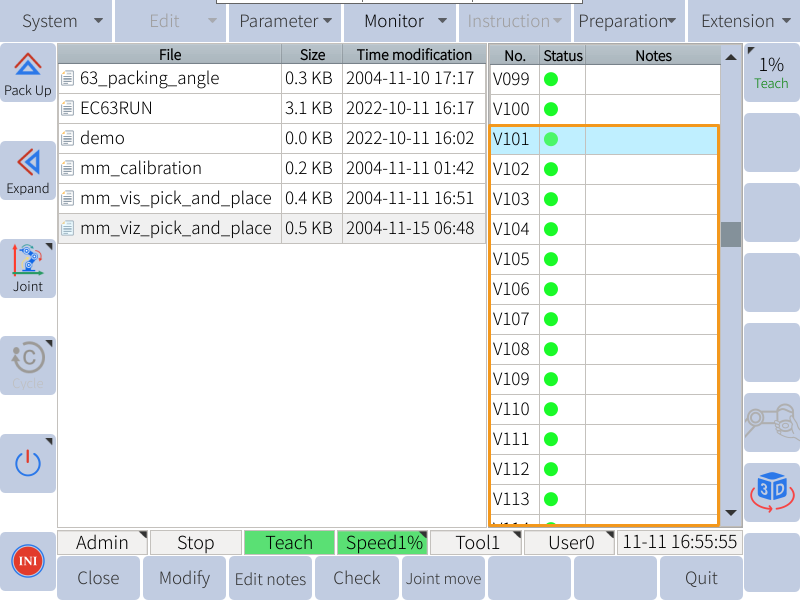
-
De la même manière, appuyez sur et ouvrez toutes les variables P101 à P120.
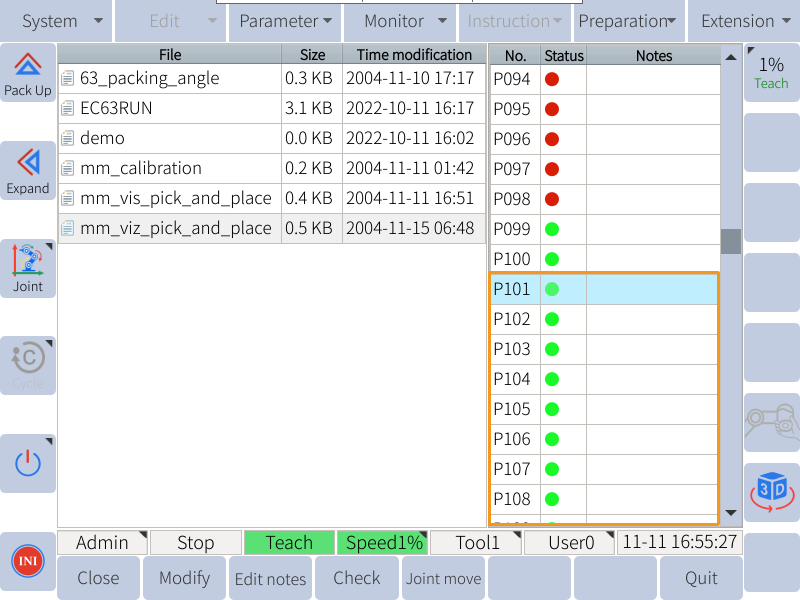
-
Appuyez sur Quitter pour revenir à la page d’accueil.
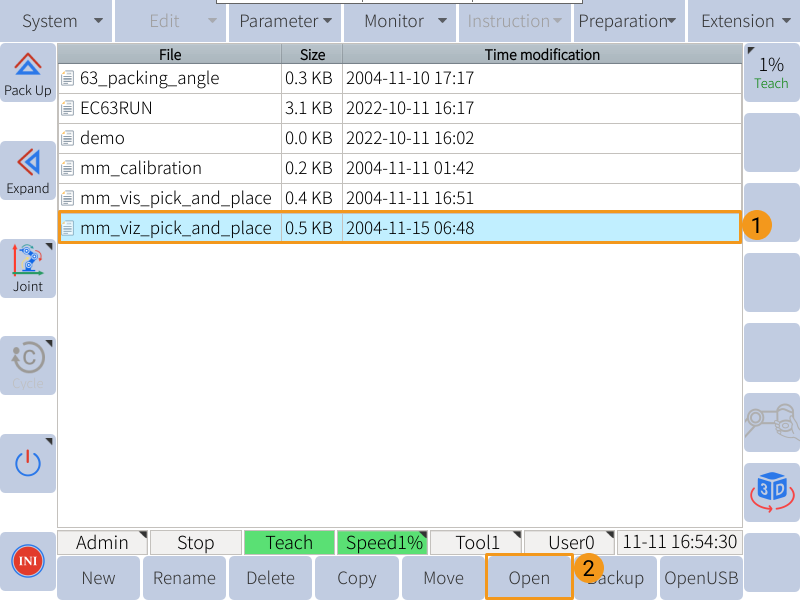
Sélectionner le programme
Sur la page d’accueil, sélectionnez le programme mm_viz_pick_and_place, puis appuyez sur Ouvrir.
Exécuter le programme
-
Déplacez le curseur sur la première ligne du programme et tournez la clé sur PLAY.
-
Appuyez sur le bouton jaune en bas à droite du boîtier d’enseignement pour démarrer les moteurs servo, puis appuyez sur le bouton vert pour exécuter automatiquement le programme.

-
Si le programme s’exécute avec succès, les poses de points de passage reçues seront stockées dans les variables à partir de V101 ou P101, selon le type de poses de points de passage obtenu.