Description du programme Master-Control
Programme Master-Control
Le programme Master-Control contient les composants suivants. Les fichiers SRC sont des fichiers de programme, les fichiers DAT sont des fichiers de données, et les fichiers XML sont des fichiers de configuration de communication.
| Programme | Description |
|---|---|
mm_server.sub |
Programme d’arrière-plan qui reçoit les données Robserver et envoie les données de pose du robot, de signaux et d’état |
mm_server.dat |
Fichier de données pour le programme d’arrière-plan |
motion_control.src |
Programme de premier plan pour contrôler et déplacer le robot |
mainmodule.src |
Module principal de premier plan du programme Master-Control |
mainmodule.dat |
Fichier de données pour le module principal du programme Master-Control |
mm_status.xml |
Fichier de configuration pour la communication de l’état du robot |
mm_motion.xml |
Fichier de configuration pour la communication des mouvements du robot |
Signaux
Le programme prend en charge 16 signaux DI et DO par défaut. L’utilisateur peut étendre à 64 signaux DI et DO en modifiant le fichier du programme.
Méthode : Ouvrez le fichier mm_server, ajoutez un point-virgule (symbole de commentaire) au début de la ligne 290 et supprimez le point-virgule au début de la ligne 291.
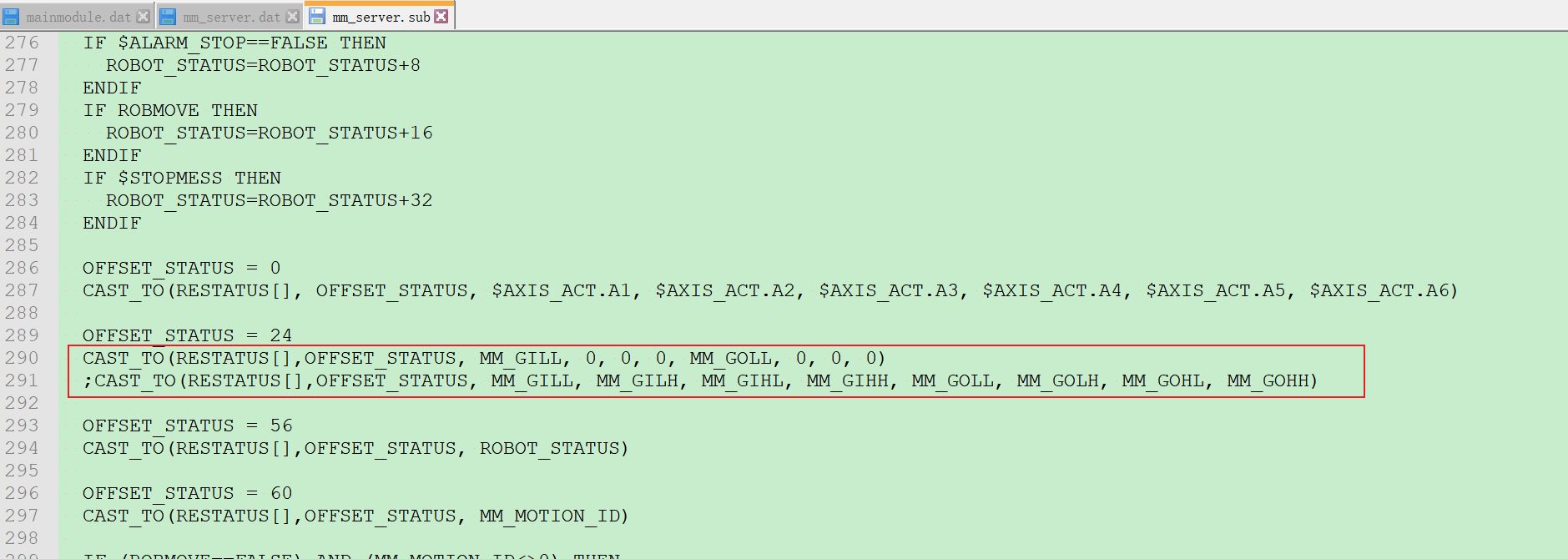
Tableau des signaux
| Indicateur interne | Description |
|---|---|
$FLAG[1] |
Indicateur indiquant que mm_motion s’est connecté avec succès |
$FLAG[2] |
Indicateur indiquant que mm_motion a reçu des données |
$FLAG[5] |
Indicateur indiquant que mm_status s’est connecté avec succès |
$FLAG[6] |
Indicateur indiquant que mm_status a reçu des données |
| E/S utilisées | Signal |
|---|---|
DI (16) |
$IN[1] - $IN[16] |
DO (16) |
$OUT[1] - $OUT[16] |
DI (64) |
$IN[1] - $IN[64] |
DO (64) |
$OUT[1] - $OUT[64] |