Comment exécuter en arrière-plan les programmes de l’interface standard pour robots ABB ?
Pour les robots ABB, un programme Standard Interface peut contenir un programme principal et un programme secondaire. Lorsque le programme principal appelle le programme secondaire, le programme principal est considéré comme un programme au premier plan, tandis que le programme secondaire est considéré comme un programme d’arrière-plan devant s’exécuter automatiquement au démarrage du système robotisé. Ce guide décrit principalement comment créer un programme d’arrière-plan Standard Interface pour un robot ABB et faire en sorte que ce programme s’exécute en arrière-plan.
| Avant de commencer, assurez-vous que la communication ABB Standard Interface est configurée. |
Créer et exécuter un programme d’arrière-plan
-
Utilisez RobotStudio pour connecter le robot, puis sélectionnez pour créer un programme secondaire tel que mm_vision qui s’exécute en arrière-plan.
Lors de la première création d’un programme secondaire, vous pouvez définir Type sur Normal pour le programme et écrire le code du programme dans ce mode. Après que le programme a réussi le test, définissez Type sur Semistatic pour le programme, ce qui indique que le programme sera automatiquement exécuté en arrière-plan. 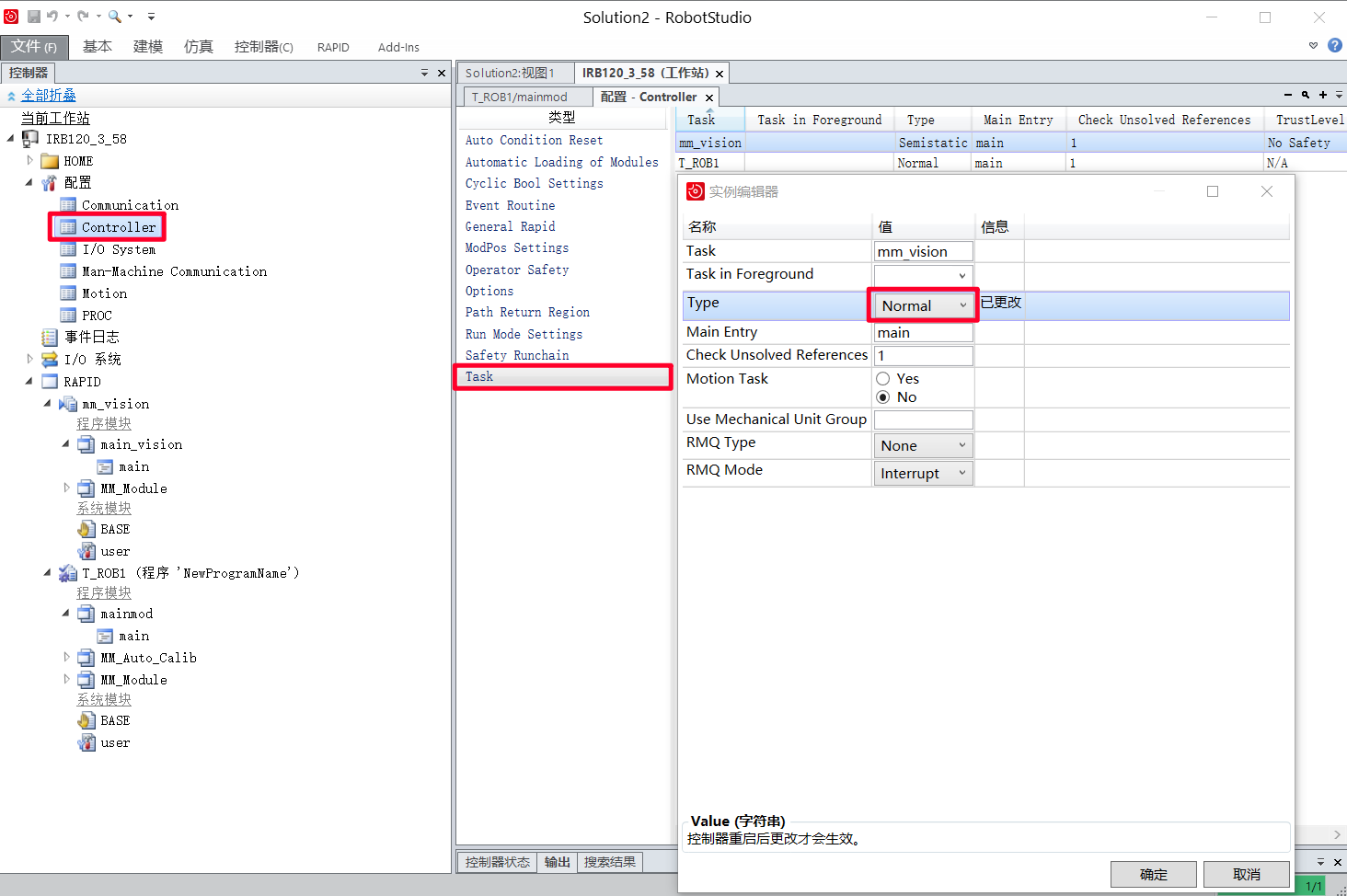
-
Redémarrez le contrôleur.
-
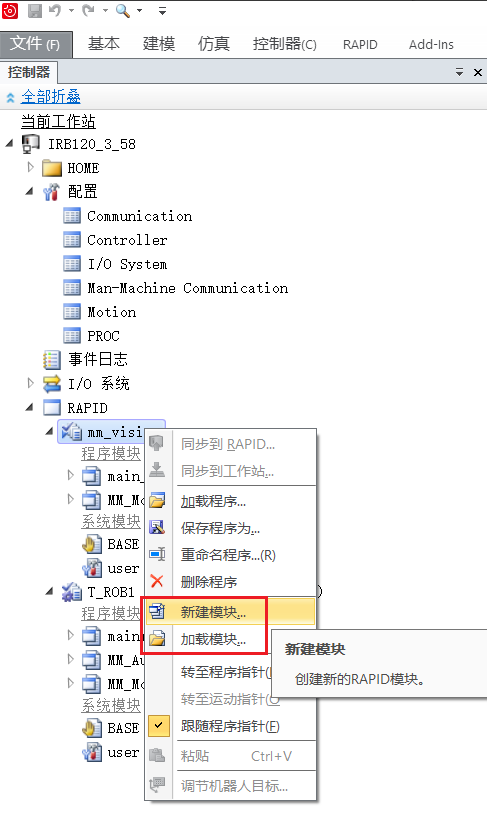
Après avoir redémarré le contrôleur, chargez le module Standard Interface MM_Module dans mm_vision, puis créez un module nommé main_vision.
-
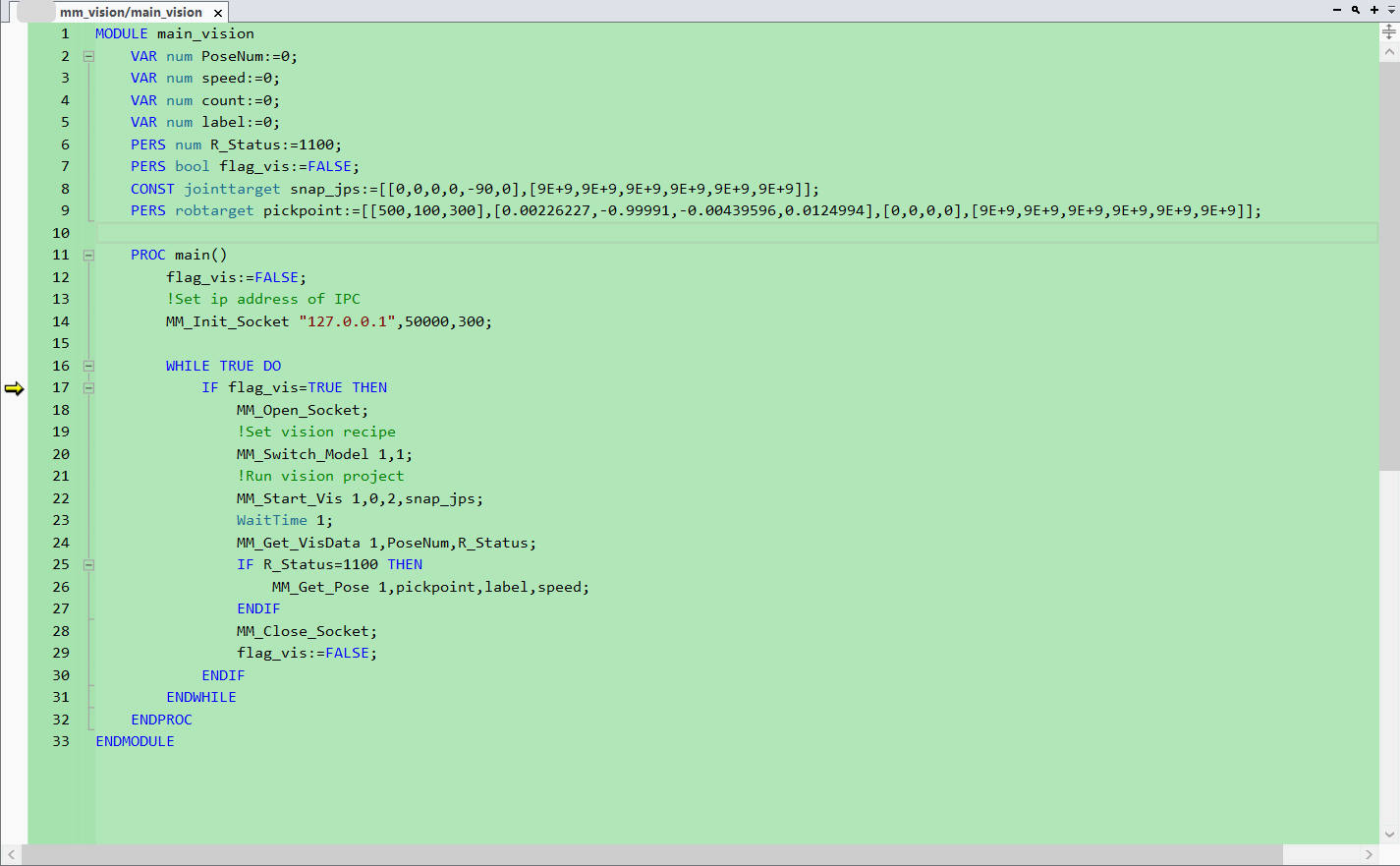
Ouvrez le module main_vision et écrivez le code du module. Par exemple, l’exemple de code dans la figure suivante indique de déclencher l’exécution du projet Mech-Vision et d’obtenir le résultat de vision.
-
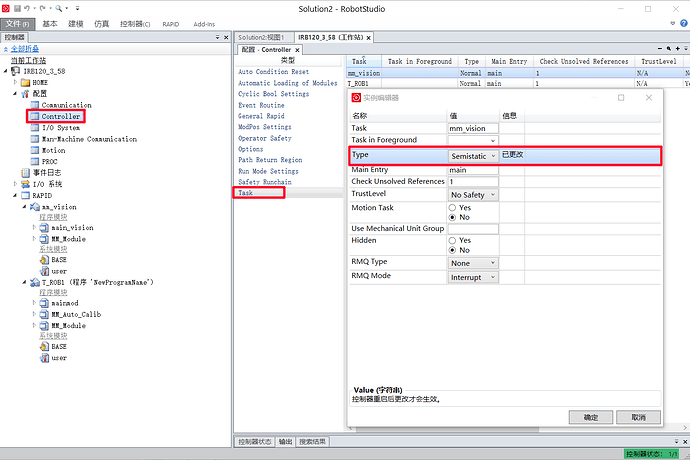
Après que le code a réussi le test, définissez le Type de mm_vision sur Semistatic, puis redémarrez le contrôleur pour permettre à mm_vision de s’exécuter automatiquement en arrière-plan.
Créer et exécuter un programme au premier plan
-
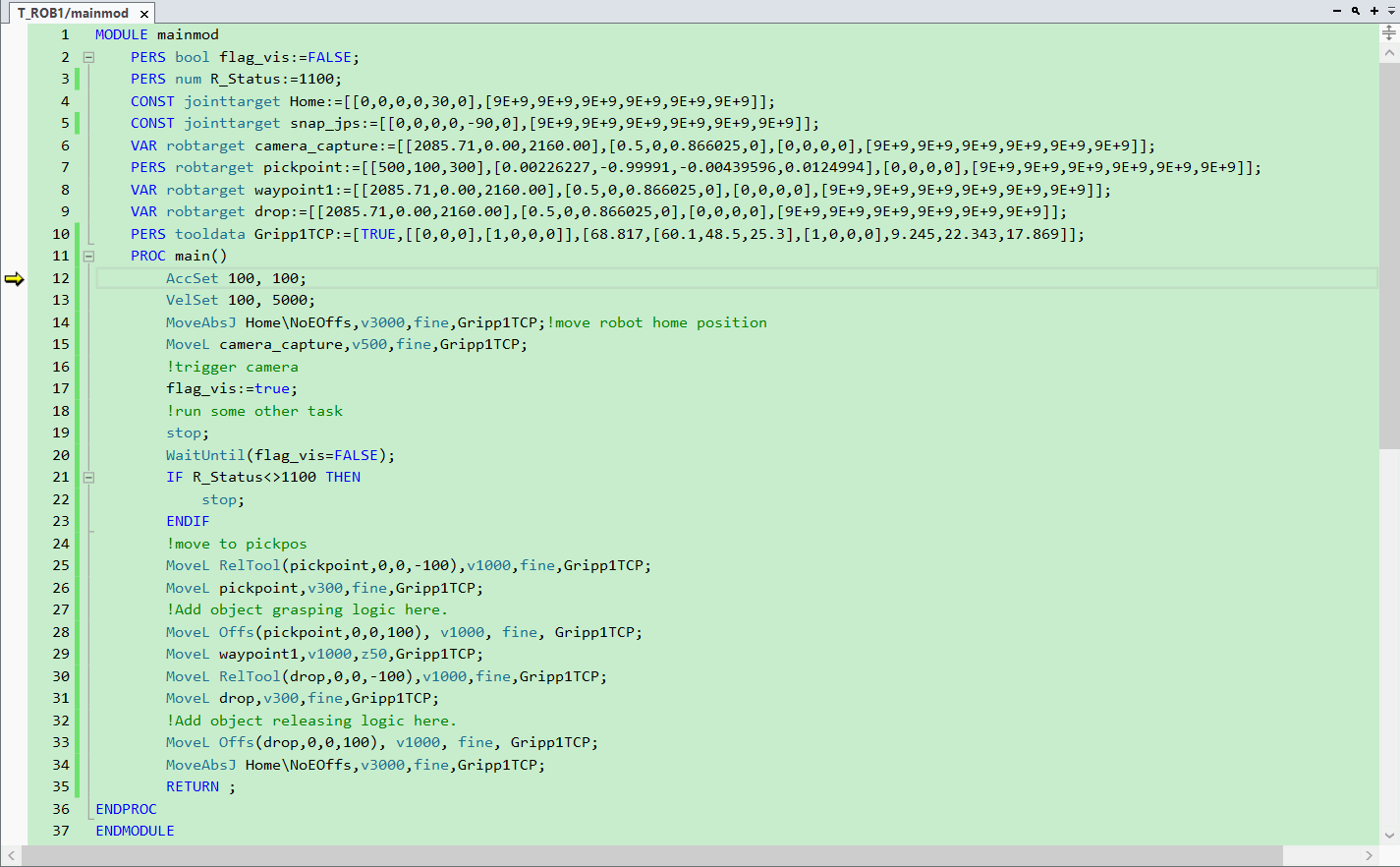
Créez un fichier de programme au premier plan et écrivez le code du programme en fonction du flux de travail réel. Par exemple, l’exemple de code dans la figure suivante indique que le programme au premier plan appelle le programme secondaire lorsque flag_vis est défini sur true.
-
Après vous être assuré que le programme d’arrière-plan peut s’exécuter normalement, vous pouvez exécuter le programme au premier plan. Pour plus d’informations, voir Exécuter le programme d’étalonnage.