Comment exécuter en arrière-plan les programmes Standard Interface pour les robots Kawasaki ?
Pour les robots Kawasaki, un programme Standard Interface peut contenir un programme principal et un programme secondaire. Lorsque le programme principal appelle le programme secondaire, le programme principal est considéré comme un programme au premier plan, tandis que le programme secondaire est considéré comme un programme d’arrière-plan devant s’exécuter automatiquement après le démarrage du système du robot. Ce guide décrit principalement comment créer un programme d’arrière-plan Standard Interface pour un robot Kawasaki et permettre à ce programme de s’exécuter en arrière-plan.
| Avant de commencer, assurez-vous que la communication Standard Interface Kawasaki est configurée. |
-
Créez un fichier texte nommé loadme sur votre ordinateur, changez l’extension du fichier en as, puis ouvrez le fichier avec le Bloc-notes.
-
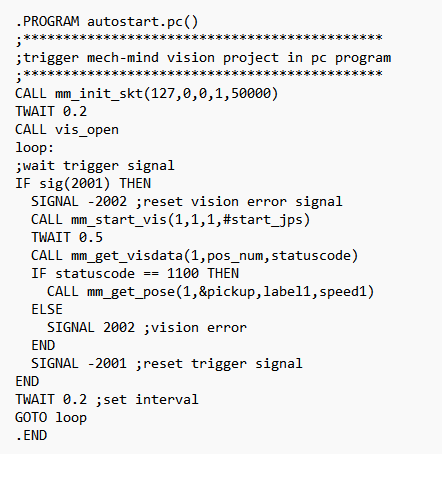
Dans le fichier loadme.as, saisissez le code du programme d’arrière-plan autostart.pc, comme illustré dans la figure suivante. Ce programme indique que si le signal interne 2001 est détecté, il déclenchera l’exécution du projet Mech-Vision et obtiendra le résultat de vision.
-
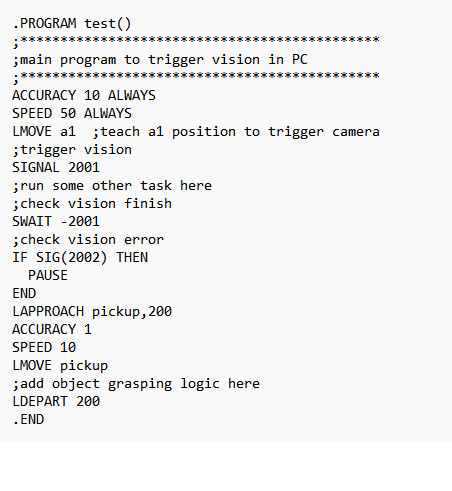
Dans le fichier loadme.as, saisissez le code du programme au premier plan test, comme illustré dans la figure suivante. Ce programme indique que le signal 2001 est déclenché à la position de prise de vue de la caméra. Si le résultat de vision est obtenu avec succès, le robot se déplacera jusqu’au point de vision pour la préhension.
-
Chargez le fichier loadme.as sur le robot. Pour plus d’informations, voir Configurer la communication Standard Interface avec Kawasaki.
-
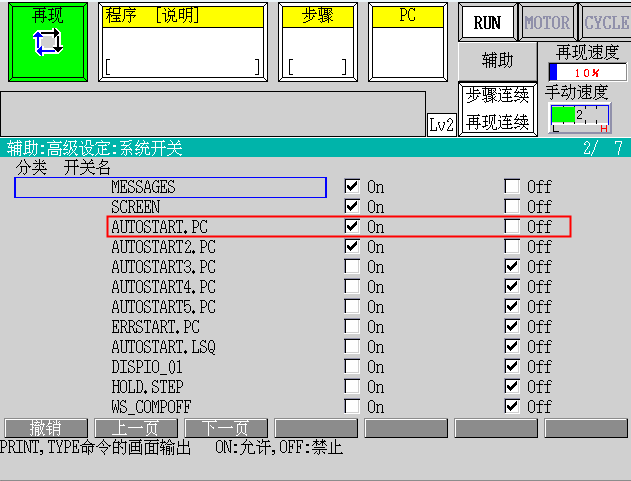
Sélectionnez , réglez AUTOSTART.PC sur ON pour permettre le démarrage automatique d’AUTOSTART.PC au démarrage du robot, puis appuyez sur le bouton Se connecter pour confirmer.
-
Dans la fenêtre de sélection programme, sélectionnez le programme au premier plan test.
-
Redémarrez le contrôleur pour exécuter le programme d’arrière-plan.
-
Pour savoir comment exécuter le programme au premier plan test, voir Exécuter le programme d’étalonnage.