Comment exécuter en arrière-plan les programmes de l’Interface Standard pour robots FANUC ?
Pour les robots FANUC, un programme de l’Interface Standard peut contenir un programme principal et un programme secondaire. Lorsque le programme principal appelle le programme secondaire, le programme principal est considéré comme un programme au premier plan, tandis que le programme secondaire est considéré comme un programme d’arrière-plan qui doit s’exécuter automatiquement après le démarrage du système robotisé. Ce guide décrit principalement comment créer un programme d’arrière-plan de l’Interface Standard pour un robot FANUC et le faire s’exécuter en arrière-plan.
| Avant de commencer, veuillez vous assurer que La communication Interface Standard FANUC est configurée. |
-
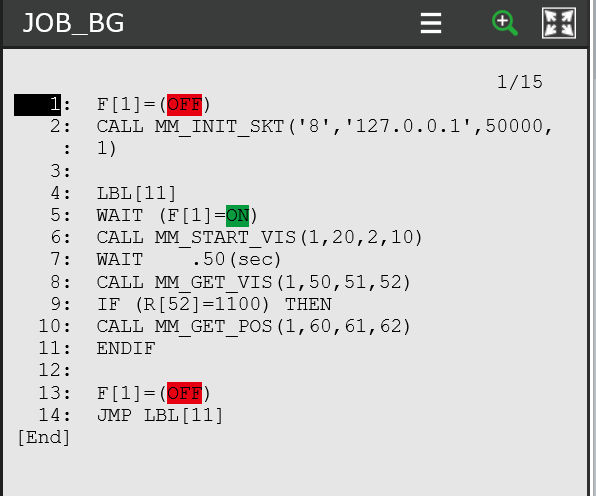
Créez un programme pouvant s’exécuter en arrière-plan. Par exemple, le code d’exemple illustré dans la figure suivante indique de déclencher l’exécution du projet Mech-Vision et d’obtenir le résultat de vision.
-
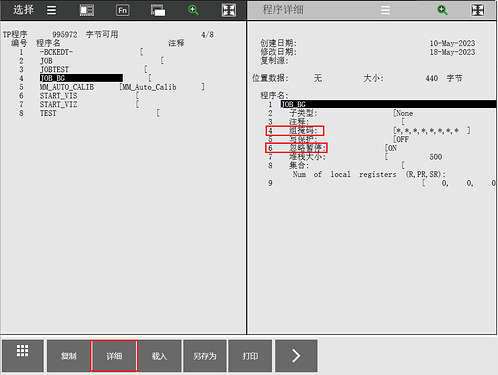
Sélectionnez le programme et choisissez Détail. Ensuite, remplacez toutes les entrées de Masque de groupe par * pour indiquer que ce programme n’occupe aucun groupe de mouvement et réglez Ignorer la pause sur ON afin d’indiquer que ce programme ignorera les signaux de pause externes.
-
Créez un fichier de programme au premier plan et écrivez le code du programme en fonction du flux de travail réel. Par exemple, le code d’exemple de la figure suivante indique que le programme au premier plan appelle la commande RUN pour exécuter le programme d’arrière-plan lorsque F[1] est sur ON.
La commande RUN déclenche l’exécution du programme d’arrière-plan mais n’arrête pas le programme au premier plan. 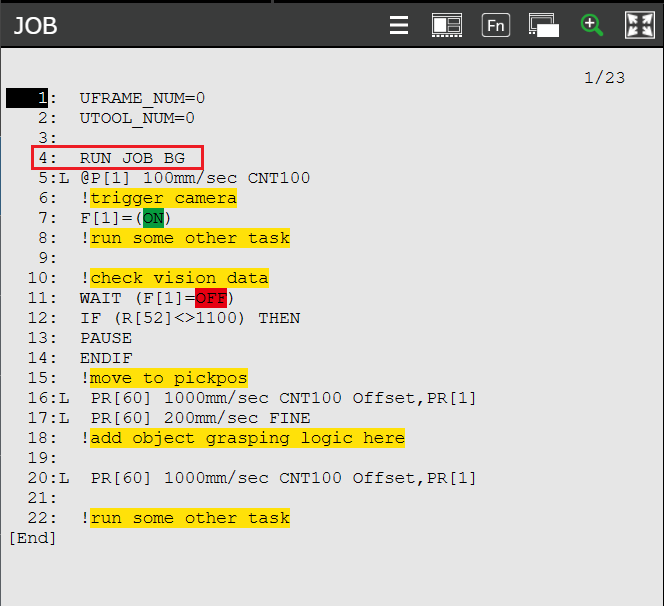
-
Pour savoir comment exécuter le programme au premier plan, consultez Exécuter le programme d’étalonnage.